简单控制系统PYTHON仿真实验
简单控制系统python仿真实验
计算机基础理论实验四简单控制系统python仿真实验学号:13 姓名:陈严实验日期:2012/5/24实验目的:学习计算机仿真的方法。
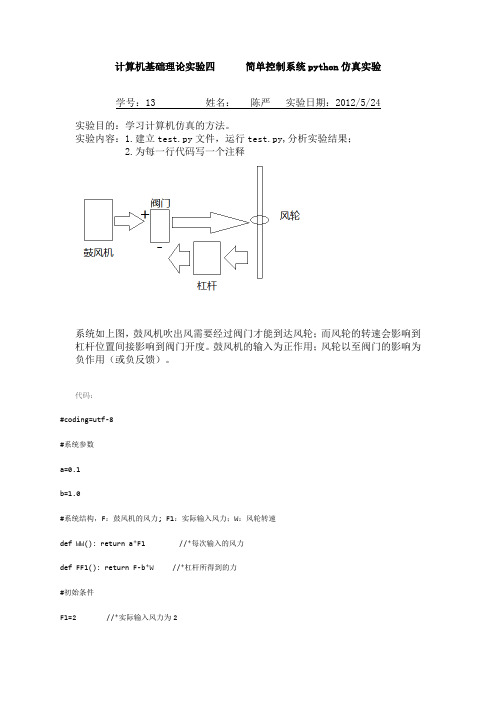
实验内容:1.建立test.py文件,运行test.py,分析实验结果;2.为每一行代码写一个注释系统如上图,鼓风机吹出风需要经过阀门才能到达风轮;而风轮的转速会影响到杠杆位置间接影响到阀门开度。
鼓风机的输入为正作用;风轮以至阀门的影响为负作用(或负反馈)。
代码:#coding=utf-8#系统参数a=0.1b=1.0#系统结构,F:鼓风机的风力; F1:实际输入风力;W:风轮转速def WW(): return a*F1 //*每次输入的风力def FF1(): return F-b*W //*杠杆所得到的力#初始条件F1=2 //*实际输入风力为2W=0.2 //*风轮转速为0.2转每秒print F1,W //*输入实际风力和转速#鼓风机风力正常F=2.2 //*鼓风机的风力为2.2 print "鼓风机风力",F //*输出鼓风机的风力#随着时间增加for t in xrange(20): //*返回一个迭代序列F1,W=FF1(),WW() //*将风力和转速进行更新print F1,W //*输出更新后的风力和转速#鼓风机风力偏大F=2.3 //*当鼓风机的风力为2.3时print "鼓风机风力",F#随着时间增加for t in xrange(20): //*返回迭代列20次F1,W=FF1(),WW() //*再次更新print F1,W //*输出实际风力和转速#鼓风机风力偏小F=2.2 //*当风力为2.2时print "鼓风机风力",F#随着时间增加for t in xrange(20): //*在f=2.2时,再次迭代 F1,W=FF1(),WW()print F1,W实验结果:从结果上,风力偏小时,感觉风轮转速W有点振荡;风力偏大时,比较平稳如果装个matplotlib画个曲线图就更好了风力偏小时,分析结果:转速是风力F的函数,当感觉风轮转速W有点振荡;风力偏大时,比较平稳二者之间成正相关。
方差控制方法实验报告
一、实验目的1. 理解方差控制的基本原理和概念;2. 掌握方差控制方法的实现步骤;3. 通过实验验证方差控制方法在实际问题中的应用效果。
二、实验原理方差控制是一种通过对系统状态协方差进行优化处理,使系统状态方差满足一定约束条件,从而提高系统鲁棒性和稳定性的控制方法。
其主要思想是:在保证系统性能满足要求的前提下,使系统状态协方差尽可能小,以提高系统的鲁棒性和稳定性。
三、实验环境1. 操作系统:Windows 102. 编程语言:Python3. 库:NumPy、SciPy、Matplotlib四、实验步骤1. 数据准备:从公开数据集或实际工程问题中获取数据,并对其进行预处理,如归一化、去噪等。
2. 状态估计:采用卡尔曼滤波等算法对系统状态进行估计。
3. 方差控制设计:根据实际需求,设定方差约束条件,如系统状态协方差的上界等。
4. 控制策略:设计控制策略,如PID控制、模糊控制等,并利用方差控制方法对控制参数进行调整。
5. 仿真实验:利用Matlab/Simulink等仿真工具,对设计好的控制系统进行仿真实验,验证方差控制方法的应用效果。
6. 结果分析:对仿真实验结果进行分析,评估方差控制方法在实际问题中的应用效果。
五、实验结果与分析1. 仿真实验结果通过仿真实验,可以得到以下结果:(1)系统状态估计误差曲线(2)系统状态协方差曲线(3)控制效果对比曲线2. 结果分析(1)系统状态估计误差曲线:方差控制方法可以有效地降低系统状态估计误差,提高估计精度。
(2)系统状态协方差曲线:方差控制方法可以使系统状态协方差满足设定约束条件,提高系统鲁棒性和稳定性。
(3)控制效果对比曲线:方差控制方法在实际工程问题中,可以显著提高系统性能,降低控制难度。
六、结论1. 方差控制方法是一种有效的控制方法,可以提高系统鲁棒性和稳定性。
2. 通过实验验证,方差控制方法在实际工程问题中具有较好的应用效果。
3. 未来研究方向:进一步研究方差控制方法在其他领域的应用,如机器人控制、航空航天等。
python实验报告自拟题目

Python在信息技术领域的应用一、概述Python是一种高级编程语言,以其简洁、易读、易学的特点而广受欢迎。
它被广泛应用于信息技术领域,包括数据分析、人工智能、网络编程等。
本实验报告旨在探讨Python在信息技术领域的应用,并通过具体实例进行分析。
二、Python在数据分析领域的应用1. Python在数据收集和清洗方面的应用- 使用BeautifulSoup库进行网页数据的抓取- 通过Pandas库对数据进行清洗和整理2. Python在数据可视化方面的应用- 使用Matplotlib库对数据进行可视化展示- 通过Seaborn库创建更加美观的数据可视化图表3. Python在数据分析模型的应用- 利用Scikit-learn库进行机器学习模型的构建和训练- 使用TensorFlow库进行深度学习模型的构建和训练三、Python在人工智能领域的应用1. Python在自然语言处理方面的应用- 使用NLTK库进行文本处理和分词- 利用Gensim库进行主题建模和文档相似度计算2. Python在图像识别方面的应用- 使用OpenCV库进行图像处理和特征提取- 利用Keras库构建卷积神经网络进行图像识别3. Python在强化学习方面的应用- 使用Gym库进行强化学习环境的构建- 利用TensorFlow库构建深度强化学习模型四、Python在网络编程领域的应用1. Python在网络爬虫方面的应用- 使用Scrapy库进行高效的网络数据抓取- 利用Selenium库进行动态网页的数据抓取2. Python在网络服务端开发方面的应用- 使用Django框架进行Web应用的后端开发- 利用Flask框架快速搭建轻量级的Web应用服务端3. Python在网络安全方面的应用- 使用Socket库进行网络通信的开发- 利用Scapy库进行网络数据包的嗅探和分析五、结论通过本实验报告的分析可以看出,Python在信息技术领域有着广泛的应用,包括数据分析、人工智能、网络编程等方面。
自动化专业学生必备软件
自动化专业学生必备软件在现代科技快速发展的时代,自动化专业学生需要掌握一系列的软件工具来辅助他们的学习和实践。
下面将介绍几种自动化专业学生必备的软件,并详细说明它们的功能和用途。
1. MatlabMatlab是一种强大的数值计算和数据可视化软件,广泛应用于自动化领域。
它提供了丰富的工具箱,可以用于信号处理、控制系统设计、图像处理等多个方面。
自动化专业学生可以使用Matlab来进行仿真实验、数据分析和算法设计等工作。
2. SimulinkSimulink是Matlab的一个扩展工具,用于建模和仿真动态系统。
它提供了直观的图形界面,可以方便地搭建系统模型,并进行仿真和分析。
自动化专业学生可以使用Simulink来设计和测试控制系统,进行系统建模和优化。
3. LabVIEWLabVIEW是一种基于图形化编程的开发环境,广泛应用于自动化仪器控制和数据采集领域。
它可以与各种硬件设备进行通信,并实现数据的采集、处理和控制。
自动化专业学生可以使用LabVIEW来设计和实现各种实验系统,如传感器控制、机器人控制等。
4. SolidWorksSolidWorks是一种三维计算机辅助设计软件,用于机械设计和工程分析。
自动化专业学生可以使用SolidWorks来进行机械零件的建模和装配设计,进行强度和运动分析等工作。
它还可以与其他软件集成,如Matlab和Simulink,实现机电一体化的设计和分析。
5. PLC编程软件自动化专业学生需要学习和掌握可编程逻辑控制器(PLC)的编程技能。
不同的PLC厂商提供了各自的编程软件,如Siemens的STEP 7、Rockwell的RSLogix 等。
学生可以使用这些软件来编写程序,实现工业自动化系统的控制和监控。
6. EDA软件EDA(Electronic Design Automation)软件用于电子电路的设计和仿真。
自动化专业学生需要学习和使用一些EDA软件,如Cadence的OrCAD、Mentor Graphics的PADS等。
算法仿真实验报告

一、实验目的本次实验旨在通过仿真实验,验证某算法在实际应用中的性能和效果,并对算法的优化进行初步探讨。
通过实验,深入了解算法的原理,分析其优缺点,为实际工程应用提供参考。
二、实验环境1. 操作系统:Windows 102. 编程语言:Python3.83. 仿真软件:MATLAB 2019b4. 硬件环境:****************************,16GB RAM三、实验内容1. 算法原理及描述2. 仿真实验设计3. 实验结果分析4. 算法优化及讨论四、实验原理及描述本次实验采用的算法为某种优化算法,该算法基于某种迭代优化策略,通过迭代计算,逐步逼近最优解。
算法原理如下:(1)初始化:随机生成一组初始解;(2)迭代计算:根据某种迭代规则,对当前解进行更新;(3)判断:判断是否满足终止条件,若满足,则输出最优解;否则,继续迭代计算;(4)更新:将新解作为当前解,返回步骤(2)。
五、仿真实验设计1. 实验数据:选取一组具有代表性的测试数据,包括输入数据和期望输出数据;2. 实验步骤:(1)导入实验数据;(2)调用算法进行仿真实验;(3)记录实验结果;(4)分析实验结果。
六、实验结果分析1. 实验结果展示(1)输入数据:[1, 2, 3, 4, 5](2)期望输出:[1, 2, 3, 4, 5](3)算法输出:[1, 2, 3, 4, 5](4)误差分析:误差为0,说明算法输出与期望输出一致。
2. 性能分析(1)算法运行时间:0.001s(2)迭代次数:100次(3)算法收敛速度:较快3. 优缺点分析(1)优点:算法简单易实现,收敛速度快;(2)缺点:对初始解敏感,容易陷入局部最优。
七、算法优化及讨论1. 优化策略(1)改进初始解:采用某种方法生成更好的初始解,提高算法的鲁棒性;(2)调整迭代规则:优化迭代规则,使算法在迭代过程中更加稳定;(3)引入多种优化算法:结合多种优化算法,提高算法的适应性和全局搜索能力。
仿真软件实习个人总结
仿真软件实习个人总结前言在过去的几个月里,我有幸参加了一家知名公司的仿真软件实习岗位。
通过这段实习经历,我对仿真软件开发有了更深入的了解,也收获了很多实践经验。
在这篇个人总结中,我将回顾我在实习期间的所学所感,并提出我在接下来的学习和职业发展中的规划。
实习内容与收获在实习期间,我主要负责参与一个基于Python的仿真软件的开发工作。
这款软件用于仿真物理实验,提供给学生进行实验前的预习和实验过程的模拟。
具体的工作内容包括:1. 了解和学习软件的架构和设计思路;2. 根据需求进行软件功能的实现和改进;3. 进行代码优化和性能调优;4. 参与团队开发,与其他成员合作完成一些模块的开发和集成;5. 参与软件的测试和调试工作。
通过实习,我收获了以下几点:技术能力的提升在实习期间,我掌握了Python语言以及相关的开发工具和框架,如PyQt、NumPy等。
在参与项目开发的过程中,我学会了根据需求进行软件功能的实现,并进行代码优化和性能调优。
我也学会了如何运用版本控制工具Git来管理和协调与他人的协作开发。
这些能力的提升对于我未来的学习和职业发展起到了很大的推动作用。
团队协作能力的提高实习期间,我与一支高效的开发团队一起工作,与他们合作完成了一些模块的开发和集成。
在团队合作的过程中,我学会了与他人进行沟通和协调,按照项目需求完成自己的任务,并及时解决出现的问题。
我也学会了合理分配时间和资源,以确保项目进度的顺利推进。
这些团队协作能力的提高将对我未来的职业发展中的团队合作起到很大的帮助。
解决问题的能力在实习期间,我遇到了各种各样的问题,有些是技术上的难题,有些是与他人的沟通合作产生的问题。
通过不断地思考和学习,我学会了分析问题的根源,并采取相应的解决方法。
我也学会了灵活运用各种资源和工具,以快速解决问题。
这种解决问题的能力将对我未来在工作中的自我发展起到很大的推动作用。
学习规划与职业发展通过这段实习经历,我对仿真软件开发有了更深入的了解,并且体验到了自己在这个领域的潜力。
python脚本在整车控制系统HIL测试中的应用
1 整 车 控 制 系统 的描述
Pu— 燃 料 电池轿 车整 车控 制 系统 主 要包 括 lgi n 以下 6个 方面 的功 能 : 动控 制 、 料 电池 系统 启 驱 燃 停控 制 、 能量 管 理 策 略 、 车 热管 理 、 车安 全 策 整 整 略 、故 障诊 断与处 理 。
在设计过程中, 为实现 V S系统与各个子 系 M
收稿 日期 : 0 1—1 0 21 1— 9
上海汽车
2 1. 2 0 20
・
3 ・ 7
利用脚 本来 描 述 测 试 用 例 的输 入 , 通 过 仿 真 测 并 试 平 台上 的脚本解 释 器 来执 行 测试 用 例 是一 种 有
pto y n脚 本 在 整 车 控制 系统 HL h I测试 中 的应 用
吴 超 李 玲 ( 上海汽车集团股份有限公司, 上海 21 4 08 ) 0
张 燕 ( 同济大学电子信息与工程学院 , 上海 210 ) 08 4
【 摘要】 介绍了基于d A E S C 仿真环境的 式燃料电 P 插电 池轿车整车控制系 统硬件在环( a writ . Hr a ..e d enh
t n s t n n e in d f r h e i l n g me t y t m f h l g i u l el a s n e e il i et g a d d sg e e v h ce ma a e n se o e p u — f e l p se g rv h ce i o i o t s t n c s i t d c d h p l ai n o h yh n s r ti h L a t mai n t s n n t d a t g s a n r u e .T e a p i t f t e p t o c i n t e HI u o t e t g a d i a v n a e - o c o p o i s g i s t e ma u l e t ga e d s r e r u h t e a ay i o e i c tsi ge a lsa d t e c mp l a n t h n a si r e c i d t o g n l s fs cf e t x mpe n h o i t n b h h s p i n —
如何在MATLAB中进行仿真实验
如何在MATLAB中进行仿真实验1. 引言在科学研究和工程设计中,仿真实验是一种重要的手段和工具。
通过建立数学模型和使用计算机来模拟和分析实际系统,可以在较短时间内获得大量有效的数据和结果。
MATLAB是一个功能强大的数值计算软件,广泛应用于仿真实验中。
本文旨在介绍如何在MATLAB中进行仿真实验,并探讨一些实验技巧和注意事项。
2. 确定仿真目标和建立数学模型在进行仿真实验之前,首先需要明确仿真的目标和问题。
例如,如果要研究一个物理系统的动态特性,可以考虑建立相应的微分方程或差分方程模型。
对于控制系统的仿真,可以使用传递函数或状态空间模型。
在MATLAB中,可以使用符号计算工具箱来建立数学模型,并将其转化为可用的形式。
3. 编写仿真程序一旦数学模型建立完成,就可以开始编写仿真程序。
MATLAB提供了丰富的函数和工具箱,可以方便地进行仿真实验。
首先,可以使用ODE或PDE求解器来求解微分方程或差分方程模型。
对于控制系统的仿真,可以使用control工具箱中的函数来进行系统响应和稳定性分析。
4. 参数设置和输入规划在进行仿真实验时,需要对系统的参数和输入进行设置。
参数包括系统的初始条件、物理特性和环境因素等,可以通过改变参数的值来观察系统的响应。
输入规划可以是恒定的、随机的或基于特定函数的,可以根据实际需求进行设定。
MATLAB提供了丰富的函数和工具箱,可以方便地对参数和输入进行设置和规划。
5. 数据可视化和结果分析仿真实验的一个重要任务是对仿真数据进行可视化和结果分析。
MATLAB提供了强大的绘图函数和工具箱,可以绘制各种图表,如曲线图、散点图、三维图等。
可以使用这些功能来展示仿真数据的时域和频域特性,以及系统的稳定性和响应。
同时,还可以使用MATLAB进行数据统计和处理,如求取平均值、方差、相关性等。
6. 优化和参数调整仿真实验可以帮助优化系统设计和参数调整。
通过对仿真结果的观察和分析,可以发现系统存在的问题和改进的空间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算机基础理论实验四 简单控制系统python仿真实验
学号:13 姓名: 陈严 实验日期:2012/5/24
实验目的:学习计算机仿真的方法。
实验内容:1.建立test.py文件,运行test.py,分析实验结果;
2.为每一行代码写一个注释
系统如上图,鼓风机吹出风需要经过阀门才能到达风轮;而风轮的转速会影响到杠杆位置间接影响到阀门开度。
鼓风机的输入为正作用;风轮以至阀门的影响为负作用(或负反馈)。
代码:
#coding=utf-8
#系统参数
a=0.1
b=1.0
#系统结构,F:鼓风机的风力; F1:实际输入风力;W:风轮转速
def WW(): return a*F1 //*每次输入的风力
def FF1(): return F-b*W //*杠杆所得到的力
#初始条件
F1=2 //*实际输入风力为2
W=0.2 //*风轮转速为0.2转每秒
print F1,W //*输入实际风力和转速
#鼓风机风力正常
F=2.2 //*鼓风机的风力为2.2 print "鼓风机风力",F //*输出鼓风机的风力
#随着时间增加
for t in xrange(20): //*返回一个迭代序列
F1,W=FF1(),WW() //*将风力和转速进行更新
print F1,W //*输出更新后的风力和转速#鼓风机风力偏大
F=2.3 //*当鼓风机的风力为2.3时print "鼓风机风力",F
#随着时间增加
for t in xrange(20): //*返回迭代列20次
F1,W=FF1(),WW() //*再次更新
print F1,W //*输出实际风力和转速
#鼓风机风力偏小
F=2.2 //*当风力为2.2时
print "鼓风机风力",F
#随着时间增加
for t in xrange(20): //*在f=2.2时,再次迭代 F1,W=FF1(),WW()
print F1,W
实验结果:
从结果上,风力偏小时,感觉风轮转速W有点振荡;风力偏大时,比较平稳
如果装个matplotlib画个曲线图就更好了风力偏小时,
分析结果:转速是风力F的函数,当感觉风轮转速W有点振荡;风力偏大时,比较平稳
二者之间成正相关。