汽车电动助力转向系统_图文.ppt
合集下载
汽车电动转向EPS课件
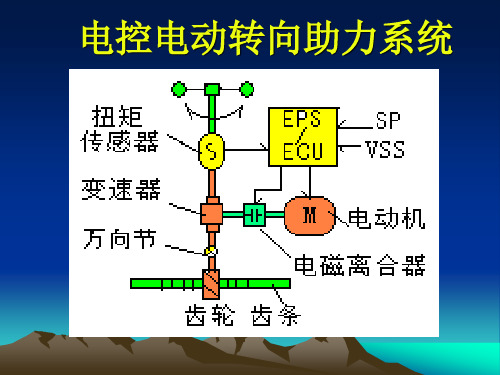
3、由于不需要加注液压油和安装液 压油管,所以系统的安装简便,自 由度大,而且成本低,无漏油故障 的发生,它比电控电动转向助力系统EPS组成: 电控电动转向助力系统EPS,由:装在 转向器输入端的扭矩传感器、电磁离合 器、电动机及变速器(减速机构)、电 脑(EPS/ECU)等元件组成。
0.2L。 2、系统中无液压油,无漏油故障。 3、电脑控制转向,有主动回正功能,直 行能力好。 4、电控助力系统损坏时,仍能机 械转向。 5、加装了转角传感器,给电脑提供转 角大小和快慢信号,提高了转向控制功能。
END!
(三)磁阻式扭矩传感器 (奥迪): 输入轴上装有多极磁环, 输出轴上装有磁阻元件MRE, 两者用扭力杆弹性连接,可 相对角位移。转向时扭力杆 变形,多极磁环旋转,引起 磁通的变化,使磁阻元件的 阻值发生变化,因而输出电 压发生变化,它就是转向助 力的度量值,此信号输出给 电脑EPS/ECU。
六、EPS系统的电路原理图: 1、EPS转向助力系统由:EPS/ECU、 转矩传感器、控制电动机和离合器、 EPS故障指示灯、故障自诊断接口等组 成,它和电喷系统的ECU联网工作。
当转向盘转动时,因转向阻力的存在, 扭杆变形,两个光电元件之间的光电 信号值即出现差值,此差值即为转向 助力的度量值。转向力矩越大,扭杆 变形越大,差值角度就越大。此扭矩 和方向信号传送给ECU。
ECU再根据车速传感器信号以及车辆 状态信号(静态或动态),经过编程 处理,通过助力电动机,提供转向助 力量化控制。
3、直流电动机及减速机构—直流电动机的特点 是:转矩大、调速范围宽,改变驱动电流的大小, 即可使其转速突变,在适当的时候提供转向助力 转矩。电动机分:直流有刷永磁电动机和直流无 刷永磁电动机,前者可靠性差,但控制程序简单; 后者可靠性高,但其控制程序复杂。
EPS (电子助力转向) PPT

[分相器单元1 输出信号]
[分相器单元2 输出信号]
t
t
t
t
转向
扭矩传感器 (分相器型) – EPS ECU根据两个分相器单元的相对位置决定对EPS马达提供
多少电压
1
1 - 2
EPS ECU
2
转向马
达电压
转向
马达 (无电刷) – 马达与齿条轴共轴, 由转角传感器、定子及转子组成
转角传感器
线圈 定子
2. 在20秒内断开、接通Tc端子 20次
CG
3. 确认电子助力转向警告灯显示
Ts
Tc
P/S (警告灯)
4. 将点火开关转为OFF
维修要点 (转向)
初始化及设定
– 使用SST (09083-18040) 2. 马达转角传感器设定
1.连接Ts and CG端子,并将点火开关转 为ON
2. 方向盘左右两个方向转动45度以上
初始化及设定Biblioteka – 使用IT-II10
维修要点 (转向)
初始化及设定
– 使用IT-II
10
维修要点 (转向)
初始化及设定
– 使用IT-II
维修要点 (转向)
初始化及设定
– 使用IT-II
维修要点 (转向)
初始化及设定
– 使用IT-II
10
维修要点 (转向)
初始化及设定
– 使用IT-II
EPS (电子助力转向)
转向
系统示意图
发动机 ECU (ECM)
制动控制 ECU
J/C No. 1
CAN
扭矩传感 器
DLC3
VGRS ECU
BEAN (仪表总线)
电控助力转向系统ppt课件

篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
2024/8/8
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
2024/8/8
❖4、电控液压式动力转向类型的种类 有
❖(1)可变量孔式液压动力转向 ❖(2)旁通式液压动力转向 ❖(3)反力式液压动力转向 ❖(4)电磁式液压动力转向 ❖(5)电动式液压动力转向
2024/8/8
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
❖也就是说,在低速行驶或转急弯 时得以很小的转向手力进行操作, 以获得较轻的转向;而在高速行 驶时,得以稍重的转向手力进行 稳定的操作,以避免转向“发 飘”,使转向的操纵性和稳定性 达到最合适的平衡状态。
2024/8/8
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
2024/8/8
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
第三节:电控动力式动力转向系统
❖一、特点
电动助力转向系统由电动机直接提供 转向助力,省去了液压动力转向系统 所必需的动力转向油泵、软管、液压 油、传送带和装于发动机上的皮带轮, 既节省能量,又保护了环境。另外, 还具有调整简单、装配灵活以及在多 种状况下都能提供转向助力的特点。
4、EPS路感好。
❖ 传统纯液压动力转向系大多采用固定 放大倍数,工作驱动力大,但却不能 实现汽车在各种车速下驾驶时的轻便 性和路感。而EPS系统的滞后特性可 以通过EPS控制器的软件加以补偿, 使汽车在各种速度下都能得到满意的 转向助力。
2024/8/8
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
2024/8/8
❖4、电控液压式动力转向类型的种类 有
❖(1)可变量孔式液压动力转向 ❖(2)旁通式液压动力转向 ❖(3)反力式液压动力转向 ❖(4)电磁式液压动力转向 ❖(5)电动式液压动力转向
2024/8/8
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
❖也就是说,在低速行驶或转急弯 时得以很小的转向手力进行操作, 以获得较轻的转向;而在高速行 驶时,得以稍重的转向手力进行 稳定的操作,以避免转向“发 飘”,使转向的操纵性和稳定性 达到最合适的平衡状态。
2024/8/8
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
2024/8/8
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
第三节:电控动力式动力转向系统
❖一、特点
电动助力转向系统由电动机直接提供 转向助力,省去了液压动力转向系统 所必需的动力转向油泵、软管、液压 油、传送带和装于发动机上的皮带轮, 既节省能量,又保护了环境。另外, 还具有调整简单、装配灵活以及在多 种状况下都能提供转向助力的特点。
4、EPS路感好。
❖ 传统纯液压动力转向系大多采用固定 放大倍数,工作驱动力大,但却不能 实现汽车在各种车速下驾驶时的轻便 性和路感。而EPS系统的滞后特性可 以通过EPS控制器的软件加以补偿, 使汽车在各种速度下都能得到满意的 转向助力。
EPS电动助力转向系统的标定PPT课件

道路试验客观评价:
原地转向轻便性试验 蛇行试验 稳态回转试验
Page 10
部分资料从网络收集整 理而来,供大家参考,
感谢您的关注!
T z m a x 无助力时转向盘上的最大输入力矩,可通过试验求得
Th m ax
Page 6
有助力时转向盘上由驾驶员提供的最大力矩,等于T2
试验时,我们先在没有助力系统的车 上测出0km/h和80km/h时的最大阻力矩,按 照上述方法设计出直线型助力特性,0km/h 和80km/h之间的整数车速度 10km/h,20km/h……按角度等分。其它的车 速可用插值运算得到。
T2之后为助力饱和 区。
T1—启动助力时的操纵力 矩 T2—驾驶员在恒定车速下 可提供的最大力矩
Page 5
标定需确定T1,T2,斜率K T1可由实验获得,如某轿车为1N·M T2经验值确定 不同车速下斜率K的确定:
K Ts max T2 T1
Tzm axThm axTsm ax
T s m a x 助力电机在某恒定车速下应输出的最大助力矩
标定目的:在一定的车速下对上述EPS参数调整、优化并确
定最终电动助力转向系统的各种运行控制参数,最终达到所 要求的性能。
Page 3
标定系统设备
标定软件平台 车速传感器 转向盘扭矩传感器 电机电流传感器
Page 4
EPS助力特性的标定
从坐标原点到T1之 间为无助力区。
T1到TS 系统参数标定取值范围
助力增益: 0—2 主动回正系数:0—3 力矩微分系数:0—0.2 阻尼补偿系数:0—0.02 惯性补偿系数:0—0.002 摩擦补偿系数:0—2
Page 8
实验评判标准
主动回正系数:不同车速段,方向盘恰好回正,没有不足也不回正超 调。
原地转向轻便性试验 蛇行试验 稳态回转试验
Page 10
部分资料从网络收集整 理而来,供大家参考,
感谢您的关注!
T z m a x 无助力时转向盘上的最大输入力矩,可通过试验求得
Th m ax
Page 6
有助力时转向盘上由驾驶员提供的最大力矩,等于T2
试验时,我们先在没有助力系统的车 上测出0km/h和80km/h时的最大阻力矩,按 照上述方法设计出直线型助力特性,0km/h 和80km/h之间的整数车速度 10km/h,20km/h……按角度等分。其它的车 速可用插值运算得到。
T2之后为助力饱和 区。
T1—启动助力时的操纵力 矩 T2—驾驶员在恒定车速下 可提供的最大力矩
Page 5
标定需确定T1,T2,斜率K T1可由实验获得,如某轿车为1N·M T2经验值确定 不同车速下斜率K的确定:
K Ts max T2 T1
Tzm axThm axTsm ax
T s m a x 助力电机在某恒定车速下应输出的最大助力矩
标定目的:在一定的车速下对上述EPS参数调整、优化并确
定最终电动助力转向系统的各种运行控制参数,最终达到所 要求的性能。
Page 3
标定系统设备
标定软件平台 车速传感器 转向盘扭矩传感器 电机电流传感器
Page 4
EPS助力特性的标定
从坐标原点到T1之 间为无助力区。
T1到TS 系统参数标定取值范围
助力增益: 0—2 主动回正系数:0—3 力矩微分系数:0—0.2 阻尼补偿系数:0—0.02 惯性补偿系数:0—0.002 摩擦补偿系数:0—2
Page 8
实验评判标准
主动回正系数:不同车速段,方向盘恰好回正,没有不足也不回正超 调。
汽车电动助力转向系统PPT课件
助力转向系统的要求
• 对转向系统的要求,主要概括为转向的灵敏度和操纵的轻 便性。高的转向灵敏度,要求转向器具有小的传动比,以 小的转向盘转角迅速转向,好的操纵轻便性,则要求转向 器具有大的传动比,这样才能以较小的转向盘操纵力获得 大的转向力矩。 • 实际应用中,一般要求:当转向轮达到最大设计转角时, 转向盘总转数不宜超过5圈,而转向盘操纵力最大不超过 250N
由于汽车高速化后,地面对行路机构和转 向系统的冲击力明显增大。从而,对行驶的安 全性、操纵性、稳定性提出更高的要求。为此, 电控动力转向系统,在各类汽车上普遍装用, 已成为必备的装置。 优点和具体功能: 1、减小转向时的操纵力—减轻司机的疲劳程 度,特别是装用超低压扁平胎的乘用车更为必 要。
2、根据车速的高低和行驶条件的变化(静态或动态; 好路或坏路),提供合适的转向助力,提高汽车行 驶的安全性、操纵性、稳定性。 3、具体功能如下: (1)原地转向或低车速行驶转向时—操纵轻便,路 感良好。 (2)中、高速行驶转向时—根据车速的高低,适 当助力;车速愈高,助力愈小,使司机有一定的轻、 重手感,无转向发飘的感觉。
(二)电动助力转向国家政策支持
• 原机械工业部汽车司在1999年《未来十年中国汽车工业产 品与技术发展》报告中,就将电动助力转向列为我国汽车 工业积极开展研究的产品与技术项目; • “十五”国家863电动汽车重大科技专项、 “十一五”国 家863节能与新能源汽车重大专项都把电动助力转向列为子 项目作为电动汽车优先发展的零部件产品;
转向系统的分类
传统液压式助力转向系统 电子控制式液压助力转向系统
电动助力转向系统
传统液压式助力转向系统
• 机械式的液压助力转向系统一般由液压泵、油管、压力流 量控制阀体、V型传动皮带、储油罐等部件构成。 • 无论车是否转向,这套系统都要工作,而且在大转向车速 较低时,需要液压泵输出更大的功率以获得比较大的助力。 所以,也在一定程度上浪费了资源。还有,机械式液压助 力转向系统由液压泵及管路和油缸组成,为保持压力,不 论是否需要转向助力,系统总要处于工作状态,能耗较高, 这也是耗资源的一个原因所在。
《汽车电子助力转向》课件

组成:包括电动机、传感器、 控制器、执行器等
电动机:提供助力,根据转 向信号调整助力大小
传感器:检测转向角度、车 速等信号,传递给控制器
控制器:根据传感器信号控 制电动机工作,实现助力效 果
执行器:将电动机输出的助 力传递给转向系统,实现转 向操作
工作原理与特点
工作原理:通过电动机驱动转 向助力器,实现转向助力
案例一:某品牌汽车 电子助力转向系统故 障,导致车辆失控, 引发交通事故
案例二:某品牌汽车 电子助力转向系统故 障,导致车辆无法转 向,影响驾驶安全
案例三:某品牌汽车 电子助力转向系统故 障,导致车辆无法启 动,影响出行效率
启示:汽车电子助力 转向系统需要定期检 查和维护,确保其正 常运行,提高驾驶安 全性和舒适性。
自动驾驶技术的发展: 电子助力转向系统将 更加智能化,实现自 动驾驶功能
环保法规的推动:电 子助力转向系统将更 加节能环保,满足日 益严格的环保法规要 求
市场竞争的加剧:电 子助力转向系统制造 商需要不断创新,提 高产品质量和性能, 以应对市场竞争
技术挑战:电子助力 转向系统需要解决技 术难题,如可靠性、 稳定性、安全性等方 面的问题
电机散热:风冷、水冷等
电机控制:矢量控制、直接转矩控制等
电机安全:过热保护、过流保护等
电机性能:转速、扭矩、效率等
电机与转向系统的匹配与优化
控制算法与策略
控制算法: PID控制、模 糊控制、神经 网络控制等
控制策略:转 向助力、转向 回正、转向稳
定性等
传感器技术: 陀螺仪、加速 度计、磁力计
等
电机驱动技术: 控制软件:嵌
实践案例分享与剖析
案例一:某品牌汽车电子助力转向系统的优化设计 案例二:某品牌汽车电子助力转向系统的实践应用 案例三:某品牌汽车电子助力转向系统的故障分析与解决 案例四:某品牌汽车电子助力转向系统的性能测试与评估
电动助力转向EPS.最全PPT
3. 小齿轮型EPS——这种结构型式的EPS,其动力辅助单元安装在转向机构的小齿轮轴上,由于动力辅助单元在 车厢外面,使得即使辅助力矩有很大增加也不会增加车厢内的噪声。如果再将它与可变速比的转向器结合在一起, 该系统的操纵特性将会非常好。 4. 直接驱动型EPS——转向齿条与动力辅助单元形成一个部件,该系统很紧凑,而且容易将它布置在发动机舱内, 由于直接对齿条通过助力,摩擦与惯性都很小,进而打方向盘的感觉很理想。
电动助力转向的国内外应用 捷达--速腾
电动助力转向的国内外应用
电动助力转向的国内外应用
国内
国内广州本田和昌河汽车与本田和铃木公司合作,在广州飞 度和昌河北斗星上安装了电动助力转向,成为这些轿车参与市场 竞争的新亮点。另外国内新近推出的途安、开迪、雨燕、皇冠也 都装备了EPS。 部分高校和企业已开始电动助力转向的研究开发工作。高校 主要有清华大学、吉林大学、北京理工大学、天津大学、江苏大 学、湖北汽车工业学院及合肥工大等;企业主要有南方动力、荆 州恒隆、重庆驰骋、南京标准件厂等等。
EPAS 或EPS)
转矩信号采 集与处理
通
电动助力转向的国内外应用 电动助力转向关键零部件 企业主要有南方动力、荆
助力电机
电流信号采
讯
集与处理
模
块
上位机 显示
液直压接电 驱动动转型向EP系S统—(—El转ec向tro齿-H条yd与ra动ul力ic辅Po助w单er元St形ee成rin一g个E部HP件S,) 该系统很紧蓄信 凑电,号池 而采且电集容压易将它布置在发动机舱内,由于直接对齿条通过助力,摩擦与惯性都很小,进而打方向盘的感
或steering by wire SBW)
车速信号发生器
部如分果高 再校将和它企与业可已变开速始比电的动转助向力器转结向合的在研一究起开,( 控发该E制 C工系U器 作统)。的操纵特性将会发 非常动好机。信号发生器
电动助力转向的国内外应用 捷达--速腾
电动助力转向的国内外应用
电动助力转向的国内外应用
国内
国内广州本田和昌河汽车与本田和铃木公司合作,在广州飞 度和昌河北斗星上安装了电动助力转向,成为这些轿车参与市场 竞争的新亮点。另外国内新近推出的途安、开迪、雨燕、皇冠也 都装备了EPS。 部分高校和企业已开始电动助力转向的研究开发工作。高校 主要有清华大学、吉林大学、北京理工大学、天津大学、江苏大 学、湖北汽车工业学院及合肥工大等;企业主要有南方动力、荆 州恒隆、重庆驰骋、南京标准件厂等等。
EPAS 或EPS)
转矩信号采 集与处理
通
电动助力转向的国内外应用 电动助力转向关键零部件 企业主要有南方动力、荆
助力电机
电流信号采
讯
集与处理
模
块
上位机 显示
液直压接电 驱动动转型向EP系S统—(—El转ec向tro齿-H条yd与ra动ul力ic辅Po助w单er元St形ee成rin一g个E部HP件S,) 该系统很紧蓄信 凑电,号池 而采且电集容压易将它布置在发动机舱内,由于直接对齿条通过助力,摩擦与惯性都很小,进而打方向盘的感
或steering by wire SBW)
车速信号发生器
部如分果高 再校将和它企与业可已变开速始比电的动转助向力器转结向合的在研一究起开,( 控发该E制 C工系U器 作统)。的操纵特性将会发 非常动好机。信号发生器
EPS电动助力转向系26页PPT
• EPS的减速机构与电动机相连,起减速增扭作用。常采用
涡轮蜗杆机构,也有采用行星齿轮机构
ESP工作原理
• 电动助力转向系统通常由扭距传感器、车速传感器、电子 控制单元ECU、电动机、减速机构等组成。转矩传感器,
检测转向轮的运动情况和车辆的运动情况;电控单元,根 据转矩传感器提供的信号计算助力的大小; 电机,根据 电控单元输出值生成转动力;减速齿轮,提高电机产生的
• 齿轮助力式电动助力转向 器(P-EPS)的助力电机和 减速增扭机构与小齿轮相 连,直接驱动齿轮实现助 力转向(图3)。由于助力电 机不是安装在乘客舱内, 因此可以使用较大的电机 以获得较高的助力扭矩, 而不必担心电机转动惯量 太大产生的噪声。该类型 转向器可用于中型车辆, 以提供较大的助力。
• 齿条助力式电动助力 转向器(R-EPS)的助力 电机和减速增扭机构
出至EPS ECU
转向
扭转杆 分相器单元1
分相器单元2 小齿轮轴 (输出轴)
转向主轴 (输入轴)
至EPS ECU
齿条轴
• 工作原理:扭转杆扭转后使两个分相器单元产生 一个相对角度
转向主轴 (输入轴)
分相器单元1 (转子部分)
分相器单元2 (转子部分)
小齿轮轴 (输出轴)
• 扭矩传感器检测方法
定子部分
– 转向时节转子部分的两个分相器单元产生相对 角度
[分相器单元1 输出信号]
[分相器单元2 输出信号]
t
t
t
t
• EPS ECU根据两个分相器单元的相对位置决定对 EPS马达提供多少电压
1
1 - 2
EPS ECU
2
转向马
达电压
• 马达 (无电刷) – 马达与齿条轴共轴, 由转角传感器、定子及转子组成
涡轮蜗杆机构,也有采用行星齿轮机构
ESP工作原理
• 电动助力转向系统通常由扭距传感器、车速传感器、电子 控制单元ECU、电动机、减速机构等组成。转矩传感器,
检测转向轮的运动情况和车辆的运动情况;电控单元,根 据转矩传感器提供的信号计算助力的大小; 电机,根据 电控单元输出值生成转动力;减速齿轮,提高电机产生的
• 齿轮助力式电动助力转向 器(P-EPS)的助力电机和 减速增扭机构与小齿轮相 连,直接驱动齿轮实现助 力转向(图3)。由于助力电 机不是安装在乘客舱内, 因此可以使用较大的电机 以获得较高的助力扭矩, 而不必担心电机转动惯量 太大产生的噪声。该类型 转向器可用于中型车辆, 以提供较大的助力。
• 齿条助力式电动助力 转向器(R-EPS)的助力 电机和减速增扭机构
出至EPS ECU
转向
扭转杆 分相器单元1
分相器单元2 小齿轮轴 (输出轴)
转向主轴 (输入轴)
至EPS ECU
齿条轴
• 工作原理:扭转杆扭转后使两个分相器单元产生 一个相对角度
转向主轴 (输入轴)
分相器单元1 (转子部分)
分相器单元2 (转子部分)
小齿轮轴 (输出轴)
• 扭矩传感器检测方法
定子部分
– 转向时节转子部分的两个分相器单元产生相对 角度
[分相器单元1 输出信号]
[分相器单元2 输出信号]
t
t
t
t
• EPS ECU根据两个分相器单元的相对位置决定对 EPS马达提供多少电压
1
1 - 2
EPS ECU
2
转向马
达电压
• 马达 (无电刷) – 马达与齿条轴共轴, 由转角传感器、定子及转子组成
《汽车电器与电子技术》第10章汽车电动助力转向系统PPT课件
图8 转矩传感器输出特性
(5)改变不同的电动助力转向系统的参数,应用该方法,可得到不同的助力特性。
最新课件
19
四.电动助力转向的控制方法
4.1电动助力转向的控制原理 电子控制电动动力转向的控制系统如图9所示。该系统的核心是一个有4KB ROM和
256KB RAM的8位微机。
图9 电子控制电动助力转向的控制系统
H cs T d sd d m rs 2 G A cm s K rs 2 aK s Gm K
(9)
最新课件
15
式中:A csD sdsKsGarK s2sKm Dsdmdsdmdm rsK 2s2dsG rs2 2Km 2
d ssJss2 b ss K s
d m s J m s2 b m s K m
(2)在转向转矩较小的区域,提供的转向助力较小或为零,且在不同车速时,提供的助力 时机不同,这就保持了较好的转向路感;在常用的快速转向行驶区间,助力效果明显,转 向轻便,降低了驾驶员劳动强度。
(3)不同车速时,提供的转向助力增益不同。原地转向或车速较低时转向助力增益较大, 转向最轻便。
(4)当转向盘转矩Md≥7(N.m)时,助力力矩Ma将保持不变。这与如图10-9所示的力矩 传感器输出特性有关。当其转角大于8°(Md=7N.m)时,输出电压不再发生变化,相应 助力转矩Md也不会发生变化。这使得电动机电流不致过大而烧毁电机。
图6 电动助力转向系统动态模型
最新课件
11
式中Mm为电动机的电磁转矩,其值决定于电动机的给定电流大小。在本系统的计 算中,Mm值由转矩传感器给出,可表示如下:
M mK aK s sr x s
0K aK a max (4)
K a ——转向助力增益。 K a 值定义了转向路感,合理选择Ka可得到不同的转向路感。