关于脉冲输出概要
脉冲输出
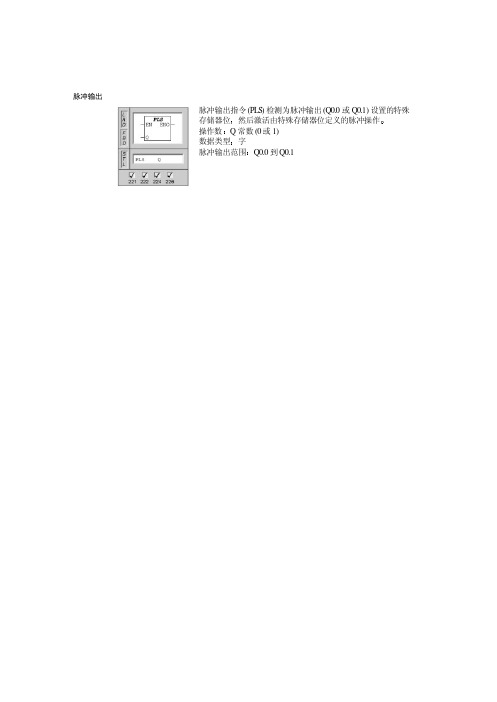
脉冲输出脉冲输出指令 (PLS) 检测为脉冲输出 (Q0.0 或Q0.1) 设置的特殊存储器位操作数字脉冲输出范围理解 S7-200 高速输出指令每个 CPU 有两个 PTO/PWM 发生器产生高速脉冲串和脉冲宽度可调的波形另一个分配在数字输出 Q0.1当 Q0.0 或 Q0.1设定为 PTO 或 PWM 功能时在输出点禁止使用通用功能输出强置或立即输出指令的执行都不影响输出波形输出由映像寄存器控制以高电平或低电平产生波形的起始和结束建议在允许 PTO 或 P W M 操作前把 Q0.0 和 Q0.1 的映像寄存器设定为 0Óû§¿ØÖÆÖÜÆÚºÍÂö³åÊý±äÕ¼¿Õ±ÈÊä³ö每个 PTO/PWM 发生器有一个控制字节 (8位)»¹ÓÐÒ»¸ö 32 位无符号的脉冲计数值一旦这些特殊存储器的位被置成所需操作这条指令使 S7-200 读取特殊存储器中的位修改特殊寄存器(SM)区(包括控制字节)¿ÉÒԸıäPTO或P W M特性并执行 PLS指令注:所有控制字节脉冲宽度和脉冲数的缺省值都是 0Êä³ö´Ó off 到 on 和从 on 到 off 的切换时间不一样PTO/PWM 的输出负载至少为 10% 的额定负载PWM 操作P W M 功能提供占空比可调的脉冲输出s) 或毫秒 (ms)65,535 微秒或 2Âö¿í±ä»¯·¶Î§·Ö±ðΪ 065,535 毫秒占空比为 100%µ±Âö¿íΪ 0 时即输出断开那么周期时间被缺省地设定为 2 个时间单位同步更新和异步更新如果不需要改变时间基准利用同步更新提供平滑转换PWM的典型操作是当周期时间保持常数时变化脉冲宽度不需要改变时间基准如果需要改变 PTO/PWM发生器的时间基准异步更新会造成 PTO/PWM功能被瞬时禁止这会引起被控设备的振动建议采用PWM同步更新控制字节中的 PWM 更新方法位 (SM67.4 或 SM77.4) 用来指定更新类型注意会产生一个异步更新PTO 操作PTO 提供指定脉冲个数的方波 (50% 占空比) 脉冲串发生功能周期的范围是 50 到 65,535 微秒如果设定的周期是奇数脉冲数的范围是 如果周期时间少于 2 个时间单位如果指定脉冲数为 0状态字节中的 PTO 空闲位 (SM66.7 或 SM76.7) 用来指示可编程脉冲串完成根据脉冲串的完成调用中断程序 (有关中断和通讯指令的细节请见9.15 节)¸ù¾Ý°üÂç±íµÄÍê³Éµ÷ÓÃÖжϳÌÐòPTO 功能允许脉冲串的排队立即开始新脉冲的输出有两种方法完成管线单段管线在单段管线中一旦启动了起始 PTO 段并再次执行 PLS指令在管线中一次只能存一个入口接着输出第二个波形重复这个过程设定下一个脉冲串的特性脉冲串之间进行平滑转换l如果在利用 PLS 指令捕捉到新脉冲串前启动的脉冲串已经完成如果试图装入管线当PLC进入 RUN 状态时如果要检测序列的溢出多段管线在多段管线中在该模式下选择多段操作时间基准可以选择微秒或者毫秒在包络表中的所有周期值必须使用一个基准不能改变每段的长度是8个字节16 位周期增量值和 32 位脉冲计数值组成多段 PTO 操作的另一个特点是按照每个脉冲的个数自动增减周期的能力输入一个负值将减小周期如果在许多脉冲后指定的周期增量值导致非法周期值同时停止 PTO 功能另外如果要人为地终止一个正进行中的 PTO 包络当 PTO 包络执行时表 9-15 多段 PTO 操作的包络表格式从包络表开始的包络段数描述字节偏移0 段数 (1 到 255)½«²»²úÉú PTO 输出尤其在步进电机控制中按要求产生输出波形加速电机然后减速电机假定需要4000个脉冲达到要求的电机转动数最大脉冲频率是10 kHz¶ø²»ÊÇÓÃƵÂÊËùÒÔ最大频率对应的周期是100usÒªÇóÔÚ 200 个脉冲左右达到最大脉冲频率在400 个脉冲完成使用一个简单公式计算 PTO/PWM 发生器用来调整每个脉冲周期所使用的周期增量值利用这个公式相似地由于第 2 段是恒速控制该段的周期增量是 0±í 9-16 给出了产生所要求波形的值一种方法是在数据块中定义包络表的值段的最后一个脉冲的周期在包络中不直接指定 如果需要在段之间需要平滑转换计算段的最后一个脉冲周期的公式是上面的简例是有用的记住对于结束周期值或给定段的脉冲个数在确定校正包络表值的过程中按照下面的公式可以计算完成一个包络段的时间长短利用表 9-18 可以作为快速参考启动要求的操作对 PTO/PWM 1 使用 SMB77脉冲宽度 (SMW70 或SMW80) 或周期 (SMW68 或SMW78)Èç¹ûҪʹÓöà¶ÎÂö³å´®²Ù×÷表 9-17 PTO /PWM 控制寄存器Q0.0Q0.1状态字节 SM66.4 SM76.4 PTO 包络由于增量计算错误而终止0 = 无错误1 = 终止SM66.6 SM76.6 PTO 管线上溢/下溢0 = 无上溢1 = PTO 空闲Q0.0 Q0.1 控制字节SM67.0 SM77.0 PTO/PWM 更新周期值 0 = 不更新1 = 脉冲宽度值SM67.2 SM77.2 PTO 更新脉冲数0 = 不更新0 = 异步更新0 = 单段操作 1 = 选择 PWM SM67.7 SM77.7 PTO/PWM 允许 0 = 禁止 PTO/PWM;1 = 允许 PTO/PWMQ0.0 Q0.1 其它 PTO/PWM 寄存器SMW68 SMW78 PTO/PWM 周期值 (范围0 到 65535)SMD72 SMD82 PTO 脉冲计数值 (范围用从 V0 开始的字节偏移表示 (仅用在多段PTO 操作中)表 9-18 PTO/PWM 控制字节参考执行 PLS 指令的结果控制寄存器(16进制) 允许模式选择PTO段操作PWM更新方法时基脉冲数脉冲宽度周期16#81 Yes PTO 单段1us/ 周期装入16#84 Yes PTO 单段1us/ 周期装入16#85 Yes PTO 单段1us/ 周期装入装入16#89 Yes PTO 单段 1 ms/ 周期装入16#8C Yes PTO 单段 1 ms/ 周期装入16#8D Yes PTO 单段 1 ms/ 周期装入装入16#A0 Yes PTO 多段1us/ 周期16#A8 Yes PTO 多段 1 ms/ 周期16#D1 Yes PWM同步1us/ 周期装入16#D2 Yes PWM同步1us/ 周期装入16#D3 Yes PWM同步1us/ 周期装入装入16#D9 Yes PWM同步 1 ms/ 周期装入16#DA Yes PWM同步 1 ms/ 周期装入16#DB Yes PWM同步 1 ms/ 周期装入装入PTO/PWM 初始化和操作顺序PTO/PWM 的初始化和操作步骤说明如下这些步骤的说明使用了输出 Q0.0Òò´Ë³õ´ÎɨÃè´æ´¢Æ÷λΪÕæ (SM0.1=1)»ò PTO/PWM 必须重新初始化PWM 初始化把 Q0.0 初始化成 P W M1. 用初次扫描存储器位(SM0.1) 设置输出为1ÓÉÓÚ²ÉÓÃÁËÕâÑùµÄ×Ó³ÌÐòµ÷ÓôӶø¼õÉÙÁËɨÃèʱ¼ä2. 初始化子程序中使 P W M以微秒为增量单位 (或 16#DB 使 PWM以毫秒为增量单位)ÔÊÐí PTO/PWM 功能选择以微秒或毫秒为增量单位3. 向 SMW68 (字) 写入所希望的周期值5. 执行 PLS 指令6. 向SMB67 写入16#D2 选择以微秒为增量单位(或16#DA 选择以毫秒为增量单位)¿ÉÒÔ×°ÈëÒ»¸öеÄÂö¿íÖµ7. 退出子程序请遵循如下步骤以把所需脉宽装入 SMW70 (字)中使 S7-200 对 PTO/PWM 发生器编程PTO 初始化- 单段操作为了初始化 PTO1. 用初次扫描存储器位(SM0.1) 复位输出为0ÓÉÓÚ²ÉÓÃÁËÕâÑùµÄ×Ó³ÌÐòµ÷ÓôӶø¼õÉÙÁËɨÃèʱ¼ä2. 初始化子程序中使 PTO 以微秒为增量单位 (或16#8D 使 PTO 以毫秒为增量单位)ÔÊÐíPTO/PWM 功能选择以微秒或毫秒为增量单位3. 向 SMW68 (字) 写入所希望的周期值5. 可选步骤则可以编程并执行全局中断允许指令以了解中断处理的详细内容使 S7-200 对 PTO/PWM 发生器编程修改 PTO 周期 - 单段操作当使用单段PTO操作时请遵循如下步骤使 PTO 以微秒为增量单位 (或 16#89 使 PTO 以毫秒为增量单位)ÔÊÐíPTO/PWM功能选择以微秒或毫秒为增量单位2. 向 SMW68 (字) 写入所希望的周期值3. 执行 PLS 指令在更新周期的 PTO 波形开始前4. 退出中断程序或子程序为了在中断程序中或子程序中改变 PTO 脉冲计数1. 把 16#84 送入 SMB67用这些值设置控制字节的目的是选择PTO操作和设置更新脉冲计数3. 执行 PLS 指令在更新周期的 PTO 波形开始前4. 退出中断程序或子程序为了在中断程序中或子程序中改变 PTO 的周期和脉冲计数1. 把 16#85 送入 SMB67用这些值设置控制字节的目的是选择PTO操作设置更新周期和脉冲计数3. 向 SMD72 (双字) 写入所希望的脉冲计数使 S7-200 对 PTO/PWM 发生器编程CPU 必须完成已经启动的 PTOPTO 初始化 - 多段操作为了初始化 PTO1. 用初次扫描存储器位(SM0.1) 复位输出为0ÓÉÓÚ²ÉÓÃÁËÕâÑùµÄ×Ó³ÌÐòµ÷ÓôӶø¼õÉÙÁËɨÃèʱ¼ä2. 初始化子程序中使 PTO 以微秒为增量单位 (或16#A8 使 PTO 以毫秒为增量单位)ÔÊÐíPTO/PWM 功能选择以微秒或毫秒为增量单位3. 向 SMW168 (字) 写入包络表的起始V存储器偏移值确保段数区 (表的第一个字节) 正确如果你想在一个脉冲串输出 (PTO) 完成时立刻执行一个相关功能使脉冲串输出完成中断事件(事件号19) 调用一个中断子程序参见 9.16 节中断指令6. 执行 PLS 指令7. 退出子程序首次扫描5000SMW80SM0.0PLS EN Q0.X1INMOV_W OUTEN ENO ENO Network 619-21 使用 PWM 的高速输出实例(续)单段操作脉冲串实例22 在 SM 存储器中使用单段操作的脉冲串输出实例 (续)OUT SMB67ENO9-22 在 SM 存储器中使用单段操作的脉冲串输出实例 (续)IN 16#AO MOV_B OUTSMB67EN SM0.0IN 500MOV_W OUT SMW168EN IN 3MOV_B OUT VB500EN 设定控制字节位Network 1SUBROUTINE 0ENOENOENO IN 500MOV_W OUT EN ENOVW501IN -2MOV_W OUTEN ENO VW503IN 200MOV_D OUTEN ENOVD5059-23 使用多段操作的脉冲串输出实例23 使用多段操作的脉冲串输出实例 (续)图 9-23 使用多段操作的脉冲串输出实例 (续)。
cp1h脉冲输出点
cp1h脉冲输出点
摘要:
1.概述cp1h 脉冲输出点
2.cp1h 脉冲输出点的功能和应用
3.使用cp1h 脉冲输出点的注意事项
正文:
cp1h 脉冲输出点是一种常见的数字输出设备,它可以将数字信号转换为脉冲信号,用于控制各种设备和系统。
在工业自动化、机器人、电子测量和计算机控制等领域中,cp1h 脉冲输出点发挥着重要的作用。
cp1h 脉冲输出点的主要功能是将数字信号转换为脉冲信号,以实现对设备的精确控制。
例如,在机器人控制系统中,cp1h 脉冲输出点可以将机器人的转动角度、移动速度等数字信号转换为脉冲信号,从而精确地控制机器人的运动。
此外,cp1h 脉冲输出点还可以用于电子测量设备中,实现对信号的采样和处理。
在使用cp1h 脉冲输出点时,需要注意以下几点:
1.确保cp1h 脉冲输出点的工作电压和电流符合设备要求,以免损坏设备。
2.根据设备的实际需求,设置合适的脉冲频率和脉冲宽度。
3.在使用cp1h 脉冲输出点控制设备时,要确保信号传输线路的稳定性和可靠性,以免出现信号丢失或干扰的情况。
4.定期检查cp1h 脉冲输出点的工作状态,发现异常及时处理,以保证设备的正常运行。
总之,cp1h 脉冲输出点在工业自动化、机器人、电子测量和计算机控制等领域中发挥着重要的作用。
关于PLC的脉冲输出(S7-300)
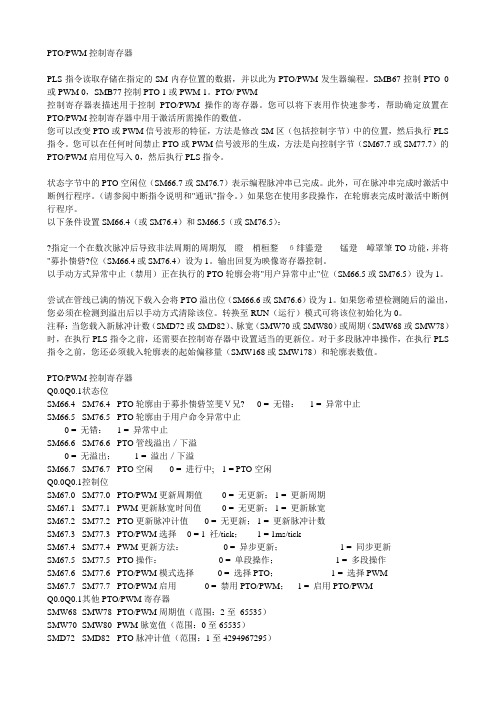
关于PLC的脉冲输出(S7-300)1. 关于脉冲输出脉冲输出的⽅法有很多:如果要产⽣占空⽐为50%的脉冲信号:①⽤S7-300PLC的时钟存储器右键点击PLC,选中时钟存储器,默认存储字节为0。
各时钟存储器的周期和频率如下表所⽰:②采⽤循环中断使⽤循环中断OB35,设置中断执⾏时间为1000ms在OB35块中编写程序程序在第⼀次执⾏时,因为M10.0为0,所以给M10.0置位第⼆次执⾏时,M10.0为1,所以M10.0复位。
我们设定OB35执⾏的时间为1000ms,这样,M10.0就会相隔1s循环置位、复位,就产⽣的周期为2s的脉冲。
当然如果我们要修改脉冲的周期,只要修改OB执⾏的时间就可以了,⽐⽤PLC的时钟存储器要更灵活。
③采⽤定时器定时⾃动复位的⽅式产⽣脉冲当然我们还可以采⽤我们的⽼朋友定时器来产⽣脉冲⽹络1是相隔1s⾃动复位,⽹络2为单按钮启停。
这样,第⼀次M10.0为1时,Q0.0置位第⼆次M10.1为1时,Q0.0复位Q0.0上就可以产⽣周期为2s占空⽐为50%的脉冲信号了。
关于⽹络2的单按钮启停其实也有很多种实现⽅式,当然这⼜是另外的故事了。
产⽣占空⽐可调的脉冲信号①采⽤两个定时器,如下图,这也是教科书上都会介绍的⼀种⽅式。
下图可以产⽣⼀个周期为3s的脉冲信号②采⽤IEC定时器实现S7-300⾥⾯我不太喜欢⽤IEC定时器的原因是因为每⽤⼀个定时器都会产⽣⼀个DB背景数据块。
⽤S5定时器会更⽅便⼀点。
③⽤定时器和⽐较指令第⼀个程序段的⽬的是定时器循环计时,它的当前值是在0-3s之间变化的。
第⼆个程序段在进⾏⽐较的时候要注意,定时器的ET参数为:Elapse time即时间流逝值。
是⼀个32位的time型变量。
只要它⼤于1s时就让它接通。
这样Q0.0上也就产⽣了如上的脉冲信号。
⽤S5定时器会有些不太⼀样:S5定时器⾥BI的值为剩余时间的ms数除以10,所以在⽤⽐较指令的时候,把MW30和200做⽐较,也就是剩余时间为2s时让Q0.0接通。
脉冲脉宽输出功能讲解

脉冲输出功能利用FP0的高速计数器功能,可以实现两路脉冲信号的输出。
并且,若以FP0的专用指令,可实现定位控制、梯形升降速控制、原点返回和点动等功能。
概述●利用FP0的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。
●指令F168能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动输出所要求的脉冲,实现梯形升降速的定位控制。
●F168指令也能实现自动回原点功能。
●利用指令F169,可以实现点动(JOG)的脉冲输出。
设置系统寄存器当使用脉冲输出功能时,应将相应通道(CH0或CH1)的系统寄存器No.400和No.401设置为“不使用高速计数器”。
设置方法请参考“7.4.3的系统寄存器表”。
F168 位置控制(梯形控制/原点返回)根据设定的参数,从特定的输出点(Y0或Y1)输出特定形式的脉冲信号。
编程举例:相应的寄存器表A:可使用N/A:不可使用说明:●若控制标志(Control flag)(R903A或R903B)为OFF,且控制触点(如R0)为ON状态时,则从指定的输出点(Y0或Y1),按照数据表给定的参数输出一个特定形式的脉冲串。
●数据表用于指定位控运动的控制码、起始速度、最大速度、加速/减速时间或目标值等。
●根据加/减速时间,输出频率从起始速度升到最大速度。
●相应的数据区见下表:●在脉冲输出的过程中,可通过重写目标值,来输出更多的脉冲。
运行模式说明:●增量模式<相对值控制>根据目标的设置设定值,来输出相应脉冲数的脉冲。
将控制码(Control code)设置为H02(即:增量模式;正向:OFF;反向:ON),当目标值为正时,方向信号输出为OFF,同时高速计数器的当前值增加。
当目标值为负时,方向信号输出为ON,同时高速计数器的当前值减少。
当控制码(Control code)设置为H03时,方向信号输出则和前述情况的相反。
●绝对模式〈绝对值控制〉根据当前值和目标值的设置不同,输出脉冲(当前值与目标值之差为输出的脉冲数)。
cp1h脉冲输出点

cp1h脉冲输出点
摘要:
1.引言
2.cp1h脉冲输出点的定义与作用
3.cp1h脉冲输出点的类型与特点
4.cp1h脉冲输出点在工业自动化中的应用
5.结论
正文:
cp1h脉冲输出点是工业自动化领域中常用的一种设备,具有广泛的应用。
本文将详细介绍cp1h脉冲输出点的相关知识,包括其定义、作用、类型、特点以及在工业自动化中的应用。
首先,我们需要了解cp1h脉冲输出点的定义和作用。
cp1h脉冲输出点,又称为cp1h脉冲输出模块,是一种用于控制机器设备运动的设备。
它可以将数字信号转换为脉冲信号,进而控制设备的启停、转向等运动。
cp1h脉冲输出点的主要作用是提高生产效率,实现生产过程的自动化控制。
其次,cp1h脉冲输出点有多种类型,各具特点。
根据输出信号的不同,cp1h脉冲输出点可分为多种类型,如单向脉冲输出点、双向脉冲输出点、高速脉冲输出点等。
不同类型的cp1h脉冲输出点适用于不同的应用场景。
用户在选择时,应根据实际需求进行选择。
此外,cp1h脉冲输出点具有以下特点:高可靠性、稳定性好、抗干扰能力强等。
这些特点使得cp1h脉冲输出点在工业自动化领域有着广泛的应用。
最后,我们来看一下cp1h脉冲输出点在工业自动化中的应用。
cp1h脉冲输出点广泛应用于各种机器设备的控制系统中,如机床、机器人、输送线等。
通过cp1h脉冲输出点,可以实现设备的自动启停、自动换向、自动定位等功能,大大提高了生产效率,降低了人工成本。
总之,cp1h脉冲输出点在工业自动化领域具有重要的应用价值。
脉冲输出
PTO/PWM控制寄存器PLS指令读取存储在指定的SM内存位置的数据,并以此为PTO/PWM发生器编程。
SMB67控制PTO 0或PWM 0,SMB77控制PTO 1或PWM 1。
PTO/ PWM控制寄存器表描述用于控制PTO/PWM操作的寄存器。
您可以将下表用作快速参考,帮助确定放置在PTO/PWM控制寄存器中用于激活所需操作的数值。
您可以改变PTO或PWM信号波形的特征,方法是修改SM区(包括控制字节)中的位置,然后执行PLS 指令。
您可以在任何时间禁止PTO或PWM信号波形的生成,方法是向控制字节(SM67.7或SM77.7)的PTO/PWM启用位写入0,然后执行PLS指令。
状态字节中的PTO空闲位(SM66.7或SM76.7)表示编程脉冲串已完成。
此外,可在脉冲串完成时激活中断例行程序。
(请参阅中断指令说明和"通讯"指令。
)如果您在使用多段操作,在轮廓表完成时激活中断例行程序。
以下条件设置SM66.4(或SM76.4)和SM66.5(或SM76.5):?指定一个在数次脉冲后导致非法周期的周期氖 瞪 梢桓鍪 б绯鎏跫 锰跫 嶂罩筆TO功能,并将"募扑愦砦?位(SM66.4或SM76.4)设为1。
输出回复为映像寄存器控制。
以手动方式异常中止(禁用)正在执行的PTO轮廓会将"用户异常中止"位(SM66.5或SM76.5)设为1。
尝试在管线已满的情况下载入会将PTO溢出位(SM66.6或SM76.6)设为1。
如果您希望检测随后的溢出,您必须在检测到溢出后以手动方式清除该位。
转换至RUN(运行)模式可将该位初始化为0。
注释:当您载入新脉冲计数(SMD72或SMD82)、脉宽(SMW70或SMW80)或周期(SMW68或SMW78)时,在执行PLS指令之前,还需要在控制寄存器中设置适当的更新位。
对于多段脉冲串操作,在执行PLS 指令之前,您还必须载入轮廓表的起始偏移量(SMW168或SMW178)和轮廓表数值。
PLC脉冲输出功能
PLC脉冲输出功能5.5.4S7-200 PLC的脉冲输出功能1、概述S7-200有两个PTO/PWM发⽣器,⽤以建⽴⾼速脉冲串(PTO)或脉宽调节(PWM)信号波形。
⼀个发⽣器指定给数字输出点Q0.0,另⼀个发⽣器指定给数字输出点Q0.1。
其中,PTO提供⽅波(50%占空⽐)输出,脉冲周期和数量可由⽤户控制。
每个PTO/PWM发⽣器有⼀个控制字节(8位),⼀个周期值和脉宽值(不带符号的16位值)和⼀个脉冲计值(不带符号的32位值)。
这些值全部存储在特殊内存(SM)区域的指定位置。
⼀旦设置这些特殊内存位的位置,选择所需的操作后,执⾏脉冲输出指令PLS即启动操作。
该指令会从特殊存储器SM中读取数据,使程序按照其存储值控制PTO/PWM发⽣器通过修改SM区域中(包括控制字节)要求的位置,就可以更改PTO或PWM 的信号波形特征,然后执⾏PLS指令。
PTO/PWM控制寄存器包括状态位控制寄存器、控制位控制寄存器及其其他PTO/PWM寄存器。
⽤于Q0.0的这三种寄存器如表5-1,表5-2和表5-3所⽰。
表5-1 Q0.0的状态位控制寄存器表5-2 Q0.0的控制位控制寄存器表5-3 Q0.0的其他PTO/PWM寄存器2、PTO的操作模式PTO可提供单脉冲串或多脉冲串(使⽤脉冲轮廓)。
⑴PTO脉冲串的单段管线在单段管线模式,需要为下⼀个脉冲串更新特殊寄存器。
⼀旦启动了起始PTO 段,就必须按照第⼆个波形的要求改变特殊寄存器,并再次执⾏PLS指令。
第⼆个脉冲串的属性在管线中⼀直保持到第⼀个脉冲串发送完成。
在管线中⼀次只能存储⼀段脉冲串的属性。
当第⼀个脉冲串发送完成时,接着输出第⼆个波形,此时管线可以⽤于下⼀个新的脉冲串。
重复这个过程可以再次设定下⼀个脉冲串的特性。
⑵PTO脉冲串的多段管线在多段管线模式,CPU⾃动从V存储器区的包络表(轮廓表)中读出每个脉冲串的特性。
在该模式下,仅使⽤特殊存储器区的控制字节和状态字节。
关于脉冲输出讲解

一、脉冲输出功能XC3系列和XC5系列PLC 一般具有2个脉冲输出。
通过使用不同的指令编程方式,可以进行无加速/减速的单向脉冲输出,也可以进行带加速/减速的单向脉冲输出,还可以进行多段、正反向输出等等,输出频率最高可达200K Hz 。
Y0COM0Y1COM1Y2COM2注:1)为了使用脉冲输出,必须要使用带有晶体管输出的PLC 。
如XC3-14T-E 或XC3-60RT-E等。
2)XC5系列输出点数为32点的PLC 最大能够具有4路(Y0、Y1、Y2、Y3)脉冲输出功能。
二、脉冲输出的种类与指令应用1、 无加减速时间变化的单向定量脉冲输出指令PLSY• 以指定的频率产生定量脉冲的指令。
• 支持32位指令[DPLSY]。
• 频率:0~200KHz • 输出端子:Y0 或 Y1• 输出模式:连续或有限脉冲输出 •脉冲数目:16位指令 0~K3276732位指令 0~K2147483647注意:如控制对象是步进电机或伺服电机,建议不要采用该指令,以避免电机失步。
采用带加减速的脉冲输出指令PLSR 可以避免失步造成的影响。
步进/伺服电机驱动器当输出完设定的脉冲数目之后,输出自动停止。
2、 可变频率脉冲输出指令PLSFM0以设定频率连续输出脉冲直到通过指令停止输出。
3、带加减速的定量脉冲输出指令PLSR (含3种控制模式)•以指定的频率和加减速时间产生定量脉冲的指令。
•频率:0~200KHz•加减速时间:5000ms以下•支持32位指令[DPLSR]。
•输出端子:Y0 或Y1•输出模式:有限脉冲数目•脉冲数目:16位指令0~K32,76732位指令0~K2,147,483,647一般情况中途停止4、脉冲段切换[PLSNEXT/PLSNT]指令M81705、脉冲停止[STOP]指令6、脉冲数立即刷新[PLSMV]指令前进后退工作台原点信号● PLSMV 为32位操作指令● 当工作台后移的过程中,得到原点信号X2,执行外部中断,PLSMV 指令立即执行,不受扫描时间的影响,将输出端口Y0输出的脉冲数刷新,并送入D8170中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、脉冲输出功能
XC3系列和XC5系列PLC 一般具有2个脉冲输出。
通过使用不同的指令编程方式,可以进行无加速/减速的单向脉冲输出,也可以进行带加速/减速的单向脉冲输出,还可以进行多段、正反向输出等等,输出频率最高可达200K Hz 。
Y0
COM0
Y1
COM1
Y2
COM2
注:1)为了使用脉冲输出,必须要使用带有晶体管输出的PLC 。
如XC3-14T-E 或XC3-60RT-E
等。
2)XC5系列输出点数为32点的PLC 最大能够具有4路(Y0、Y1、Y2、Y3)脉冲输出功能。
二、脉冲输出的种类与指令应用
1、 无加减速时间变化的单向定量脉冲输出指令PLSY
∙ 以指定的频率产生定量脉冲的指令。
∙ 支持32位指令[DPLSY]。
∙ 频率:0~200KHz ∙ 输出端子:Y0 或 Y1
∙ 输出模式:连续或有限脉冲输出 ∙
脉冲数目:16位指令 0~K32767
32位指令 0~K2147483647
注意:如控制对象是步进电机或伺服电机,建议不要采用该指令,以避免电机失步。
采用带加减速的脉冲输出指令PLSR 可以避免失步造成的影响。
步进/伺服电机
驱动器
当输出完设定的脉冲数目之后,输出自动停止。
2、 可变频率脉冲输出指令PLSF
M0
以设定频率连续输出脉冲直到通过指令停止输出。
3、带加减速的定量脉冲输出指令PLSR (含3种控制模式)
∙以指定的频率和加减速时间产生定量脉冲的指令。
∙频率:0~200KHz
∙加减速时间:5000ms以下
∙支持32位指令[DPLSR]。
∙输出端子:Y0 或Y1
∙输出模式:有限脉冲数目
∙脉冲数目:16位指令0~K32,767
32位指令0~K2,147,483,647
一般情况中途停止
4、脉冲段切换[PLSNEXT/PLSNT]指令
M8170
5、脉冲停止[STOP]指令
6、脉冲数立即刷新[PLSMV]指令
前进
后退
工作台
原点信号
● PLSMV 为32位操作指令
● 当工作台后移的过程中,得到原点信号X2,执行外部中断,PLSMV 指令立即执
行,不受扫描时间的影响,将输出端口Y0输出的脉冲数刷新,并送入D8170中。
● 该指令可用于消除脉冲控制中产生的累积误差。
7、原点回归[ZRN]指令
爬行速度S2
一个扫描周期
脉冲输出Y0近点信号X3脉冲标志M8170
原点回归速度S1
S1·
原点回归速度:可用操作数:K 、TD 、CD 、D 、FD S2·
爬行速度:可用操作数:K 、TD 、CD 、D 、FD 。
S3
近点信号:可用操作数:X 、Y 、M 、S 。
脉冲输出地址:仅能指定Y0或Y1。
● 支持32位指令[DZRN]。
● S1与S2的方向相同且S1的绝对值大于S2。
● 驱动指令后,以原点回归速度S1开始移动。
● 当近点信号由OFF 变为ON 时,减速到爬行速度S2.
●
当近点信号由ON 变为OFF 时,在停止脉冲输出的同时,向寄存器(Y0:[D8171,D8170],Y1:[D8174,D8173])中写入0。
8、相对位置控制[DRVI]指令
S1·
输出脉冲数:可用操作数:K 、TD 、CD 、D 、FD S2·
输出脉冲频率:可用操作数:K 、TD 、CD 、D 、FD 。
0 D1
脉冲输出地址:仅能指定Y0或Y1。
D2
脉冲输出方向:可指定任意Y 。
加减速时间:D8230(单字)
●
所谓相对驱动方式,是指由当前位置开始的移动距离的方式。
● 支持32位指令[DDRVI]。
● 目标位置指定S1,对应下面的当前值寄存器作为绝对位置
(Y0:[D8171,D8170],Y1:[D8174,D8173])
原点位置
当前位置
目标位置
9、绝对位置控制[DRV A]指令
S1·
目标位置(绝对指定):可用操作数:K 、TD 、CD 、D 、FD
输出脉冲频率:可用操作数:K、TD、CD、D、FD。
D1脉冲输出地址:仅能指定Y0或Y1。
D2脉冲输出方向:可指定任意Y。
加减速时间:D8230(单字)
●所谓绝对驱动方式,是指运行至由原点(0点)为基点的对应位置方式。
●支持32位指令[DDRV A]。
●目标位置指定S1,对应下面的当前值寄存器作为绝对位置
(Y0:[D8171,D8170],Y1:[D8174,D8173])
当前位置
原点位置目标位置
10、绝对位置多段脉冲控制[PLSA]指令
S1·是以Dn或FDn为起始地址的一段区域。
上例:D0设定第1段脉冲的最高频率、D1设定第1段脉冲的绝对位置,D2设定第2段脉冲的最高频率、D3设定第2段脉冲的绝对位置,……以Dn、Dn+1的值都为0表示分段结束,最多可设定24段。
可用操作数:D、FD
S2·加减速时间。
这里的时间是指从开始到第一段最高频率的加速时间,同时也定义了所有段的频率与时间的斜率,从而后面的加减速都按照这个斜率来加速/减速。
可用操作数:K、TD、CD、D、FD
D1指定输出脉冲的Y编号,只可在Y000或Y001输出。
D2指定输出脉冲方向的Y编号,可以任意指定。
●是以指定的频率、加减速时间和脉冲方向分段产生绝对位置脉冲的指令。
●支持32位指令[DPLSA]。
三、输出端子接线
下面是输出端子与伺服驱动器的接线示意图:
四、注意事项
1、阶频的概念
2、分段脉冲输出中的频率跳变
M0
M1
注:软硬件在3.0以上版本的,支持脉冲的顺序执行。
五、关于脉冲输出特殊线圈与寄存器脉冲输出的一些标志位如下表所示:
脉冲输出的一些特殊寄存器如下表所示:
六、脉冲输出案例:
1.脉冲输出控制信捷V5变频器的转速
说明,通过X2选择给变频器输出脉冲.通过三档旋钮(X0﹑X1)选择脉冲输出的频率,控制V5变频器的频率。
1).变频器参数:1.P0.01=7 脉冲输出给定频率.
2.P1.11=11.0 脉冲最大给定频率11.0K
3.P1.12=1.0 脉冲最小给定频率1.0K时,对应变频器为0.00HZ
4.P1.14=11.0 脉冲最大给定频率11.0K时,对应变频器为50.00HZ
5. P4.05=35 输入端子X6选择为脉冲频率输入
2).端子接线图
PLC 侧
变频器侧
3).程序:
2.分丝机往复运动中点校正
说明:使用伺服在中点开关附近往复运动,每往复一次,距离减少20个脉冲,减少到定值70000后,以固定值往复运动,运行10000次后停机。
每次后退经过中点开关时,校准原点位置,减少机械误差。
1).分丝机示意图:
前进
后退
中点
2).程序
3磨床程序
说明:磨床在磨轴承,首先通过逐步减速磨好轴承,磨完轴承后快速回原点,对砂轮的磨损补偿,重新设原点,准备磨下一个轴承。
在磨床运用中,使用多段速指令,自动减速无需停机,极大的提高了生产效率。
1).流程图
S0
快速趋进到轴承,减速磨黑
皮,再次减速粗磨,最后减
速精磨磨光,期间发脉冲不
需要停止。
S1
磨轴承结束后,快速
回原点
S2
砂轮磨损补偿
启动
2).磨床加工示意图:
回原点
3).程序:。