机车自动过分相 (2)
自动过分相对电力机车的影响

自动过分相对电力机车的影响摘要:对机车牵引变压器、整流器牵引电机系统、辅助电机系统在自动过电分相时的过渡过程进行了分析,指出了产生过电压和过电流的原因。
关键词:电力机车;过电分相;过电压;过电流电气化铁道电网采用单相供电,而电力系统则是三相供电系统。
为了使电气化铁道从电力系统三相电网取流基本对称,电气化铁道采用了分相分段取流的方法,即每隔20km~25 km设置一个分相段,相邻分相段由不相同的两相供电,相邻分相区有30 m左右的供电死区,这样就存在电力机车如何通过分相区的问题。
目前我国绝大部分线路采用的是司机手动过分相,即机车行至分相区时,司机先解除牵引力、关辅助机组、断主断路器,惰行通过分相区后,再逐项恢复。
这种方法不仅司机劳动强度大,而且通过无电区时间长,机车速度下降多,司机稍不留神,就会带电通过分相区,造成相间短路。
司机手动过电分相方法不满足现代铁道重载和高速发展的需要,自动过电分相转换装置的研究显得十分紧迫。
1 残压生成及其危害在自动过电分相中,当 1ZK 断开,2ZK 合上之前,测得机车主变压器一次侧电压高达 11 kV ~ 12 kV,我们称其为残压。
机车轻载时,残压更高,可接近 A 相电网电压。
残压生成是因为 SS 1 机车辅机系统采用了旋转劈相机供电。
在 1ZK 断开后,变压器辅助绕组和辅助电路异步机群之间仍构成闭合回路,其中有些电机处于发电状态,有的处于电动状态 [1 ],辅机系统可等效于一个电源,辅助绕组上的电压耦合到主变压器的一次侧,就表现为残压(注:异步机群发电与人们通常认为的异步电机自励发电需要电容的理论是有差别的)。
残压衰减速度与机车的所处级位有关,级位越高衰减越快。
因为断电时间很短,仅有 130 m s 左右,2ZK 合上时残压仍保持很高的幅值。
笔者在试验室进行多次模拟试验中证明了这一点。
对相控机车或交直交机车,如在无电网供电时封锁整流器触发信号,能量仅在辅机系统内部衰减,衰减速度慢,残压将会一直接近于 A 相电压。
自动过分相操纵要求(机务段)
昆明机务段通知技术科[2015]39号起草:潘勇审核:王文俊批准:方伟关于玉溪南至河口北机车自动过分相操作注意事项段属各相关部门:目前,我段玉溪南至河口北运用的SS3型及SS3B型具有自动过分相装臵,为更好的使用该装臵,现将操纵注意事项及应急故障处臵明确如下,请涉及部门认真宣传、学习。
一、操纵注意事项1.正常过分相时不做任何操作。
加装车载兼容设备的电力机车通过安装有地面控制自动过分相系统的分相区时,不做任何操作通过分相,但必须密切注意辅机工作情况,发现异常时及时断开劈相机扳钮重新启动。
2.两种情况必须断电降弓过分相。
第3位及以后机车(第3位机车升弓可能短路接触网两相电源);尾部升弓合闸机车(地面设备无法识别该机车)。
3.三种情况必须断电过分相。
接到车站地面控制自动过分相设备故障时;看见电动“断”标时(电动“断”标与线路垂直);发生无流无压故障将低压柜内控制器切除开关臵切除位时。
4.SS3B型机车单节运行处臵。
SS3B型机车发生机车故障需切除一节机车时,必将全车过分相控制器开关臵切除位,否则会导致机车无流无压。
5.其它注意事项。
过分相发生原边过流、辅过流、窜车跳主断时重新合闸加载并立即对辅机进行检查;断电过分相时在电动“断”标处断电;HXD3系列电力机车未加装车载兼容设备的电力机车(低压柜无控制器)及未安装有地面控制自动过分相系统的分相(地面有断电标)执行原要求人工断电过分相。
二、应急故障处理1.控制器位臵及切除开关操作方法。
SS3型机车自动过分相装臵控制器安装在Ⅰ端低压柜中部,SS3B型机车自动过分相装臵控制器均安装于A、B节Ⅰ端低压柜中部。
自动过分相装臵投入工作时如图1所示,自动过分相装臵切除时如图2所示。
2.自动过分相装臵故障现象及处臵方法。
自动过分相装臵切除作业时,SS3型机车将Ⅰ端低压柜内控制器开关臵“切除”位。
SS3B 机车需要同时将A 、B 节Ⅰ端低压柜内控制器开关臵“切除”位。
故障现象及处理方法如下表所示:“自动过分相装置”投入工作切除“自动过分相装置”昆明机务段2015年5月14日。
HXD3型电力机车司机考试知识答案

HXD3型电力机车司机考试知识答案1.简述HXD3型电力机车辅助系统的作用。
答案:HXD3型电力机车辅助系统是机车的重要组成部分,包括通风、冷却系统、压缩机及空调等(2分),其作用是为机车牵引及制动系统提供保障的,而机车辅助变流系统又是为机车辅助系统提供三相交流电源的(2分)。
因此辅助变流系统的好坏,直接关系到机车能否正常运行。
(1分)2.简述CCBⅡ制动机自动制动阀运转位时的作用。
答案:ERCP响应手柄位置,给均衡风缸充风到设定值(1分);BPCP 响应均衡风缸压力变化,列车管被充风到均衡风缸设定压力(1分);16CP响应列车管压力变化,将作用管(16#管)压力排放(1分);BCCP 响应作用管压力变化,机车制动缸缓解(1分);同时车辆副风缸充风,车辆制动机缓解(1分)。
3.HXD3型电力机车在冷却系统中设定哪四种监视和保护?答案:HXD3型电力机车在冷却系统中,设定了如下四种监视和保护(1分):(1)通过流量计监测冷却水的流速,实现牵引变流器进口水压监测和失压保护(1分);(2)通过监测水-空气热交换器风速,实现牵引变流器水冷却的保护(1分);(3)通过热敏电阻温度继电器对元件的监测,实现牵引变流器进出口水温的监视和保护(1分);(4)通过水位计,对储水箱的水位进行监视和低于最低许用水位的保护(1分)。
4.简述CCBⅡ制动机自动制动阀抑制位时的作用。
答案:机车产生常用惩罚制动后,必须将手柄放置此位置使制动机复位后,手柄再放置运转位,机车制动作用才可缓解(3分)。
在抑制位,机车将产生常用全制动作用(2分)。
5.简述HXD3型电力机车原边网侧电路的组成。
答案:HXD3型电力机车原边网侧电路由一台受电弓AP1、AP2、(0.5分)两台高压隔离开关QS1、QS2、(0.5分)一个高压电流互感器TA1、(0.5分)1个高压电压互感器TV1、(0.5分)一台主断路器QF1、(0.5分)一台高压接地开关QS10、(0.5分)一台避雷器F1、(0.5分)主变压器原边绕组AX、(0.5分)一个低压电流互感器TA2(0.5分)和回流装置EB1~6等组成(0.5分)。
和谐电力机车150题库
和谐电力机车150题库HXD型电力机车题库(150题)一、填空题(30)1.和谐型电力机车传动方式为()。
答案:交-直-交2.为了防止司机可能产生的误操作,司控器调速手柄与换向手柄之间设有()装置。
答案:机械联锁。
3. 主电路主要由()、主变压器、主变流器及牵引电动机等电路组成。
答案:网侧4. 和谐型电力机车动力制动方式为( )。
答案:再生制动5. 和谐型电力机车的电气线路主要由主电路、( )、控制电路,行车安全综合信息监控系统电路和空气管路系统电路组成。
答案:辅助电路6. 和谐型电力型机车采用IGBT()变流机组。
答案:水冷7. 和谐型电力机车总体设计采用高度集成化、( )的设计思路。
答案:模块化8.制动显示屏LCDM位于司机室操纵台,通过它可进行CCBⅡ系统()、故障查询等功能的选择和应用。
答案:自检9.自动制动手柄位置包括运转位、初制动、全制动、( )、重联位、紧急位。
答案:抑制位10.和谐型电力机车自阀制动后需单独缓解机车时,单阀应在运转位向( )侧压。
答案:右11.ERCP发生故障时,自动由()和13CP来代替其功能。
12. 和谐型电力机车变压器具有高阻抗、重量轻等特点,并采用强迫导向油循环()技术。
答案:风冷13. 和谐型电力机车牵引变流器冷却系统,通过流量计监测冷却水的流速,实现牵引变流器进口( )监测和保护。
答案:水压14. 和谐型电力机车受电弓内装有( )装置,当弓网故障时,可自动降弓保护。
答案:自动降弓15. 和谐型电力机车通过设置高压接地开关,来实现机车的高压安全( )。
答案:互锁16. 和谐型电力机车正常运行时,辅助变流器l工作在VVVF方式,辅助变流器2工作在()方式,分别为机车辅助电动机供电。
答案:CVCF17. 检查机车时不允许( )制动盘任何部位。
答案:敲打18. 和谐型电力机车主变流器采用()冷却方式。
答案:水19.自阀手把运转位时,16CP响应( )压力变化,将作用管压力排放。
和谐电3型专业知识答案
和谐电3型专业知识参考答案一、填空题1、C0-C02、72003、机械联锁4、340~3805、两6、657、5708、65~1209、再生制动10、网侧11、CI12、主断13、自检14、常用15、右16、停止17、1 18、16CP 19、水冷20、模块化21、框架22、交直交23、120 24、失压25、受电弓26、三27、半悬挂28、推挽式29、多绕组30、风冷31、集成化32、车内33、隔离位34、瞬时过电压35、辅助滤波36、TCMS 37、列车管38、作用管39、辅助电路40、自动降弓41、电空42、互锁43、两44、黄45、CVCF 46、弹性胶泥缓冲器47、5 48、半49、轮盘50、六51、5 52、60 53、不允许54、紧急55、CVCF 56、强迫57、独立58、触摸开关59、接触网60、2000 61、2800 62、10 63、16 64、电磁接触器65、CVCF 66、短路67、三68、断开69、禁止70、20CP 71、13CP 72、不73、操纵74、110 75、31.5 76、逻辑控制77、四78、15 79、1 80、TCMS 81、水冷82、压缩空气83、感应84、0—300 85、全制动86、自动87、主变压器88、接地89、制动缸90、空气压缩机91、750~900 92、825 93、470 94、100 95、CCBⅡ96、EBV 97、QA56 98、480 99、735 100、10 101、30 102、故障信息103、主变流器104、三相105、B40.06 106、牵引变流器107、轴控108、不补风109、主变流器单元110、主变流器单元111、手动112、50二、判断题1、×2、√3、√4、√5、√6、√7、×8、√9、√10、×11、×12、√13、×14、√15、×16、√17、√18、×19、×20、×21、×22、×23、√24、×25、√26、√27、×28、√29、×30、×31、√32、×33、√34、√35、×36、√37、√38、×39、√40、√41、×42、√43、×44、×45、√46、×47、×48、√49、√50、×51、×52、√53、×54、√55、×56、√57、×58、√59、×60、√61、√62、×63、√64、×65、√66、×67、×68、√69、√70、√71、√72、×73、×74、√75、×76、×77、√78、√79、√80、√81、√82、×83、√84、√85、√86、×87、√88、√89、√90、×91、×92、√93、×94、√95、√96、√97、×98、√99、×100、√101、×102、√103、×104、√105、×106、√107、√108、√109、×110、×111、×112、×三、选择题1、C2、C3、B4、B5、B6、B7、B8、A9、B 10、A 11、C 12、B 13、A 14、B 15、C 16、A 17、B 18、A 19、A20、B 21、C 22、B 23、A 24、B 25、A 26、A 27、C 28、A 29、B 30、A 31、C 32、C 33、A 34、C 35、B 36、A 37、B 38、C 39、A 40、C 41、A 42、A 43、C 44、B 45、A46、C 47、A 48、B 49、B 50、A 51、A 52、B 53、C 54、A 55、B 56、C 57、B 58、A 59、C 60、B 61、A62、C 63、B 64、B 65、A 66、B 67、C 68、C 69、B70、B 71、B 72、C 73、B 74、A 75、B 76、C 77、B 78、C 79、A 80、C 81、A 82、B 83、A 84、A 85、A 86、B 87、C 88、A 89、B 90、C 91、A 92、B 93、B 94、A 95、B 96、B 97、A 98、A 99、C 100、B 101、C 102、B 103、A 104、B 105、A 106、B 107、A 108、A 109、B 110、B 111、C 112、A四、简答题1、简述HXD3型电力机车辅助系统的作用。
浅析城际动车组自动过分相原理及典型故障分析处理

浅析城际动车组自动过分相原理及典型故障分析处理摘要:本文介绍某项目160km/h城际动车组自动过分相的工作原理,通过典型故障分析处理,为排查过分相失败故障提供思路及方法。
关键词:自动过分相;工作原理;典型故障分析处理;引言:随着动车组速度的不断提高,动车组在一个分相区内的运行时间减少,如再采用传统的手动过分相区的方法,司机每隔十几分钟就需要进行一遍复杂的过分相操作(如:手柄退级、关闭辅助机组、断开主断路器,通过分相区后又要合主断路器、开启辅助机组、手柄进级)。
这样不仅增加了司机的劳动强度,而且也大大增加了出现误操作造成事故的概率,对动车组运行速度也有较大影响。
因此,必须采用不需要人为操作的自动过分相控制系统。
动车组长距离行驶过程中,接触网供电会来自不同的变电所。
两变电所接触网供电交接处会有一段无电区。
自动过分相能够保证动车组安全惰行通过无电区,而无需进行升降弓。
一、自动过分相系统简介某城际动车组磁感应自动过分相采用XGZ-C型自动过分相控制系统。
该系统主要由地面铺设的磁钢以及动车组上安装的车载感应器、主机、硬线电路组成。
其主要功能是当车辆通过分相区时,通过磁感应器感应轨道两侧地面磁信号获取分相区区位置后系统发出相应的控制信号,使机车控制系统根据当时机车速度、位置,自动平滑降牵引电流、断辅助机组和分断主断路器。
通过分相区后,自动闭合主断路器、闭合辅助机组和控制牵引电流平滑上升,从而实现动车组通过分相区时的自动化操作,大大减轻司机的工作强度。
某城际动车组过分相示意图如图1所示图1某城际动车组自动过分相示意图二、动车组磁感应过分相工作原理动车组通过地面感应定位信号确定动车组与分相点的相对位置。
地面定位和动车组感应信号分别采用斜对称埋设和备份方式接收。
预先根据要求在每个分相区前后方分别埋设2个地感器,前方轨道右侧为G1,左侧为G2;后方轨道右侧为G3,左侧为G4。
如图2所示。
图2地感器示意图根据图3所示过分相电气原理图分析,当动车组I端向前工况且沿图2箭头方向运行至G1地感器时,T2收到地面感应信号,经过分相主机内部PLC模块处理后输出DC110V 1s预告信号给动车组,动车组卸载并分主断;动车组运行至G2地感器时,T1收到地面感应信号,经过分相主机内部PLC模块处理后通过=21-A202-X1:14点输出输出DC110V 1s,E22_01过分相强迫信号给动车组,动车组立即断主断;此时过分相指示灯=21-S103亮,HMI并给司机信息提示自动过分相进入,动车组惰性通过分相区到达G3地感器时,T2再次收到地面感应信号,经分相主机内部PLC模块处理后通过=21-A202-X1:13输出DC110V 1s,E22_00过分相预告/恢复信号给动车组,动车组恢复工况到G1状况主断自动闭合,此时过分相指示灯=21-S103灭,HMI并给司机信息提示自动过分相通过,动车组运行至G4地感器时,T1再次收到地面感应信号,若此时恢复信号已发,则不对动车组输出恢复信号,若G3接收失效,则发送恢复信号给动车组。
关于电力机车过分相问题的探讨

关于电力机车过分相问题的探讨0引言为使电力系统三相负荷尽可能平衡,电气化铁道的接触网采用分段换相供电。
为防止相间短路,在不同相供电臂之间的连接处用绝缘装置分割,形成了二个供电臂之间绝缘分割区域,称为分相区。
电力机车在进入分相区前,通过人控(司机操作)或机控(设备控制)2种方法,切断机车用电负载,使电力机车受电弓在无电流情况下滑行通过分相区后,再恢复机车用电负载。
上述人控和机控的2种过分相操作方法,由于受操作者可能存在的失误和设备故障失控,带电过分相的现象还难以杜绝,而一旦发生,轻则受电弓、分相装置受损,严重时造成接触网烧损,中断铁路运输,给电气化铁路行车安全构成严重威胁。
因此,研究和完善过分相的设备改进方案,强化配套的管理工作,提升电力机车过分相的可靠性成为十分重要的课题。
1过分相装置原理简述目前国内外研究和采用的自动过分相装置,技术方案有3种:即地面开关自动切换方案,柱上开关自动断电方案,车上自动控制断电方案。
1)地面开关自动切换方案日本新干线采用地面开关自动切换过分相方案。
在接触网分相处设置一个中性区段,两端分别由绝缘器F1、F2与二相接触网绝缘,一般采用锚段关节结构,以保证受电弓滑过时能连续受流。
2台真空断路器S1、S2分别跨接在接触网两相上并能通过它们向中性区段供电,在无机车通过时,S1闭合、S2断开。
钢轨两侧设置4个机车位置感应器CG1~CG4(或利用轨道电路实现位置检测),当机车驶入CG1点时,机车自然由A相供电;当机车驶入CG2点,但还未到CG3点时,控制电路使断路器S1断开,S2闭合,此时中性段由B相供电;当机车驶出CG4点时,控制电路使S1闭合,S2断开,恢复到没机车时的状态。
机车反向通过分相区时CG1~CG4发出相反顺序动作。
工程实施要考虑设备在线检修备份等因素并设置分区所,实际方案较以上复杂得多。
这种过分相方案断电时间约0.1~0.15s,其优点是:接触网无供电死区,无需司机操作,车上主断路器无须动作,自动换向时接触网中性段瞬间断电时间短,可适用于不同机车速度;缺点是:过分相后合闸的电流冲击较大,建造和运行维护费用很高。
自动过分相原理
第二节 工作原理本系统是基于免维护地面定位技术的车载自动过分相控制系统。
机车通过感应地面定位信号确定机车与分相点的相对位置,地面定位和机车感应信号分别采用斜对称埋设和备份接收,以保证自动过分相的安全和可靠。
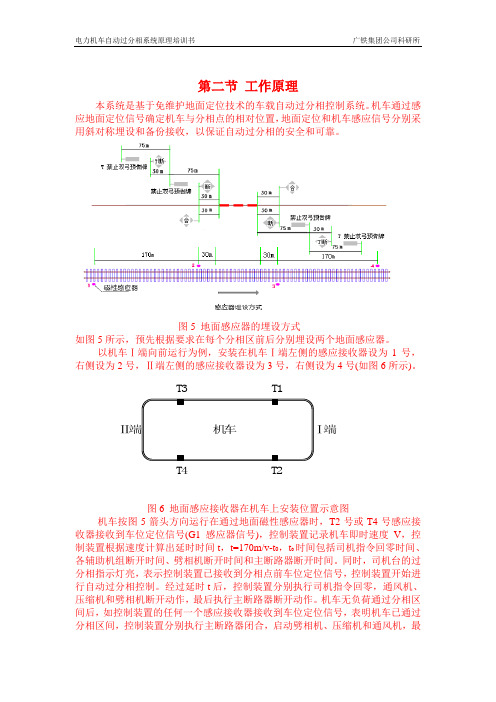
图5 地面感应器的埋设方式如图5所示,预先根据要求在每个分相区前后分别埋设两个地面感应器。
以机车Ⅰ端向前运行为例,安装在机车Ⅰ端左侧的感应接收器设为1号,右侧设为2号,Ⅱ端左侧的感应接收器设为3号,右侧设为4号(如图6所示)。
图6 地面感应接收器在机车上安装位置示意图机车按图5箭头方向运行在通过地面磁性感应器时,T2号或T4号感应接收器接收到车位定位信号(G1感应器信号),控制装置记录机车即时速度V ,控制装置根据速度计算出延时时间t ,t=170m/v-t 0,t 0时间包括司机指令回零时间、各辅助机组断开时间、劈相机断开时间和主断路器断开时间。
同时,司机台的过分相指示灯亮,表示控制装置已接收到分相点前车位定位信号,控制装置开始进行自动过分相控制。
经过延时t 后,控制装置分别执行司机指令回零,通风机、压缩机和劈相机断开动作,最后执行主断路器断开动作。
机车无负荷通过分相区间后,如控制装置的任何一个感应接收器接收到车位定位信号,表明机车已通过分相区间,控制装置分别执行主断路器闭合,启动劈相机、压缩机和通风机,最 T3 T1Ⅱ端端T4 T2后恢复司机指令。
机车恢复原有状态。
司机台的过分相指示灯熄灭,表明控制装置已完成自动过分相控制。
在某些特殊情况下,如:地面感应器丢失、感应接收器故障或信号线断等原因。
控制装置的T2号或T4号感应接收器接收不到车位定位信号。
控制装置的T1号或T3号感应接收器接收到车位定位信号(G2感应器信号),司机台的指示信号灯亮,表示控制装置已接收到车位定位信号,控制装置立即执行司机指令回零,通风机、压缩机、劈相机和主断路器断开动作。
2.1感应接收器自动过分相的关键技术是定位,定位是否准确是系统准确性和可靠性的关键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2、1 系统组成
系统由感应接受器(简称车感器)、自动过分相信号处理器与信号指示三部分组成,系统结构如下图1
图1 车载自动过分相系统结构图2、2 系统外观
图2 自动过分相信号处理器安装图1. 2端
司机台
正常指示灯
过分相报警蜂鸣器
Ⅰ端向前预告信号
车感信号处理装置强断信号微机柜
Ⅱ端向前
车感器跳“主断”
T1 T4 T2 T3 合“主断”机车控制回路
图3 车感器安装图
图4 信号指示安装图
三工作原理
本系统就是基于免维护地面定位技术的车载自动过分相控制系统。
机车通过感应地面定位信号确定机车与分相点的相对位置,地面定位与机车感应信号分别采用斜对称埋设与备份接收,以保证自动过分相的安全与可靠。
图5 地面感应器的埋设方式
如图5所示,预先根据要求在每个分相区前后分别埋设两个地面感应器。
机车过分相信号的感应、处理,由地面磁感应器、车感器与车感信号处理装置共同完成。
机车过分相的控制,由微机柜及机车控制回路完成。
微机柜对机车过分相的自动控制,与司机操作控制并联,当司机操作控制过分相,自动控制起监视作用。
机车运行至G1(G4)点,自动过分相信号处理器接收到感应接收器感应的预告地面定位信号,信号处理器向微机柜发出过分相预告信号,微机柜根据此时机车运行速度,控制电机电流平稳下降到0,发出断‘主断’信号给控制电路,控制电路控制机车断劈相机、断‘主断’(预告模式);同时,司机室蜂鸣器响3s,提醒司机过分相区。
当G1(G4)信号失效时,机车运行至G2(G3)点,自动过分相信号处理器接收到感应接收器感应的强迫地面定位信号,信号处理器向微机柜发出过分相强迫断信号,微机柜立即封锁电
机电流,发出断‘主断’信号给控制电路控制机车断劈相机、断‘主断’。
在正常接收到G1(G4)信号时G2(G3)信号不起作用(强迫断模式)。
机车通过无电区后,根据接收G3(G1)点,自动过分相信号处理器接收到感应接收器感应的合闸地面定位信号信号,则通过预告信号通道向微机柜送出合‘主断’信号,司机室蜂鸣器响3s,提醒司机已通过分相区。
微机柜发出合‘主断’给控制电路,控制电路控制机车合劈相机、合‘主断’。
预备好后,微机柜控制电机电流缓慢恢复到过分相前工况。
在正常接收G3(G1)信号时G4(2)信号不起作用。
3.1地面感应信号接收器
自动过分相的关键技术就是定位,定位就是否准确就是系统准确性与可靠性的关键。
地面感应信号安装在机车的转向架上,采用密封防水、防震设计处理,保证系统的可靠运行。
安装在机车转向架上的地面感应信号接收器通过地面感应器时,在地面感应信号接收器上感应一个幅值与宽度与机车运行速度相对应的信号。
地面感应接收器安装于机车下部转向架的两侧,共四个。
前后相互备份。
3.1.1 地面感应接收器
地面感应接收器基于电磁感应原理,感应接收线圈与地面感应器的磁场相结合,完成系统的定位识别。
具有识别准确高、相应时间短、抗干扰能力强、无故障运行时间长等优点。
3.1.2 地面感应器
地面感应器就是嵌入到轨枕里的永久磁铁,具有耐高温、耐腐蚀、不会损坏等特点,适合安装在室外。
地面感应器的安装见附件1。
3.2 控制系统
控制系统就是由系统信号处理单元以及控制单元组成。
系统信号处理器采集感应接收器接收的定位信号、机车运行方向、处理相应的信息、发出相关的信息指令、
自诊断故障信息、输出显示信息等功能。
系统控制单元则由机车的微机轨来实现,主要功能就是采集由系统信号处理器输出的定位信息、机车速度、司机指令、牵引电流、供电网压等相关机车信息,并根据接收到信号处理器输出的定位信息、机车运行速度,确定控制牵引电流下降的速率与确定断开主断路器的位置。
通过分相区后,根据接收到信号处理器输出的定位信息,控制闭合主断路器与控制牵引电流平稳上升。
信号处理器的面板示意图如图6所示。
信号处理器的背面示意图如图7所示。
信号处理器在通电、屏蔽接收信号结束或通过分相点后进行一次自检。
信号处理器在前进方向右侧两个感应接收器分别接收到预告感应器信号与反向强迫感应器信号,以及前进方向左侧两个感应接收器分别接收到强迫感应器信号与反向预告感应器信号,则屏蔽接收信号16S开始接收感应信号,否则屏蔽接收信号2分钟开始接收信号。
图6 信号处理器的面板示意图
•正常指示灯:信号处理器进行自检,当检测到有一路感应接收回路有故障时,正常指示灯闪亮。
当检测到所有感应接收回路有故障时,正常灯灭。
信号处理器正常工作指示灯亮。
•工作指示灯:信号处理器工作时,工作指示灯亮。
信号处理器不能正常工作,则工作指示灯灭。
•试验按钮:可用于试验自动过分相系统工作就是否正常。
在Ⅰ端司机室的手柄放在“前”位,按动试验按钮,可模拟自动过分相强迫断。
等2分钟后或断合一次信号处理器的电源开关。
在Ⅰ端司机室的手柄放在“后”位,按动试验按钮,可模拟自动过分相预告断。
自动过分相预告断在机车静止状态时,要等30s后断主断路器。
•电源开关: 信号处理器的电源开关。
信号处理器故障时可以关闭电源。
•T1指示灯:车感器信号1指示,接收到感应信号时闪亮。
•T2指示灯:车感器信号2指示,接收到感应信号时闪亮。
•T3指示灯:车感器信号3指示,接收到感应信号时闪亮。
•T4指示灯:车感器信号4指示,接收到感应信号时闪亮。
•前指示灯:机车向前信号输入到信号处理器时,指示灯亮。
•后指示灯:机车向后信号输入到信号处理器时,指示灯亮。
•预告/恢复指示灯:信号处理器输出预告信号与恢复信号时,指示灯亮。
•强迫指示灯:信号处理器输出强迫信号时,指示灯亮。
•重联指示灯:机车选择恢复点信号输入到信号处理器时,指示灯亮。
图7 信号处理器的背面示意图
说明:
外接插头:X2、X3、X4与X5信号处理器与感应接收器外接插头,X1与微机柜、机车控制电路与110V电源的连接插头外接插头。
3.3灯显指示
灯显指示的主要功能就是显示整个系统运行的状况。
当系统接收到信号时能及时、准确的发出灯光及蜂鸣声以提醒司机。
在机车的Ⅰ、Ⅱ端司机室的操纵台上安装一个工作指示灯,一个接收到预告信号指示的蜂鸣器。
蜂鸣器用于指示接收到预告信号的状况,当机车通过埋设在地面的预告感应器时,感应接收器接收到地面信号。
信号处理器接收到感应接收器接收的信号,向微机柜发出过分相区的预告信号。
同时,通过蜂鸣器向司机发出自动过分相已经工作。
如机车通过“禁止双弓”标牌时,蜂鸣器没有响,可以采用手动过分相。
四主要性能指标
4.1使用环境
☞海拔高度不超过2500m;
☞最高周围空气温度为40℃,允许在40℃存放;
☞最低周围空气温度为-40℃,允许在-40℃存放;
☞周围空气湿度:最湿月份平均最大相当湿度不大于95%(该月月平均最低温度为25℃);
☞相对于机车垂向、横向、纵向存在着频率f为1~50Hz时等于1g;
☞因机车连挂时冲击,沿机车纵向激起的加速度不大于3g;
☞信号处理器安装在能防止风、沙、雨、雪直接侵袭的车体内。
4.2额定参数
☞型号:GFX3S型自动过分相装置
☞工作电压:DC77V~137V;
功耗:6W;
☞绝缘电阻:≥500ΜΩ;
☞工作温度:-25℃~70℃;
☞适用速度范围 10~300km/h;
☞感应接收器直流电阻:620Ω±5%;
4.3技术要求
车载自动过分相装置信号处理器的元件满足TB/T3021-2001《铁道机车车辆电子装置》标准的规定;
4.4 工作性能
左边地感器信号输出(强迫信号) 110V、脉宽1s±10%
右边地感器信号输出(预告信号) 110V、脉宽3s±10%
恢复信号(从预告信号通道输出) 110V、脉宽3s±10% 接收相应时间≤0、05s±10%
五外形尺寸与感应接收器安装要求
车载自动过分相信号处理器外形及安装尺寸如图8:
图 8
感应接收器的外形、安装尺寸与连线插头插座定义如下图9:
图9
车载自动过分相装置的感应接收器安装如图10(距钢轨内侧335mm-10mm,距钢
轨踏面110mm+20mm)。
图10
六系统对外连接图
6.1 20芯插座X1的定义(信号可根据机车控制系统的要求进行选择)
6.2 3芯插座X2的定义
6.3 3芯插座X3的定义
6.4 3芯插座X4的定义
6.5 3芯插座X5的定义
七系统电路原理图
八售后服务
售后服务
整个系统在安装调试过程中,我所将派1~2名技术人员现场指导装车。
正常运用后,保证期为18个月,我所将提供一定量的备品用于保质期的更换与现场维护;保质期期满后,我所将对该系统有效使用期内进行维护。
合同保质期内,用户的服务需求,均做到积极到位协助工作;积极协查与处理故障;配件维修保持七日返回,收发货情况及时通报用户。
合同保质期外,提供有效使用期的技术支持服务,并进行定期的质量回访,协助有效使用期内维修与技术升级改造。