崇友MJ-3门机调试资料
DO 门机调试说明
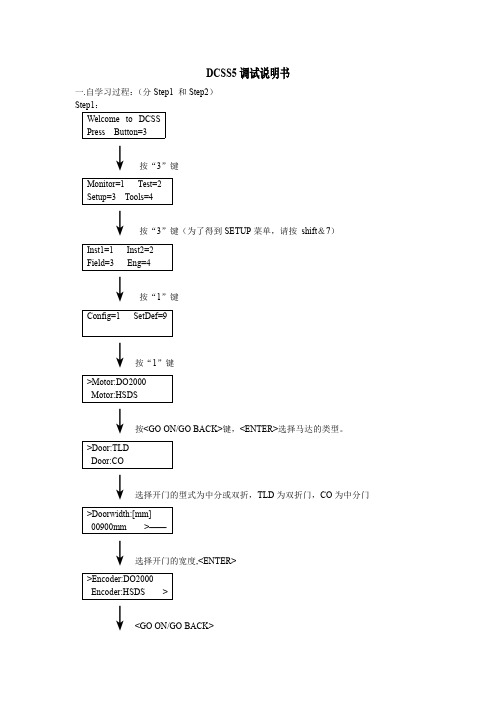
DCSS5调试说明书一.自学习过程:(分Step1和Step2)Step1:Welcome to DCSSPress Button=3↓按“3”键Monitor=1Test=2Setup=3Tools=4↓按“3”键(为了得到SETUP菜单,请按shift&7)Inst1=1Inst2=2Field=3Eng=4↓按“1”键Config=1SetDef=9↓按“1”键>Motor:DO2000Motor:HSDS↓按<GO ON/GO BACK>键,<ENTER>选择马达的类型。
>Door:TLDDoor:CO↓选择开门的型式为中分或双折,TLD为双折门,CO为中分门>Doorwidth:[mm]00900mm>——↓选择开门的宽度,<ENTER>>Encoder:DO2000Encoder:HSDS>↓<GO ON/GO BACK>>Encoder:user defined>↓选择编码器的类型,<ENTER>Step2:1.感觉测试:Sense TestPrep Sense TestPlease wait!Door is opening?<1>YES<0>NO↓观察门的移动并回答,如果门完全打开,它又开始关门Door is closingPlease wait!↓门完全关闭,又问Door is closed?<1>YES<0>NO回答问题2.学习门的宽度:Learn DOORWAY编码器积累了开关门过程的脉冲来描述门的宽度。
Door is openingPlease wait!当门完全打开,回答下面的问题Door is opened?<1>YES<0>NO如果回答“YES”,门将开始下一个动作。
Door is closingPlease wait!3.学习爬行距离:Learn Creep WaysDCSS5学习门锁距离和转矩必须从开门和关门锁,开门的爬行距离和关门的爬行距离从门锁距离开始。
安松门机调试说明

安松门机调试说明一电气接线说明1.1接线说明U--.V.--W电动机接线L--.N.--220电源24V—A—B----0V编码器接线 C1—P1 关门到位C2—P2 开门到位 C3—P3门障碍 C4---P4系统故障COM—H1关门 COM—H2开门 COM—H3中速关门1.2供电电源使用单相交流电源220V/50HZ,建议5A的C45N等向门机供电。
电源线:棕色L 蓝色N 黄绿E1.3编码器接线出厂时配有编码器连线,只需与控制器紧密连接即可1.4电机线出厂时电机上配有三相电机线,只需与控制器紧密连接即可1.5并行输入/输出信号接线1.5-1 输入输入共有四个共COM的端子,每个输入端子均可独立定义成参数表中H组任意功能,常开或常闭也可以任意定义,但不可重复定义,否则报错。
参数H1—H4,分别对饮输入端子H1—H4.以下为出厂缺省定义。
1.5.1.1 关门输入---即加在COM和H1上的持续通信号1.5.1.2 开门输入---即加在COM和H2上的持续通信号1.5.1.3 慢关门输入--即加在COM和H3上的持续通信号1.5.1.4 电眼信号---在A1=03 门机自动运行时,可以接入电眼保护信号,一般用于演示,正常运行时门机由端子信号控制,此设定不起作用。
1.5-2 输出输出共有四组相互独立的继电器触点,输出端子均可独立定义成参数表中P组任一功能,常开或常闭也可任意定义。
参数P1—P4 分别对应输出端子对C1---P1到C4—P4.以下为出厂缺省定义:1.5-2.1 关门到位信号---关门到位时C1与P1 导通1.5-2.2 开门到位信号---开门到位时C2 与P2导通1.5-2.3 门障碍信号---开关门遇障碍时C3 与P3导通1.5-2.4 系统故障信号—有系统内部时C4 与P4导通1.5-2.5 关门到位提前输出信号—在关门最后剩下20mm时输出该信号1.6 CAN通信控制信号带有CAN控制端子的门机控制器,不再使用1.5中所描述的并行控制端子。
DCSS5门机

FIMPack目录一.门机介绍二.调试流程三.系统框架图及说明四.电气图FIMPack 一.门机介绍1. 范围“DO2000”是一种VF控制的门驱动系统。
DCSS5作为DO2000门机变频器部分,完全可以替代DCSS4.DCSS5可以通过离散信号于LCBII/TCB建立连接,也可以通过串行通讯和MCSS建立连接.2. 安全的注意事项➢请确保:当门的运动开始时,EDS按钮应处于可接近到的位置上。
➢在DO2000内部,有危险的高电压(>310VDC)与若干个装置连接。
➢在接通主电源之前,必须将该箱体的盖子关闭。
➢在要求重新打开该箱体时,断电后至少等待一分钟,以便能使电源电容器中的能量排放掉!3.安装前的准备工作3.1编码器DO2000需要一个符合下列规格的增量速度编码器:➢每一周具有500个脉冲的两个磁道➢两磁道间相位移+/-45°➢电源电压15V➢输出:开式集电极或NPN推拉线路➢屏蔽电缆➢只能使用经认可的编码器类型,使用其它种类的编码器,将会使功能出现故障的风险增大。
3.2电源一般情况下,电源是由机房内电源开关来直接提供。
位于电梯控制柜中的用于每一个门系统的一个自动切断装置。
可以对随行电缆和DO2000箱体进行保护。
·DO2000需要一个单相230VAC电源。
在没有中心线的情况下,电梯的控制柜上必须安装一个附加的变压器。
额定电压:1*230V-240VAC,50/60HZ,-15%/+10%(195…264VAC)输出电压:3*0…230VAC/3相额定电流:3*1.5Aac/3相FIMPack输出频率:0…128HZ/3相漏电电流:13mA电气输出功率:550VA连续(Un=230V,In=1.5A,I峰值=8A)机械输出功率:输出功率*效率(AC电机)*COSΦ=550W*0.5*0.6=165W3.3电磁噪声和干扰该DO2000可以满足EN12015/16中所给出的要求,其条件为:➢封闭的防护罩➢电机与控制板间的电缆采用屏蔽电缆连接。
GFC MJ--3(2)门机参数设定

GFC MJ—3(2)门机设定
门控基板参数表(二)
1速度数值设定为十六进位。
2P GAIN设定为十六进位
3
主画面0 0 Inport
Outport 00000000
4
操作方法主画面按0 按1 Speed
5设定驱动单元参数
操作方法主画面按3 按1 按0速度按1电流按2电压
按3设定驱动单元参数。
(1)按FUN 可读出此参数数值。
(2)按0----9 可输入此参数数值。
(3)按Enter 可写入此参数数值。
(4)按上键或下键可切换Group B Group F Group G。
(5)按右键可切换Group内子项。
●信号说明
DCC 门安全信号PBA 门机位置误差过大
DT 开门信号T 串列传输异常
GDS 门全关信号DFC 门全关信号检知
18DS 门全开信号DFO 门全开信号检知DERR 门故障信号DC 关门信号输出DREST 门重置信号DO 开门信号输出
ERR1 变频器故障输出WDT 重置(软体故障时亮)EER2 过转矩动作ERR3 门控基板参数异常
●注意
1DO 灯亮时,电梯应开门,若关门将U V W任意两线对调即可。
2电梯开门时,PG 计数递加,若递减将A B相对调。
1参数设定时,先将P00设为00,最后再将P00复位。
2调整P61过转矩检出位准以适应现场情况。
3发现参数混乱时可将P76设为10,重置为出厂值,再依上表设定。
门机控制器使用说明书V1.2

第二章、门机控制器的操作与调试2.1操作显示说明附操作器正面照片(带LOGO和型号),更换掉下面的图片操作器指示灯意义:2.1.1参数操作显示YS-K01门机控制器的操作显示需使用选配件YS-P01操作器。
操作器的显示状态有以下几种状态(根据软件表现更改内容)1.停机状态显示停机状态显示的参数有:输出端子状态、门位置、开门速度、输入端子状态、母线电压,通过》键实现各种状态参数的循环显示选择。
插入实物照片2.运行状态显示运行状态显示的参数有:输出端子状态、门位置、开关门速度设定、当前运行速度、输出电压、输出电流、输出力矩、母线电压、输入端子状态,通过》键实现各种状态参数的循环显示选择。
插入实物照片3.参数编辑状态以设定参数P1.01为230V为例说明:首先按下PRG键,操作器显示-P0-,该菜单为一级菜单显示,然后按∧键显示-P1-,然后按ENTER键进入P1组内部参数组;然后按∧键显示P1.01,按ENTER键进入该功能码,该功能码显示值为220,通过按∧键将值修改为230,按ENTER键确认修改,修改完后功能码组显示P1.02,按PRG键退回一级菜单显示-P1-,按PRG键退回停机或运行监视状态。
插入实物照片4.故障状态显示当控制器处于故障状态时,操作器显示故障码,当故障排除后,按下STOP/RESET键复位故障,操作器恢复到停机状态显示。
故障显示内容参见附录2故障诊断与对策插入实物照片2.1.2 参数上传和下载批处理YS-K01门机控制器为适应电梯行业调试和维护高效率的需求,设计有控制曲线参数存储和批处理功能。
对于相同门宽、相同型号的门机,可以用同样的曲线参数实现门的开关控制,把经验曲线参数从调试效果良好的门机控制器上传到操作器,再从操作器下载到相同门宽、相同型号的门机使用的门机控制器,就可以实现良好的开关门控制。
例如:1号门和2号门宽度相同,门机械配置型号相同,1号门运行曲线调试好后,把控制器A 的曲线参数上传到操作器的相应位置,并编好组号,从操作器对应组号位置把曲线经验参数下载到控制器B ,控制器B 就可以实现对2号门的良好开关门控制。
门机调试步骤

MQ1033-10T门机调试2.将通讯板安装到各个变频器上,将通讯线安装好,保证其接触良好(通讯线包括215IF—PLC与PLC之间,216IF—变频器与PLC之间),在通电前要对电气柜的各线路检查,主要是PLC与变频器以及制动单元、电机等设备检查。
2.1 制动单元制动单元短路插头的选择:每台门机的变频器驱动回路中都与变频器并联着一制动单元,有的设备中有分master和 slave。
则一个设定成master。
其他的设定成slave。
在master制动单元上的5#和6#接线端子上引出两根线接到下一个slave的1#和2#接线端子上。
Master制动单元要将短路插头接到master位置,slave制动单元要将短路插头接到slave位置,在门机上只用到master制动单元,所以短路插头都接到master位置,根据原理图选择正确的电压等级,并将短路插头接到相应的电压位置上,门机全部选择400V。
2.2检查线路:2.2.1检测制动单元的线路:由于制动单元与变频器是并联的,用万用表的欧姆档测量变频器的给定电源正极是否与制动单元的输入电源正极是同一线、给定电源的负极是否与制动单元的输入电源负极为同一线。
由于每个制动单元下P21、N21之间并联一电阻柜,用于电机在反向运行时将多余的电能转化成热能,用万用表测量其阻值(一般情况:大车、起升1、起升2、旋转机构的电阻值为3.2Ω,变幅机构的阻值为13.6Ω)。
测量制动单元内部各接点是否接地,检查其制动单元的接地是否完好。
无误后进行下一步。
2.2.2检查变频器的线路:根据原理图,用万用表的欧姆档测量变频器的输入、输出各项是否接地,是否相间短路(由于有些输出端直接接电机,所以会有一定的电阻值);测量变频器的多功能端子接点是否接地;测量变频器内部的通讯板卡,PG卡各个接线端子是否接地,各个接地端子是否接地完好。
2.2.3检查各机构柜内各个接触器、断路器、空气开关、继电器等开关的线路:分别用万用表的欧姆档测量上述开关的输入、输出各相是否接地,相间是否短路(在测量时相间会有十几千欧的阻值)2.2.4检查编码器的线路:先拔下编码器的插头,用一根短接线和万用表的欧姆档测量线路是否正确,步骤如下:将编码器插头的1孔用短接线接地,在相应变频器的PG卡上用万用表对地分别测量PG卡的电源正极、电源负极、以及反馈的a正、a负、b正、b负的绝缘阻值(一般的1孔和2孔之间的阻值为1.02KΩ,1孔和3孔、1孔和5孔之间的阻值为1.12KΩ,3孔和5孔之间的阻值为1.91KΩ,2孔、4孔、6孔是短接的,为电源的负极),看阻值是否符合。
门机控制器简易调试步骤

门机控制器简易调试步骤1.输入信号的确认【条件】 P08=”1或2”(1为面板控制,2为外部端子控制),P09=“4或5”(磁开关方式,4为单次运行,5为往复运行), P09=”1或2”(编码器方式,1为单次运行,2为往复运行)【步骤】 ◎n16(输入信号状态)的显示的确认。
1. 手动移动DOOR到開/閉到達信号、開/閉变速信号处进行确认,到达时信号接点闭合,此信号即为常开接点,为正逻辑信号,如果到达时信号接点断开,此信号即为常闭接点,为负逻辑信号。
(利用N16号参数可监控输入信号是否正确)N16:输入信号模拟亮灯:输入端子为闭状态消灯:输入端子为开状态2.A/B相输入信号的闪烁确认。
(编码器A B相的信号确认)◎n11(ENCODER 検出状态)的显示确认。
(编码器A B相的接线是否与控制器上相对应,此时P09=1)1).手动向开方向移动DOOR、确认是否显示”F**”。
2).手动向关方向移动DOOR、确认是否显示”r**”。
注意:在双稳态磁开关方式下,试运行时请确认双稳态磁开关的输入逻辑是否正确?变频器的逻辑设定参数为P43号参数,默认输入逻辑为正逻辑(即常开接点)时,P43号参数为0,若输入信号为负逻辑(即常闭信号)时,则根据所处信号的位置设定相应的值给P43号参数,具体设定方法如下图:举例:当关门变速信号和开门变速信号为常闭时,只要将他们的合计值相加,即:16+8=24,把P43设定为24就可以正常运行,依此类推。
2.电机的正、反转的确认【条件】設定频率(Fr)为3-5HzP09=”0”【步骤】按UP+RUN键、确认开动作。
按DOWN+RUN键、确认关动作。
※电机不动作的情况下、请设大P05值。
※方向不对的情况下、U,V,W相的任意两相交换。
3.DOOR幅度的測定(编码器方式下)【条件】・P09=”3” P76=“1”(有关门到位信号时)・P63=“0”P51电机极数,P52编码器线数・P67=“0”P77=0.5 P78=300 P79=0.5(都为推荐值)【步骤】1.按UP+RUN键、测定动作开始。
门机 操作规程
门机操作规程门机操作规程引言概述:门机是一种用于起重和搬运重物的机械设备,广泛应用于工业生产和物流领域。
为了确保门机的安全运行和有效使用,制定门机操作规程是非常重要的。
本文将详细介绍门机操作规程的五个部分,包括操作前的准备工作、门机的启动与停止、门机的起重操作、门机的维护与保养以及应急处理措施。
一、操作前的准备工作:1.1 确认工作区域安全:在操作门机之前,应先检查工作区域是否有障碍物,确保操作空间足够,并清理掉可能影响门机操作的杂物。
1.2 检查门机设备:检查门机的运行状态,包括检查起重装置、传动装置、制动装置、电气系统等是否正常运行,确保门机设备没有损坏或故障。
1.3 确定操作人员:确定操作门机的人员,确保他们具备必要的培训和技能,了解门机的操作流程和安全注意事项。
二、门机的启动与停止:2.1 启动门机:在启动门机之前,操作人员应按照设备说明书或操作手册的要求,逐步启动门机设备,确保设备能够正常运行,并进行必要的预热和试运行。
2.2 停止门机:在停止门机之前,操作人员应先将门机的负载放置在安全位置,并逐步停止门机设备的运行,包括关闭电源开关、刹车装置等,确保门机停止后不会出现意外情况。
2.3 应急停机:在紧急情况下,如发生设备故障或操作失误,操作人员应立即执行应急停机程序,包括按下紧急停机按钮、切断电源等,确保人员和设备的安全。
三、门机的起重操作:3.1 起重准备:在进行起重操作之前,操作人员应先确认起重物的重量和重心位置,选择合适的起重装置,并进行必要的调整和固定,以确保起重物能够安全稳定地被提升和搬运。
3.2 起重操作:在进行起重操作时,操作人员应按照起重物的重量和尺寸,合理调整门机的起升速度和行走速度,确保起重物的平稳提升和搬运,并避免超载和倾覆等危险情况。
3.3 起重注意事项:在起重操作过程中,操作人员应密切观察起重物的运行状态,避免碰撞和摩擦,保持与周围人员和设备的安全距离,并及时发现和处理起重过程中的异常情况。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
社外密MJ-3调整说明:软体版本DMCU V1.2一、简介:MJ-3门系统是配合GF-88P机种开发出的新门系统,使用DMC U基板为主控MCI变频器为驱动装置,适用本公司的全机种产品。
二、式样规格:1、变频器:(1)型号:MCI04ST21A(2)输入规格:AC1PH200V-240V50/60Hz 2.6A(3)输出规格:AC3PH0~240V 1.0kV A 2.5A(5)型号说明:MCI04ST21A变频器系列版本型号最大适用马达容量额定电压:002:0.2KW007:0.7KW21:230V单相004:0.4KW015:1.5KW23:230V三相022:2.2KW43:460V三相ST系列M系列社外密三、系统配线图:DLSTB1-22WDTDO CN5DC 1DFO 2DFC 3T 4A 5B PWR6P MY2N CN6DC24V4A3B 2B1A CN9121344/DT 5CN4INS81DFO 92变频器DT 123门控基板RUN 62X 4DFC 62X1PWR2PWR3121928354EM5S3A 6R312GND 7P24C +12V 8E GDS 9NC2DCC 10P24A DT11CN818DS 12HL 24GND+24V 6F 5(62P) RESET通讯123TB1-264TB1-32通讯TB1-28电源输入TB1-25R TB1-29S RESET (62A)E 马达输出U V W 321CN21CNK14-92DERR 34567NC2CN4MO1GNDM5M4M3B M1G M0脉波产生器MCM TB1-23MO2TB1-24COMCNK14-7S3CNK14-3S2TB1-7S1TB1-8R TB1-32CN7变频器过转矩变频器故障GND*信号说明:DCC:门安全信号PBA:门机位置误差过大DT:开门信号T:串列传输异常GDS:门全关信号DCF:门全关信号检知18DS:门全开信号DFO:门全开信号检知DERR:门故障信号DC:关门信号输出DREST:门重置信号DO:开门信号输出ERR1:变频器故障输出WDT:重置ERR2:过转矩动作ERR3:门控基板参数异常*主回路配线:R、S 不必考虑相序关系,当门控基板下达开门指令DO 灯亮时,电梯应开门,若U、V、W 任意两线对调即可。
*PG 配线:电梯开门时,PG 计数递加,若递减将A、B 相对调。
社外密陆、门控基板设定说明:1、速度数值设定:(数值输入为十六进位)(a)开门相关数值设定(1)开门初速设定:数控器主画面(2)开门初速爬行距离设定:数控器主画面(3)开门减速距离设定:数控器主画面(4)开门速度设定:数控器主画面(5)开门爬行速度设定:数控器主画面按‘2’按‘2’按▼或▲至按‘2’按▼或▲至按‘2’按▼或▲至按‘2’按▼或▲至Open StartSpeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Open StartCreepR:0000h S:0000hMonitor=0Posi=1SetUp=2Next=3Open DecDistanceR:0000h S:0000hOpen StartspeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Open StartspeedR:0000h S:000.00Open SpeedR:0000h S:000.00Open CreepSpeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Open StartSpeedR:0000h S:000.00社外密(6)开门爬行距离设定:数控器按‘2’按▼或▲至主画面(7)门全开Hold速度设定:数控器按‘2’按▼或▲至主画面(b)关门相关数值设定:(1)关门初速设定:数控器按‘2’按▼或▲至主画面(2)关门初速爬行距离设定:数控器按‘2’按▼或▲至主画面(3)关门减速距离设定:数控器按‘2’按▼或▲至主画面Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Open CreepDisR:0000h S:0000hMonitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Open HoldSpeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Close DecDistanceR:0000h S:0000hClose StartCreepR:0000h S:0000hClose StartspeedR:0000h S:000.00社外密(4)关门速度设定:数控器按‘2’按▼或▲至主画面(5)关门爬行速度设定:数控器按‘2’按▼或▲至主画面(6)关门爬行距离设定:数控器按‘2’按▼或▲至主画面(7)门全关Hold速度设定:数控器按‘2’按▼或▲至主画面Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00CloseSpeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Close CreepSpeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Close CreepDisR:0000h S:0000hMonitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Close HoldSpeedR:0000h S:000.00社外密2.PI Gain数值设定:(数值输入为十六进位)(1)开门P Gain设定:数控器按‘2’按▼或▲至主画面(2)关门P Gain设定:数控器按‘2’按▼或▲至主画面(3)开门I Gain设定:数控器按‘2’按▼或▲至主画面(4)关门I Gain设定:数控器按‘2’按▼或▲至主画面Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Open P Gain SetR:00h S:00hMonitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Close P Gain SetR:00h S:00hMonitor=0Posi=1SetUp=2Next=3Open I Gain SetR:00h S:00hOpen StartspeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Close I Gain SetR:00h S:00h社外密3.保护类参数设定:(1)过转矩误差设定:门变频器发生过转矩时,若目前位置大于(门全开位置+过转矩位置误差值)或目前位置小于位置-过转矩位置误差值)时,则以慢速运作Reopen,否则以正常速度作Reopen。
数控器按‘2’按▼或▲至主画面(2)关门过转矩准位设定:(数值输入位十进位)若关门电流大于(变频器额定输出电流X设定值%)则门机REOPEN的接点会动作。
数控器按‘2’按▼或▲至主画面(3)开门过转矩准位设定:(数值输入位十进位)若开门电流大于(变频器额定输出电流X设定值%)则门机REOPEN的接点会动作。
数控器按‘2’按▼或▲至主画面(4)过转矩动作接点触发方式设定(数值只可输入“A”或”B”)过转矩动作Reopen的接点触发方式可选择A接点或B接点(依据电梯安全触板信号D点或B接点设定)A接点安全触板B接点安全触板过转矩接点过转矩接点(2)脉波产生器选择数控器按‘2’按▼或▲至Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Over Torque SlowR:0000h S:0000hMonitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Close Torque LevelR:000%S:000%Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Open Torque LevelR:000%S:000%社外密主画面(3)开门最大速度设定。
数控器按‘2’按▼或▲至主画面(4)关门最大速度设定。
数控器按‘2’按▼或▲至主画面Encode(1:256)R:02S:02(2:500)Monitor=0Posi=1SetUp=2Next=3Open StartspeedR:0000h S:000.00Monitor=0Posi=1SetUp=2Next=3Max Close SpeedR:0000h S:000.00Max Open SpeedR:0000h S:000.00Open StartspeedR:0000h S:000.00社外密数控器按‘2’按▼或▲至主画面(5)开门最大I Gain值设定:数控器按‘2’按▼或▲至主画面(6)关门最大I Gain值设定:数控器按‘2’按▼或▲至主画面(7)位置误差过大设定:若目前位置大于(门全开位置+位置误差值)或目前位置小于(门全关位置儿-位置误差值)出故障。
数控器按‘2’按▼或▲至主画面4.门全关位置及门全开位置设定:(数值输入为十六进位)(1)门全关位置设定:若GDS动作,则以门全关位置重新更新位置。
数控器按‘1’按▼或▲至主画面(2)门全开位置设定:若18DS动作,则以门全开位置重新更新位置。