结构力学 位移计算分解
合集下载
结构力学4静定结构的位移计算

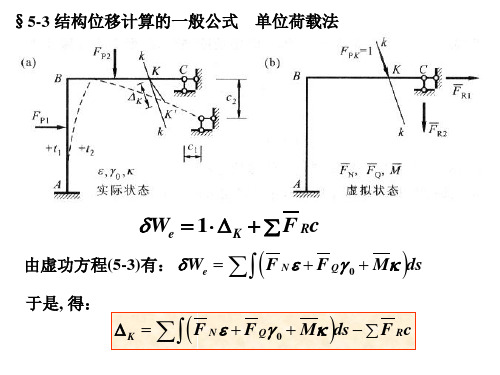
4.3 平面杆件结构位移计算的一般公式
4.3.1 单位荷载法与结构位移计算的一般公式
P R1 1
F D 1 D F
c F R 2 c2 D F R c
c2 c1
d d du i1
D F R c M d FQ dh FN du
河南理工大学万方科技学院
结构力学
第四章 静定结构的位移计算
F1 1 FB B F2 2 F3 3 0
(a)
虚位移之间的关系为 1 1 1 B 2 2
1 1 4 2 2 2 C B B 2 2 3 3 3
1 1 1 1 3 E 2 B 2 2 3 3 1 2 1 将以上各关系式代入式(a),得 FB F1 F2 F3 2 3 3 河南理工大学万方科技学院
4.1.3 计算位移的方法
虚功法——依据虚功原理的单位荷载法。
河南理工大学万方科技学院
结构力学
第四章 静定结构的位移计算
4.2 变形体系的虚功原理 4.2.1 实功与虚功 1.功
{
W FD cos
W 2 Fr
α
力,Δ表示广义位移) Δ
功是力与位移的矢量点积
a c l
河南理工大学万方科技学院
结构力学
第四章 静定结构的位移计算
沿所求位移方向虚设单位荷载 F=1的方法称为 单位荷载法,或称为单位力法。 当支座有给定位移时,静定结构的位移可用单 位荷载法来求解,其计算步骤如下: 1. 沿欲求位移的方向虚设相应的单位荷载,并求出
在单位荷载作用下给定位移的支座处的反力
虚功原理
W =U
可写为
位移状态 位移状态
结构力学 位移计算

MK
1
1
MK
θ
∆
已知K点发生剪切位移,求B端位移 B
K
∆i =
∑ ∫ [N
i
δε
+ Q i δγ
+ M i δθ
] ds
----适用于各种杆件体系 线性 非线性 适用于各种杆件体系(线性 非线性). 适用于各种杆件体系 线性,非线性 对于由线弹性直杆组成的结构,有: 对于由线弹性直杆组成的结构, 线弹性直杆组成的结构 适用于线弹性 直杆体系, 直杆体系
所加单位广义力与所求广义位移相对应,该单位 所加单位广义力与所求广义位移相对应 该单位 广义力在所求广义位移上做功. 广义力在所求广义位移上做功 B A P 例: 1)求A点水平位移 求 点水平位移 2)求A截面转角 求 截面转角 3)求AB两点相对水平位移 求 两点相对水平位移 4)求AB两截面相对转角 求 两截面相对转角
P=1
C
P=1
(f)
ϕC
左右
=?
试确定指定广义位移对应的单位广义力。 试确定指定广义位移对应的单位广义力。
P=1 A
(g)
ϕA = ?
A B P=1 P=1
(h)
ϕ AB = ?
§3.4 图乘法及其应用
(Graphic Multiplication Method and its Applications)
解:构造虚设单位力状态. 构造虚设单位力状态
q A
h b
N i ( x) = 0, N P ( x) = 0
Qi ( x) = 1, QP ( x) = q(l − x)
M i ( x) = x − l , M P ( x) = −q (l − x) 2 / 2
1
1
MK
θ
∆
已知K点发生剪切位移,求B端位移 B
K
∆i =
∑ ∫ [N
i
δε
+ Q i δγ
+ M i δθ
] ds
----适用于各种杆件体系 线性 非线性 适用于各种杆件体系(线性 非线性). 适用于各种杆件体系 线性,非线性 对于由线弹性直杆组成的结构,有: 对于由线弹性直杆组成的结构, 线弹性直杆组成的结构 适用于线弹性 直杆体系, 直杆体系
所加单位广义力与所求广义位移相对应,该单位 所加单位广义力与所求广义位移相对应 该单位 广义力在所求广义位移上做功. 广义力在所求广义位移上做功 B A P 例: 1)求A点水平位移 求 点水平位移 2)求A截面转角 求 截面转角 3)求AB两点相对水平位移 求 两点相对水平位移 4)求AB两截面相对转角 求 两截面相对转角
P=1
C
P=1
(f)
ϕC
左右
=?
试确定指定广义位移对应的单位广义力。 试确定指定广义位移对应的单位广义力。
P=1 A
(g)
ϕA = ?
A B P=1 P=1
(h)
ϕ AB = ?
§3.4 图乘法及其应用
(Graphic Multiplication Method and its Applications)
解:构造虚设单位力状态. 构造虚设单位力状态
q A
h b
N i ( x) = 0, N P ( x) = 0
Qi ( x) = 1, QP ( x) = q(l − x)
M i ( x) = x − l , M P ( x) = −q (l − x) 2 / 2
结构力学 结构的位移计算
k
F Ndu
Md
F Q 0ds
F RC
只有荷载作用
无支座移动
k F Ndu Md FQ 0ds
由材料力学知
du
FNP d s EA
d
M Pds EI
d s
k FQP d s GA
10
1.2
9
k--为截面形状系数
A A1 [Al为腹板截面积]
FP
X
待分析平衡的力状态
(c)
直线
几点说明:
X C (1) 对静定结构,这里实际用的是刚体
虚设协调的位移状态
虚位移原理,实质上是实际受力状态 的平衡方程,即
由外力虚功总和为零,即:
X F 0
X
P
C
M 0 B
(2) 虚位移与实际力状态无关,故可设
1 x
X P b 0 (3) 求解时关键一步是找出虚位移状态的
计算结构的位移,就必须明确广义力与广义位移的对应关系。常见的对应有
以下几种情况:
基本原则
求哪个方向的位移就在要求位移的方向上施加相应的单位力。
A
B
位移方向未知
时无法直接虚
拟单位荷载!
求A点的 水平位移
P=1
m=1 求A截面 的转角
m=1
m=1
求AB两截面 的相对转角
P=1
P=1
求AB两点 的相对位移
位移与约束协调:位移函数在约束处的数值等于约束位移。
§4-2 虚功原理
一、虚功原理的三种形式
1、质点系的虚位移原理
具有理想约束的质点系,其平衡的必要和充分条件是:作用于质点系的主
结构力学 第4章 静定结构的位移计算
YA = − b / a
1 ⋅ ∆ + YA ⋅ c = 0
∆ = b⋅c / a
这是单位荷载法 这是单位荷载法 。
求多跨静定梁在C点的支座反力F 例2. 求多跨静定梁在C点的支座反力 C。
F E F D C B A (a)
a
2a
a
2a
a
F E
F D C FC B A (b)
E δ2
δ1
D
δC=1 C
一、公式的进一步推导
∆ KH N P N KQP Q M P M = ∑ ∫ ( N dλ + Qdη + M dϕ ) = ∑ ∫ EA + GA + EI
dϕ
ds
ds
dλ
dη
dλ σ NP ε= ⇒ dλ = εds = ds = ds ds E EA QP dη = γds = k ds GA MP 1 dϕ = ds = ds ρ EI
3.虚功原理的应用 3.虚功原理的应用 1)虚设位移求未知力(虚位移原理) 虚设位移求未知力(虚位移原理) 虚设单位位移法:已知一个力状态, 虚设单位位移法:已知一个力状态,虚设一个单位位移 状态,利用虚功方程求力状态中的未知力。这时, 状态,利用虚功方程求力状态中的未知力。这时,虚功原 理也称为虚位移原理。 理也称为虚位移原理。 2)虚设力系求位移(虚力原理) 虚设力系求位移(虚力原理) 虚设单位荷载法:已知一个位移状态, 虚设单位荷载法:已知一个位移状态,虚设一个单位力 状态,利用虚功方程求位移状态中的未知位移。这时, 状态,利用虚功方程求位移状态中的未知位移。这时,虚 功原理也称为虚力原理。 功原理也称为虚力原理。
钢筋混凝土结构G≈0.4E 钢筋混凝土结构 矩形截面, 矩形截面,k=1.2,I/A=h2/12
结构力学5-3结构位移计算的一般公式
FQP FNP MP , 0 k , 按照材料力学有: EA GA EI A S2 截面系数: k 2 A 2 dA I b
F Q FQP F N FNP MM P ds k ds ds 所以: K EA GA EI
⑴ 梁和刚架: K ⑶ 组合结构: K
例5-1 求C点的竖向位移和转角。
⒉ 求C点截面的转角。
由于简支梁在全跨均布荷载作用 下变形与内力都是对称的,所以梁中 点应无转角发生。 其虚拟力状态中的内力是反对称 的,按照式(5-5)进行积分同样可求得 转角位移:
C 0
1 2
1 2
M图
例5-2 求图示曲杆B端的竖向位移。 已知:EI、EA、GA均为常数,矩形截面,
M R sin , F N sin , F Q cos
⑶ B端的竖向位移。
yB F Q FQP MM P F N FNP ds ds k ds EI EA GA
例5-3 求图示桁架支座结点B的水平位移。各杆EA相同。
FP
0
2FP
FP
b h, h 1 , G 0.4 E R 10
解:⑴ 实际状态的内力。 M P FP R sin FNP FP sin , FQP FP cos ⑵ 虚拟状态的内力。
M R sin , F N sin , F Q cos
⑶ B端的竖向位移。
2FP
FP
0
0
0
0
1
0
1
0
FNP 图
解:⑴ 施加单位荷载。 ⑵ 求实际状态的内力。 ⑶ 求虚拟状态的内力。 ⑷ 求结点B的水平位移。
F Q FQP F N FNP MM P ds k ds ds 所以: K EA GA EI
⑴ 梁和刚架: K ⑶ 组合结构: K
例5-1 求C点的竖向位移和转角。
⒉ 求C点截面的转角。
由于简支梁在全跨均布荷载作用 下变形与内力都是对称的,所以梁中 点应无转角发生。 其虚拟力状态中的内力是反对称 的,按照式(5-5)进行积分同样可求得 转角位移:
C 0
1 2
1 2
M图
例5-2 求图示曲杆B端的竖向位移。 已知:EI、EA、GA均为常数,矩形截面,
M R sin , F N sin , F Q cos
⑶ B端的竖向位移。
yB F Q FQP MM P F N FNP ds ds k ds EI EA GA
例5-3 求图示桁架支座结点B的水平位移。各杆EA相同。
FP
0
2FP
FP
b h, h 1 , G 0.4 E R 10
解:⑴ 实际状态的内力。 M P FP R sin FNP FP sin , FQP FP cos ⑵ 虚拟状态的内力。
M R sin , F N sin , F Q cos
⑶ B端的竖向位移。
2FP
FP
0
0
0
0
1
0
1
0
FNP 图
解:⑴ 施加单位荷载。 ⑵ 求实际状态的内力。 ⑶ 求虚拟状态的内力。 ⑷ 求结点B的水平位移。
结构位移计算(第四章)

为什么弯矩图在 杆件同侧图乘结 果为正?
例. 试求图示结构B点竖向位移.
Pl
EI
l
P B
l
Mi
1
EI
MP
l
解: By
MM P EI ds yc EI
1 1 2 ( Pl l l Pl l l ) EI 2 3 4 Pl 3 () 3 EI
二、几种常见图形的面积和形心位置的确定方法
2 A1 lh 3
1 A2 lh 3
二次抛物线
2 A lh 3
例:求图示梁(EI=常数,跨长为l)B截面转角 B
q
A
1 2 ql 8 1 2
B
1
MP 图
M
图
解:
1 2 1 2 1 B [( l ql ) ] EI 3 8 2 3 1 ql ( ) 24 EI
)
用单位荷载法计算支座移动引起的位移计算 步骤如下:
(1)沿拟求△方向虚设相应的单位荷载; (2)求RK,根据静力平衡条件求单位荷载作用下 相应于支座移动cK的支座反力RK; (3)求△
ic Ri Ci
注意:当R与c方向一致时,乘积为正;反之为负。
§4-7 线弹性结构的互等定理
1. 功的互等定理: 方法一
刚架与梁的位移计算公式为:
iP MM P ds EI
在杆件数量多的情况下,不方便. 下面介绍 计算位移的图乘法.
一、图乘法
MM P ds EI 1 M M P ds EI
1 EI
(对于等 截面杆)
MM
P
dx (对于直杆)
( M x tan ) 图乘法的 1 适用条件是 x tan M P dx EI 什么? tan 图乘法求位移公式为: xM P dx
结构力学——第6章结构位移计算讲解
对整个结构有:
WV dWV FNdu Md FSds
虚功方程为: W WV
W FNdu Md FSds
§6-2 变形体系的虚功原理
虚功原理的应用
虚位移原理: 对于给定的力状态,虚设一个位移状态,利 用虚功方程求解力状态中的未知力。
虚力原理: 对于给定的位移状态,虚设一个力状态,利用 虚功方程求解位移状态中的位移。
例6-7 图a为一组合结构,试求D点的竖向位移△Dy。
解:实际状态FNP、MP如图b所示。 ΔDy
FN FNPl E1 A1
A yC E2 I2
虚拟状态FN、M如图c所示。
(1 2 2)Fa 4Fa3
()
E1 A1
3E2 I 2
§6-6 静定结构温度变化时的位移计算
试求图a所示结构由于温度变
对于静定结构,支座发生移动并不引起内力,材料不发生变形,此 时结构的位移属刚体位移。位移计算一般公式简化为
ΔKc FRc
§6-7 静定结构支座移动时的位移计算
例6-9 图a所示三角刚架右边支座的竖向位移△By=0.06m, 水 平位移为△Bx=0.06m, 已知l=12m,h=8m。试求由此引
第六章 结构位移计算
§6-1 概述 §6-2 变形体系的虚功原理 §6-3 位移计算的一般公式 单位荷载法 §6-4 静定结构在荷载作用下的位移计算 §6-5 图乘法 §6-6 静定结构温度变化时的位移计算 §6-7 静定结构支座移动时的位移计算 §6-8 线弹性结构的互等定理 §6-9 空间刚架的位移计算公式
变形曲线。 解:实际状态弯矩图如图b所示。
虚拟状态弯矩图如图c所示。
ΔAy
A yC 1 (l l ) Fl 1 (l 2l ) Fl EI EI 2 2 2EI 3 4
WV dWV FNdu Md FSds
虚功方程为: W WV
W FNdu Md FSds
§6-2 变形体系的虚功原理
虚功原理的应用
虚位移原理: 对于给定的力状态,虚设一个位移状态,利 用虚功方程求解力状态中的未知力。
虚力原理: 对于给定的位移状态,虚设一个力状态,利用 虚功方程求解位移状态中的位移。
例6-7 图a为一组合结构,试求D点的竖向位移△Dy。
解:实际状态FNP、MP如图b所示。 ΔDy
FN FNPl E1 A1
A yC E2 I2
虚拟状态FN、M如图c所示。
(1 2 2)Fa 4Fa3
()
E1 A1
3E2 I 2
§6-6 静定结构温度变化时的位移计算
试求图a所示结构由于温度变
对于静定结构,支座发生移动并不引起内力,材料不发生变形,此 时结构的位移属刚体位移。位移计算一般公式简化为
ΔKc FRc
§6-7 静定结构支座移动时的位移计算
例6-9 图a所示三角刚架右边支座的竖向位移△By=0.06m, 水 平位移为△Bx=0.06m, 已知l=12m,h=8m。试求由此引
第六章 结构位移计算
§6-1 概述 §6-2 变形体系的虚功原理 §6-3 位移计算的一般公式 单位荷载法 §6-4 静定结构在荷载作用下的位移计算 §6-5 图乘法 §6-6 静定结构温度变化时的位移计算 §6-7 静定结构支座移动时的位移计算 §6-8 线弹性结构的互等定理 §6-9 空间刚架的位移计算公式
变形曲线。 解:实际状态弯矩图如图b所示。
虚拟状态弯矩图如图c所示。
ΔAy
A yC 1 (l l ) Fl 1 (l 2l ) Fl EI EI 2 2 2EI 3 4
结构位移的计算

AB A B
A
A
p A
A
B
p B
AB
AB A B
4、上述各种位移统称为“广义位移”。与广义 位移相对应的力称为“广义力”。 二、计算结构位移的目的
1、刚度验算:电动吊车梁跨中挠度 fmax≤l/600. 高层建筑的最大位移< 1/1000 高度。 最大层间位移< 1/800 层高。
相邻微段k、j、i连续,变形协调,位移相等,而力为作用力 与反作用力, 虚功相互抵消,即W内=0,故:
全结构:W W外 (a)
18
A
B
力状态:静力平衡 位移状态:其它原因引起
ds
ds
(2) 按刚体虚功与变形虚功计算: 将ds虚位移分解为: 刚体虚位移: 变形虚位移: ABCD A'B'C'D' A'B'C'D' A''B''C''D''
——虚设力系求刚体体系位移
C B 已知 c1 求
?
A
设虚力状态
a
b
P=1
R1 a P b 0
虚功方程
R1
b a
A
C B a b
1 R1 c1 0
b c1 a
R1
小结: (1)形式是虚功方程,实质是几何方程; (2)在拟求位移方向虚设一单位力,利用平衡条件求出与已知位移相 应的支座反力。构造一个平衡力系;
1 cA 2l
1 3
A
2 3
B
C D
1
1 2l
2 l
3 2l
A
A
p A
A
B
p B
AB
AB A B
4、上述各种位移统称为“广义位移”。与广义 位移相对应的力称为“广义力”。 二、计算结构位移的目的
1、刚度验算:电动吊车梁跨中挠度 fmax≤l/600. 高层建筑的最大位移< 1/1000 高度。 最大层间位移< 1/800 层高。
相邻微段k、j、i连续,变形协调,位移相等,而力为作用力 与反作用力, 虚功相互抵消,即W内=0,故:
全结构:W W外 (a)
18
A
B
力状态:静力平衡 位移状态:其它原因引起
ds
ds
(2) 按刚体虚功与变形虚功计算: 将ds虚位移分解为: 刚体虚位移: 变形虚位移: ABCD A'B'C'D' A'B'C'D' A''B''C''D''
——虚设力系求刚体体系位移
C B 已知 c1 求
?
A
设虚力状态
a
b
P=1
R1 a P b 0
虚功方程
R1
b a
A
C B a b
1 R1 c1 0
b c1 a
R1
小结: (1)形式是虚功方程,实质是几何方程; (2)在拟求位移方向虚设一单位力,利用平衡条件求出与已知位移相 应的支座反力。构造一个平衡力系;
1 cA 2l
1 3
A
2 3
B
C D
1
1 2l
2 l
3 2l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轴向 剪切 弯曲
式中: E 弹性模量; G A 横截面积; I
剪切模量; 截面惯性矩;
K
截面形状系数。如:对矩形截 面k=6/5; 圆形截面k=10/9。
内力的正负号规定如下:
轴力
N, NP
以拉力为正;
剪力 Q , Q 者为正;
P
使微段顺时针转动
弯矩 M P , M 只规定乘积的正负 号。使杆件同侧纤维受拉时, 其乘积取为正。
3. 对组合结构: kP
求图示等截面梁B端转角。 解:1)虚拟单位荷载 2)MP 须分段写
M ( x) x l (0 x l )
A
EI x1 l/2 x2
P
B
l/2
B
l
0lΒιβλιοθήκη MPM dx EI2
Px l M P ( x) (0 x ) 2 2 P(l x) l M P ( x) ( x l) 2 2
N , M,Q , R
d , d , d , C
由单位载荷Pk=1引起的内力和反力 实际状态中的微段变形、支座位移 实际状态中拟求的位移
k
单位载荷法——马克斯威尔-莫尔 (Maxwell-Mohr)法
k 计算结果为正,所求的位移与单位力指向一致,
否则相反
K Nd Md Q d R C
§4.3 静定结构的位移计算 Displacement of Statically Determinate Structures
结构的位移 (Displacement of Structures)
角位移
FP
相对线位移
A
A
y
C
C
C D
FP
D
D
x
相对角位移
线位移
线位移,角位移,相对线位移、角位移等统称广义位移
P=1
A
(e)
B
AB ?
P=1
P=1
C
P=1
(f)
C
左右
=?
试确定指定广义位移对应的单位广义力。
P=1
A
(g)
A ?
A
B
P=1
P=1
(h)
AB ?
二、静定结构的位移计算
K Nd Md Q d R C
1.、载荷作用下的位移计算
kP Nd Q d Md
对于由线弹性直杆组成的结构,由材料力学有:
N P ds KQP ds M P ds d , d , d EA GA EI
N P , QP , M P
结构在载荷作用下实际状态中微段的内力
KP
NN P KQ QP MM P ds EA GA EI
m=1
0
Px x 1 ( ) dx 2 l EI
l l 2
P(l x) x 1 ( ) dx 2 l EI
Pl 2 16 EI
例 :求刚架A点的竖向位移。
解:构造虚设状态
(实际状态) (虚拟状态)
分别列出实际状态和虚拟状态中各杆的内力 方程(或画出内力图)
1 2 ql 2 1 2 qx 2
ql
虚设的力状态
B
K Bx ?
PK B
C
N ,Q, M
A
A
又设与内力 N , Q , M 对应的微段实际 变形分别为dλ、dη和dθ。 若结构有已知支座位移为ci ,与其对应 的由广义力 PK 引起的支座反力为R
实际位移状态
B
K ?
P C
虚设的力状态
PK B C
N ,Q, M
A
dλ、dη和dθ c
一、位移计算的一般公式
(General Formula of Displacements)
下面从虚功方程入手,讨论杆系结构位 移计算的一般公式。
设待求的实际广义位移为ΔK ,与ΔK对应 的广义力为P。 设仅在水平力PK作用下,与之平衡的轴 力、剪力和弯矩分别为 N , Q , M
实际位移状态
P C
支座移动 c、
(2) 超静定、动力和稳定计算 (3)施工要求
位移计算的假定 (1) 线弹性 (Linear Elastic), (2) 小变形 (Small Deformation), (3)理想联结 (Ideal Constraint)。
叠加原理适用(principle of superposition)
A PK=1
A ?
PK=1 B
(a)
A PK=1
AB ?
(b)
试确定指定广义位移对应的单位广义力。
Pk 1 d
C d A B
PK 1 d
(c)
BC ?
1 d1 1 d1
C
d1
(d)
B 1 d2
A
d2
AB AC ?
1 d2
试确定指定广义位移对应的单位广义力。
几点讨论(只有荷载作用):
KP
NN P KQ QP MM P EA GA EI ds
MM P ds EI
一般来说,剪切变形影响很小,通常忽略不计。
1. 对梁和刚架: KP
2. 对桁架:
kP
NN P ds NN P l EA EA MM P ds NN P l EI EA
引起结构位移的原因
载荷、 温度改变 T、 制造误差 等 计算位移的目的 (1) 刚度要求 如: 在工程上, 吊车梁允许的挠度< 1/600 跨度; 高层建筑的最大位移< 1/1000 高度。 最大层间位移< 1/800 层高。
铁路工程技术规范规定: 桥梁在竖向活载下, 钢板桥梁和钢桁梁最大挠度 < 1/700 和1/900跨度
公式的普遍性表现在: 1. 位移原因:载荷、温度改变、支座移动等; 2. 结构类型:梁、刚架、桁架、拱、组合结构;
静定和超静定结构;
3. 材料性质:线性、非线性; 4. 变形类型:弯曲、拉(压) 、剪切变形;
5. 位移种类:线位移、角位移;相对线位移
和相对角位移。
试确定指定广义位移对应的单位广义力。
A
R
外力虚功 内力虚功
W外虚 =ΣRi Ci+PKΔK
W内虚 Nd Md Q d
由虚功方程
W外虚 = W内虚
则结构虚功方程改写为 位移计算的一般公式
令PK=1
K Nd Md Q d R C
K Nd Md Q d R C
式中: E 弹性模量; G A 横截面积; I
剪切模量; 截面惯性矩;
K
截面形状系数。如:对矩形截 面k=6/5; 圆形截面k=10/9。
内力的正负号规定如下:
轴力
N, NP
以拉力为正;
剪力 Q , Q 者为正;
P
使微段顺时针转动
弯矩 M P , M 只规定乘积的正负 号。使杆件同侧纤维受拉时, 其乘积取为正。
3. 对组合结构: kP
求图示等截面梁B端转角。 解:1)虚拟单位荷载 2)MP 须分段写
M ( x) x l (0 x l )
A
EI x1 l/2 x2
P
B
l/2
B
l
0lΒιβλιοθήκη MPM dx EI2
Px l M P ( x) (0 x ) 2 2 P(l x) l M P ( x) ( x l) 2 2
N , M,Q , R
d , d , d , C
由单位载荷Pk=1引起的内力和反力 实际状态中的微段变形、支座位移 实际状态中拟求的位移
k
单位载荷法——马克斯威尔-莫尔 (Maxwell-Mohr)法
k 计算结果为正,所求的位移与单位力指向一致,
否则相反
K Nd Md Q d R C
§4.3 静定结构的位移计算 Displacement of Statically Determinate Structures
结构的位移 (Displacement of Structures)
角位移
FP
相对线位移
A
A
y
C
C
C D
FP
D
D
x
相对角位移
线位移
线位移,角位移,相对线位移、角位移等统称广义位移
P=1
A
(e)
B
AB ?
P=1
P=1
C
P=1
(f)
C
左右
=?
试确定指定广义位移对应的单位广义力。
P=1
A
(g)
A ?
A
B
P=1
P=1
(h)
AB ?
二、静定结构的位移计算
K Nd Md Q d R C
1.、载荷作用下的位移计算
kP Nd Q d Md
对于由线弹性直杆组成的结构,由材料力学有:
N P ds KQP ds M P ds d , d , d EA GA EI
N P , QP , M P
结构在载荷作用下实际状态中微段的内力
KP
NN P KQ QP MM P ds EA GA EI
m=1
0
Px x 1 ( ) dx 2 l EI
l l 2
P(l x) x 1 ( ) dx 2 l EI
Pl 2 16 EI
例 :求刚架A点的竖向位移。
解:构造虚设状态
(实际状态) (虚拟状态)
分别列出实际状态和虚拟状态中各杆的内力 方程(或画出内力图)
1 2 ql 2 1 2 qx 2
ql
虚设的力状态
B
K Bx ?
PK B
C
N ,Q, M
A
A
又设与内力 N , Q , M 对应的微段实际 变形分别为dλ、dη和dθ。 若结构有已知支座位移为ci ,与其对应 的由广义力 PK 引起的支座反力为R
实际位移状态
B
K ?
P C
虚设的力状态
PK B C
N ,Q, M
A
dλ、dη和dθ c
一、位移计算的一般公式
(General Formula of Displacements)
下面从虚功方程入手,讨论杆系结构位 移计算的一般公式。
设待求的实际广义位移为ΔK ,与ΔK对应 的广义力为P。 设仅在水平力PK作用下,与之平衡的轴 力、剪力和弯矩分别为 N , Q , M
实际位移状态
P C
支座移动 c、
(2) 超静定、动力和稳定计算 (3)施工要求
位移计算的假定 (1) 线弹性 (Linear Elastic), (2) 小变形 (Small Deformation), (3)理想联结 (Ideal Constraint)。
叠加原理适用(principle of superposition)
A PK=1
A ?
PK=1 B
(a)
A PK=1
AB ?
(b)
试确定指定广义位移对应的单位广义力。
Pk 1 d
C d A B
PK 1 d
(c)
BC ?
1 d1 1 d1
C
d1
(d)
B 1 d2
A
d2
AB AC ?
1 d2
试确定指定广义位移对应的单位广义力。
几点讨论(只有荷载作用):
KP
NN P KQ QP MM P EA GA EI ds
MM P ds EI
一般来说,剪切变形影响很小,通常忽略不计。
1. 对梁和刚架: KP
2. 对桁架:
kP
NN P ds NN P l EA EA MM P ds NN P l EI EA
引起结构位移的原因
载荷、 温度改变 T、 制造误差 等 计算位移的目的 (1) 刚度要求 如: 在工程上, 吊车梁允许的挠度< 1/600 跨度; 高层建筑的最大位移< 1/1000 高度。 最大层间位移< 1/800 层高。
铁路工程技术规范规定: 桥梁在竖向活载下, 钢板桥梁和钢桁梁最大挠度 < 1/700 和1/900跨度
公式的普遍性表现在: 1. 位移原因:载荷、温度改变、支座移动等; 2. 结构类型:梁、刚架、桁架、拱、组合结构;
静定和超静定结构;
3. 材料性质:线性、非线性; 4. 变形类型:弯曲、拉(压) 、剪切变形;
5. 位移种类:线位移、角位移;相对线位移
和相对角位移。
试确定指定广义位移对应的单位广义力。
A
R
外力虚功 内力虚功
W外虚 =ΣRi Ci+PKΔK
W内虚 Nd Md Q d
由虚功方程
W外虚 = W内虚
则结构虚功方程改写为 位移计算的一般公式
令PK=1
K Nd Md Q d R C
K Nd Md Q d R C