现代控制理论1-8三习题库
现代控制理论习题集

现代控制理论习题集序为了帮助同学们更好地学习《现代控制理论》这门大学自动化专业的主干基础课程,在王整风老师的指导下,我们共同编写了这本基于刘豹版本教材的习题集,希望能让大家拥有做题不仅仅注重题目答案,更关注解题过程的意识。
本书第一章由张胜编写,第二章由何新礼编写,第三章由刘洋编写,第四章由邢雅琪编写,第五章由孙峰编写,由宋永康和王彦明统稿,在此向王老师和以上同学表示感谢。
由于时间仓促,本习题集难免有不当之处,个别题目的解法并不唯一,解题过程难免有错误、疏漏的地方,恳请大家批评指正。
编者2013年6月目录第一章控制系统的状态空间表达式 (1)第二章控制系统状态空间表达式的解 (13)第三章线性控制系统的能控性和观性 (21)第四章稳定性与李亚普诺夫方法 (33)第五章线性定常系统综合 (38)第一章控制系统的状态空间表达式张胜1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:直接对系统方块结构图转化得系统的模拟结构图如下:可得系统的状态方程:故系统的状态空间表达式为:1-2 有电路如图1-28所示。
以电压u(t)为输入量,求以电感中的电流和电容上的R上的电压作为输出量的输出方程。
电压作为状态变量的状态方程,和以电阻2解:易得系统为3维单输入单输出系统:假定流过c U 上的电流向下,对图中的两个回路由KVL 得 :解得213.11x Cx C x -=转化成矩阵形式为:1-4 两输入21,u u ,两输出21,y y 的系统。
其结构模拟图如图1.30所示,试求其状态空间表达式和传递函数阵。
解:令11y u -前向通道上积分号后的状态变量分别为12,x x ;22y u -前向通道上积分号后的状态变量分别为4,3x x 。
由于系统为四维,两输入,两输出系统,故系统阵A 为4×4阶,输入阵B 为4×2阶,输出阵C 为2×4阶。
由图得,系统的状态空间表达式如下:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡43212101000001x x x x y y由 可求得系统传递函数阵。
(完整word版)现代控制理论复习题库

一、选择题1.下面关于建模和模型说法错误的是( C )。
A.无论是何种系统,其模型均可用来提示规律或因果关系。
B.建模实际上是通过数据、图表、数学表达式、程序、逻辑关系或各种方式的组合表示状态变量、输入变量、输出变量、参数之间的关系。
C.为设计控制器为目的建立模型只需要简练就可以了。
D.工程系统模型建模有两种途径,一是机理建模,二是系统辨识。
2.系统()3()10()++=的类型是( B ) 。
y t y t u tA.集中参数、线性、动态系统。
B.集中参数、非线性、动态系统。
C.非集中参数、线性、动态系统。
D.集中参数、非线性、静态系统。
3.下面关于控制与控制系统说法错误的是( B )。
A.反馈闭环控制可以在一定程度上克服不确定性。
B.反馈闭环控制不可能克服系统参数摄动。
C.反馈闭环控制可在一定程度上克服外界扰动的影响。
D.控制系统在达到控制目的的同时,强调稳、快、准、鲁棒、资源少省。
x Pz说法错误的是( D )。
4.下面关于线性非奇异变换=A.非奇异变换阵P是同一个线性空间两组不同基之间的过渡矩阵。
B.对于线性定常系统,线性非奇异变换不改变系统的特征值。
C.对于线性定常系统,线性非奇异变换不改变系统的传递函数。
D.对于线性定常系统,线性非奇异变换不改变系统的状态空间描述。
5.下面关于稳定线性系统的响应说法正确的是( A )。
A.线性系统的响应包含两部分,一部是零状态响应,一部分是零输入响应。
B.线性系统的零状态响应是稳态响应的一部分。
C.线性系统暂态响应是零输入响应的一部分。
D.离零点最近的极点在输出响应中所表征的运动模态权值越大。
6.下面关于连续线性时不变系统的能控性与能观性说法正确的是( A ) 。
A.能控且能观的状态空间描述一定对应着某些传递函数阵的最小实现。
B.能控性是指存在受限控制使系统由任意初态转移到零状态的能力。
C.能观性表征的是状态反映输出的能力。
D.对控制输入的确定性扰动影响线性系统的能控性,不影响能观性。
现代控制理论习题集_免费下载
现代控制理论习题集序为了帮助同学们更好地学习《现代控制理论》这门大学自动化专业的主干基础课程,在王整风老师的指导下,我们共同编写了这本基于刘豹版本教材的习题集,希望能让大家拥有做题不仅仅注重题目答案,更关注解题过程的意识。
本书第一章由张胜编写,第二章由何新礼编写,第三章由刘洋编写,第四章由邢雅琪编写,第五章由孙峰编写,由宋永康和王彦明统稿,在此向王老师和以上同学表示感谢。
由于时间仓促,本习题集难免有不当之处,个别题目的解法并不唯一,解题过程难免有错误、疏漏的地方,恳请大家批评指正。
编者2013年6月目录第一章控制系统的状态空间表达式 (1)第二章控制系统状态空间表达式的解 (13)第三章线性控制系统的能控性和观性 (21)第四章稳定性与李亚普诺夫方法 (33)第五章线性定常系统综合 (38)第一章控制系统的状态空间表达式张胜1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:直接对系统方块结构图转化得系统的模拟结构图如下:可得系统的状态方程:故系统的状态空间表达式为:1-2 有电路如图1-28所示。
以电压u(t)为输入量,求以电感中的电流和电容上的R上的电压作为输出量的输出方程。
电压作为状态变量的状态方程,和以电阻2解:易得系统为3维单输入单输出系统:假定流过c U 上的电流向下,对图中的两个回路由KVL 得 :解得213.11x Cx C x -=转化成矩阵形式为:1-4 两输入21,u u ,两输出21,y y 的系统。
其结构模拟图如图1.30所示,试求其状态空间表达式和传递函数阵。
解:令11y u -前向通道上积分号后的状态变量分别为12,x x ;22y u -前向通道上积分号后的状态变量分别为4,3x x 。
由于系统为四维,两输入,两输出系统,故系统阵A 为4×4阶,输入阵B 为4×2阶,输出阵C 为2×4阶。
由图得,系统的状态空间表达式如下:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡43212101000001x x x x y y由 可求得系统传递函数阵。
现代控制理论试题与答案
现代控制理论试题与答案现代控制理论1.经典-现代控制区别:经典控制理论中,对⼀个线性定常系统,可⽤常微分⽅程或传递函数加以描述,可将某个单变量作为输出,直接和输⼊联系起来;现代控制理论⽤状态空间法分析系统,系统的动态特性⽤状态变量构成的⼀阶微分⽅程组描述,不再局限于输⼊量,输出量,误差量,为提⾼系统性能提供了有⼒的⼯具.可以应⽤于⾮线性,时变系统,多输⼊-多输出系统以及随机过程.2.实现-描述由描述系统输⼊-输出动态关系的运动⽅程式或传递函数,建⽴系统的状态空间表达式,这样问题叫实现问题.实现是⾮唯⼀的.3.对偶原理系统=∑1(A1,B1,C1)和=∑2(A2,B2,C2)是互为对偶的两个系统,则∑1的能控性等价于∑2的能观性, ∑1的能观性等价于∑2的能控性.或者说,若∑1是状态完全能控的(完全能观的),则∑2是状态完全能观的(完全能控的).对偶系统的传递函数矩阵互为转置4.对线性定常系统∑0=(A,B,C),状态观测器存在的充要条件是的不能观⼦系统为渐近稳定第⼀章控制系统的状态空间表达式1.状态⽅程:由系统状态变量构成的⼀阶微分⽅程组2.输出⽅程:在指定系统输出的情况下,该输出与状态变量间的函数关系式3.状态空间表达式:状态⽅程和输出⽅程总合,构成对⼀个系统完整动态描述4.友矩阵:主对⾓线上⽅元素均为1:最后⼀⾏元素可取任意值;其余元素均为05.⾮奇异变换:x=Tz,z=T-1x;z=T-1A Tz+T-1Bu,y=CTz+Du.T为任意⾮奇异阵(变换矩阵),空间表达式⾮唯⼀6.同⼀系统,经⾮奇异变换后,特征值不变;特征多项式的系数为系统的不变量第⼆章控制系统状态空间表达式的解1.状态转移矩阵:eAt,记作Φ(t)2.线性定常⾮齐次⽅程的解:x(t)=Φ(t)x(0)+∫t0Φ(t-τ)Bu(τ)dτ第三章线性控制系统的能控能观性1.能控:使系统由某⼀初始状态x(t0),转移到指定的任⼀终端状态x(tf),称此状态是能控的.若系统的所有状态都是能控的,称系统是状态完全能控2.系统的能控性,取决于状态⽅程中系统矩阵A和控制矩阵b3.⼀般系统能控性充要条件:(1)在T-1B中对应于相同特征值的部分,它与每个约旦块最后⼀⾏相对应的⼀⾏元素没有全为0.(2)T-1B中对于互异特征值部分,它的各⾏元素没有全为0的4.在系统矩阵为约旦标准型的情况下,系统能观的充要条件是C中对应每个约旦块开头的⼀列的元素不全为05.约旦标准型对于状态转移矩阵的计算,可控可观性分析⽅便;状态反馈则化为能控标准型;状态观测器则化为能观标准型6.最⼩实现问题:根据给定传递函数阵求对应的状态空间表达式,其解⽆穷多,但其中维数最⼩的那个状态空间表达式是最常⽤的.第五章线性定常系统综合1.状态反馈:将系统的每⼀个状态变量乘以相应的反馈系数,然后反馈到输⼊端与参考输⼊相加形成控制律,作为受控系统的控制输⼊.K为r*n维状态反馈系数阵或状态反馈增益阵2.输出反馈:采⽤输出⽮量y构成线性反馈律H为输出反馈增益阵3.从输出到状态⽮量导数x的反馈:A+GC4.线性反馈:不增加新状态变量,系统开环与闭环同维,反馈增益阵都是常矩阵动态补偿器:引⼊⼀个动态⼦系统来改善系统性能5.(1)状态反馈不改变受控系统的能控性(2)输出反馈不改变受控系统的能控性和能观性6.极点配置问题:通过选择反馈增益阵,将闭环系统的极点恰好配置在根平⾯上所期望的位置,以获得所希望的动态性能 (1)采⽤状态反馈对系统任意配置极点的充要条件是∑0完全能控(2)对完全能控的单输⼊-单输出系统,通过带动态补偿器的输出反馈实现极点任意配置的充要条件[1]∑0完全能控[2]动态补偿器的阶数为n-1(3)对系统⽤从输出到x 线性反馈实现闭环极点任意配置充要条件是完全能观 7.传递函数没有零极点对消现象,能控能观8.对完全能控的单输⼊-单输出系统,不能采⽤输出线性反馈来实现闭环系统极点的任意配置9.系统镇定:保证稳定是控制系统正常⼯作的必要前提,对受控系统通过反馈使其极点均具有负实部,保证系统渐近稳定 (1)对系统采⽤状态反馈能镇定的充要条件是其不能控⼦系统渐近稳定(2)对系统通过输出反馈能镇定的充要条件是其结构分解中的能控且能观⼦系统是输出反馈能镇定的,其余⼦系统是渐近稳定的(3)对系统采⽤输出到x 反馈实现镇定充要条件是其不能观⼦系统为渐近稳定10.解耦问题:寻求适当的控制规律,使输⼊输出相互关联的多变量系统的实现每个输出仅受相应的⼀个输⼊所控制,每个输⼊也仅能控制相应的⼀个输出11.系统解耦⽅法:前馈补偿器解耦和状态反馈解耦 12.全维观测器:维数和受控系统维数相同的观测器现代控制理论试题1 ①已知系统u u u y y 222++=+ ,试求其状态空间最⼩实现。
现代控制理论1-8三习题库
信息工程学院 现代控制理论 课程习题清单
3 学分,48 学 课程归属
学分、学时
时
(系、专业) 自动化系
授课专业 年级
自动化大三
总章节或
总单元
6
授课周数
16
教师教龄
2
命题教师
课程负责人
教学副院长
签名
签名
签名
课程目标:
自动控制领域的科学研究方法,已经由最早的经典控制中以输入输出模型为主,发展为
现今的现代控制中以状态空间模型为主。因而,“现代控制理论”是从事自动化专业必备的
复习题
2. 若已知系统的模拟结构图,如何建立其状态空间表达式? 3. 求下列矩阵的特征矢量
1 -1 0
A
4. (判断)状态变量的选取具有非惟一性。 5. (判断)系统状态变量的个数不是惟一的,可任意选取。 6. (判断)通过适当选择状态变量,可将线性定常微分方程描述其输入输
U(s) +
K1
+
KpsK1 +
1
- Kps K1
s
-
-
J1s
Kn s
Kb (s)
J2s2
练习题
图1-27系统方块结构图
2. 有电路如图所示,设输入为 ,输出为 ,试自选状态变量并列写出其状
态空间表达式。
R1
u1
u C1
R2
uC2
u2
3. 有电路如图 1-28 所示。以电压 u(t) 为输入量,求以电感中的电流和电
3 均为标量。
d
u
3
2
1
+
y
+
x3 1/s x3 +
《现代控制理论》第3版课后习题答案
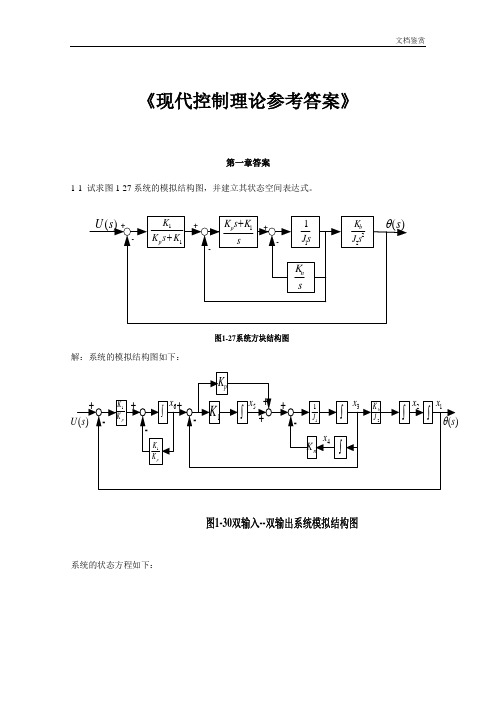
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论基础题库(带答案)

现代控制理论基础题库1、已知某系统的传递函数为:,以下状态空间描述正确的是(C)2、控制理论的发展阶段为(A)。
A、经典控制理论、现代控制理论和鲁棒控制理论B、经典控制理论、现代控制理论C、经典控制理论、鲁棒控制理论D、现代控制理论3、下面关于线性定常系统的非奇异线性变换说法错误的是(C)A、对于线性定常系统,非奇异线性变换不改变系统的传递函数矩阵B、对于线性定常系统,非奇异线性变换不改变系统的特征多项式C、对于线性定常系统,非奇异线性变换不改变系统的状态空间描述D、对于线性定常系统,非奇异线性变换不改变系统的特征值4、状态方程是什么方程(B)A、高阶微分方程B、一阶微分方程C、代数方程D、高阶差分方程5、现代控制理论在整个控制理论发展中起到了什么作用?AA、承上启下B、总结C、开拓D、引领6、能完全描述系统动态行为的数学模型是(B)A、差分方程B、状态空间表达式C、微分方程D、传递函数7、输出方程是(C)A、一阶微分方程B、高阶微分方程C、代数方程D、高阶差分方程8、若某一系统的状态空间描述为:(单选)则与其对应的传递函数为(B)9、以下叙述错误的是(C)A、系统的状态空间模型包括状态方程和输出方程B、状态空间模型不仅可以描述时不变系统,还可以描述时变系统C、一个给定的系统只存在一组动态方程D、状态空间模型存在多种等效的标准型10、以下叙述正确的是(A)A、状态空间模型(A,B,C)的极点等于矩阵A的特征根B、状态空间模型中,系统的输出是由微分方程决定的C、如果系统存在多个状态,则系统可建立对角矩阵形式的状态空间模型D、给定系统的状态微分方程,总能够求出状态的数学表达式。
11、某弹簧-质量-阻尼器机械位移系统如下图所示,图中,K为弹簧的弹性系数,M为质量块的质量,f为阻尼器的阻尼系数,y为质量块M的位移,也是系统的输出量。
为建立其状态空间表达式,以下状态变量的选择方式正确的是(D)(单选)12、某单输入-单输出系统的状态空间模型为(D)则该系统的极点为:A、1,3B、-1,3C、1,-3D、-1,-313、线性定常系统的状态解析表达式中包含ABCA、初始状态B、状态转移矩阵C、输入D、过去时刻的状态14、现代控制理论已经应用在哪些领域ABCDA、倒立摆稳定控制B、工业领域C、航天航空领域D、机器人控制15、哪些内容是现代控制理论的知识体系?ABCDA、系统辨识B、线性系统C、最优估计D、最优控制16、以下哪些条件下,状态变量可以描述系统的未来响应:ABDA、给定当前状态B、给定输入C、给定输出D、给定动态方程17、状态方程是唯一的(错)18、系统状态空间模型中的状态变量可能没有实际物理意义(对)19、具有互不相同的极点的系统总能够化成对角线标准型(对)20、时变控制系统是指一个或多个系统参数会随时间变化的系统。
《现代控制理论》第3版课后习题答案

《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得2221332222213*********1x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有 相应的模拟结构图如下:1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++=1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图(2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P (或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=14222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P ) 当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P 1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P 当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--23132313311201214p p p p p p解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为 (1)⎥⎦⎤⎢⎣⎡=11b 解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
13.若矩阵A的n个特征值互异,则可通过线性变换将其化为 角阵,雅可比阵)。
14.状态变量是确定系统状态的(最小,最大)一组变量。
15.以所选择的一组状态变量为坐标轴而构成的正交(线性,非线性)
空间,称之为_,(传递函数,状态空间)。
1.试求图1-27系统的模拟结构图,并建立其状态空间表达式。
自动控制领域的科学研究方法,已经由最早的经典控制中以输入输出模型为主,发展为
现今的现代控制中以状态空间模型为主。因而,“现代控制理论”是从事自动化专业必备的
知识。“现代控制理论”的教学目标是使学生牢固树立线性系统中状态空间的概念、进一步 理解系统稳定性这一控制学科最为重要的概念,掌握能控与能观、状态反馈与状态估计等核
重点内容:逆矩阵、线性无关与线性相关定义、非齐次方程求解、哈密顿定理、定号性 理论等。
系统的数学描述可分为哪两种类型
自然界存在两类系统:静态系统和动态系统,有何区别 现代控制理论研究的主要内容是什么
现代控制理论研究对象
现代控制理论所使用的数学工具有哪些 现代控制理论问题的解决方法是什么
第二章(单元):
心方法。通过本课程学习,使学生做到各章概念融会贯通,解题方法灵活运用,分析解决实 际问题。从宏观角度把握课程的体系结构,建立起现代控制理论的基本框架。主要培养学生
以下三个方面的能力:
1、分析建模能力
根据系统的工作原理或实验数据,建立合理的数学模型。
2、认知和理解能力理解与Leabharlann 握能控性、能观测性与系统设计的关系,
合。这些信息对于确定系统(过去,未来)的行为是充分且必要
的。
10.如果系统状态空间表达式中矩阵A, B, C, D中所有元素均为实常数时,
则称这样的系统为(线性定常,线性时变)系统。如果这些元素
中有些是时间t的函数,则称系统为(线性定常,线性时变)系
统。
11.线性变换不改变系统的特征值,状态变量)。
容上的电压作为状态变量的状态方程,和以电阻
R2上的电压作为输出
量的输出方程。
L1广V*—i1>-
C
丰Uc
R2
图1-28电路图
4.
建立图P12所示系统的状态空间表达式。
M1
B1
f(t)
求下列矩阵的特征矢量
-1
复习题
10
(判断)
(判断)
(判断)
出关系的系统,表达为状态空间描述。
(判断)传递函数仅适用于线性定常系统;而状态空间表达式可以在定 常系统中应用,也可以在时变系统中应用.
如果矩阵A有重特征值,并且独立特征向量的个数小于n,则只能化为
模态阵。
动态系统的状态是一个可以确定该系统(结构,行为)的信息集
控制系统的状态空间表达式 本章节(单元)教学目标:
正确理解线性系统的数学描述,状态空间的基本概念, 熟练掌握状态空间的表达式, 线
性变换,线性定常系统状态方程的求解方法。
重点内容:状态空间表达式的建立,状态转移矩阵和状态方程的求解,线性变换的基本
性质,传递函数矩阵的定义。要求熟练掌握通过传递函数、微分方程和结构图建立电路、机 电系统的状态空间表达式, 并画出状态变量图,以及能控、能观、对角和约当标准型。 难点: 状态变量选取的非唯一性,多输入多输出状态空间表达式的建立。
4.
5.
6.
7.
8.
9.
状态变量的选取具有非惟一性。
系统状态变量的个数不是惟一的,可任意选取。
通过适当选择状态变量,可将线性定常微分方程描述其输入输
(对
练习题
U(
图1-27系统方块结构图
2.
有电路如图所示,设输入为 态空间表达式。
,输出为,试自选状态变量并列写出其状
R1
U
有电路如图1-28所示。以电压U(t)为输入量,求以电感中的电流和电
预习题
1
2
3
4
5
6
2.
3.
现代控制理论中的状态空间模型与经典控制理论中的传递函数有何区别 状态、状态空间的概念 状态方程规范形式有何特点 状态变量和状态矢量的定义
怎样建立状态空间模型 怎样从状态空间表达式求传递函数
怎样写出SISO系统状态空间表达式对应的传递函数阵表达式|fA=Al丰Bv
b
若已知系统的模拟结构图,如何建立其状态空间表达式
与状态反馈的关系。
3、设计实施能力
根据系统的不可变部分及给出的综合性性能指标,
矩阵,并画出模拟电路图。
第一章(单元):
绪论
本章节(单元)教学目标:
主要介绍控制理论的产生背景及现代控制理论研究的主要内容,使学生对现代控制理论
的发展及其所研究的主要问题有一个初步了解,并且复习、补充有关《线性代数》的内容。