自动往返控制线路ppt课件
合集下载
自动往返控制ppt课件ppt

该技术主要依赖于传感器技术、计算机技术和自动控制技术等核心技术的综合 运用。
自动往返控制原理
传感器检测
控制决策
通过位置传感器实时检测被控对象的位置 信息,并将信息传递给控制器。
执行机构动作
控制器根据接收到的位置信息和预设的控 制规则进行决策,向执行机构发出控制指 令。
反馈调节
执行机构根据接收到的控制指令,驱动被 控对象进行往返运动。
种类
常见的执行器有电动机、液压缸、气动装置等,根据具体的控制需 求和负载特性选择合适的执行器类型。
功能
执行器接收来自控制器的控制信号,转化为相应的机械动作,驱动 自动往返系统完成往返运动或执行特定任务。
03
自动往返控制的工作流程
自动检测
01
02
03
传感器检测
通过专用的传感器检测装 置,实时监测目标位置、 速度和其他相关参数。
远程监控与诊断
通过网络技术,实现对自动往返控制系统的远程监控与故 障诊断。
集成化与模块化
将自动往返控制系统集成到更高级别的自动化系统中,实 现整体自动化水平的提升。同时,采用模块化设计,方便 系统的扩展与维护。
THANK YOU
感谢观看
略,确保自动往返控制的准确性控制精度提高
高精度传感器
引入高精度传感器,提高位置检测精度,确保往 返控制更精准。
控制算法优化
采用先进的控制算法,如PID等,实现更精确的控 制输出,减小误差。
补偿技术
针对系统非线性因素,采用合适的补偿技术,进 一步提高控制精度。
系统稳定性增强
。
种类
根据具体的应用场景,传感器可以 是光电传感器、超声波传感器、磁 性传感器等,用于检测物体的位置 、距离、光线等。
自动往返控制原理
传感器检测
控制决策
通过位置传感器实时检测被控对象的位置 信息,并将信息传递给控制器。
执行机构动作
控制器根据接收到的位置信息和预设的控 制规则进行决策,向执行机构发出控制指 令。
反馈调节
执行机构根据接收到的控制指令,驱动被 控对象进行往返运动。
种类
常见的执行器有电动机、液压缸、气动装置等,根据具体的控制需 求和负载特性选择合适的执行器类型。
功能
执行器接收来自控制器的控制信号,转化为相应的机械动作,驱动 自动往返系统完成往返运动或执行特定任务。
03
自动往返控制的工作流程
自动检测
01
02
03
传感器检测
通过专用的传感器检测装 置,实时监测目标位置、 速度和其他相关参数。
远程监控与诊断
通过网络技术,实现对自动往返控制系统的远程监控与故 障诊断。
集成化与模块化
将自动往返控制系统集成到更高级别的自动化系统中,实 现整体自动化水平的提升。同时,采用模块化设计,方便 系统的扩展与维护。
THANK YOU
感谢观看
略,确保自动往返控制的准确性控制精度提高
高精度传感器
引入高精度传感器,提高位置检测精度,确保往 返控制更精准。
控制算法优化
采用先进的控制算法,如PID等,实现更精确的控 制输出,减小误差。
补偿技术
针对系统非线性因素,采用合适的补偿技术,进 一步提高控制精度。
系统稳定性增强
。
种类
根据具体的应用场景,传感器可以 是光电传感器、超声波传感器、磁 性传感器等,用于检测物体的位置 、距离、光线等。
自动往返控制 ppt
1、位置控制线路与接触器联锁正反转控制线路有什么区别?
2QS 2MK 2QS 1MK2MK H 2BSK 1QS1MK 2MK1MK 1BS3BS 2UF 2MK 1QS W31W21W 11W V11V~3M 21V31V U31U21U11U IUF H 1MKK程开关的作用?
SQ1 SQ2 自 动往返控制, SQ3 SQ4 限 位控制。
SB2 SQ4 SQ4KM2 SQ2SQ2KM1 KM2 H K KM1 SQ3KM2 SQ1 KM1 SB3 SB1 FU2 SQ1 KM2 SQ3 W12W13W W11 M3~V11V V13V12 U11U12U13U FUI H KKM1 F Q E P 123 LLL
课题 自动往返控制线路
主讲人:陈涛
-
1
H K M K B S 2UF H K M WK 31W21W 11W V11V~3M 31V21V 11U 31UU21U 1UF F Q E P 321 LLL
特点:加入了 接触器和按钮, 实现远程控制 和自动控制。
工作原理:按 下按钮,电动 机得电运转, 松开按钮,电
-
11
合上QF,按下SB1,KM1线圈得电, L1 KM1自锁触头闭合自锁(SB1按钮 L2 失效),KM1联锁触头分断对KM2 L3 联锁(SB2按钮失效),KM1主触 头闭合,电动机M正转,工作台左 移,至限定位置撞击SQ1,SQ1辅 助常闭触头先分断,电动机M停止 正转,工作台停止左移。SQ1辅助 常开触头后闭合,KM2线圈得电, KM2自锁触头闭合自锁(SB2按钮 失效),KM2联锁触头分断对KM1 联锁(SB1按钮失效),KM2主触 头闭合,电动机M反转,工作台右 移,至限定位置撞击SQ2,SQ2辅 助常闭触头先分断,电动机M停止
工作台的自动往返控制讲义(PPT 38张)
项目一工作台的自动往返控制
项目一 工作台的自动往返控制
职业核心能力培养探索
Company Logo
1.1项目描述
工农业生产中,有很多的机械设备都是需要往复运动的。例如平 面磨床矩形工作台的往返加工运动、铣床加工中工作台的左右运 动、前后和上下运动,这都需要电气控制线路对电动机实现自动 正反转换相控制来实现
Company Logo
1.3基本控制相关知识
(一)电气图识图及制图标准
一、电工识图的基本要求: 1、从简单到复杂,循序渐进识图。 2、应具有电工、电子基本理论知识。 3、要熟记会用电气图形符号和文字符号。 4、要熟各类电气典型基本电路。 5、掌握各类电气图的绘制特点。 6、把电气图与土建图结合起来看。 7、了解电气图的有关标准和规程。 二、识图的步骤 1、详读图纸说明。 2、识读概略图和框图。 3、读识电气原理图 4、读识电气接线图和安装图
项目一 工作台的自动往返控制
Company Logo
2、接触器工作原理
动铁心(衔铁) 释放弹簧
静铁心
线圈
项目一 工作台的自动往返控制
Company Logo
3、接触器的结构及型号
CJT1系列交流接触器
项目一 工作台的自动往返控制
Company Logo
3、交流接触器常见故障:
1)触头过热 原因:接触压力不足,触点表面氧化, 触点容量不够等。 2)触头磨损 原因:电气磨损或机械磨损 3)线圈失电后触头不能复位 原因:触头被电弧焊在一起了,铁心剩磁太大,弹簧 弹力不足,活动部分被卡住。 4)铁心噪声太大 5)线圈过热或烧毁
(五) 熔断器
作用:短路和严重过载保护 应用:串接于被保护电路的首端 分类:
项目一 工作台的自动往返控制
职业核心能力培养探索
Company Logo
1.1项目描述
工农业生产中,有很多的机械设备都是需要往复运动的。例如平 面磨床矩形工作台的往返加工运动、铣床加工中工作台的左右运 动、前后和上下运动,这都需要电气控制线路对电动机实现自动 正反转换相控制来实现
Company Logo
1.3基本控制相关知识
(一)电气图识图及制图标准
一、电工识图的基本要求: 1、从简单到复杂,循序渐进识图。 2、应具有电工、电子基本理论知识。 3、要熟记会用电气图形符号和文字符号。 4、要熟各类电气典型基本电路。 5、掌握各类电气图的绘制特点。 6、把电气图与土建图结合起来看。 7、了解电气图的有关标准和规程。 二、识图的步骤 1、详读图纸说明。 2、识读概略图和框图。 3、读识电气原理图 4、读识电气接线图和安装图
项目一 工作台的自动往返控制
Company Logo
2、接触器工作原理
动铁心(衔铁) 释放弹簧
静铁心
线圈
项目一 工作台的自动往返控制
Company Logo
3、接触器的结构及型号
CJT1系列交流接触器
项目一 工作台的自动往返控制
Company Logo
3、交流接触器常见故障:
1)触头过热 原因:接触压力不足,触点表面氧化, 触点容量不够等。 2)触头磨损 原因:电气磨损或机械磨损 3)线圈失电后触头不能复位 原因:触头被电弧焊在一起了,铁心剩磁太大,弹簧 弹力不足,活动部分被卡住。 4)铁心噪声太大 5)线圈过热或烧毁
(五) 熔断器
作用:短路和严重过载保护 应用:串接于被保护电路的首端 分类:
《自动往返控制》课件

发展前景
自动往返控制市场前景广阔,将为工业自动化和生 产领域带来更大的便利和效益。
自动往返控制的基本原理
步进电机的原理
步进电机通过电流驱动旋转, 可控制旋转角度和速度。
编码器的原理
编码器用于监测步进电机的运 动状态,将其转化为数字信号。
控制器的原理
控制器发送指令给步进电机, 接收编码器信息,控制设备的 往返运动。
自动往返控制的工作过程
1
步进电机启动
控制器发出启动指令,使步进电机开始
控制器发送指令
2
运动。
控制器发送指定运动方式的指ቤተ መጻሕፍቲ ባይዱ给步进
电机,如速度、方向等。
3
步进电机按指令运动
步进电机根据指令的要求,按照指定的
编码器监测运动状态
4
速度和方向运动。
编码器监测步进电机的运动状态,将其
转化为数字信号。
5
控制器接收编码器信息
控制器接收编码器发送的信息,判断步
停止运动
6
进电机是否达到目标位置。
自动往返控制的实际应用
电子产品组装
自动往返控制常用于电子产 品组装过程中的零部件位置 校正和装配。
机器人自动化加工
自动往返控制可用于机器人 的自动化加工过程,提高生 产效率。
纺织机械行业
自动往返控制在纺织机械行 业中用于控制织布机、印染 设备等的往返运动。
结语
自动往返控制的趋势
随着自动化技术的不断发展,自动往返控制将越来 越广泛应用于各个领域。
轴向位移
步进电机运动过程中产生位置偏移。解决方案: 检查步进电机的传动装置和定位系统。
解决方案
通过优化步进电机的控制方式和调整相关参数, 确保自动往返控制系统正常工作。
自动往返控制电路ppt课件
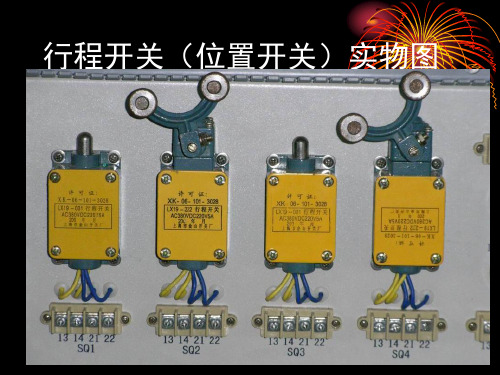
行程开关(位置开关)实物图
行程开关图形符号
由位置开关控制的工作台自动 往返运动示意图
Hale Waihona Puke 工作台自动往返行程控制电路
动作原理
• 为了使电动机的正、反转控制与工作台左 右运动相配合,在控制电路中设置了四个 位置开关SQ1、SQ2、SQ3、SQ4,并把 它们安装在工作台需限位的地方(如图)。
• 其中SQ1和SQ2被用来自动换接电动机正、 反转控制电路,实现工作台的自动往返行 程控制;SQ3和SQ4被用来作为左右极限 位置保护,以防止SQ1和SQ2失灵,工作 台越过限定位置而造成事故。
位置控制与自动往返控制线路ppt

3
4
FU2
熔断器
RL1-15/2
500V、15A、配熔体2A
2
5
KM
接触器
CJ10-20
20A、线圈电压380V
3
6
FR
热继电器 JR16-20/3
三极、20A、整定电流15.4A
1
7 SQ1-SQ4 行程开关
JLXK1
4
8
SB1-SB3
按钮
LA10-3H
保护式、380V、5A、按钮数3位
1
9
XT
接线端子排 JX2-1015
教学重、难点
feature
位置控制与 自动往返控 制线路的工 作原理分析
难点
重点
自动往返控 制线路的工 作原理、安 装与调试方 法
任务引入
什么是位置开关?它的用途是什么? LX19系列行程开关
行程开关的结构: 由操作机构、触头 系统和外壳组成。
行程开关的图形符号:
SQ
SQ
SQ
单轮旋转式
双轮旋转式
任务实施
1、按电路图或接线图从电源端开始,逐段核接线 及线号是否正确,有无漏接、错接之处。检查导线 接点是否符合要求,压接是否牢固。同时注意接点 接触应良好。
五 2、用万用表检查线路的通断情况。对控制电路的
检查 (断开主电路), 可将表棒分别搭在 U11、VII
自 线端上,读数应为“∞”。接下SB1或SB2,读数应
谢 谢!
装 ⒉线槽、元件安装不牢固,每只扣2分。
分
⒊损坏元件每只扣5分。
布 ⒈电机运行正常,不按原理图接线,每处扣5分。
50
线 ⒉布线不符合要求,导线不横平竖直,每根扣3分。
课题三位置控制与自动往返控制分解课件

应用场景的比较
位置控制的应用场景
位置控制在各种工业领域中都有广泛应用,如机械加工、装 配生产线、包装机械等,主要用于精确控制设备的运动位置 。
自动往返控制的应用场景
自动往返控制适用于需要设备按照预定路径自动往复运动的 场景,例如自动化仓库的货架搬运、自动化生产线上的物料 搬运等。
技术发展的趋势与展望
输出信号转换
将数字信号转换为模拟信号,以便于驱动执行机 构。
05
位置控制与自动往返控制的
比较与联系
控制原理的比较
位置控制原理
位置控制是一种基于反馈的控制方法 ,通过比较实际位置与目标位置的差 值,产生控制信号来驱动执行机构, 以减小位置误差。
自动往返控制原理
自动往返控制是在位置控制的基础上 ,增加自动检测和控制的机制,使设 备能够根据设定的路径自动往返运动 ,完成一系列动作。
位置控制技术的发展趋势
随着工业自动化水平的提高,位置控制技术也在不断发展,未来将更加注重高 精度、高速度、智能化和集成化。
自动往返控制技术的发展趋势
自动往返控制技术将朝着更加智能、自主和协同的方向发展,提高设备的自主 导航和路径规划能力,以适应更复杂和动态的工业环境。
06
案例分析
位置控制系统案例
有PID控制、模糊控制等。
执行机构设计
执行机构的作用
01
执行机构是位置控制系统的输出部分,负责将控制器的控制量
转化为实际的位移或动作。
执行机构的类型
02
常见的执行机构类型有电机、气缸、液压缸等,根据不同的应
用场景选择合适的执行机构。
执行机构的驱动方式
03
执行机构的驱动方式有电动、气动、液压等,根据实际需求选
小车自动往返PPT课件
7
(a)位地址表示方式;(b)对应的位置
8
3.间接寻址 间接寻址是指使用地址指针来存取存储器 中的数据。使用前,首先将数据所在单元的 内存地址放入地址指针寄存器中,然后根据 此地址存取数据。S7-200CPU中允许使用 指针进行间接寻址的元器件有I,Q、V、M、 S、T、C。
9
4.1.3顺控指令
S7-200
S7-200 15
4.2任务分析
小车一个工作周期的动作要求如下: (I)按下启动按钮SB(I0.0),小车电机正转(Q1.0),小 车第一次前进,碰到限位开关SQ1(I0.1)后小车电机 反转(Q1.1),小车后退。 (2)小车后退碰到限位开关SQ2(I0.2)后,小车电机M 停转。停5s后,第二次前进,碰到限位开关 SQ3(I0.3),再次后退。 (3)第二次后退碰到限位开关SQ2(I0.2)时,小车停止。
情境4:运料小车的PLC控制
4.1任务资讯 4.2任务分析 4.3任务决策 4.4任务计划 4.5任务实施 4.6评价提高
S7-200
S7-200 1
情境4:运料小车的PLC控制
4.1任务资讯 4.2任务分析 4.3任务决策 4.4任务计划 4.5任务实施 4.6评价提高
S7-200
S7-200 2
22
23
4.4.2PLC资源分配
表5-8 运料小车的控制编程元件分配表
类别
地址 作用
I0.0 启动
输入器件
I0.1 中间限位开关 I0.2 左限位开关
I0.3 右限位开关
输出器件
Q1.0 Q1.1
电机正转 电机反转
M10.0 准备状态
M10.1 第一次前进状态
M10.2 第一次后退状态
(a)位地址表示方式;(b)对应的位置
8
3.间接寻址 间接寻址是指使用地址指针来存取存储器 中的数据。使用前,首先将数据所在单元的 内存地址放入地址指针寄存器中,然后根据 此地址存取数据。S7-200CPU中允许使用 指针进行间接寻址的元器件有I,Q、V、M、 S、T、C。
9
4.1.3顺控指令
S7-200
S7-200 15
4.2任务分析
小车一个工作周期的动作要求如下: (I)按下启动按钮SB(I0.0),小车电机正转(Q1.0),小 车第一次前进,碰到限位开关SQ1(I0.1)后小车电机 反转(Q1.1),小车后退。 (2)小车后退碰到限位开关SQ2(I0.2)后,小车电机M 停转。停5s后,第二次前进,碰到限位开关 SQ3(I0.3),再次后退。 (3)第二次后退碰到限位开关SQ2(I0.2)时,小车停止。
情境4:运料小车的PLC控制
4.1任务资讯 4.2任务分析 4.3任务决策 4.4任务计划 4.5任务实施 4.6评价提高
S7-200
S7-200 1
情境4:运料小车的PLC控制
4.1任务资讯 4.2任务分析 4.3任务决策 4.4任务计划 4.5任务实施 4.6评价提高
S7-200
S7-200 2
22
23
4.4.2PLC资源分配
表5-8 运料小车的控制编程元件分配表
类别
地址 作用
I0.0 启动
输入器件
I0.1 中间限位开关 I0.2 左限位开关
I0.3 右限位开关
输出器件
Q1.0 Q1.1
电机正转 电机反转
M10.0 准备状态
M10.1 第一次前进状态
M10.2 第一次后退状态
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9
10
生产机械运动部件的位置或行程的自动控制。
3
二、新课导入
有些生产机械,如万能铣床,要求工作台在一定的行程 内能自动往返运动,以便实现对工件的连续加工,提高生产 效率。即要求工作台到达指定位置时,不但要求工作台停止 原方向运动,而且还要求它能自动改变方向,向相反的方向 运动。小车工作示意图 Nhomakorabea4
三、新课讲解
动画: 自动往返的过程
7
自动往返控制线路原理图
短路 保护 欠压、失 压保护
过载 保护
自锁 保护
限位 保护
联锁 保护
终端超 程保护
8
四、课堂小结:
自动往返控制线路的构成与工作原理 构成特点:用行程开关控制电动机的双重联锁正反转线路。 即正反转线路+行程开关的复合触头
五、课后作业
画出自动往返控制线路的工作原理图并写出其工作原理
《电机与电气控制》
自动往返控制线路
1
一、复习回顾
问题一 接触器联锁的正反转控制线路工作原理
2
问题二 位置开关? 1、电气符号
2、动作特性: 被撞击时其常闭触头先断开,常开触头后闭合;当撞
击的挡铁移开后触头均会恢复原位。
问题三 什么是位置控制?
答:位置控制就是利用生产机械运动部件上的挡铁与位置
开关碰撞,使其触头动作来接通或断开电路,达到控制
提问:
同学们想一想,能否在接触器联锁正反转控制线路 图的基础上,作一些改进来实现这种自动往返控制?
提示1:
控制工作台在指定位置停车,用位置开关的常闭 触点可以实现,那么再反向起动又该如何控制呢?
提示2:
每只位置开关都有两对触点,一对常开触点和一 对常闭触点。当位置开关动作时, 常闭触点先打开,常 开触点后闭合。如何利用它的这种性质来实现工作 台的自动往返运动?
5
总结出改进方法:
在工作台需限位的两端,各安装一个位置开关SQ1和 SQ2,将它们的常闭触点分别串接在正转控制电路和反转控 制电路中。把它们的常开触点分别并联在相反方向的起动按 钮两端。当位置开关动作后,常闭触点先分断,工作台停止 运动;常开触点后闭合,工作台反向起动运行。
6
想一想:
为了防止在位置开关SQ1、SQ2失灵时行车超越极 限位置而发生事故,需要采取什么措施? (引入终端超程保护)
10
生产机械运动部件的位置或行程的自动控制。
3
二、新课导入
有些生产机械,如万能铣床,要求工作台在一定的行程 内能自动往返运动,以便实现对工件的连续加工,提高生产 效率。即要求工作台到达指定位置时,不但要求工作台停止 原方向运动,而且还要求它能自动改变方向,向相反的方向 运动。小车工作示意图 Nhomakorabea4
三、新课讲解
动画: 自动往返的过程
7
自动往返控制线路原理图
短路 保护 欠压、失 压保护
过载 保护
自锁 保护
限位 保护
联锁 保护
终端超 程保护
8
四、课堂小结:
自动往返控制线路的构成与工作原理 构成特点:用行程开关控制电动机的双重联锁正反转线路。 即正反转线路+行程开关的复合触头
五、课后作业
画出自动往返控制线路的工作原理图并写出其工作原理
《电机与电气控制》
自动往返控制线路
1
一、复习回顾
问题一 接触器联锁的正反转控制线路工作原理
2
问题二 位置开关? 1、电气符号
2、动作特性: 被撞击时其常闭触头先断开,常开触头后闭合;当撞
击的挡铁移开后触头均会恢复原位。
问题三 什么是位置控制?
答:位置控制就是利用生产机械运动部件上的挡铁与位置
开关碰撞,使其触头动作来接通或断开电路,达到控制
提问:
同学们想一想,能否在接触器联锁正反转控制线路 图的基础上,作一些改进来实现这种自动往返控制?
提示1:
控制工作台在指定位置停车,用位置开关的常闭 触点可以实现,那么再反向起动又该如何控制呢?
提示2:
每只位置开关都有两对触点,一对常开触点和一 对常闭触点。当位置开关动作时, 常闭触点先打开,常 开触点后闭合。如何利用它的这种性质来实现工作 台的自动往返运动?
5
总结出改进方法:
在工作台需限位的两端,各安装一个位置开关SQ1和 SQ2,将它们的常闭触点分别串接在正转控制电路和反转控 制电路中。把它们的常开触点分别并联在相反方向的起动按 钮两端。当位置开关动作后,常闭触点先分断,工作台停止 运动;常开触点后闭合,工作台反向起动运行。
6
想一想:
为了防止在位置开关SQ1、SQ2失灵时行车超越极 限位置而发生事故,需要采取什么措施? (引入终端超程保护)