U_Boot第一启动阶段Uboot启动分析笔记-----Stage1(start.S与lowlevel_init.S详解)
U-BOOT启动过程

U-Boot启动过程U-Boot启动内核的过程可以分为两个阶段,两个阶段的功能如下:(1)第一阶段的功能Ø硬件设备初始化Ø加载U-Boot第二阶段代码到RAM空间Ø设臵好栈Ø跳转到第二阶段代码入口(2)第二阶段的功能Ø初始化本阶段使用的硬件设备Ø检测系统内存映射Ø将内核从Flash读取到RAM中Ø为内核设臵启动参数Ø调用内核1.1.1U-Boot启动第一阶段代码分析第一阶段对应的文件是cpu/arm920t/start.S和board/samsung/mini2440/lowlevel_init.S。
U-Boot启动第一阶段流程如下:图 2.1 U-Boot启动第一阶段流程根据cpu/arm920t/u-boot.lds中指定的连接方式:ENTRY(_start)SECTIONS{. = 0x00000000;. = ALIGN(4);.text :{cpu/arm920t/start.o (.text)board/samsung/mini2440/lowlevel_init.o (.text)board/samsung/mini2440/nand_read.o (.text)*(.text)}……}第一个链接的是cpu/arm920t/start.o,因此u-boot.bin的入口代码在cpu/arm920t/start.o中,其源代码在cpu/arm920t/start.S中。
下面我们来分析cpu/arm920t/start.S的执行。
1.硬件设备初始化(1)设臵异常向量cpu/arm920t/start.S开头有如下的代码:.globl _start_start: b start_code /* 复位*/ldr pc, _undefined_instruction /* 未定义指令向量 */ldr pc, _software_interrupt /* 软件中断向量*/ldr pc, _prefetch_abort /* 预取指令异常向量 */ldr pc, _data_abort /* 数据操作异常向量 */ldr pc, _not_used /* 未使用 */ldr pc, _irq /* irq中断向量 */ldr pc, _fiq /* fiq中断向量 *//* 中断向量表入口地址 */_undefined_instruction: .word undefined_instruction_software_interrupt: .word software_interrupt_prefetch_abort: .word prefetch_abort_data_abort: .word data_abort_not_used: .word not_used_irq: .word irq_fiq: .word fiq.balignl 16,0xdeadbeef以上代码设臵了ARM异常向量表,各个异常向量介绍如下:表 2.1 ARM异常向量表在cpu/arm920t/start.S中还有这些异常对应的异常处理程序。
uboot启动流程
U-Boot工作过程U-Boot启动内核的过程可以分为两个阶段,两个阶段的功能如下:(1)第一阶段的功能硬件设备初始化加载U-Boot第二阶段代码到RAM空间设置好栈跳转到第二阶段代码入口(2)第二阶段的功能初始化本阶段使用的硬件设备检测系统内存映射将内核从Flash读取到RAM中为内核设置启动参数调用内核1.1.1 U-Boot启动第一阶段代码分析第一阶段对应的文件是cpu/arm920t/和board/samsung/mini2440/。
U-Boot启动第一阶段流程如下:图 U-Boot启动第一阶段流程根据cpu/arm920t/中指定的连接方式:ENTRY(_start)SECTIONS{. = 0x00000000;. = ALIGN(4);.text :{cpu/arm920t/ (.text)board/samsung/mini2440/ (.text)board/samsung/mini2440/ (.text)*(.text)}… …}第一个链接的是cpu/arm920t/,因此的入口代码在cpu/arm920t/中,其源代码在cpu/arm920t/中。
下面我们来分析cpu/arm920t/的执行。
1. 硬件设备初始化(1)设置异常向量cpu/arm920t/开头有如下的代码:.globl _start_start: b start_code /* 复位*/ldr pc, _undefined_instruction /*未定义指令向量 */ldr pc, _software_interrupt /* 软件中断向量 */ldr pc, _prefetch_abort /* 预取指令异常向量 */ldr pc, _data_abort /* 数据操作异常向量 */ldr pc, _not_used /* 未使用 */ldr pc, _irq /* irq中断向量 */ldr pc, _fiq /* fiq中断向量 */ /* 中断向量表入口地址 */_undefined_instruction: .word undefined_instruction_software_interrupt: .word software_interrupt_prefetch_abort: .word prefetch_abort_data_abort: .word data_abort_not_used: .word not_used_irq: .word irq_fiq: .word fiq.balignl 16,0xdeadbeef以上代码设置了ARM异常向量表,各个异常向量介绍如下:表 ARM异常向量表在cpu/arm920t/中还有这些异常对应的异常处理程序。
BOOT详解
1 U-Boot简介U-Boot,全称Universal BootLoader,是遵循GPL条款的开放源码项目。
从FADSROM、8xxROM、PPCBOOT逐步发展演化而来。
其源码目录、编译形式与Linux内核很相似,事实上,不少U-Boot源码就是相应的Linux内核源程序的简化,尤其是一些设备的驱动程序,这从U-Boot源码的注释中能体现这一点。
但是U-Boot不仅仅支持嵌入式Linux系统的引导,当前,它还支持NetBSD,VxWorks, QNX, RTEMS, ARTOS,LynxOS嵌入式操作系统。
其目前要支持的目标操作系统是OpenBSD, NetBSD,FreeBSD,4.4BSD, Linux, SVR4, Esix, Solaris, Irix, SCO, Dell, NCR,VxWorks, LynxOS, pSOS, QNX, RTEMS,ARTOS。
这是U-Boot中Universal的一层含义,另外一层含义则是U-Boot除了支持PowerPC系列的处理器外,还能支持MIPS、x86、ARM、NIOS、XScale等诸多常用系列的处理器。
这两个特点正是U-Boot 项目的开发目标,即支持尽可能多的嵌入式处理器和嵌入式操作系统。
就目前来看,U-Boot 对PowerPC系列处理器支持最为丰富,对Linux的支持最完善。
其它系列的处理器和操作系统基本是在2002年11月PPCBOOT改名为U-Boot后逐步扩充的。
从PPCBOOT向U-Boot 的顺利过渡,很大程度上归功于U-Boot的维护人德国DENX软件工程中心WolfgangDenk[以下简称W.D]本人精湛专业水平和持着不懈的努力。
当前,U-Boot项目正在他的领军之下,众多有志于开放源码BOOTLOADER移植工作的嵌入式开发人员正如火如荼地将各个不同系列嵌入式处理器的移植工作不断展开和深入,以支持更多的嵌入式操作系统的装载与引导。
am335xu-boot启动过程分析

am335xu-boot启动过程分析 u-boot属于两阶段的bootloader,第⼀阶段的⽂件为 arch/arm/cpu/armv7/start.S 和 arch/arm/cpu/armv7/lowlevel_init.S,前者是平台相关的,后者是开发板相关的。
1. u-boot第⼀阶段代码分析 (1)硬件设备初始化 将CPU的⼯作模式设为管理模式(SVC); 关闭中断; 禁⽤MMU,TLB ; 板级初始化; (2)为加载Bootloader的第⼆阶段代码准备RAM空间 加载u-boot.img,跳转到u-boot.img; 上述⼯作,也就是uboot-spl代码流程的核⼼。
代码如下:arch/arm/cpu/armv7/start.S1/*2 * the actual reset code3*/4reset:5 bl save_boot_params6/*7 * disable interrupts (FIQ and IRQ), also set the cpu to SVC32 mode,8 * except if in HYP mode already9*/10 mrs r0, cpsr11 and r1, r0, #0x1f @ mask mode bits12 teq r1, #0x1a @ test for HYP mode13 bicne r0, r0, #0x1f @ clear all mode bits14 orrne r0, r0, #0x13 @ set SVC mode15 orr r0, r0, #0xc0 @ disable FIQ and IRQ16 msr cpsr,r017@@ 以上通过设置CPSR寄存器⾥设置CPU为SVC模式,禁⽌中断18@@ 具体操作可以参考《[kernel 启动流程] (第⼆章)第⼀阶段之——设置SVC、关闭中断》的分析1920/* the mask ROM code should have PLL and others stable */21#ifndef CONFIG_SKIP_LOWLEVEL_INIT22 bl cpu_init_cp1523@@ 调⽤cpu_init_cp15,初始化协处理器CP15,从⽽禁⽤MMU和TLB。
Uboot启动流程分析和移植介绍
基于MPC83xx 的U-boot 启动流程分析和移植董 闯北京邮电大学信息与通信工程学院,北京(100876)E-mail :donix.dong@摘 要:本文首先引入Bootloader 的概念,接着介绍U-boot 这种引导程序,并以Freescale 32位微处理器MPC83xx 为例,结合代码详细分析了U-boot 的启动的各个阶段及最终引导Linux 内核的过程,最后,建立交叉编译环境,针对TC8313E 目标板,给出U-boot 移植与编译的基本步骤。
关键词:U-boot;MPC83xx;交叉编译;移植;嵌入式系统中图分类号:TP393.051.引言引导程序(Bootloader)是系统加电后运行的第一段软件代码,类似于PC 机中的引导加载程序BIOS 。
虽然引导程序仅在系统启动时运行非常短的时间,但对于嵌入式系统来说,这是一个非常重要的组成部分。
通过这段小程序,初始化必要的硬件设备,创建内核需要的一些信息并将这些信息传递给内核,从而将系统的软、硬件环境配置到一个合适的状态,最终调用操作系统内核,真正起到引导和加载内核的作用。
2. U-boot 介绍目前,嵌入式领域里出现了很多种类的Bootloader ,如Armboot 、Blob 、Redboot 、vivi 和U-boot 等,其中U-boot 是使用最广泛,功能最完善的。
U-boot (Universal Boot Loader)是从PPCBOOT 发展演化而来[1],其源码目录、编译形式与Linux 内核很相似,事实上,不少U-boot 源码就是相应的Linux 内核源程序的简化,尤其是一些设备的驱动程序,这从U-boot 源码的注释中就能体现。
U-boot 中Universal 有两层含义,一是U-boot 除了支持PowerPC 系列的处理器外,还能支持MIPS 、x86、ARM 、NIOS 、XScale 等诸多常用系列的处理器;另外一层含义则是U-boot 不仅仅支持嵌入式Linux 操作系统的引导,还支持OpenBSD, NetBSD, FreeBSD, SVR4, Solaris, VxWorks, LynxOS, pSOS, lrix, RTEMS, QNX, ARTOS 等操作系统的引导。
uboot分析之bootm

uboot分析之bootmbootm命令执⾏过程中调⽤了bootm_start函数,这个函数⽐较重要,所以先分析它。
mon/cmd_bootm.cCpp代码1. static int bootm_start(cmd_tbl_t *cmdtp, int flag, int argc, char *argv[])2. {3. void *os_hdr;4. int ret;5. memset ((void *)&images, 0, sizeof (images));//images是⼀个bootm_headers_t类型的全局变量。
见下⾯的分析。
6. images.verify = getenv_yesno ("verify");//从环境变量中检查是否要对镜像的数据(不是镜像头)进⾏校验。
7. bootm_start_lmb();//不做任何有意义的⼯作,除了定义# define lmb_reserve(lmb, base, size)8. /* get kernel image header, start address and length */寻找可⽤的内核镜像,见下⾯的分析。
主要根据传⼊的参数检查镜像的合法性并获取信息。
9. os_hdr = boot_get_kernel (cmdtp, flag, argc, argv,10. &images, &images.os.image_start, &images.os.image_len);//返回指向内存中镜像头的指针11. if (images.os.image_len == 0) {12. puts ("ERROR: can't get kernel image!\n");13. return 1;14. }15. /* get image parameters */16. switch (genimg_get_format (os_hdr)) {//根据镜像魔数获取镜像类型17. case IMAGE_FORMAT_LEGACY:18. images.os.type = image_get_type (os_hdr);//镜像类型19. p = image_get_comp (os_hdr);//压缩类型20. images.os.os = image_get_os (os_hdr);//操作系统类型21. images.os.end = image_get_image_end (os_hdr);//当前镜像的尾地址22. images.os.load = image_get_load (os_hdr);//镜像数据的载⼊地址23. break;24. default:25. puts ("ERROR: unknown image format type!\n");26. return 1;27. }28. /* find kernel entry point */29. if (images.legacy_hdr_valid) {//如果镜像已经通过验证30. images.ep = image_get_ep (&images.legacy_hdr_os_copy);//获取⼊⼝地址,填充images.ep 。
uboot分析和笔记
uboot一、uboot是ppcboot和armboot合并而成,现在主流的bootloader为uboot和redboot二、bootm addr_kernel addr_initrd三、移植uboot时最好(一定)要找到一个自己板子的原形(即自己的板子是在这个板子上做一些修改而来的)的版本,这样就可以事半功倍。
这样要修改的地方就比较少,也比较容易了。
uboot支持很多平台,与一个具体平台相关的主要有三个地方:1、./include/configs/xxxxx.h, 主要定义了flash、sdram的起始地址等信息,一般要修改flash的起始地址、大小,有时候会有位宽等。
2、./board/xxxxx/*,这个目录下主要有两三个.c文件,主要为该平台的初始化和flash操作的函数。
有时候flash的操作需要修改,不过一般都是找一个现有的支持该flash的驱动,一般情况在uboot 别的./board/平台下就会有现成的,拷贝过了就可以了。
3、./cpu/xxxxxx/arch_xxx/xxxxxx/*, 一般是此cpu的初始等函数。
四、具体移植的时候最多涉及到的会是./include/configs/xxxx.h,如果有现成的平台(uboot现在支持绝大部分我们常用的平台),可能只需要对着原来的xxxx.h文件,修改几个我们在硬件上修改了的地方,一般会是flash的起始地址、大小;内存大小(内存的起始地址应该都是0);uboot设置信息保存的地址和长度;console 口和它的波特率;默认的设置;uboot的入口地址等(具体情况可能会有一些变化),如果不是从相同的平台移植,可能会比较麻烦,因为这时候要修改一些和此cpu相关的一些寄存器、频率和内存等硬件方面的东西了(也在这个xxxx.h中),虽然这时改动的地方也不多,但是会很痛苦,因为经常不知道要改哪里或者改为多少。
所以可能需要参考cpu的datasheet和到网上找一些资料了并且慢慢试了。
U-Boot启动过程--详细版的完全分析
(一)U-Boot启动过程--详细版的完全分析我们知道,bootloader是系统上电后最初加载运行的代码。
它提供了处理器上电复位后最开始需要执行的初始化代码。
在PC机上引导程序一般由BIOS开始执行,然后读取硬盘中位于MBR(Main Boot Record,主引导记录)中的Bootloader(例如LILO或GRUB),并进一步引导操作系统的启动。
然而在嵌入式系统中通常没有像BIOS那样的固件程序,因此整个系统的加载启动就完全由bootloader来完成。
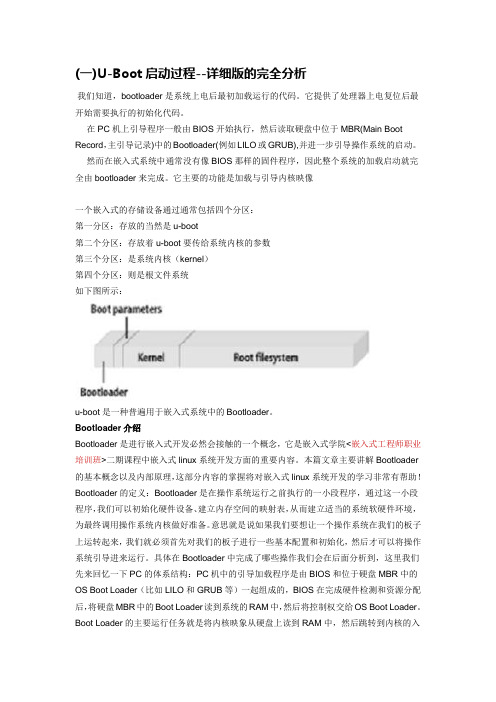
它主要的功能是加载与引导内核映像一个嵌入式的存储设备通过通常包括四个分区:第一分区:存放的当然是u-boot第二个分区:存放着u-boot要传给系统内核的参数第三个分区:是系统内核(kernel)第四个分区:则是根文件系统如下图所示:u-boot是一种普遍用于嵌入式系统中的Bootloader。
Bootloader介绍Bootloader是进行嵌入式开发必然会接触的一个概念,它是嵌入式学院<嵌入式工程师职业培训班>二期课程中嵌入式linux系统开发方面的重要内容。
本篇文章主要讲解Bootloader 的基本概念以及内部原理,这部分内容的掌握将对嵌入式linux系统开发的学习非常有帮助!Bootloader的定义:Bootloader是在操作系统运行之前执行的一小段程序,通过这一小段程序,我们可以初始化硬件设备、建立内存空间的映射表,从而建立适当的系统软硬件环境,为最终调用操作系统内核做好准备。
意思就是说如果我们要想让一个操作系统在我们的板子上运转起来,我们就必须首先对我们的板子进行一些基本配置和初始化,然后才可以将操作系统引导进来运行。
具体在Bootloader中完成了哪些操作我们会在后面分析到,这里我们先来回忆一下PC的体系结构:PC机中的引导加载程序是由BIOS和位于硬盘MBR中的OS Boot Loader(比如LILO和GRUB等)一起组成的,BIOS在完成硬件检测和资源分配后,将硬盘MBR中的Boot Loader读到系统的RAM中,然后将控制权交给OS Boot Loader。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Uboot启动分析笔记-----Stage1(start.S与lowlevel_init.S详解)Uboot启动分析笔记-----Stage1(start.S与lowlevel_init.S详解)1 u-boot.lds首先了解uboot的链接脚本board/my2410/u-boot.lds,它定义了目标程序各部分的链接顺序。
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")/*指定输出可执行文件为ELF格式,32为,ARM小端*/OUTPUT_ARCH(arm)/*指定输出可执行文件为ARM平台*/ENTRY(_start)/*起始代码段为_start*/SECTIONS{/* 指定可执行image文件的全局入口点,通常这个地址都放在ROM(flash)0x0位置*、. = 0x00000000;从0x0位置开始. = ALIGN(4); 4字节对齐.text :{cpu/arm920t/start.o (.text)board/my2440/lowlevel_init.o (.text)*(.text)}. = ALIGN(4);.rodata : { *(SORT_BY_ALIGNMENT(SORT_BY_NAME(.rodata*))) }. = ALIGN(4);.data : { *(.data) } /* 只读数据段,所有的只读数据段都放在这个位置*/. = ALIGN(4);.got : { *(.got) } /*指定got段, got段式是uboot自定义的一个段, 非标准段*/. = .;__u_boot_cmd_start = .; /*把__u_boot_cmd_start赋值为当前位置, 即起始位置*/.u_boot_cmd : { *(.u_boot_cmd) }/* u_boot_cmd段,所有的u-boot命令相关的定义都放在这个位置,因为每个命令定义等长,所以只要以__u_boot_cmd_start为起始地址进行查找就可以很快查找到某一个命令的定义,并依据定义的命令指针调用相应的函数进行处理用户的任务*/__u_boot_cmd_end = .;/* u_boot_cmd段结束位置,由此可以看出,这段空间的长度并没有严格限制,用户可以添加一些u-boot的命令,最终都会在连接是存放在这个位置。
*/. = ALIGN(4);__bss_start = .; /*把__bss_start赋值为当前位置,即bss段的开始位置*/.bss (NOLOAD) : { *(.bss) . = ALIGN(4); } /*指定bss段,这里NOLOAD的意思是这段不需装载,仅在执行域中才会有这段*/_end = .; /*把_end赋值为当前位置,即bss段的结束位置*/}第一个链接的是cpu/board/start.o,也即Uboot的入口指令在start中,下面详细分析程序的跳转和函数调用关系。
2 Stage1 : cpu/arm920t/start.S这个汇编程序时UBoot的入口程序,以复位向量开头。
reset↓cpu_init_crit↓relocate↓stack_setup↓start_armboot()↓init_sequence[]↓getenv()↓main_loop()其中前面4步为Stage1下面来详细分析一下cpu/arm920t/start.S这里以ARM9 2410为例,2440移植时需要修改一些配置,具体的再后面的移植中介绍. /* 这段代码的主要作用:进入SVC模式关闭看门狗屏蔽所有IRG掩码设置时钟频率 FCLK HCLK PCLK清楚I/D Cache禁止MMU和CACHE配置memory control重定位:如果代码不在指定的地址上需要把uboot从当前位置copy到RAM指定位置上建立堆栈,为进入C函数做准备清0 .bss段跳入start_armboot函数进入stage2(lib_arm/board.c)*/.globl _start_start: /* 系统复位位置, 各个异常向量对应的跳转代码 */b reset /* 复位向量 */ldr pc, _undefined_instruction /* 未定义的指令异常向量 */ldr pc, _software_interrupt /* 软件中断异常向量 */ldr pc, _prefetch_abort /* 预取指令操作异常向量 */ldr pc, _data_abort /* 数据操作异常向量 */ldr pc, _not_used /* 未使用 */ldr pc, _irq /* 慢速中断异常向量 */ldr pc, _fiq /* 快速中断异常向量 */_undefined_instruction:.word undefined_instruction_software_interrupt:.word software_interrupt_prefetch_abort:.word prefetch_abort_data_abort:.word data_abort_not_used:.word not_used_irq:.word irq_fiq:.word fiq.balignl 16,0xdeadbeef/**ARM9支持7种异常。
下面是异常的响应过程*第一个复位异常,它放在0x0的位置,一上电就执行它,而且我们的程序总是从复位异常处理程序* 开始执行的,因此复位异常处理程序不需要返回。
*其他异常处理的如下:*当一个异常出现以后,ARM会自动执行以下几个步骤:*(1) 把下一条指令的地址放到连接寄存器LR(通常是R14),这样就能够在处理异常返回时从正确的位置继续执行。
*(2) 将相应的CPSR(当前程序状态寄存器)复制到SPSR(备份的程序状态寄存器)中。
从异常退出的时候,就可以由SPSR来恢复CPSR。
*(3) 根据异常类型,强制设置CPSR的运行模式位。
*(4) PC(程序计数器)被强制成相关异常向量处理函数地址,从而跳转到相应的异常处理程序中。
* 当异常处理完毕后,ARM会执行以下几步操作从异常返回:*(1)将连接寄存器LR的值减去相应的偏移量后送到PC中*(2) 将SPSR复制回CPSR中*(3) 若在进入异常处理时设置了中断禁止位,要在此清除** ARM规定了异常向量的地址:* b reset ;复位 0x0* ldr pc, _undefined_instruction ;未定义的指令异常 0x4* ldr pc, _software_interrupt ;软件中断异常 0x8* ldr pc, _prefetch_abort ;预取指令 0xc* ldr pc, _data_abort ;数据 0x10* ldr pc, _not_used ;未使用 0x14* ldr pc, _irq ;慢速中断异常 0x18* ldr pc, _fiq ;快速中断异常 0x1c* 当处理器碰到异常时,PC会被强制设置为对应的异常向量,从而跳转到* 相应的处理程序,然后再返回到主程序继续执行。
* .balignl 16,0xdeadbeef, 将地址对齐到16的倍数,如果地址寄存器的值(PC)跳过4个字节才是16的倍数,* 则使用0xdeadbeef填充这4个字节,如果它跳过1、2、3个字节,则填充值不确定。
如果地址寄存器的值(PC)是16的倍数,则无需移动。
********************//************************************************************************** Startup Code (reset vector) ………………….*************************************************************************/ /* 保存变量的数据区 */_TEXT_BASE:.word TEXT_BASE ;定义一个字并分配空间 4bytes.globl _armboot_start_armboot_start:.word _start ;声明一个全局的,并用 _start 初始化它, 在u-boot.lds中定义/* These are defined in the board-specific linker script.*/.globl _bss_start_bss_start:.word __bss_start.globl _bss_end_bss_end:.word _end#ifdef CONFIG_USE_IRQ/* IRQ stack memory (calculated at run-time) */.globl IRQ_STACK_STARTIRQ_STACK_START:.word 0x0badc0de/* IRQ stack memory (calculated at run-time) */.globl FIQ_STACK_STARTFIQ_STACK_START:.word 0x0badc0de#endif/* the actual reset code*//* 系统的复位代码。
系统一上电,就跳到这里运行 */reset:mrs r0,cpsr /* 取得当前程序状态寄存器cpsr到r0 */bic r0,r0,#0x1f /* 这里使用位清除指令,把中断全部清除,只置位模式控制位为中断提供服务通常是 OS设备驱动程序的责任,因此在 Boot Loader 的执行全过程中可以不必响应任何中断*/orr r0,r0,#0xd3 /* 计算为超级保护模式,并disable IRQ和FIQ */msr cpsr,r0 /* 设置cpsr为超级保护模式 *//******************CPSR 的底8位为I F T M4 M3 M2 M1 M0 IRQdisable FIQdisable StateBitSVC[M4~M0] = 10011StateBit = set:THUMB state, others:ARM state* 设置cpu运行在SVC32模式。
ARM9共有7种模式:* 用户模式(usr): arm处理器正常的程序执行状态* 快速中断模式(fiq):用于高速数据传输或通道处理* 外部中断模式(irq):用于通用的中断处理* 超级保护模式(svc):操作系统使用的保护模式* 数据访问终止模式(abt):当数据或指令预取终止时进入该模式,可用于虚拟存储及存储保护* 系统模式(sys):运行具有特权的操作系统任务* 未定义指令中止模式(und):当未定义的指令执行时进入该模式,可用于支持硬件协处理器的软件仿真* 通过设置ARM的CPSR寄存器,让CPU运行在操作系统保护模式,为后面进行其它操作作好准备了。