管道修复机器人可控点修复系统
浅谈地下管道非开挖修复技术

浅谈地下管道非开挖修复技术发布时间:2023-02-17T02:30:57.362Z 来源:《中国建设信息化》2022年10月19期作者:王永杰[导读] 旧城区市政排水管道随着时间的推移而不断老化,大部分地下排水管道采用深埋,采用传统的开挖修复工艺修复病害管道,势必造成其他地下管线、路面及其他市政道路相关配套设施的破坏,因此管道非开挖修复技术在排水管道修复领域的运用势在必行。
王永杰内江市市政设施建设管护中心四川省内江市东兴区 641000摘要:旧城区市政排水管道随着时间的推移而不断老化,大部分地下排水管道采用深埋,采用传统的开挖修复工艺修复病害管道,势必造成其他地下管线、路面及其他市政道路相关配套设施的破坏,因此管道非开挖修复技术在排水管道修复领域的运用势在必行。
关键词:管道病害,管道检测,非开挖修复技术;一、市政排水管道常见病害类型管道修复前需明确管道的病害类型,需由建设单位或管护单位委托管道检测单位对病害管道进行检测,检测单位针对管道不同的病害类型以及病害程度进行分级,方便后期管理养护单位或项目建设单位针对不同病害类型进行修复。
管道病害一般分为结构性缺陷和功能性缺陷。
(一)功能性缺陷沉积:杂质在管道底部沉淀淤积。
结垢:管道内壁上的附着物,常见于污水管道。
障碍物:管道内影响过流的阻挡物。
残墙、坝根:管道闭水试验时砌筑的临时砖墙封堵,试验后未拆除或拆除不彻底的遗留物。
树根:单根树根或是树根群自然生长进管道。
浮渣:管道内水面上的漂浮物。
(二)结构性缺陷破裂:管道的外部压力超过自身的承受力致使管道发生破裂。
其形式有纵向、环向和复合3种。
变形:管道受外力挤压造成形状变异。
腐蚀:管道内壁受侵蚀而流失或剥落,出现蜂窝麻面或露出钢筋,常见于污水管道或雨污合流管道。
错口:同一接口的两个管口产生横向偏差,未处于管道的正确位置。
起伏:管道未形成定向的排水方向,起伏不定,在低洼处形成洼水。
脱节:两根管道的端部未充分接合或接口脱离。
管道机器人控制及通讯系统和管道检测共3篇

管道机器人控制及通讯系统和管道检测共3篇管道机器人控制及通讯系统和管道检测1管道机器人控制及通讯系统和管道检测管道机器人控制是指使用控制系统控制管道机器人的运动、操作等行为,使其能够在管道内完成各种任务。
管道机器人通讯系统则是指管道机器人与外部设备或中央控制系统之间的通讯方式,以便实现远程监控和数据传输等功能。
管道检测是指使用各种工具和设备,对管道进行检测、评估和监测,以找出管道内的问题和隐患,以及及时进行维修和保养。
管道机器人控制系统主要分为硬件和软件两部分。
硬件主要包括电机、传感器、阀门、液压系统、机器人外壳、控制面板等。
软件主要是控制系统的软件程序,它可以控制机器人的运动、操作、状态等。
电机是管道机器人完成各种动作的驱动力,传感器可以实现对环境的感知与控制,阀门用于控制管道内的流量和压力,液压系统可以驱动机器人的动作和操作,机器人外壳可以保护机器人的安全和稳定性,控制面板是人机交互的中心,可以实现对机器人的远程控制。
管道机器人的通讯系统主要包括,数据采集、数据存储、数据传输以及远程监控等方面。
数据采集可以通过传感器和控制系统来实现。
数据存储可以在机器人内部的存储设备中实现,也可以通过无线云端的方式进行存储。
数据传输可以通过有线或者无线等通讯方式实现,远程监控可以通过网络或者云端进行实现。
管道检测是指利用工具或设备,对管道进行检测和监测,以找出管道内的问题和隐患,及时进行维修和保养。
管道检测的主要方法包括:摄像头检测、超声波检测、磁探测等方法。
摄像头检测是指在机器人上搭载摄像头,利用其进行拍摄和检测。
超声波检测是利用超声波探头,对管道内部和外部进行探测和检测。
磁探测可以检测管道内或者表面上的磁性材料,判断管道内是否存在隐患或者故障。
以上内容是管道机器人控制及通讯系统和管道检测方面的简单介绍,管道机器人的相关技术还有很大的研究空间和发展潜力。
随着社会的不断发展和进步,管道机器人技术将得到进一步应用和推广,为人们的生产生活带来更多的便利和舒适。
管道机修复机器人的管道CCTV检测的基本方法步骤
管道CCTV检测机器人,不知道大家用过没有,对于管道CCTV检测机器人的管道CCTV检测的基本方法步骤了解多少?但是如果你真的想要了解管道CCTV检测机器人的话一定要看这篇文章哦。
小编会给大家详细的讲述一下管道机修复机器人的管道CCTV检测的基本方法步骤。
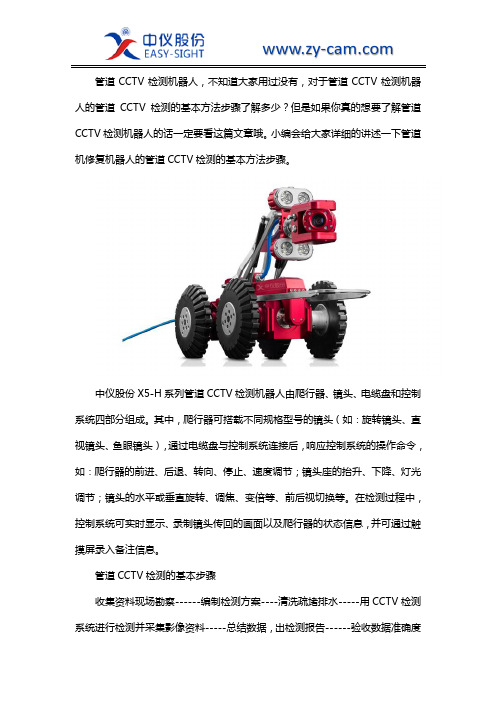
中仪股份X5-H系列管道CCTV检测机器人由爬行器、镜头、电缆盘和控制系统四部分组成。
其中,爬行器可搭载不同规格型号的镜头(如:旋转镜头、直视镜头、鱼眼镜头),通过电缆盘与控制系统连接后,响应控制系统的操作命令,如:爬行器的前进、后退、转向、停止、速度调节;镜头座的抬升、下降、灯光调节;镜头的水平或垂直旋转、调焦、变倍等、前后视切换等。
在检测过程中,控制系统可实时显示、录制镜头传回的画面以及爬行器的状态信息,并可通过触摸屏录入备注信息。
管道CCTV检测的基本步骤收集资料现场勘察------编制检测方案----清洗疏堵排水-----用CCTV检测系统进行检测并采集影像资料-----总结数据,出检测报告------验收数据准确度---提交评估报告。
1、管道检测前搜集的资料如下:该管线平面图。
该管道竣工图等技术资料。
已有该管道的检测资料。
2、现场勘察资料如下:a) 、察看该管道周围地理、地貌、交通和管道分布情况。
b) 、开井目视水位、积泥深度及水流。
c) 、核对资料中的管位、管径、管材。
3、确定检测技术方案:a)、明确检测的目的、范围、期限。
b) 、针对已有资料认真分析确定检测技术方案包括:管道如何封堵、管道清洗的方法、对已存在的问题如何解决、制定安全措施等。
4、管道竣工验收检测前技术要求:a) 、应将管道进行严密性试验,并向检测人员出示该管道的闭气或闭水的试验记录。
b) 、检测前应确保管道内积水不超过管径的5%。
c) 、检测开始前必须进行疏通、清洗、通风及有毒有害气体检测。
那么,管道CCTV检测机器人应该在哪购买呢?大家知道么?现在小编给大家推荐一家专业做管道CCTV检测机器人的公司:武汉中仪物联技术股份有限公司。
城市管道清淤机器人

水下履带清淤机器人
• 河北五星电力设备有限公司的地下管道清淤机器人(水下履带清淤机器人)对 淤积严重、人又无法进入的管道进行清淤,可通过计算机控制的视频探头对管道 内壁的破损处进行探查,运用专业技术对淤积垃圾进行清除,短时间就可以全面 完成,河北五星电力设备有限公司的地下管道清淤机器人(水下履带清淤机器人) 清淤效果显著。我国很多城市地下管道、地下雨污水管道和排水渠、暗渠都在使 用河北五星电力设备有限公司的地下管道清淤机器人(水下履带清淤机器人)清 淤疏通和修补工程。 • 地下管道清淤机器人(水下履带清淤机器人)工作人员告诉我们,由于市政管 网多年未能维护,有的2米管径的市政管道已经淤积了0.5m-1m厚度的淤泥,而 且很多旧的管道是雨污合流的,一旦下雨或水流量较大的时候,容易造成堵塞, 市内积水严重,河北五星电力设备有限公司的地下管道清淤机器人(水下履带清 淤机器人)清淤排障可靠性高,清淤安全效果好!
市政管道清பைடு நூலகம்机器人
• 河北五星电力设备有限公司的地下管道清淤机器人(水下履带清淤机器人)可 牵引吸污车吸污管口径:200mm • 最大杂质颗粒 100mm • 输送距离 150M • 泵送能力:100m³ /h • 水上控制系统: • 河北五星电力设备有限公司的地下管道清淤机器人(水下履带清淤机器人)显 示器:显示器采用19寸LED高亮液晶显示器,亮度不低于800, 屏显时间/日期, 电脑主机 电脑采用I5主机,硬盘容量1T,128GB SSD固态硬盘,路径生成, 具有座标记录功能,记录取样GPS坐标,并可生成行驶路径,有视频叠加功能, 可叠加用户图标,日期时间,GPS参数,深度,温度 • 电压功耗 系统输入电压380V; 最大功耗20KW内 • 控制台:采用防水机箱设计,显示器装有可拆卸遮阳罩 • 控制手柄:采用工业级控制手柄 • 河北五星电力设备有限公司的地下管道清淤机器人(水下履带清淤机器人)可 以有效解决市政、污水、供排水、工矿企业、居民小区地下管道疏通难的大问题! 是推动地下管道清淤机械和技术的一场“革命”,
管道清淤机器人功能简介课件

02 管道清淤机器人功能
管道检测
检测管道内部状况
管道清淤机器人搭载高清摄像头和传感器,能够实时传输管道内部的图像和数 据,检测管道的破损、堵塞、沉积物等情况。
识别障碍物
机器人通过智能识别技术,能够检测并标识管道内部的障碍物,如砖块、石块 、塑料等,为后续清淤工作提供参考。
自动清淤
பைடு நூலகம்高效清淤
机器人具备强大的清淤能力,通过高压水枪或机械臂等设备,能够快速清理管道 内的沉积物和堵塞物,恢复管道通畅。
管道清淤机器人功能 简介
目录
CONTENTS
• 机器人概述 • 管道清淤机器人功能 • 管道清淤机器人优势 • 管道清淤机器人案例展示 • 未来展望
01 机器人概述
定义与特点
定义
管道清淤机器人是一种专门用于 清理管道内淤泥、杂物和堵塞物 的自动化设备。
特点
具备高效、安全、环保等优点, 可替代传统的人工清淤方式,提 高作业效率和安全性。
材料科学应用
利用新型材料和复合材料,提高机器人的耐磨、耐腐蚀性能。
应用领域拓展
市政排水系统
将管道清淤机器人应用于城市排水管道,提高排水系统的维护效 率。
工业管道清淤
将机器人应用于石油、化工等行业的管道清淤作业,降低人工清淤 的风险。
农业灌溉系统
拓展管道清淤机器人在农业灌溉管道的应用,提高灌溉系统的维护 水平。
和生态环境。
特点
02
具备大范围覆盖、高效清淤、环保无污染等优势,同时可进行
水下监测和数据收集。
应用效果
03
提升水质,改善生态环境,促进水资源的可持续利用。
05 未来展望
技术创新与升级
新型驱动技术
CCTV检测修复管网工程专项施工方案图文并茂

已建污水管网修复工程5.3.10.1概述对县城区、荻港镇、新港镇、孙村已建污水管网进行CCTV检测修复、管道清淤及管道修复工作。
其中管道CCTV检测长度为78445.21m,管道清淤量为10138.1m3,管道修复 26673.6m。
5.3.10.2综合排查技术手段目前,管道排查技术主要有:管道机器人、管道潜望镜以及声呐等方法。
下面就三种方法作简要介绍。
(1)管道CCTV检测机器人管道CCTV检测机器人系列产品属于新一代数字高清型管道CCTV检测机器人,管道机器人代替人员进入城镇排水管道内部,进行电视成像精细检查,一键生成符合行业标准规范的检测评估报告,为制定养护、修复方案提供重要分析依据和指导建议。
管道CCTV检测机器人系统图管道机器人由操作爬行车、线缆盘、摄像机、无线操控盒、计算机控制器组建组成,通过探测可判断管道的质量优劣,发现管道内壁裂缝,接口缺陷及旧管道的腐蚀情况,及辅助完成管道破损内衬修复等。
该车在排查过程中,由计算机系统操控,可杜绝以往因检查管道人员下井作业造成的伤亡事故。
该技术具有科学性,准确性,安全性。
1)管道清淤为了能清楚地了解管道内部的实际情况,对于需要排查的管道内部的水位在管道直径的20%以下才能进行。
所以在实施检查之前,需要先对管道进行封堵、疏通、清淤和排水,然后实施管道机器人检测。
2)管道机器人检查功能特点通过管道机器人在现场发现问题,立即暂停录像。
抓拍缺陷图片,系统自动弹出缺陷描述对话框,进行缺陷选择并描述。
抓拍完成后结束暂停,恢复正常检测录像。
后期制作报告时不用再次进行缺陷判读。
检查过程记录缺陷和缺陷描述爬行车体内置倾角传感器,在管道内部行走时同时采集管道内部的坡度,最后根据采集的数据,软件自动绘制纵向起伏图,以此来判断管道的排水流畅性。
同日的并M <E 又居9.?1的泮S^G.TBDDD^Gh)7, Dftl 6.13也纪一.加排水管道翻向起伏剖面图管民编号 H "比 检渊贴. 可丽背嗣-田寮日检涡I 方向二 管道宜.役山XEjjU m 管道材料陶菽士营-1.23 7.2T 民期直必 IM - UR IM 9. T2 Lk 密T5E - 距蕾ST -1 Li排水管道纵向起伏剖面图缺陷界面例图(2)管道潜望镜管道潜望镜主要用于管道内部情况的快速检测诊断。
CIPP紫外光固化修复系统
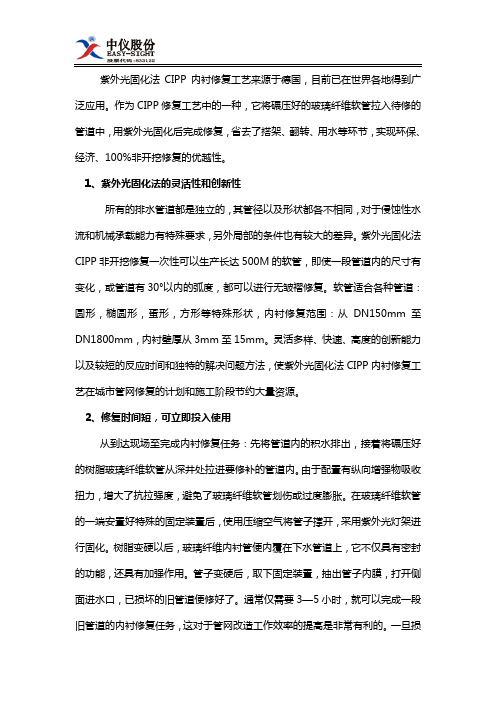
紫外光固化法CIPP内衬修复工艺来源于德国,目前已在世界各地得到广泛应用。
作为CIPP修复工艺中的一种,它将碾压好的玻璃纤维软管拉入待修的管道中,用紫外光固化后完成修复,省去了搭架、翻转、用水等环节,实现环保、经济、100%非开挖修复的优越性。
1、紫外光固化法的灵活性和创新性所有的排水管道都是独立的,其管径以及形状都各不相同,对于侵蚀性水流和机械承载能力有特殊要求,另外局部的条件也有较大的差异。
紫外光固化法CIPP非开挖修复一次性可以生产长达500M的软管,即使一段管道内的尺寸有变化,或管道有30°以内的弧度,都可以进行无皱褶修复。
软管适合各种管道:圆形,椭圆形,蛋形,方形等特殊形状,内衬修复范围:从DN150mm至DN1800mm,内衬壁厚从3mm至15mm。
灵活多样、快速、高度的创新能力以及较短的反应时间和独特的解决问题方法,使紫外光固化法CIPP内衬修复工艺在城市管网修复的计划和施工阶段节约大量资源。
2、修复时间短,可立即投入使用从到达现场至完成内衬修复任务:先将管道内的积水排出,接着将碾压好的树脂玻璃纤维软管从深井处拉进要修补的管道内。
由于配置有纵向增强物吸收扭力,增大了抗拉强度,避免了玻璃纤维软管划伤或过度膨胀。
在玻璃纤维软管的一端安置好特殊的固定装置后,使用压缩空气将管子撑开,采用紫外光灯架进行固化。
树脂变硬以后,玻璃纤维内衬管便内覆在下水管道上,它不仅具有密封的功能,还具有加强作用。
管子变硬后,取下固定装置,抽出管子内膜,打开侧面进水口,已损坏的旧管道便修好了。
通常仅需要3—5小时,就可以完成一段旧管道的内衬修复任务,这对于管网改造工作效率的提高是非常有利的。
一旦损坏的管道在进行内衬修复作业后,马上就可以投入运行,这一工艺特点深受业主部门认可。
3、与翻转法CIPP修复工艺的对比与传统的聚酯针刺毡软管用热水固化工艺相比:紫外光固化工艺现场无需水源,设备操作简单,固化时间短。
管道机器人的概况
管道机器人的概况引言管道机器人是指能够在管道内进行巡检、维修和清理等作业的机器人。
随着工业化进程的加快和管道设施的不断增加,传统的人工操作方式已经无法满足管道作业的需求。
因此,管道机器人应运而生,成为管道工程领域中一种重要的技术手段。
管道机器人的分类管道机器人根据其功能和特点,可以分为以下几类:1.巡检机器人:巡检机器人主要用于检测管道内部的故障和异常情况。
它配备有多种传感器,可以实时监测管道的温度、压力、流速等参数,并将这些数据传输给操作人员进行分析和处理。
2.维修机器人:维修机器人主要用于修复管道故障。
它拥有强大的机械臂和工具,可以进行管道的焊接、切割、补漏等维修作业。
同时,维修机器人还具备精确定位和遥控操作功能,可以在狭小的管道内完成复杂的维修任务。
3.清洁机器人:清洁机器人主要用于清理管道内的杂物和积垢。
它配备有高压喷水装置和刷盘装置,可以将管道内的污物冲刷清洁,提高管道的流量和通畅度。
4.安检机器人:安检机器人主要用于检测管道内是否存在危险品或其他安全隐患。
它配备有气体传感器和摄像头等设备,可以实时监测管道内的气体浓度和图像情况,确保管道的安全运行。
管道机器人的工作原理管道机器人通常由机械结构、传感器、控制系统和电源等组成。
其工作原理可以分为以下几个步骤:1.导航定位:管道机器人会通过激光传感器或者摄像头等设备,获取管道内部的地形和障碍物信息,并根据此信息进行导航和定位。
同时,它还可以利用惯性导航、全球定位系统等技术手段进行精确定位。
2.数据采集:管道机器人会通过传感器获取管道内部的各种数据信息,包括温度、压力、流速、气体浓度等参数。
这些数据会被实时传输到控制系统中进行处理和分析,以便操作人员进行决策。
3.作业执行:根据任务需求,管道机器人会配备不同的工具和装置,进行巡检、维修或清洁等作业。
它可以利用机械臂、刷盘装置、喷水装置等工具,完成各种复杂的作业任务。
4.远程监控:管道机器人通常可以与远程监控中心进行联网,将作业情况实时传输给操作人员。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
城市管道机器人是一种可沿细小管道内部或外部自动行走、携带一种或多种传感器及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统。
管道修复机器人分为管道检测系列,管道养护系列,管道修复系列三大类。
下面就管道修复系列的管道机器人系统为您做详细讲解。
管道修复机器人,便携式光固化管道修复系统由移动式控制系统、传输电缆、紫外光灯架、高清镜头及辅助工具等组成。
主要适用于市政管网非开挖修复工程,修复管径DN200-DN1600。
X120-D可控点位修复系统,可控点位修复系统主要由主控系统和气囊两部分组成,其主要的特点是高效、稳定、精准、可控,8分钟可修复一个破损点。
这款管道修复机器使用于市政(工业)排水管道。
主要用于排水管道点位缺陷点的修复,根据不同的管径选择规格对应的气囊,对破损点进行精准的修复。
X120-UV便携式光固化修复系统,由移动式控制系统、传输电缆、紫外光灯架、高清镜头及辅助工具等组成。
主要适用于市政管网非开挖修复工程,修复管径DN200-DN1600。
体积小、重量轻、外接发电机即可工作;同时又可与车辆分离,在狭小街道作业。
管道机器人之便携式光固化修复系统产品特点如下:
1. UV灯架
2.发光效率高,是传统灯管3倍以上,冷光源,无热辐射。
3.无红外辐射,无有害气体产生符合ROHS标准,无炸裂飞溅,更安全环保;
4.采用LED点阵光源、模块化集成固定、免拆装、寿命长、低功耗、快捷安全;操作系统
5.智能式操作系统,修复过程可视,前后视双高清视频,自动恒压,操作简单,易学易用;
6.控制主机,采用可移动式控制柜,高度集成,内置风机,体积小巧,轻便易携,整机体积和重量约为传统设备的1/2至1/3;
以上是关于管道机器人可控点修复系列产品的相关介绍。
武汉中仪物联技术股份有限公司是一家以排水管网检测、评估、养护、修复相关技术、设备及材料研发制造为核心产业的高新技术企业,专注于为城市提供智慧排水管网运维信息化整体解决方案。
更多关于管道机器人的问题欢迎来电咨询交流。