《自主代客泊车系统总体技术要求》编制说明
停车管理系统设计说明书
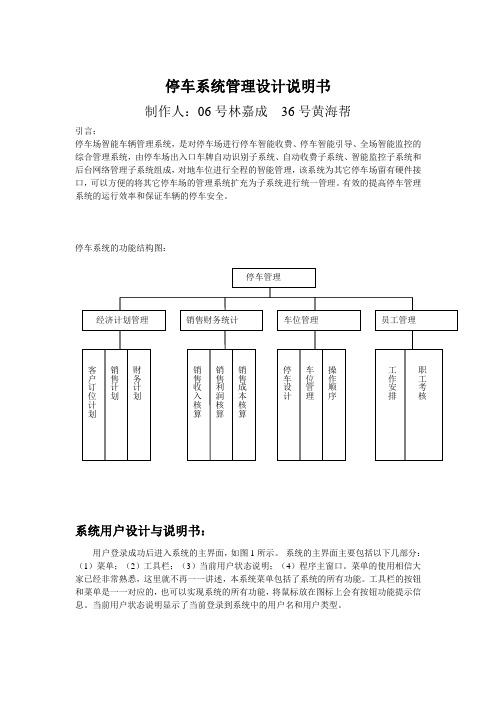
停车系统管理设计说明书制作人:06号林嘉成36号黄海帮引言:停车场智能车辆管理系统,是对停车场进行停车智能收费、停车智能引导、全场智能监控的综合管理系统,由停车场出入口车牌自动识别子系统、自动收费子系统、智能监控子系统和后台网络管理子系统组成,对地车位进行全程的智能管理,该系统为其它停车场留有硬件接口,可以方便的将其它停车场的管理系统扩充为子系统进行统一管理。
有效的提高停车管理系统的运行效率和保证车辆的停车安全。
停车系统的功能结构图:系统用户设计与说明书:用户登录成功后进入系统的主界面,如图1所示。
系统的主界面主要包括以下几部分:(1)菜单;(2)工具栏;(3)当前用户状态说明;(4)程序主窗口。
菜单的使用相信大家已经非常熟悉,这里就不再一一讲述,本系统菜单包括了系统的所有功能。
工具栏的按钮和菜单是一一对应的,也可以实现系统的所有功能,将鼠标放在图标上会有按钮功能提示信息。
当前用户状态说明显示了当前登录到系统中的用户名和用户类型。
默认的主窗口是车辆入场登记窗口,车辆编号由系统自动生成,操作员只需单击【确定】按钮将该信息记录到数据库中即可。
无论添加记录成功或失败,系统都会弹出提示对话框告诉用户添加结果。
图1 主界面——车辆入场登记图2是车辆出场运行界面。
此界面根据编号来查询车辆入场时间,并自动计算消费。
图2 主界面——车辆出场登记图3是出入车辆查询运行界面。
此窗口中可以根据不同条件来查询车辆记录。
进入此页面之前系统会先检验当前用户的权限类型,因为只有高级用户和系统管理员才能查询停车收费记录。
图3 主界面——出入车辆查询选择菜单【系统管理】→【用户管理】,或者单击“用户管理”图标,便可进入用户管理界面。
图4是用户管理运行界面,此时默认窗口是修改密码窗口。
并且在修改密码框架标题栏中显示了当前用户名,只能修改当前用户的密码。
按要求填写原密码和新密码,单击【修改】按钮,系统便会弹出提示框,提示用户修改密码是否成功。
停车场管理系统(软件需求说明书)

停车场管理系统需求规范说明书文档编号文档名称需求规范说明书撰写人审核/批准创建时间目录停车场管理系统 (1)1引言 (4)1.1编写目的 (4)1.2背景 (4)1.3定义 (4)2任务概述 (4)2.1目标 (4)2.2用户的特点 (5)3需求规定 (5)3.1对功能的规定 (5)3.1.1车辆的驶入过程 (5)3.1.2车辆的驶出过程 (6)3.1.4车位信息管理 (7)3.2对性能的规定 (7)3.2.1精度 (7)3.2.2时间特性要求 (8)3.2.3灵活性 (8)4.数据管理能力要求 (8)5.故障处理要求 (8)6.其他专门要求 (8)7. 运行环境规定 (9)1引言《停车场管理系统--需求规范说明书》旨在详细描述系统功能需求和一些非功能需求,明确系统需求边界。
1.1编写目的停车场管理系统需求规格说明书是为了让系统的开发与需求者的需求达成一致认可,明确该系统的需求,为后续的开发工作提供依据。
通常,该需求规格说明可以作为产品设计的主要依据,并作为工程师编码时了解软件实际需求的主要参考资料。
同时,需求规格说明是产品实现后用于检验的主要考察依据,是测试人员编写测试用例时的主要参考文件。
另外,本文档还可以为其他需要了解系统需求的人员提供产品需求的详细说明。
1.2背景开发软件名称:停车场管理系统项目任务提出者:停车场管理者项目开发者:用户:停车人员、停车场管理人员1.3定义2任务概述2.1目标停车场管理系统是针对愈来愈多的车辆进行管理,是对越来越多车辆停靠提供条件。
同时能建立一个全天候自动化停车场管理系统,使停车场管理工作规范化,系统化,程序化,自动化,避免停车场管理的随意性,提高信息处理的速度和准确性,能够及时、准确、有效的查询和修改停车信息情况。
|2.2用户的特点本系统的最终用户有两类:1.管理员:对本系统极其了解,拥有一切对系统添加、修改、删除的权利。
2.停车人员:能够通过本系统进行停车和取车的需求。
汽车-自动泊车辅助系统技术规范
零部件子系统技术规范 自动泊车辅助系统2020年05月24日1前言本文件是根据项目规划,定义了自动泊车辅助系统基本技术要求,用于供应商报价,本文件在供应商定点之前可持续进行更改。
本文件内的信息要求严格保密,未征得同意不得将信息透露给第三方。
2术语及参考文件2.1术语` 英文解释 中文解释BSM Brake System Module 制动系统TCM Transmission Control Module 变速箱控制模块PAS Parking Aid System 泊车辅助系统CLM Climate Module 空调控制系统KL15 Ignition 点火电KL30 Battery 蓄电池电2.2参考规范序号 规范编号 名称1 乘用车高速CAN网络规范2 乘用车高速CAN网络管理规范3 乘用车诊断基础需求规范4 乘用车控制器在线刷新需求规范5 End-of Life Vehicles6 内饰散发特性评价准则7 泊车辅助系统技术标准3设计概念1) CAN BUS通讯应该满足《BQZZS3-XXXX乘用车高速CAN网络规范》,《BQZZS6-XXXX乘用车高速CAN网络管理规范》;2) 诊断功能应该满足《BQZZS5-XXXX 乘用车诊断基础需求规范》,《BQZZS7-XXXX乘用车控制器在线刷新需求规范》;3) 传感器采用内装式,且与车身同色;4)支架及传感器供货到保险杠供应商处,由保险杠供应商装配后总成供货至;5) 采用12传感器系统,可以实现平行泊车、垂直泊车、Park out功能、盲点检测功能。
4零件清单零件名称 自动泊车辅助控制器 泊车辅助传感器 泊车转向辅助传感器 支架零件号 TBD 单车用量 1 8 4 12 5技术要求5.1电气环境要求工作电压范围:9V~16V测试电压: 14 V标称电压: 12VCAN网络工作电压: 6V~16V5.2材料要求泊车辅助控制器、传感器及支架应满足2003/53/EC的要求。
《自主代客泊车场地试验方法及要求》 -回复

《自主代客泊车场地试验方法及要求》-回复《自主代客泊车场地试验方法及要求》是一个关于自主代客泊车场地试验的指导性文件。
该文件旨在规范自主代客泊车试验的方法和要求,以确保试验过程的科学性和有效性。
下面将逐步回答该主题。
第一步:概述自主代客泊车的概念与意义首先,我们需要概述自主代客泊车的概念与意义。
自主代客泊车是指通过自动驾驶技术和智能停车系统,实现无人驾驶车辆为车主代为停放车辆的一种创新型停车方式。
它既可以提高停车的效率和安全性,又能减少人为因素带来的停车问题。
因此,开展自主代客泊车试验具有重要意义。
第二步:确定试验目的与内容其次,我们需要确定自主代客泊车场地试验的目的与内容。
试验目的通常包括验证自动驾驶系统、智能停车系统的性能和可靠性,评估自主代客泊车的效果和安全性等。
试验内容包括试验流程、试验场地选择、试验设备要求等。
第三步:确定试验流程与步骤接着,我们需要确定自主代客泊车场地试验的流程与步骤。
试验流程一般包括准备工作、试验准备、试验过程、数据记录与分析等。
试验步骤需要详细描述试验前的准备工作、试验数据的收集与处理等。
第四步:确定试验场地选择要求然后,我们需要确定自主代客泊车场地试验的选择要求。
试验场地应具备一定规模和布局,以满足试验的需要。
同时,场地应具备可靠的通信网络、合适的地形和道路条件,以保证试验的准确性和安全性。
第五步:确定试验设备要求进一步,我们需要确定自主代客泊车场地试验的设备要求。
试验设备通常包括无人驾驶车辆、智能停车系统等。
这些设备需要具备相应的性能和功能,以支持试验的顺利进行。
此外,还需确定设备的配置和使用要求。
第六步:确定试验数据记录与分析方法最后,我们需要确定自主代客泊车场地试验的数据记录与分析方法。
试验数据的记录可以通过传感器和监测设备来完成,包括车辆轨迹、避障情况、停车准确性等。
试验数据的分析可以通过统计分析和模型计算来完成,以获得试验结果和结论。
通过上述步骤的详细回答,我们可以完成一篇1500-2000字的文章,全面介绍《自主代客泊车场地试验方法及要求》。
《自动驾驶地图采集要素模型与交换格式》报批稿

T/CSAE XX—2021
自动驾驶地图采集要素模型与交换格式
1. 范围
本文件规定了自动驾驶地图中应表达的采集要素、要素数据信息化及数据结构化等内容的要求,具 体包括采集要素数据表达的一般要求、数据组织要求及应用场景等。基础导航电子地图中已有的要素要 求不在本文件中体现。
本文件适用于汽车自动化分级中 3 级(有条件自动驾驶)以上的自动驾驶地图应用。另外,文件中 相关内容也可供汽车自动化分级中 0 级(应急辅助)至 2 级(组合驾驶辅助)地图应用参考。
道路交通标线gbt197112005导航地理数据模型和交换格式gbt284412012车载导航电子地图数据质量规范gbt356462017导航电子地图增量更新基本要求db11t5952008公共停车场工程建设规范dgtj087201建筑工程交通设计及停车库场设置标准tcsae532017合作式智能运输系统车用通信系统应用层及应用数据交互标准tcsae1562020自主代客泊车施设置指南术语和定义gbt576822009gbt576832009gbt197112005gbt284412012gbt356462017db11t5952008dgtj087201tcsae532017tcsae1562020tcts2020界定的以及下列术语和定义适用于本文件
3.1 通用术语......................................................................................................................................................... 1 3.2 测量术语......................................................................................................................................................... 3 3.3 地理数据文件术语.........................................................................................................................................3 4. 总体要求............................................................................................................................................................4 4.1 时空参照系.....................................................................................................................................................4 4.2 数据组织方式.................................................................................................................................................4 4.3 几何位置精度要求.........................................................................................................................................4 4.4 要素来源......................................................................................................................................................... 4 5. 要素表达............................................................................................................................................................4 5.1 要素构成概述.................................................................................................................................................4 5.2 采集场景基本信息.........................................................................................................................................5 5.3 道路交通标志.................................................................................................................................................8 5.4 道路交通标线............................................................................................................................................... 11 5.5 其他道路安全设施物................................................................................................................................... 28 5.6 智能路侧设备............................................................................................................................................... 37 5.7 扩展与自定义............................................................................................................................................... 40 参 考 文 献................................................................................................................................................................ 41
自主泊车系统关键技术研究

自主泊车系统关键技术研究随着科技的不断发展,自动驾驶技术已经成为当今汽车行业的研究热点。
其中,自主泊车系统作为自动驾驶技术的一个重要组成部分,具有广泛的应用前景和实际需求。
本文将重点探讨自主泊车系统的关键技术及其在未来汽车行业中的应用和发展趋势。
自主泊车系统是一种能够自动寻找停车位并将车辆自主停泊入位的智能系统。
它主要由感知系统、决策系统和执行系统三部分组成,涵盖了从车辆感知到停车入位的全过程。
自主泊车系统可以帮助驾驶员缓解在寻找停车位过程中的压力,提高行车安全性,因此具有很高的实用价值。
自主泊车系统涉及的关键技术包括感知技术、决策技术和执行技术。
感知技术主要依靠传感器、摄像头等设备获取车辆周围环境信息,识别可用的停车位;决策技术则是根据感知信息进行停车位搜索、路径规划等操作;执行技术则通过控制系统和驱动装置实现车辆的精确运动控制,完成停车入位操作。
现有的自主泊车系统实现方式主要有两种:一种是基于传感器融合的方案,另一种是基于深度学习的方案。
传感器融合方案通过多种传感器协同工作,提高感知精度和稳定性,但成本相对较高;基于深度学习的方案则通过大规模训练数据提高决策和执行能力,但需要强大的计算资源。
随着自动驾驶技术的不断发展,自主泊车系统的应用前景越来越广阔。
未来,它将不仅仅应用在量产汽车上,还将出现在共享出行、无人驾驶出租车等领域。
同时,随着5G、云计算等技术的发展,自主泊车系统将实现更高效的车联网协同,提升整体行车安全和效率。
为了验证自主泊车系统关键技术的可行性和有效性,我们设计了一系列实验。
我们选取了多种不同环境下进行泊车测试,以验证感知技术的稳定性和准确性;我们对决策技术进行了测试,观察其在不同场景下的路径规划能力;我们针对执行技术进行了评估,包括车辆的加速度、速度以及泊车过程中的抖动等指标。
实验结果表明,自主泊车系统在各种环境下均能够稳定工作,感知技术在不同场景下的准确率达到了90%以上,决策技术能够快速准确地搜索到可用停车位并规划出合理的泊车路径,执行技术在泊车过程中具有良好的稳定性和精确性。
停车场管理系统说明书
停车场管理系统1、概述随着我国社会经济的迅速发展,城市机动车保有量持续增加,但是由于城市停车设施的规划、建设、管理等方面存在不同程度的不足之处,因此机动车停车供需矛盾日益突出和严重,而国内现有的大部分停车场,基本采用人工管理,这就使得许多城市的繁华区、城中商业区等局部区域本就恶劣的的交通环境愈加恶化。
停车管理技术的创新,特别是停车管理技术的信息化和智能化可以为城市静态交通的现代化管理提供先决条件,为政策提供信息依据,为计时收费规范化收费提供技术保障,因此泊车技术的信息化和智能化成为解决目前城市交通停车难困境的一个迫切的要求。
例如西安市在2006年出台了《西安市机动车停车场(库)管理办法》和《西安市人民政府关于印发西安市机动车停放服务收费管理办法的通知》,文中明确规定了停车场管理的制度规范,但受制于现有停车管理的技术条件,到目前为止其中一些规定仍难以有效执行,如计时收费、停车诱导、安全保障等措施,同时这也是本课题所要解决的重点问题。
通过信息技术改造现有停车场,可以达到统筹全城的停车信息,合理调控停车流;精确计时收费,避免违规收费;监控车辆状况,保障停车安全;诱导快捷停车,减少停车等待时间,降低交通污染;提高管理效率,减轻劳动强度等目的。
这时,基于物联网的停车诱导与智能泊车服务平台便应运而生,因此对于停车场内部的车位引导和车位寻找,对于停车场和泊车者都需要有一个服务平台来共享信息,同时可以通过这个服务平台来实现高效的泊车。
对于有限的停车资源我们需要合理地利用,停车场内部停车路线引导系统就是在停车场内部为泊车者提供泊车的相关服务。
本系统包括用户注册、登录、预定车位,以及,停车场区域管理,订单管理等内容。
以保定市车位预订网为例。
2、系统设计2.1 系统功能图2.2 E-R图设计3、系统逻辑结构设计3.1数据关系模式设计如下:(注:加下划线的属性为主码,加粗的为外码)用户信息(编号,用户名,密码)管理员信息(编号,用户名,密码)区域(编号,名称,备注)停车场(编号,名称,车位数量,剩余车位数量,区域编号)订单状态(编号,状态名称)订单(编号,用户编号,停车场编号,开始时间,结束时间,状态编号)3.2 SQL语言创建各表区域信息表:CREATE TABLE Area(Id INT IDENTITY(1,1) PRIMARY KEY, --编号Name VARCHAR(20) NOT NULL, --名称Remark VARCHAR(20) NULL --备注字段,以后备用)停车场表:CREATE TABLE PakingLot(Id INT IDENTITY(1,1) PRIMARY KEY, --主键,编号Name VARCHAR(20) NOT NULL, --名称Amount INT NOT NULL, --停车场额定停车数量NowAmount INT NOT NULL,AreaId INT --外键,表明属于哪个区域FOREIGN KEY(AreaId) REFERENCES Area(Id))管理员表:CREATE TABLE Manager(Id INT IDENTITY(1,1) PRIMARY KEY, --管理员编号ManName VARCHAR(20) NOT NULL, --管理员账号ManPwd VARCHAR(20) NOT NULL --密码)用户表:CREATE TABLE UserInfo(Id INT IDENTITY(1,1) PRIMARY KEY, ---用户编号UserName VARCHAR(20) NOT NULL, --用户名UserPwd VARCHAR(20) NOT NULL, --密码Name VARCHAR(20) NULL, --用户真实姓名IdCardNum VARCHAR(50) NOT NULL, --身份证号Sex BIT NULL, --性别 0女 1男Phone VARCHAR(15) NULL --联系方式)订单表:该表内没有包含车牌号,为了不限制车位所停的车,如果有需要可加上 (因为该系统比较简单,暂时处理成一个订单只能预定一个车位) CREATE TABLE UserOrder(Id INT IDENTITY(1,1) PRIMARY KEY, --编号BeginOrderDate DATETIME NOT NULL, --订单时间EndOrderDate DATETIME NUll,--订单结束时间,不是表示失效时间OrderState INT NOT NULL,--订单状态,暂时有 1未审核 2审核通过 3失效(20分后过期) 4交易成功订单完成 5被取消,即被用户退订UserId INT FOREIGN KEY(UserId)REFERENCES UserInfo(Id),---外键,表明下单用户ParkingLotId INT FOREIGN KEY(ParkingLotId) REFERENCESPakingLot(Id))4、系统实现以保定市为例。
自动泊车系统能力测试与评价规范-征求意见稿编制说明.pdf.pdf

《自动泊车系统能力测试与评价规范》编制说明一、工作简况1.1任务来源《自动泊车系统能力测试与评价规范》团体标准是由浙江省汽车工程学会批准立项。
文件号【2021】7号,任务号为2021-004。
本标准由浙江省汽车工程学会提出,由浙江零跑科技股份有限公司、浙江华锐捷技术有限公司、上海机动车检测认证技术研究中心有限公司、浙江理工大学等单位起草。
1.2编制背景与目标在汽车行业“新四化”(电动化、智能化、网联化、共享化)变革的背景下,自动驾驶汽车已然成为了“中国制造2025”、“人工智能”等国家战略的焦点。
科技部等三部委联合印发的《汽车产业中长期发展规划》要求至2020年自动驾驶汽车与国际同步发展。
发改委《智能汽车创新发展战略(征求意见稿)》要求届时智能汽车新车占比达50%,智能汽车实现市场化应用。
随着智能汽车逐步实现市场化需求的提升,智能汽车的测试及评价迫在眉睫。
目前,自动泊车系统能力基本以企业的自主测试为主。
自动泊车系统能力测试体系及评价标准不完善,自动泊车系统能力的开发需在相关测试及评价标准体系下进行开发。
在此背景下,本标准计划从可泊车位适应性、泊车效率、停车姿态、泊车体验四个维度对具备自动泊车系统的车辆进行测试及评价,构建测试及评价标准统一、结果互认的可复制推广模式。
1.3主要工作过程本标准以企业在开发及测试自动泊车系统能力过程中使用的《自动泊车系统能力测试及评价指导手册》为基准,于2021年4月份提报标准立项建议书;并于2021年5月接收到标准起草任务书正式开启标准制定工作。
2021年6月4日在杭州召开了《自动泊车系统能力测试与评价规范》的标准起草工作的启动会,会议上由浙江零跑科技股份有限公司对本标准的立项背景、标准范围和主要技术内容、实施方案进行了简要介绍,并宣布成立标准起草组,明确相关起草单位的职责。
会议上,由浙江零跑科技股份有限公司对前已现行的《自动泊车系统能力测试及评价指导手册》进行了详细介绍,参与本次起草单位的起草人进行了积极热烈的讨论,收集了相关建议及意见,并完成了本标准的大纲制定,一致认可从可泊车位适应性、泊车效率、停车姿态、泊车体验等四个维度对具备自动泊车系统的车辆进行自动泊车系统能力测试及评价。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《自主代客泊车系统总体技术要求》编制说明一、工作简况1.1 任务来源《自主代客泊车系统总体技术要求》团体标准是由中国汽车工程学会批准立项。
文件号中汽学函【2019】191 号,任务书号为 2019-24。
本标准由中国智能网联汽车产业创新联盟提出,长城汽车股份有限公司、广州汽车集团股份有限公司汽车工程研究院、浙江吉利控股集团有限公司、重庆长安汽车股份有限公司、纵目科技(上海)股份有限公司、驭势科技(北京)有限公司、博世(中国)投资有限公司、法雷奥企业管理(上海)有限公司、北京百度网讯科技有限公司、国汽(北京)智能网联汽车研究院有限公司、北京佐智汽车技术有限公司、禾多科技(北京)有限公司、宁波裕兰信息科技有限公司、北京初速度科技有限公司、中国第一汽车集团有限公司、福特汽车(中国)有限公司、易图通科技(北京)有限公司、北京停简单信息技术有限公司、上海晶众信息科技有限公司、上海喜泊客信息技术有限公司、华为技术有限公司、奥迪(中国)企业管理有限公司、北京汽车股份有限公司、宝马(中国)汽车贸易有限公司、保时捷(中国)汽车销售有限公司、智慧互通科技有限公司、中国信息通信研究院、惠州市德赛西威汽车电子股份有限公司、北京四维图新科技股份有限公司、紫光展锐科技有限公司、通用汽车(中国)投资有限公司、锐捷网络股份有限公司等单位起草。
同时也特别感谢厦门新页集团有限公司、大陆投资(中国)有限公司、南京越博动力系统股份有限公司、日产(中国)投资有限公司湖北汽车工业学院、东风汽车集团有限公司等公司参与反馈沟通。
1.2编制背景与目标自主代客泊车系统(Automated Valet Parking,以下简称 AVP)功能定义:驾驶员从指定下客点通过钥匙或手机 APP 下达指令,车辆可以自动行驶到停车场的停车位,无需驾驶员监控;车辆可以在接收到指令从停车位自动行驶到指定上客点;多辆车同时收到泊车指令,实现动态自动等待进入泊车位。
各单位在 AVP 开发和测试过程中,发现各个停车场之间千差万别,AVP 解决方案不规范、定位和通讯技术不统一,车场云接口迥异等各种标准化问题,无法实现不同智能汽车在同一停车场、或同一智能汽车在不同停车场的自主代客泊车,给AVP的落地带来极大的安全隐患。
因此迫切需要制定相关标准规范,首要目标是提高 AVP系统的安全性,其次是通过规范制定加快 AVP 落地。
本标准组将每年更新一次 AVP 标准,同时不断完善 AVP 细分技术领域的技术标准。
1.3主要工作过程2018 年 12 月 14 日,AVP 标准研究启动会在北京踏歌智行召开,本次讨论会初步完成了 AVP 场景库定义,按障碍物(OBJ)将复杂多样的泊车场景分为七类,每一类场景按照 OBJ 速度、进入行驶区域、OBJ 位置、停车场位置、自车车速、环境等条件再进一步细分。
第二次会议于 2019 年 1 月 21 日在纵目科技(厦门)召开。
第三次会议于2019年 3 月 8 日在上海博世中国总部召开。
AVP 标准初稿的框架讨论完毕。
第四次会议于 2019 年 3 月 22 日在上海银星皇冠假日酒店召开。
第五次讨论会在驭势科技上海公司召开。
主要内容涉及:安全场景章节审核,定位章节审核(含通讯与云),标识章节审核,停车场分类章节审核等。
第六次会议于 2019 年 5 月 31 日在北京亦庄国汽智联召开。
至此完成了AVP标准征求意见稿 1.0 版。
第七次会议于 2019 年 7 月 25 日在 MOMENTA 苏州召开。
讨论了对征求意见稿1.0 版的意见和建议,同时讨论了人机交互(HMI)等内容。
2019 年 8 月,由 AVP 标准组组长陈超卓老师牵头,向汽车工程学会做了AVP 标准征求意见稿 1.0 版工作进展的汇报,汽车工程学会专家组提出了十几条修改意见。
2019 年 9 月 5 日,第八次会议在北京停简单会议室召开。
根据CSAE专家要求,丰富安全场景和测试方法,同时试图统一定位和地图的标准。
停车场扫图成本昂贵,需统一地图扫描方式,做到只扫一次,其他家可用。
第九次 AVP 标准讨论会于 2019 年 10 月 11 日于深圳法雷奥办公室举办。
会上听取了 ISO AVP 标准组专家 Gotzig 先生的报告。
Gotzig 先生介绍 AVP 的全球标准 ISO 23374 AVPS 预计在 2020 年底 2021 年初发布。
中国 AVP 标准组陈超卓老师也向 Gotzig 介绍了中国 AVP 标准的情况。
双方达成资料共享和及时沟通机制。
第十次 AVP 标准讨论会于 2019 年 11 月 22 日在北京百度大厦召开。
主要讨论内容:HMI 章节,AVP 流程图,AVP 测试章节,场景及 SOTIF,定位章节,标识内容,终稿收尾工作安排。
第十一次 AVP 标准讨论会于 2019 年 12 月 17 日在北京国汽智联召开,对征求意见稿 2.0 版进行了集中审核。
2020 年 1 月份完成征求意见稿 2.0 版,并提交中国汽车工程学会和中国通信工业协会。
二、标准编制原则和主要内容2.1标准制定原则在充分总结和比较了国内外自主代客泊车(AVP)的相关标准的基础上,参考了ISO 16787-2016 《智能交通系统辅助停车系统(APS)性能要求和试验规程》(已发布)、ISO 23374-2019《智能交通系统自动代客泊车系统(AVPS)系统框架、交互界面和车辆操作》(编制过程中)。
2.1.1通用性原则本标准提出的自主代客泊车(AVP)系统与通信技术标准同时适用于单车端方案、单场端方案以及车场结合方案,通用性高。
2.1.2指导性原则本标准提出的自主代客泊车(AVP)系统与通信技术标准,对于业界 AVP 产品的开发与应用具有指导作用。
目前国内外针对自主代客泊车(AVP)产品的标准较少,而本标准率先联合业内各方专家,实现了对自主代客泊车(AVP)系统与通信技术标准的深入研究与制定。
2.1.3协调性原则本标准与目前国内外发布的与泊车相关的标准协调统一,互不冲突。
2.1.4兼容性原则本标准制定过程中充分考虑了业内各类方案,标准提出的AVP 系统与通信技术均具有普遍适用性。
2.2 标准主要技术内容本标准总共分为 7 章,规定了自主代客泊车(AVP)系统的总体技术规范与测试要求。
主要技术内容包括对 AVP 系统典型架构和安全场景的定义,对不同技术路线AVP 系统定位、感知和地图的要求,对 AVP 系统人机交互、云平台和运动控制的功能要求,以及 AVP 系统的测试环境和规程要求。
2.3关键技术问题说明本标准中涉及到的关键技术问题主要包括AVP 系统的安全场景设计、定位功能要求、高精地图数据规范要求以及感知功能要求。
其中安全场景设计主要综合考虑中国停车场的典型交通场景,尤其充分考虑了停车场内的行人安全要求;定位功能要求主要综合考虑三类技术路线的差异和车辆控制需求,提出了不同技术路线的定位方式要求和定位精度要求;高精地图数据规范主要综合考虑车辆定位、路径规划与云平台功能需求,明确了地图的构成要素和数据结构;感知功能主要综合考虑三类技术路线的差异和车辆控制需求,提出了不同技术路线的感知对象类别和精度要求。
2.4标准主要内容的论据本标准中系统定义章节主要依据现有AVP 系统的三类技术路线进行提炼;系统应用场景章节主要依据中国停车场典型交通场景进行提炼;系统总体技术规范章节主要依据 L4 级自动驾驶对定位、感知和高精地图的技术要求,以及车路协同系统对平台、通信和基础设施的技术要求进行研讨论证后提出;系统总体测试要求章节主要结合自动驾驶道路测试规定以及停车场交通场景特征进行研讨论证后提出。
2.5标准工作基础本标准工作基础主要包括 ISO 16787-2016 《智能交通系统辅助停车系统(APS)性能要求和试验规程》(已发布)、ISO 23374-2019《智能交通系统自动代客泊车系统(AVPS)系统框架、交互界面和车辆操作》(编制过程中),以及博世中国、纵目科技、驭势科技、禾多科技、Momenta、停简单和易图通等单位的AVP 系统研发和测试示范经验。
三、主要试验(或验证)情况分析无。
四、标准中涉及专利的情况无。
五、预期达到的社会效益、对产业发展的作用的情况当前中国泊车市场存在巨大的未满足需求,据调研约 60%的用户在泊车上存在“找车位难、等待时间长、停车难”等强烈痛点,因此自主代客泊车(AVP)应运而生,被认为将是自动驾驶最快落地的场景。
自主代客泊车(AVP)不仅将为用户节省决超过30%的驾驶时间,切实解决用户诸多泊车痛点,同时也可以大幅度提升停车场空车位的利用率。
目前,大部分车企和自动驾驶方案公司对自主代客泊车(AVP)均有布局,但由于各种技术标准和接口不统一,整个行业缺少统一的标准制定,AVP 无法实现落地推广。
本标准的发布不仅填补了国内在 AVP 行业标准方面的空白。
同时也实现了自主代客泊车(AVP)多种方案的兼容,使得不同品牌车辆、不同AVP 方案、不同类型停车场,皆可实现自主代客泊车(AVP)的方案落地,能够更好地优化业内的良性竞争、促进市场发展、共同推进自主代客泊车(AVP)的落地实现。
六、采用国际标准和国外先进标准情况,与国际、国外同类标准水平的对比情况,国内外关键指标对比分析或与测试的国外样品、样机的相关数据对比情况本标准中对 AVP 系统的架构、分类、部分功能要求和测试要求与 ISO 23374 标准编制制组专家进行了讨论并达成一致。
由于 ISO 23374 尚在编制过程当中,所以并未直接采用此标准。
七、在标准体系中的位置,与现行相关法律、法规、规章及相关标准,特别是强制性标准的协调性本标准符合国家有关法律、法规和相关强制性标准的要求,与现行的国家标准、行业标准相协调。
八、重大分歧意见的处理经过和依据尚无。
九、标准性质的建议说明本标准为中国汽车工程学会标准,属于团体标准,供协会会员和社会自愿使用。
十、贯彻标准的要求和措施建议标准自公布实施后,应尽快组织标准宣贯。
标准一经发布,建议各方按照标准中规定的各项内容执行,共同推进自主代客泊车(AVP)的标准化工作。
十一、废止现行相关标准的建议无。
十二、其他应予说明的事项无。
标准起草工作组2020年4月16日。