曲柄连杆机构运动学
曲柄连杆机构运动学
(2)均匀转动的曲拐
(3)平面运动的连杆组
10
2. 连杆的质量换算
二质量系统
三质量系统
11
二质量系统
m1 ml (l l ) / l m2 ml l / l
等效原则: •质量相等 •质心重合 •转动惯量相等
12
5
4.1.2 曲柄连杆机构受力分析
一、气体作用力
二、惯性力
三、零件的受力分析
6
一、气体作用力
1、气体作用力
pg
Fg
D2
4
( pg p )
'
p′
f g pg p'
7
2、缸内压力
8
二、惯性力
曲柄连杆机构的运动及质量换算
往复惯性力 旋转惯性力
9
1.曲柄连杆机构的运动
3.往复质量和往复惯性力 (1)往复运动质量
mj mp m1
(2)往复惯性力
mj r2 cos cos 2 Fj mj x
a
13
4. 旋转质量与惯性力
(1)旋转质量
mr mc m2
mc (1/ r)mi ri
(2)离心力
Fr mr r
' 1
法向力:
F F1 cos
F cos( ) Fn F cos( ) cos
' 1
17
4、发动机的转矩
Fr sin( ) T F r t cos
18
5、倾覆力矩
Tk Fc h T
r sin( ) sin
《曲柄连杆机构》课件
在曲柄连杆机构中,活塞在气缸内进行往复运动,由于连杆的摆动,使得活塞的直线运 动转变为曲轴的旋转运动。在这个过程中,曲轴的旋转运动将能量输出,驱动车辆或其 他机械运动。曲柄连杆机构的特点在于其能够将活塞的往复运动转变为旋转运动,从而
实现能量的高效转换。
分类与应用
总结词
曲柄连杆机构有多种分类方式,如按照曲轴 的形状可分为直列式和V型式,广泛应用于 汽车、摩托车等动力机械中。
缸体的材料选择也很重要,通常采用高强度合金钢或不锈钢制造,以提高其使用寿 命。
03
曲柄连杆机构的工作特性
运动特性
曲柄连杆机构是发动机中的重要 机构,它将活塞的直线运动转化 为曲轴的旋转运动,实现发动机
的做功过程。
曲柄连杆机构的运动特性包括曲 轴的旋转运动、活塞的往复直线
运动以及连杆的摆动运动等。
优化方法
采用数学建模、数值分析和计算机仿 真等方法进行优化设计。
优化流程
建立曲柄连杆机构的数学模型→确定 优化变量和约束条件→选择合适的优 化算法→进行优化计算→分析优化结 果→改进设计。
优化实例与结果分析
优化实例
以某实际应用的曲柄连杆机构为例,进行优化设计。
结果分析
通过对比优化前后的性能指标,分析优化效果。例如,运动性能提升、能耗降 低、振动减小等。同时,对优化后的曲柄连杆机构进行实验验证,确保优化结 果的可靠性和实用性。
05
曲柄连杆机构的常见问题与维护
常见问题与原因分析
01
02
03
04
曲柄连杆机构异响
由于润滑不良、装配间隙不当 或零件疲劳损坏等原因,可能 导致或曲轴轴瓦材料疲劳 极限较低可能导致曲轴轴瓦烧 蚀,影响曲柄连杆机构的正常 运转。
曲柄连杆机构的运动与受力分析讲解学习
定义“曲拐当量质量”为:
则: Prqmqdr2
mqdmqx2mqbrb
如果曲拐的某一曲柄臂上设有平衡重,其质量为 m p ,而其质心
距曲轴轴线的距离为 p ,则平衡重的旋转惯性力为:
Prpmpp2r2mprp
定义“平衡重当量质量”为:
mpd
mp
p
r
(1-32)
则: Prpmpdr2 (1-33)
(2)活塞速度:在0 ºCA~90 ºCA之间和 270 ºCA~360 ºCA之间,活塞速度各出现 一个正极值和负极值。 (3)活塞加速度:在上止点前后活塞加 速度是正值,方向是活塞下行的方向,往 复惯性力朝上;在下止点前后活塞加速度 是负值,方向是活塞上行的方向,往复惯 性力朝下。根据极值方法求解,可得:
1.2.2.2 单个曲拐的旋转惯性力
曲轴上曲柄不平衡部 分的质量分为两部分:
(1)曲柄销部分:
图1-10 单曲拐的旋转惯性力
Prxmqxr2 (1-28)
(r为曲柄半径)
(2)曲柄臂部分: Prbmqbb2 (1-29)
( b 为曲柄臂质心至曲轴轴线的垂直距离)
整个曲拐的旋转惯性力就是:
P rq P rx 2 P rb r2 m q x2 m qbrb
由式(1-3)知:
arc s i(n1-12)
极值: e arcsin角速度: l Nhomakorabead
dt
cos cos
cos 1 2 sin 2
1 (1-13)
2
角速度极值:le
角加速度:l d d l t c s i o n d d s tc o c s s2 o i n s d d t
1.2.2.3 连杆的惯性力
第九章-曲柄连杆机构动力学分析
Pj m j a m j R 2 cos m j R 2 cos2 PjI PjII
(2)、旋转惯性力Fr=mrRω2 2、沿气缸中心线的总作用力F 总作用力F是缸内气体作用力Fg与往复惯性力的代数和 F=Fg+Fj 气体作用力 D 2 Fg p g - p? g 4
1、活塞位移x:
x ( L R) ( L cos R cos )
2 2
R(1 cos ) L(1 1 sin )
(精确式)
R x R(1 cos ) (1 cos 2 ) x I x II (近似式) 4
近似式与精确式相比误差很小,如当λ =1/3.5时,曲柄转角为 90度时误差为最大,在0.003R左右,此精度在工程上已足够。
பைடு நூலகம்
(精确式)
1 2 L sin 1 1 3 cos2 (近似式) 2
2
在α =90º 或270º 时达到极值:
Le
2 (1 2 )1 / 2
(精确式)
1 (近似式) 2 摆动角速度和角加速度精确式中分母均近似等于 1 ,因此两者均 随α 近似按简谐规律变化。
L L 1 m j m p m 1 m p m l L 作旋转运动的不平衡质量mr,包括曲柄换算质量mk和连杆换算
L1 mr mk m 2 mk1 2mk 2 mL R L
到大头中心的质量m2,集中作用于曲柄销中心,即
三、曲柄连杆机构作用力和力矩 1、惯性力 、 (1)旋转惯性力 (1)、 往复惯性力
2、活塞速度:
sin( ) v R cos
发动机曲柄连杆机构运动及动力特性分析与仿真
第 一种情 况 : 当
时,活 塞加速 度在 曲
4
轴转 动 一 圈的范 围 内有两 个 极值 : 在 , 0 处 , = 。 即上 止 点处 , 塞加速 度 极大 值为 : 活
作 者简 介 :李鹏 (9 6 )男 ,在 读硕 士 ,主要 研 究方 向 为内燃 机动 态 设计 。 18 -
( 5 )
结 合() 分析 :速度 1对 曲轴 转角 作一 次 4式 ,
Va≈+ c /+ 2,其所在位置 ( 表 示 , x Ro 1 2 x v) m
图 1 曲柄 连 杆 机 构 简 图
、 .
x = a ccos— r
/+—2 — 8 —1 1 2
—
发 动机 曲柄连 杆 机 构 由活塞 组 、连 杆 组和 曲 轴 组三 大 部分 组成 。 1 图 是正 置式 曲柄 连杆 机构 运
机 电技术
21 年 6 01 月
a =R o(+2 c 1 )
Байду номын сангаас
() 6
,
一
( ) +
() 8
在 ,=10 处 ,即下 止 点处 ,活塞 加速度 极 小值 8。
1 连杆 运 动学分 析 . 2
为:a, R o (一 =一 c 1 )
1
() 7
= ・ D () 9
速度 近似 式代 入 ,可 得 曲柄连 杆机 构 的往 复惯 性
力为:
= m, c ( S ̄ cs a - R o C O+2 o 2 ) O
一
4
结合 () 分析 :活 塞加 速度 极值 的大 小及 位 5式 置有 两 种情 况 :
1
动和动力分析简图,其 中活塞组和连杆小端沿气 缸 中心 线 做往 复 直线 运 动 , 曲轴组 和连 杆 大端 作 回转运 动 。运 动 过程 中 ,各 部 件 的速度 和 加速 度
曲柄连杆机构运动学仿真
课程设计任务书目录1 绪论 (1)1.1CATIA V5软件介绍 (1)1.2ADAMS软件介绍 (1)1.3S IM D ESIGNER软件介绍 (2)1.4本次课程设计的主要内容及目的 (2)2 曲柄连杆机构的建模 (3)2.1活塞的建模 (3)2.2活塞销的建模 (5)2.3连杆的建模 (5)2.4曲轴的建模 (6)2.5汽缸体的建模 (8)3 曲柄连杆机构的装配 (10)3.1将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10)4 曲柄连杆机构导入ADAMS (14)4.1曲柄连杆机构各个零部件之间运动副分析 (14)4.2曲柄连杆机构各个零部件之间运动副建立 (14)4.3曲柄连杆机构导入ADAMS (16)5 曲柄连杆机构的运动学分析 (17)结束语 (21)参考文献 (22)1 绪论1.1 CATIA V5软件介绍CATIA V5(Computer-graphics Aided Three-dimensional Interactive Application)是法国Dassault公司于1975年开发的一套完整的3D CAD/CAM/CAE一体化软件。
它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。
CATIA V5不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。
CATIA V5大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC加工等领域。
由于其功能的强大而完美,CATIA V5已经成为三维CAD/CAM领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。
法国的幻影2000系列战斗机就是使用CATIA V5进行设计的一个典范;波音777客机则使用CATIA V5实现了无图纸设计。
曲柄连杆机构课件
节能环保设计理念的应用
高效能设计
优化曲柄连杆机构的结构 设计,提高发动机的燃烧 效率,降低燃油消耗和排 放。
绿色制造工艺
采用环保的制造工艺,减 少对环境的污染,同时降 低生产成本。
可回收与再利用
设计可回收和再利用的曲 柄连杆机构,降低资源消 耗和环境污染,实现可持 续发展。
将电动机的旋转运动转化为输送带的往复运动,从而实现货物的输送。
03
曲柄连杆机构的优化设计
减小曲柄连杆机构的振动
1 2
优化曲柄连杆机构的结构设计
通过改进结构设计,降低机构运动时的振动。
选用高刚度材料
采用高刚度材料制造曲柄连杆机构,提高机构的 抗振性能。
3
合理配置平衡块
通过配置平衡块来平衡机构运动时的惯性力,减 少振动。
曲柄连杆机构课件
目录 Contents
• 曲柄连杆机构概述 • 曲柄连杆机构的应用 • 曲柄连杆机构的优化设计 • 曲柄连杆机构的常见问题与解决方案 • 曲柄连杆机构的发展趋势与展望
01
曲柄连杆机构概述
定义与组成
定义
曲柄连杆机构是发动机中的主要运动机构,它将活塞的往复运动转换为曲轴的旋 转运动,同时将作用于活塞上的力转变为曲轴对外输出的转矩,以驱动汽车的运 行。
根据曲柄连杆机构的工作需求,选择 具有合适强度、刚度和耐磨性的材料 。
考虑材料的加工性能
注重环保和可持续性
优先选择可再生、可回收或低环境影 响材料,促进可持续发展。
选用易于加工和制造的材料,降低制 造难度和成本。
04
曲柄连杆机构的常见问题与 解决方案
曲轴断裂问题
曲轴断裂是曲柄连杆机构中常见的问题之一,通常是由于曲轴承受过大的扭矩或 弯曲应力所导致的。
活塞式压缩机的受力分析

s 2r (曲柄半径)
r/L
;
;
L —连杆长度,通常 总在
1/3~1/6之间。
2、曲柄机构的运动分析 (1)活塞的位移
xr 1 cos / 4 1 cos 2
式中:
—曲柄转角(一般规定活塞在外 止点时 =0° )。
活塞的速度及加速度
1、运动学原理
活塞式压缩机曲柄连杆机构的任务是将主 轴的旋转运动,通过连杆转化为活塞(或者是 十字头)的往复运动。
运动时:
曲柄作旋转运动;
连杆作平面运动;(可看作一部分随曲柄 作旋转运动,另一部分做往复运动); 活塞(十字头)做往复运动; 我们重点是 研究往复运动。
行程、连杆比
活塞行程:
连杆比:
(使连杆受拉伸为正、压缩为负)。
3)、活塞力 P ,传递至十字头 销(或活塞销)时,分解为两个力:侧 向力 N 及连杆力 PL (见图2)。 由图2知: N Ptg
PL P / cos
侧向力、连杆力 的作用点
侧向力 N 作用于十字头滑道上或气
缸工作面上(筒形活塞);连杆力 P L 作
活塞式压缩机的受力分析
曲柄连杆机构简化图 1
A’ S=2r x A A’’ β B’ C α O
r+L
ω
B’’
Pg pg Fh
R B
ω T PL
-N
P Pg I
A N
β
r h
O
PL
α
P
h’
压缩机作用力分析图 2
第一节、简述压缩机的动力学 一、运动学 二、压缩机中的作用力 三、压缩机中惯性力的平衡
气体力
1)、气体力:Pg pg Fh 是个变化值。 ( Pg —气体压力) 。其值决定 pg 的大小和 活塞面积 Fh 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1 )
2
2
sin co s
3
正偏心机构(如图a、图b所示) 在活塞下行时连杆摆角较小, 使得作功行程中活塞侧推力有所减小。
多用于柴油机,由于活塞顶岸与缸壁 间的间隙减小,从而改善导热,减轻 主推力边的热负荷,使顶环隙整个圆 周上不积碳。
(a)曲轴无偏心 (b)活塞销正偏心 (c)活塞销负偏心
x R (1 co s ) L (1 1 sin )
2 2
内燃机结构的一个重要的特 征参数。现代内燃机一般为 1/3~1/5。
x R (1 co s ) L (1
1 sin )
2 2
x R (1 co s
1 2
sin )
4 co s
3
)
近似解
a R (cos cos 2 ) a1 a 2
2
当λ>1/4时,有三个极值点Leabharlann 0 180
arcco s( 1 / 4 )
当λ<1/4时,有两个极值点
0
180
实际上发动机的活塞最大加速度: 汽油机 柴油机
e
2
co s e
[
R l
sin e
r
2
co s( )
2 2
r l
l
sin ( )
e
2
2
sin e ]
x 0 R cos e r cos( ) l cos e x e x oe [ R cos e r cos( ) l cos e ]
2
co s 1
1 2
sin
2 2
co s 1
1 2
sin
2 2
1 24
6
sin
4 4
1 246
sin
6
牛顿二项式定理
精确解
v dx dt dx d d dt R (sin
sin 2
2 co s
谢谢观赏
Any more information
please give some questions
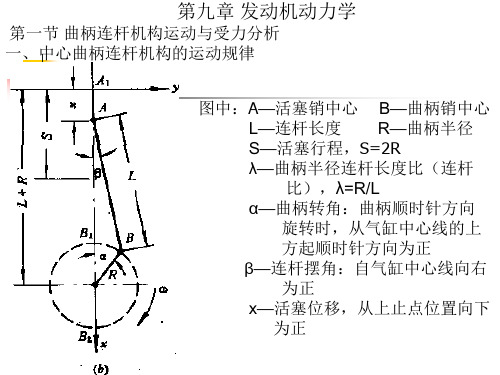
L、 、 R
r 、 e、 r
X c R sin r sin ( e ) Y c R co s r co s( e )
由此可以看出,副连杆销 的运行轨迹图为一椭圆。
aCx
d XC dt
2 2
2
2 sin e R sin R 2 R sin r co s( e ) r 2 co s 3 L co s L co s 2
a m ax (5 0 0 1 5 0 0 ) g a m ax ( 2 0 0 8 0 0 ) g
arcsin( sin )
d dt
co s co s
co s 1 sin
2 2
d
2
dt
2
d dt
2
e
优点:可以保证主、副缸有相 近的活塞行程和相同的几何压 缩比e; 缺点:主连杆承受来自副缸的 附加弯矩以及主缸活塞承受来 自副缸的附加侧压力比较大。 优点:使主连杆的附加弯矩以 及主缸活塞上的附加侧压力比 较较小; 缺点:难以保证主、副缸有比 较相近的活塞行程和相同的几 何压缩比。
e
在位移、速度、加速度的数值及变 化规律是不同的,这使主副缸惯性力 的平衡和扭转的计算都复杂化;
由于副缸的 e 1 和 e 2与主缸的不一 样,这给主副缸喷油定时与配气定时 的一致性带来不利影响。
副缸活塞的行程大于主缸活塞行程 ,使得主副缸的工作容积不同。 一般在设计新内燃机的估算中, 可以认为主、副缸活塞的运动情 况相同。
一般情况下, e 比 略大一些。
l sin e R sin e r sin ( )
e
e arcsin [
R l
sin e
r l
sin ( )]
e
co s e
[
R l
co s e
r
l
co s( )]
内燃机动力学
袁林 2012-10-22
主要目的
(1)求出各运动构件的运动规律;
(2)为后续工作打下基础,包括:曲柄连 杆机构中作用力和力矩的计算、发动机的 平衡、曲轴系统扭转振动的分析、以及整 机振动等。
主要内容
中心式曲柄连杆机构运动学
偏心式曲柄连杆机构运动学 主副连杆式曲柄连杆机构运 动学
O
x
( L R ) e ( R co s + L co s )
2 2
位移(精确) 位移(近似) 速度(精确) 速度(近似) 加速度(精确) 加速度(近似)
x R [(1 co s )
4
(1 co s 2 ) k sin ]
v R (sin
对于 x o e ,先令 v e 0 , 求出 e ,再代入 x o 的表达 式,即可求出。
v e R sin e r sin ( ) l e sin e
2 2 2 a e R cos e r cos( ) r sin( ) l e cos e l e sin e
)
近似解
v R (sin
2
sin 2 ) v1 v 2
平均速度
2s 60 n sn 30
cm
s-活塞行程 n-曲轴转速
精确解
a dv dt dv d d dt R (co s
2
co s 2 co s
sin 2
3 2
负偏心机构(如图c)广泛应用于车用汽油机中,目的是减轻活塞对气缸壁的敲击, 降低运转噪声。
sin 1
e LR e LR
k 1 k 1
k=e/R,为相对偏心量。 取值范围一般为0.05~0.25
sin 2
活塞下行和上行所经过的曲柄转角大小不同。
与中心曲柄连杆机构相比,只是气缸 中心线偏离曲轴回转中心一小段距离e
sin 2
2 co s
k
co s co s
)
v R (sin
2
sin 2 k co s )
a R (
2
co s( ) co s
co s
2
co s
3
)
a R (cos cos 2 k sin )
曲轴中心
B
A OB AB
曲柄销中心
活塞销中心
曲柄 连杆
R L
中心曲柄连杆机构运动分析简图
co s
1 sin
2 2
=
R L
sin sin
x A1 A A1O A O ( L R ) ( R cos + L cos )
称为连杆比,它是影响
aCy
d YC dt
2
2 co s e R sin R 2 R co s r sin ( e ) r 2 co s 3 L co s L co s 2
aC
aCx aCy
2 2
arctan
aCx aCy