合肥工业大学电气控制与plc王建平
合肥工业大学电气与自动化工程学院电气班
11
2
第14章电力拖动系统电动机的选择
§14~1、电机的发热、冷却及工作制分类
12
2
§14~2、各种工作制电动机的选择;
§14~5、允许合闸次数
14-1;14-3;14-4
12
1
§14~6、冲击负载时电机选择;§14~7、调速电机功率的选择;§14~8、统计法和类比法;
12
1
§14~9、电流种类、形式、额定电压、转速的选择
§10-4、技术数据的计算及其参数;
4
2)直流电机的机械特性及四象限运行测试
8
2
§10-5、绕线转子电机调速及制动电阻
10-1;10-2
8
2
第11章起动及起动设备的计算
§11~1、起动方法;§11~2、起动电机;
9
2
§11~3、起动电阻的计算;
§11~5、绕线转子电机起动电阻的计算;
11-2
9
2
§11~6、起动过程;
8-2
1
2
第9章直流电机的电力拖动
§9-1的起动;
§9-3、他励直流电机的制动;
9-1;9-3;
3
4
§9-3、他励直流电机的制动;
§9-4、直流电机的调速;
9-6;9-8;9-17
4
4
§9-5、晶闸管-直流电机系统;
§9-6、他励直流电机的过渡过程的能耗;
§11~7、过渡过程的能量损耗
11-12
10
4
第12章三相异步电机的调速
§12~1、变极调速;§12~2、变频调速;§12~3、能耗转差调速
第13章多电机拖动系统
硬轴连接和同步旋转(电轴)系统
HFUT_5bcb481a68
李巧林 张 辉 王章豹 王建平 檀江林 张建设 郑红梅 李兴国 方 敏
面向工程应用 深化实验改革—国家级工程 2008jyxm043 训练中心机电类实践教学基地人才综合素质 培养教学模式创新与实践 基于核心价值体系构建的高校思想政治理论 2008jyxm044 课创新研究与实践 2008jyxm045 2008jyxm046 利用网络教学平台进行公共政治理论课实践 教学的探索与研究 大学生工程基础教育和创新能力培养的研究 与实践 高校人才培养质量监控与评价综合信息管理 系统建设
XJ2009018
2008.12
研究 周期 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 二年 一年 一年 一年 一年 研究经费 (万元) 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 委托 委托 委托 委托 委托
合肥工业大学2008年教学研究项目汇总表
序号 1 2 3 4 5 6 7 8 9 项目代号 项 目 名 称 主持人 洪天求 杨善林 张 辉 所在学院 校办 管理学院 教务处 教务处 教务处 电气学院 人文学院 人文学院 机汽学院 管理学院 电气学院 校办 立项类别 高校重大教 改计划项目 省级重点 省级重点 省级重点 省级重点 省级重点 省级重点 省级重点 省级重点 省级重点 省级重点 省级重点 省级重点 2008jyxm002 工科“三创”人才培养试验区建设 2008jyxm039 信息管理类专业创新人才培养模式研ห้องสมุดไป่ตู้与实 践 2008jyxm040 CDIO工程教育人才培养模式研究与实践 2008jyxm041 2008jyxm042 以应用型创新人才培养为目标的高校实践教 学体系级模式的创新与实践 高校内部教学质量管理体系及保障机制的研 究与实践
2010年度大学生学术科技奖励申请公示1

综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛
教育部高等学校电子商务专 业教学指导委员会 教育部高等学校电子商务专 业教学指导委员会 教育部高等学校电子商务专 业教学指导委员会 教育部高等学校电子商务专 业教学指导委员会 教育部高等学校电子商务专 业教学指导委员会 教育部高等学校电子商务专 业教学指导委员会 教育部高等学校电子商务专 业教学指导委员会 教育部高等学校电子商务专 业教学指导委员会
200 200 200 200 100 100 100 100 100 300 300 300 200 200 200 100 500
第二届全国高校“创新、创意、创业”电子商 综合性和单科性 教育部高等学校电子商务专 务挑战赛安徽赛区三等奖 学术科技竞赛 业教学指导委员会 “飞思卡尔”杯全国大学生智能汽车竞赛,安 徽区激光组“一等奖” “飞思卡尔”杯全国大学生智能汽车竞赛,安 徽区光电组“一等奖” “飞思卡尔”杯全国大学生智能汽车竞赛,安 徽区电磁组“一等奖” “飞思卡尔”杯全国大学生智能汽车竞赛,安 徽区电磁组“二等奖” “飞思卡尔”杯全国大学生智能汽车竞赛,安 徽区摄像头组“二等奖” “飞思卡尔”杯全国大学生智能汽车竞赛,安 徽区光电组“二等奖” “飞思卡尔”杯全国大学生智能车竞赛中,安 徽区电磁组三等奖 2010年国际大学生物联网创新创业大赛暨第四 届美新杯MEMS传感器应用大赛中国总决赛二等 奖 2010年国际大学生物联网创新创业大赛暨第四 届美新杯MEMS传感器应用大赛中国总决赛三等 奖 参加“美新杯”中国MENS传感器应用大赛,获 得苏皖赛区二等奖,全国三等奖 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 综合性和单科性 学术科技竞赛 教育部高等学校自动化专业 教学指导分委员会 教育部高等学校自动化专业 教学指导分委员会 教育部高等学校自动化专业 教学指导分委员会 教育部高等学校自动化专业 教学指导分委员会 教育部高等学校自动化专业 教学指导分委员会 教育部高等学校自动化专业 教学指导分委员会 教育部高等学校自动化专业 教学指导分委员会 物联网创新创业大赛组委会 综合性和单科性 、微纳米应用技术大赛组委 学术科技竞赛 会 物联网创新创业大赛组委会 综合性和单科性 、微纳米应用技术大赛组委 学术科技竞赛 会 综合性和单科性 全球华人微纳米系统分子学 学术科技竞赛 会CINS
合肥工业大学--电力电子技术--精品课程
图4-6 电阻负载单相交流调压电路 基波和谐波电流含量
0
60
120 180
触发延迟角α/( °)
合肥工业大学电气工程学院电力电子技术精品课程项目组
12.1.1 单相交流调压电路
阻感负载的情况
电流谐波次数和电阻负载时相同,也只含3、5、7…等次谐波 随着次数的增加,谐波含量减少 和电阻负载时相比,阻感负载时的谐波电流含量少一些
合肥工业大学电气工程学院电力电子技术精品课程项目组
12.1.1 单相交流调压电路
利用边界条件:ωt = α +θ时io =0,可求得θ:
sin( α + θ − ϕ ) = sin( α − ϕ ) e
180
0 9° 9° ϕ= ° ° 75 75 ° 60 ° ° 45 45 ° ° 30 ° 30 ° 15 15° 0
λ=
P Uo I o Uo = = = S U1 I o U1 1 π −α sin 2α + 2π π
(4-4)
合肥工业大学电气工程学院电力电子技术精品课程项目组
12.1.1 单相交流调压电路
• 的关系: 输出电压与α的关系
移相范围为0≤ α ≤π。 α =0时,输出电压为最 大, Uo=U1。随α的增大,Uo降低, α =π时, Uo =0。
(n=3,5,7,…)
bn =
基波和各次谐波有效值
Uon = 1 2
2 2 an + bn
(n=1,3,5,7,…)
(4-13)
•
负载电流基波和各次谐波有效值
I on = Uon / R
(4-14 )
具有智能观测器的交流矢量控制系统

具有智能观测器的交流矢量控制系统
王建平
【期刊名称】《电气传动》
【年(卷),期】1998(028)004
【摘要】本文提出了在交流矢量控制系统中设计智能观测器的新思路,并以此重构出负载扰动作用前馈补偿的控制。
仿真实验证明,本文给出的智能观测器不仅能很好地处理交流电动机的非线性,而且对参数变化有很强的自校正能力。
【总页数】5页(P12-16)
【作者】王建平
【作者单位】合肥工业大学
【正文语种】中文
【中图分类】TM343.012
【相关文献】
1.交流矢量处理器AD2S100在交流传动矢量控制系统中的应用 [J], 熊健;张凯
2.具有线性状态测器和参数补偿的交流矢量控制系统 [J], 王经维;鲁照权
3.基于矢量控制和智能控制的交流伺服控制系统 [J], 解仑;王志良;郝青辉;李奎;张蓬
4.用线性状态观测器重构交流矢量控制系统中的负载扰动 [J], 鲁照权;王经维
5.交流矢量控制负载转矩智能观测器设计 [J], 王建平;王金玲;穆道明;朱程辉
因版权原因,仅展示原文概要,查看原文内容请购买。
各校控制理论与控制工程情况
中国空间技术研究院(航天五院 中国空间技术研究院 航天五院... / 航天五院
研究方向 04 计算机控制 年份 招生 人数
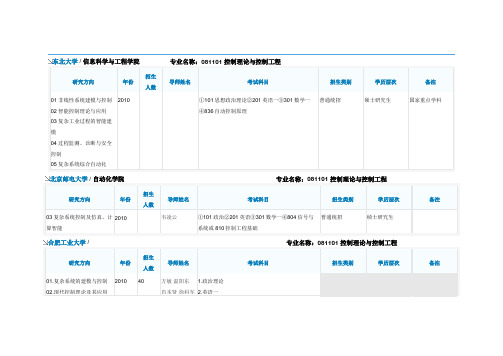
专业名称: 专业名称:081101 控制理论与控制工程
导师姓名 考试科目 ①101 政治②201 英语一③301 数学一④901 自动 控制原理 招生类别 普通统招 学历层次 硕士研究生 备注
东北大学 / 信息科学与工程学院
研究方向 01 非线性系统建模与控制 02 智能控制理论与应用 03 复杂工业过程的智能建 模 04 过程监测、诊断与安全 控制 05 复杂系统综合自动化 年份 招生 人数
专业名称: 专业名称:081101 控制理论与控制工程
导师姓名 考试科目 ①101 思想政治理论②201 英语一③301 数学一 ④836 自动控制原理 招生类别 普通统招 学历层次 硕士研究生 备注 国家重点学科
专业名称: 专业名称:081101 控制理论与控制工程
导师姓名 考试科目 ①101 思想政治理论②201 英语一③301 数学一 ④814 控制综合基础或 815 智能科学基础 招生类别 普通统招 学历层次 硕士研究生 备注 控制综合基础含: 自控原理、现代控 制论各 1/2;智能 科学基础含:自控 原理、计算机视觉 各 1/2
06 先进系统建模方法与仿真 2010 技术
北京机械工业自动化研究所 /
研究方向 01 工业自动化系统集成 02 物流与仓储自动化 03 工业机器人 年份 招生 人数
专业名称: 专业名称:081101 控制理论与控制工程
导师姓名 考试科目 ①101 政治②201 英语③301 数学一④801 自动控 制原理 招生类别 普通统招 学历层次 硕士研究生 备注 复试科目: 数字、模拟电子 技术基础
立体仓库实物模型用于“PLC”实验的教学研究

由于可编程பைடு நூலகம்序 控制器 ( L )具 有编程 简单、可靠 性高、 P C
通 用性 好、功 能 强 _ 、使 用 方便 和 设 计 施 工与 调 试 周 期 短 等 优 人
仓位号显 示
~ 一
功 能选择 开关
… 一
1 0
一
键盘
图 1立体仓库控制面板
图 2立体仓库仓位号
制。当堆垛机平台移动到货架 的指定位置 时,伸叉机构电机驱
动 货 台 向前 伸 出可将 货 物 取 出或 送 人 , 当取 到货 物 或 货 已送 入
立体 仓库 实物 模 型 简介
THF ] l 立 体仓 库 实 物 模 型在 机 械 上采 用 丝 杆 传 动 方 后,则铲叉 向后缩回。整个系统需要实现三维 的位置控制。 L 型 式 ,在 电气 控 制 方 面 ,可 以通 过 目前 比较 流行 的各 类 P C采 集 L 各 种 传感 器 信 号 ,对 步 进 电机 和直 流 电机 进行 较 复 杂 的位 置 控
CE E中国电力教育 P
2 1 年第3 期 总 第1 5 00 4 8 期
立体仓库实物模 型用于 “L ’ PC’实验 的教学研究
朱程辉 王建平 罗国军 秦 剑
摘 要 : 文论 述 了 体 仓库 实物 模 型在 “ 本 立 可编程 控 制 器” 实验 课 程 中的应 用,介 绍 了 利用 Mc Lg 10 iooi 2 0系列可编程控 制 器开发的立 r x
体 仓库货物存 /取 自 动控 制的 综合 实验 ,从 基本 - g f ' t N练和 培 养工 程应 用能 力两个 方 面,探 索如 何在实 践教 学中提 高学生 综合 解决 问题 A
基于DH +网络的山梨醇生产线PLC控制系统

摘
要: 针对原 山梨 醇生产线控制系统 的不足 , 进行 了改造和扩建 , 通过现场触摸屏监控和就地手操相结合及
手动控制和 自动控制相结合 , 真正实现 了对所有工艺段的全程监测和控制 。文章以该系统为实例阐述了一个 基于 D H 网络技术的大型 P 制系统设 计和配置过程 , I C控 并简单介绍 了上位组态软件 R Vi 3 在・L S e 2 P C自 w
PLC o r ls se o h o b t lp o ci n lneb s d o heDH + ne wo k c nto y tm ft es r io r du to i a e n t t r
GE S ol n Z u —i g , HOU e g , Z a F n HAO T o , W U e - n , L igy n a W nj i I n -u 。 L
动控 制 系统 中 的应 用 。 关 键 词 : 梨 醇 {DH 山 网 ;P C P L ;O C数 据 交换 ;R vi 2 S e w3
中图分类号 : P 7. T 23 5
文献标识码 : A
文章 编号:0 35 6 (0 6 0 —6 10 1 0—0 0 2 0 )60 9 —4
型数 据 高速 公路 ) 为最 早 为 可 编程 控 制 器 提供 作 远 程编 程支 持 的控 制 网络 , P C、 C 在 L D S等 自动
l 工 艺 过 程及 要 求
1 1 工艺流 程 .
控制系统 中经常被采 用 。随着计算 机技术 的发
展 , 硬 件 产 品正 趋 于 向标 准 化 、 范 化 方 向发 软 规
( . c o l fElc r 1 S h o e ti Engn e iga d Au o to o c ie rn n t main, Hee ie st fTe h olgy Hee 3 0 9,Chn fiUnv riyo c n o , fi2 0 0 ia;2 Sh n h n Ia ntltc . e z e ) s I el e h i Co , d . It.,S n h n 5 8 0 he z e 1 0 0。Chn ia)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第7章介绍的基本逻辑控制指令主要用于取代传统的继电器控制系统,实现逻辑控制和计时器/计数器的功能。
作为工业控制计算机之一的PLC除了具有逻辑控制功能外,还具有数据运算、传送、变换、程序控制、通信及一些特殊功能。
MicroLogix/SLC5系列PLC的功能指令分为:运算指令、数据处理指令、移位/顺序控制指令、程序控制指令、PID控制指令、通信控制指令、ASCLl码指令等。
本章主要介绍运算指令、数据处理指令、程序控制指令,并结合控制应用给出一些编程实例。
8.1.1数据比较指令数据比较指令属于输入指令,用于比较两个数值的大小,以此作为逻辑梯级连续的条件。
如果指令中被比较的两个数值满足指令的比较条件,则指令逻辑为“真”,否则指令逻辑为“假”。
比较指令见表8-1。
1.基本比较指令表8-1中的前六个为基本比较指令。
其中两个指令的梯形图符号如图8-1所示,其他比较指令的符号格式与之1基本一致。
图中表示的含义是:如果整数文件字N7:1中的值小于整数文件字N7:9中的值且大于或等于零,则将B3:1/3置位。
图8-1 两个比较指令梯形图符号基本比较指令都有两个参数:源(Source)A和源(Source)B。
源A必须是一个数据文件地址(如N7:1),源B既可以是一个数据文件地址(如N7:9)也可以是常数(如0)。
2.通过屏蔽比较相等指令(MEQ )图8-2 MEQ 指令梯形图符号MEQ 指令梯形图符号如图8-2所示,该指令通过一个屏蔽字,使源地址中的数据和比较地址中数据进行比较,它有以下三个参数:1)源(Source )—被比较值的数据文件地址;2)屏蔽(Mask )—屏蔽字地址或一个十六进制常数(如图中的0F0Fh );3)比较(Compare )—既可以是一个常整数,也可以是 比较值的数据文件地址。
在指令执行时,屏蔽字中为“1”的位使数据参与比较,为“0”的位屏蔽对应的位数据,因此,本指令只比较源值(0000010000010010)和比较值(0000000010000010)中对应于屏蔽位为“1”的那些位(图中屏蔽为0F0Fh,相当于0000111100001111,就是比较源值B3:1和比较值B3:2中的位0~3(0010)及位8~11(0100))。
如果源值没有被屏蔽的位与比较值中相对应的位一致,则指令的逻辑为真,当检测到一个不匹配的位时(图中为第10位),指令就变成假。
所以图8-2的结果为假。
3.极限比较指令(LIM)LIM指令有以下三个参数:1)下限(Low Lim)—输入下限值或数据地址;2)测试值(Test)—输入要检测的值或数据地址;3)上限(High Lim)—输入上限值或数据地址。
LIM指令的三个参数可以是数据字地址或常数,但是不能有下列情况图8-3 LIM指令梯形图符号:如果被测参数是一个常数,则下限参数和上限参数必须是数据字地址;如果被测参数是数据字地址,则下限参数和上限参数既可以是常数,也可以是数据字地址。
LIM指令可以根据所设置的上限和下限值,比较某测试值是在指定数值范围之内或之外。
LIM指令逻辑为“真”或为“假”的条件实例参见教材表8-2。
4.比较指令应用举例例1:若整数文件N7:0与N7:1中的数值相等,点亮L1指示灯;如果N7:2与N7: 3中的数值相等,则点亮L2指示灯。
梯形图程序如图8-4所示。
图中,梯级0000中EQU指令参教N7:0与N7:1中的数值相等(皆为9175),则EQU指令逻辑为“真”,接通与输出端O:0/0相连接的L1指示灯。
而梯级0001的EQU指令参数N7:2与N7:3中的数值不相等(分别是-247和-253),则EQU指令逻辑为“假’,与输出端O:0/1相连接的L2指示灯不得电。
图8-4 EQU指令应用梯形图4.比较指令应用举例例2:如果两个数值的低8位相匹配,则点亮L1指示灯。
梯形图逻辑如图8-5所示,因为只要求比较两个数值B3:1和B3:3的低8位,因此,将MEQ指令屏蔽字B3:2中的数值设置为00FFh,只让源值与比较值中的低8位进行相等的比较,尽管待比较两个数值的其他位不全一致,MEQ指令逻辑仍然为“真”,使连接输出端O:0/0的L1指示灯得电点亮。
图8-5 MEQ指令应用梯形图8.1.2 算术运算指令算术运算指令属于输出指令,大多数算术运算指令需要两个操作数,当梯级条件为真时,执行指定的算术运算,将运算结果存放到指定的存储位置,并根据运算结果自动设置算术标志位的值。
例如,加和减指令都是取一对输入值,对它们进行加或减运算,将结果存放到指定的目的地址内,如果运算结果超过PLC的极限值,则置位上溢出或下溢出位。
1.算术运算指令的通用信息1)指令参数。
算术运算指令有源(Source)和目的(Dest)两种参数。
在源参数中输入参与运算数值的数据文件地址或常数,算术、逻辑、或者传送操作的执行都要输入该参数。
如果一条指令有两个源参数,则两个参数不能都是常数。
目的参数是用于存储指令运算结果的数据文件地址。
对于运算中带符号的源和目的参数,PLC 都以二的补码形式存储。
可以选择用变址寻址方式指定指令参数的“字”地址,也可以选择用间接寻址方式指定指令参数的“字”地址。
SLC503(OS301或更高)、SLC504和SLC505 PLC的算术运算指令支持浮点数和字符串数字类型。
2)算术标志位是指PLC状态文件字0的位0~3(S:0/0~ S:0/3)。
算术运算指令执行时,会根据运算的结果对算术标志位进行更新。
标志位的含义如下表。
2.整数/实数算术运算算术运算指令既可以进行整数(16位)/实数(浮点数)运算,也可以进行双整数(32位)运算,本小节只介绍单字运算指令的执行情况及其对状态位的影响。
运算指令的梯形图符号如图8-6所示。
图中只画出了ADD、SQR和CLR三条运算指令, SUB、MUL和DIV指令的符号格式与ADD基本相同,有三个参数:源A、源B和目的地址,只是指令名称和运算法则不同。
NEG、ABS和SQR指令有两个参数:源和目的地址,CLR指令只有一个参数:目的地址。
源参数可以是数据文件地址也可以是常数,但是目的参数必须是数据文件字地址。
图8-6 算术运算指令梯形图符号整数/实数算术运算指令使用详细规则见教材p181-182。
这里通过实例来说明乘、除两条指令的用法。
例3:乘数是12345,被乘数是3,结果存放在整数地址N7:0内,运算结果等于37035,超过最大值32767,此时,如果S:2/14=0,则N7:0内的数值被设置为32767,而算术寄存器内存储的值是37035。
可见虽然PLC发生溢出错误,但是算术寄存器内的结果还是有效的。
例4:图8-7所示的除法指令,19除以4的余数是3(商为4.75),所以商被向上取整到5存储在目的地址N7:3内。
不整除的商是4,存储在S:14内,同时余数3存储在S:13内。
指令参数及执行结果为:参数: N7:1=19 ; N7:2=4结果: N7:3=5S:14=4图8-7 DIV指令梯形图符号 S:13=33.双整数(32位)运算指令MicroLogix/SLC5 PLC都是16位的,其整数范围是-32768~32767,超过这个值就会发生溢出,而这个数值范围在很多应用中是远不能满足算术运算要求的。
因此,PLC应能进行32位的加法、减法和除法运算。
其中32位加法和减法可以直接用ADD和SUB指令来实现,32位除法则由专门的双除指令(DDV)来实现。
1)32位加法和减法。
可以在编程时根据需要选择进行16位或32位有符号整数加法和减法运算。
如果要进行32位算数运算,要将算术溢出选择位(S:2/14)设置为“1”。
16位有符号整数与32位有符号整数相加的实例如图8-8所示。
16位被加数存放在B3:1中,32位加数的低16位存放在B3:2中,高16位存放在B3:3中。
两个加数的值和运算结果参见表8-7(p183)。
图8-8 32位有符号整数加法实例梯形图2)双字除指令(DDV)该指令只有两个参数:源和目的。
DDV指令将算术寄存器中32位值(S:14和S:13)去除以一个16位的源值(图8-9中的N7:0),如果余数大于等于0.5,则目的地址(图8-9中的N7:1)的值向上取整。
在开始计算时,算术寄存器S:13和S:14包含DDV运算的被除数,指令执行时,高位有效字S:14存储不整图8-9 DDV指令梯形图符号除的商,低位有效字S:13存储余数。
该指令通常用在产生32位结果的MUL指令之后。
8.1.3 逻辑运算指令逻辑运算指令属于输出指令,包括逻辑与指令(AND)、逻辑或指令(OR)、逻辑异或指令(XOR)和逻辑非指令(NOT)。
逻辑运算指令的功能见表8-9(p184)。
图8-10 DDV指令梯形图符号AND、OR和XOR指令有三个参数:源A、源B和目的地址,源A 和源B的参数可以是字地址或常数,但是两者不能都是常数。
目的地址必须是数据文件字地址。
当输入参数是常数时,可以用运算符“&”修改输入值的基数。
例如,用户可以输入&B11111111111111111或&HFFFF,来代替输入-1作为常数。
NOT指令只有源和目的两个参数,它们必须是数据文件字地址。
AND指令使源地址A的值和源地址B的值按位执行逻辑与运算;OR指令使源地址A的值和源地址B的值按位的值按位执行逻辑异或运算;NOT指令对源地址的值按位执行逻辑非运算。
逻辑运算指令都将结果存储在目的地址内,其算术标志位的影响见表8-10(p184)。
8.1.4 数据转换指令数据转换指令属于输出指令。
数据转换指令的功能见表8-10,可以使数据在整数与BCD码、角度与弧度之间进行转换,还可以实现编码器和译码器的功能。
1.BCD码转换指令图8-11 BCD码转换指令梯形图符号例5:要求将存储在N7:3的整数值32760转换成BCD码。
编程时,将N7:3作为TOD指令的源值,算术寄存器作为目的参数,此时可转换的最大BCD码值可以是32760。
然而,如果BCD码值超过9999,溢出位S:0/1就会被设置为“1”,这将导致次要错误位S:5/0也被置位,因此,需要在梯形图程序结束之前解锁存S:5/0,以避免出现主要错误图8-12 TOD指令应用举例代码0020。
梯形图如右图所示,指令执行后源和目的地址内的地址数据见表8-12(p186)。
在很多应应场合,采用拨码开关输入数据,这些数据都是BCD码格式,在梯形图程序使用这些数据之前,应该把BCD码值转换成整数值,否则,PLC会把这些数据当作整数处理,从而造成数据的丢失或改变。
例6:要求将算术寄存器中的BCD码值转换成整数,并存储在N7:10内,梯形图程序如图8-13所示。