【CN109815617A】一种仿真模型驱动方法【专利】
【CN109801536A】一种数学模型动态展示装置【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910203199.0(22)申请日 2019.03.18(71)申请人 郑州航空工业管理学院地址 450000 河南省郑州市郑东新区文苑西路15号申请人 河南交通职业技术学院(72)发明人 刘燕 李云川 常丽 石磊 陈华荣 (74)专利代理机构 西安铭泽知识产权代理事务所(普通合伙) 61223代理人 俞晓明(51)Int.Cl.G09B 23/02(2006.01)(54)发明名称一种数学模型动态展示装置(57)摘要本发明公开了一种数学模型动态展示装置,其支撑底板上通过支撑墩固定有由12个杆体作为各个棱的正四方体框架,正四方体框架包括4根用于确定X轴坐标值刻度的第一杆体、4根用于确定Y轴坐标值刻度的第二杆体及4根用于确定Z轴坐标值刻度的第三杆体,各杆体上均滑动连接有光束发射机构;支撑底板上置有在支撑底板上能移动位置的基座,基座上设有转台,转台上固定有长度可调的竖向支杆,竖向支杆的上端固定有数学模型卡接座,转台通过控制开关与电源模块电连接。
本发明装置能够使学生很好的将模型上的各点与三维空间坐标轴联系起来,使学生深刻的体会数学模型与坐标系之间的具体位置关系及相应的坐标数值对应关系,加深了其对数学模型的理解。
权利要求书1页 说明书3页 附图2页CN 109801536 A 2019.05.24C N 109801536A权 利 要 求 书1/1页CN 109801536 A1.一种数学模型动态展示装置,包括支撑底板(1),其特征在于,所述支撑底板(1)上沿其周向固定有4个支撑墩(2),支撑墩(2)上固定有由12个杆体作为各个棱所构成的正四方体框架,所述正四方体框架包括4根在空间直角坐标系中用于确定数学模型(11)上的某点的X轴坐标值的第一杆体(3)、4根在空间直角坐标系中用于确定数学模型(11)上的某点的Y 轴坐标值的第二杆体(4)以及4根在空间直角坐标系中用于确定数学模型(11)上的某点的Z 轴坐标值的第三杆体(5);所述第一杆体(3)、第二杆体(4)以及第三杆体(5)上沿杆长均设有坐标值刻度(14),且各杆体上均套设有与其滑动连接的光束发射机构(6),各光束发射机构(6)发出的光束(16)均垂直于该光束发射机构(6)所在的杆体;所述第一杆体(3)平行于空间直角坐标系的X轴,第二杆体(4)平行于空间直角坐标系的Y轴,第三杆体(5)平行于空间直角坐标系的Z轴,且空间直角坐标系的坐标原点(12)位于所述正四方体框架内部;所述支撑底板(1)上置有在支撑底板(1)上能移动位置的基座(7),基座(7)上设有转台,转台上固定有长度可调的竖向支杆(8),竖向支杆(8)的上端固定有数学模型卡接座(17),所述转台通过控制开关与电源模块电连接。
【CN109801540A】一种模拟胎动的装置【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910168088.0(22)申请日 2019.03.06(71)申请人 北京工业大学地址 100124 北京市朝阳区平乐园100号(72)发明人 李旭雯 张强 张艺松 杨琳 张松 杨益民 郝冬梅 (74)专利代理机构 北京思海天达知识产权代理有限公司 11203代理人 吴荫芳(51)Int.Cl.G09B 23/28(2006.01)(54)发明名称一种模拟胎动的装置(57)摘要本发明涉及一种模拟胎动的装置,属于医疗器械技术领域,包括孕妇模型、动力系统、控制系统,动力系统用于模拟胎动,包括电子推杆、导轨滑台和电机驱动器;控制系统用于提供控制信号;还可以包括胎动模式设置系统和胎动计数显示系统,胎动模式设置系统用于设置模拟胎动的频率和选择模拟胎动的强度,根据胎动的剧烈程度,强度设置分为4个档。
胎动计数显示系统用于记录并显示模拟胎动的次数。
控制系统通过电机驱动器控制导轨滑台使电子推杆移动到预设的位置;控制系统通过电机驱动器控制电子推杆顶部的仿真婴儿脚碰撞不同位置的仿真皮肤模拟胎动。
控制系统控制电子推杆往复运动的频率、速度、运行时间、启动和停止。
本发明提供一种结构简单的模拟胎动的装置,为模拟胎动提供一种可能性。
权利要求书1页 说明书3页 附图1页CN 109801540 A 2019.05.24C N 109801540A1.一种模拟胎动的装置,其特征在于包括:孕妇模型、动力系统、控制系统,其中,孕妇模型用于模拟孕妇,包括仿真皮肤和孕妇腹部模型;动力系统用于模拟胎动,包括电子推杆、导轨滑台和电机驱动器;控制系统用于提供控制信号;所述的仿真皮肤固定于孕妇腹部模型上,孕妇腹部模型内部安装一个导轨滑台,在滑台上面固定一个电子推杆,在电子推杆的滑动杆顶端装有一个仿真婴儿脚,控制系统通过电机驱动器控制导轨滑台使电子推杆移动到预设的位置,控制系统通过电机驱动器控制电子推杆顶部的仿真婴儿脚碰撞不同位置的仿真皮肤模拟胎动,控制系统控制电子推杆往复运动的频率、速度、运行时间、启动和停止。
【CN109801021A】模型生成方法及装置、信息获取方法及装置【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910119829.6(22)申请日 2019.02.18(71)申请人 惠龙易通国际物流股份有限公司地址 212000 江苏省镇江市长江路758号(72)发明人 施文进 施俊 郁培昌 (74)专利代理机构 北京智桥联合知识产权代理事务所(普通合伙) 11560代理人 商晓莉(51)Int.Cl.G06Q 10/08(2012.01)G06Q 10/06(2012.01)(54)发明名称模型生成方法及装置、信息获取方法及装置(57)摘要本发明实施例提供了一种模型生成方法及装置、信息获取方法及装置,该模型生成方法包括:筛选出符合指定条件的货主用户;对于符合指定条件的货主用户,获取所述货主用户的运输历史记录;利用机器学习算法对获取的运输历史记录进行训练,生成承运指导价格评估模型。
信息获取方法包括:接收信息获取请求,响应于所述信息获取请求,获取待运输货物信息;将所述待运输货物信息输入承运指导价格评估模型,得到待运输货物的承运指导价格。
本发明实施例提供的技术方案在一定程度上解决了货物运输效率比较低的问题。
权利要求书2页 说明书8页 附图2页CN 109801021 A 2019.05.24C N 109801021A权 利 要 求 书1/2页CN 109801021 A1.一种模型生成方法,其特征在于,所述方法包括:筛选出符合指定条件的货主用户;对于符合指定条件的货主用户,获取所述货主用户的运输历史记录;利用机器学习算法对获取的运输历史记录进行训练,生成承运指导价格评估模型。
2.根据权利要求1所述的方法,其特征在于,筛选出符合指定条件的货主用户,包括:获取各货主用户的运输历史记录,所述运输历史记录中包括每次运输的起始地和对应的货运量;对于每个货主用户,针对相同的起始地,根据对应的货运量获取每个起始地的货运量总量;根据预设的货运量阈值,判断是否存在货运量总量大于或者等于货运量阈值的起始地,如果存在,识别出对应的货主用户满足指定条件。
【CN109823234B】一种驱动系统的控制方法、驱动系统及新能源汽车【专利】

(19)中华人民共和国国家知识产权局(12)发明专利(10)授权公告号 (45)授权公告日 (21)申请号 201910327849.2(22)申请日 2019.04.23(65)同一申请的已公布的文献号申请公布号 CN 109823234 A (43)申请公布日 2019.05.31(73)专利权人 上海汽车集团股份有限公司地址 201203 上海市浦东新区张江高科技园区松涛路563号1号楼509室(72)发明人 王东萃 朱军 王健 王林 武四辈 伍宇飚 孔金城 (74)专利代理机构 北京信远达知识产权代理有限公司 11304代理人 魏晓波(51)Int.Cl.B60L 58/25(2019.01)H02P 21/14(2016.01)(56)对比文件CN 103560304 A ,2014.02.05,说明书中具体实施方式和附图1-11.CN 108306078 A ,2018.07.20,具体实施方式和附图.CN 204289653 U ,2015.04.22,具体实施方式和附图.CN 104538701 A ,2015.04.22,具体实施方式和附图.CN 102668229 A ,2012.09.12,具体实施方式和附图.JP 2010238553 A ,2010.10.21,全文.审查员 张艳芬(54)发明名称一种驱动系统的控制方法、驱动系统及新能源汽车(57)摘要本申请公开了一种驱动系统的控制方法、驱动系统及新能源汽车。
该方法实时获取动力电池当前的温度值;温度值低于第一预设温度阈值时为其升温以恢复驱动系统驱动能力。
电机控制器向电机施加周期性交变电压矢量,利用电压矢量调制动力电池的母线电流交变,此过程中驱动电池反复周期性地充放电使得电池温度升高。
直到温度值达第二预设温度阈值,电池已升温至理想的工作温度,电机控制器停止施加电压矢量。
对动力电池进行加热过程中电机三相绕组和三组桥臂均被使用。
【CN109817150A】一种像素驱动方法、像素驱动装置及显示装置【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910242365.8(22)申请日 2019.03.28(71)申请人 京东方科技集团股份有限公司地址 100015 北京市朝阳区酒仙桥路10号申请人 北京京东方光电科技有限公司(72)发明人 韩文超 孙伟 肖文俊 孟昭晖 (74)专利代理机构 北京银龙知识产权代理有限公司 11243代理人 许静 黄灿(51)Int.Cl.G09G 3/20(2006.01)(54)发明名称一种像素驱动方法、像素驱动装置及显示装置(57)摘要本发明提供一种像素驱动方法、像素驱动装置及显示装置,其中,像素驱动方法,包括:按照预设顺序依次向多条栅线提供栅极扫描信号,在向每一条栅线提供栅极扫描信号时,向各数据线输入对应的驱动信号;其中,在一帧画面的显示时间内向各数据线输入的驱动信号包括第一驱动信号和第二驱动信号,所述第一驱动信号与所述第二驱动信号为相邻的两次驱动信号且所述第一驱动信号对应的各子像素的颜色与所述第二驱动信号对应的各子像素的颜色相同。
本发明提供的像素驱动方法、像素驱动装置及显示装置,能够在显示纯色画面时降低显示装置的功耗。
权利要求书3页 说明书11页 附图8页CN 109817150 A 2019.05.28C N 109817150A权 利 要 求 书1/3页CN 109817150 A1.一种像素驱动方法,应用于阵列基板,其特征在于,所述阵列基板包括设置在交叉的多条栅线、多条数据线中的多个子像素;其中,相邻两条数据线之间设置有两列子像素,且每条数据线与其两侧的子像素连接;每行子像素对应有分设于该行子像素两侧的两条栅线,一条栅线与该行奇数位子像素连接,另一条栅线与该行偶数位子像素连接;所述像素驱动方法,包括:按照预设顺序依次向多条栅线提供栅极扫描信号,在向每一条栅线提供栅极扫描信号时,向各数据线输入对应的驱动信号;其中,在一帧画面的显示时间内向各数据线输入的驱动信号包括第一驱动信号和第二驱动信号,所述第一驱动信号与所述第二驱动信号为相邻的两次驱动信号且所述第一驱动信号对应的各子像素的颜色与所述第二驱动信号对应的各子像素的颜色相同。
【CN109888870A】一种电机驱动控制装置及控制方法【专利】
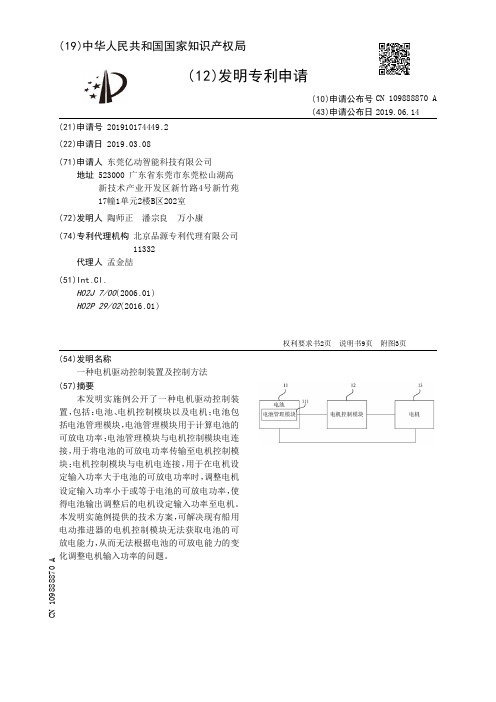
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910174449.2(22)申请日 2019.03.08(71)申请人 东莞亿动智能科技有限公司地址 523000 广东省东莞市东莞松山湖高新技术产业开发区新竹路4号新竹苑17幢1单元2楼B区202室(72)发明人 陶师正 潘宗良 万小康 (74)专利代理机构 北京品源专利代理有限公司11332代理人 孟金喆(51)Int.Cl.H02J 7/00(2006.01)H02P 29/02(2016.01)(54)发明名称一种电机驱动控制装置及控制方法(57)摘要本发明实施例公开了一种电机驱动控制装置,包括:电池、电机控制模块以及电机;电池包括电池管理模块,电池管理模块用于计算电池的可放电功率;电池管理模块与电机控制模块电连接,用于将电池的可放电功率传输至电机控制模块;电机控制模块与电机电连接,用于在电机设定输入功率大于电池的可放电功率时,调整电机设定输入功率小于或等于电池的可放电功率,使得电池输出调整后的电机设定输入功率至电机。
本发明实施例提供的技术方案,可解决现有船用电动推进器的电机控制模块无法获取电池的可放电能力,从而无法根据电池的可放电能力的变化调整电机输入功率的问题。
权利要求书2页 说明书9页 附图3页CN 109888870 A 2019.06.14C N 109888870A权 利 要 求 书1/2页CN 109888870 A1.一种电机驱动控制装置,其特征在于,包括:电池、电机控制模块以及电机;所述电池包括电池管理模块,所述电池管理模块用于计算所述电池的可放电功率;所述电池管理模块与所述电机控制模块电连接,用于将所述电池的可放电功率传输至所述电机控制模块;所述电机控制模块与所述电机电连接,用于在电机设定输入功率大于所述电池的可放电功率时,调整所述电机设定输入功率小于或等于所述电池的可放电功率,使得所述电池输出调整后的所述电机设定输入功率至所述电机。
【CN110912447A】一种基于爬行原理的压电旋转驱动平台【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910291764.3(22)申请日 2019.04.08(71)申请人 浙江师范大学地址 321004 浙江省金华市婺城区迎宾大道688号(72)发明人 万嫩 李建平 胡意立 (51)Int.Cl.H02N 2/14(2006.01)H02N 2/12(2006.01)(54)发明名称一种基于爬行原理的压电旋转驱动平台(57)摘要本发明涉及一种基于爬行原理的压电旋转驱动平台。
该平台主要由两组压电驱动单元、弹簧垫片、转子、预紧螺母、螺钉轴、螺钉和底座组成,其中压电驱动单元包括压电叠堆、预紧楔块、薄壁式柔性铰链机构。
两组薄壁式柔性铰链机构可实现寄生惯性运动;两个压电叠堆分别斜置安装在两个薄壁式柔性铰链机构内,通过两组薄壁式柔性铰链机构的寄生惯性运动实现转子的旋转驱动。
本发明采用两组驱动单元,对两组电压进行时序控制,两组驱动单元交替工作,可消除回退现象,提高输出性能。
该平台可实现高效旋转运动,可应用于精密超精密机械加工、微机电系统、微操作机器人、大规模集成电路制造、生物技术领域。
权利要求书1页 说明书2页 附图2页CN 110912447 A 2020.03.24C N 110912447A权 利 要 求 书1/1页CN 110912447 A1.一种基于爬行原理的压电旋转驱动平台,包括两组压电驱动单元、弹簧垫片、转子、预紧螺母、螺钉轴、螺钉和底座,压电驱动单元包括预紧楔块、压电叠堆、薄壁式柔性铰链机构,其特征在于:所述平台利用寄生惯性原理采用两组驱动单元交替驱动实现旋转运动的精密驱动。
压电叠堆斜置在薄壁式柔性铰链机构内,在电压控制下压电叠堆伸长,驱动柔性铰链机构做寄生惯性运动,同时提供了薄壁式柔性铰链机构与转子间的预紧力和转子旋转的驱动力。
该平台通过对两组压电驱动单元时序控制,交替提供驱动电压,当只有一组压电驱动单元工作时,这组中的压电叠堆通电,压电叠堆缓慢伸长,通过驱动这组中的柔性铰链机构做寄生惯性运动推动转子旋转;当这组压电叠堆将要失电时,另一组压电驱动单元中的压电叠堆得电缓慢伸长,通过驱动另一组中的柔性铰链机构做寄生惯性运动推动转子继续旋转。
【CN109864819A】一种获取机器人机械手运动学模型的方法【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910117212.0(22)申请日 2019.02.15(71)申请人 沈阳智能机器人国家研究院有限公司地址 110000 辽宁省沈阳市沈河区文萃路69号佳合科技宾馆(72)发明人 江洪伟 (74)专利代理机构 哈尔滨市伟晨专利代理事务所(普通合伙) 23209代理人 李晓敏(51)Int.Cl.A61B 34/10(2016.01)A61B 34/00(2016.01)(54)发明名称一种获取机器人机械手运动学模型的方法(57)摘要一种获取机器人机械手运动学模型的方法属于机器人机械手控制领域;如何实现机器人机械手的运动学模型;包括获取具有五个自由度的机器人机械手;利用Denavit -Hartenberg变换方法,建立每个链节的坐标系相对于前一个链节的坐标系的位置的均匀变换矩阵,将操纵器抓持器的坐标从与最后一个链接相关联的参考系统连续地转换作为基本参考系统;制定机器人操纵器的链接的参数值表;确定机器人操纵器的任何第i个链接相对于任何第j个坐标系的坐标系的位置;使用带有RoboticToolbox软件包的Matlab软件环境计算连接杆位置和方向;将Matlab软件结果模型可视化并与真实对象互连,产生的运动学模型用于机器人操纵器的控制算法的构造,能够调试和校准机器人机械手,实现机器人机械手的运动学模型。
权利要求书1页 说明书3页 附图1页CN 109864819 A 2019.06.11C N 109864819A权 利 要 求 书1/1页CN 109864819 A1.一种获取机器人机械手运动学模型的方法,其特征在于,包括以下步骤:步骤a、获取具有五个自由度的机器人机械手,并且包括六个与杠杆旋转对相关的连杆;步骤b、利用Denavit-Hartenberg变换方法,建立每个链节的坐标系相对于前一个链节的坐标系的位置的均匀变换矩阵,将操纵器抓持器的坐标从与最后一个链接相关联的参考系统连续地转换作为基本参考系统;步骤c、制定机器人操纵器的链接的参数值表;步骤d、通过步骤b和步骤c,确定机器人操纵器的任何第i个链接相对于任何第j个坐标系的坐标系的位置;步骤e、通过使用带有Robotic Toolbox软件包的Matlab软件环境计算连接杆位置和方向;步骤f、将Matlab软件结果模型可视化并与真实对象互连,产生的运动学模型用于机器人操纵器的控制算法的构造,能够调试和校准机器人机械手。
一种仿生三维模型的驱动方法和系统[发明专利]
专利名称:一种仿生三维模型的驱动方法和系统专利类型:发明专利
发明人:宋卫,黄元忠,卢庆华
申请号:CN202010762942.9
申请日:20200731
公开号:CN111968205A
公开日:
20201120
专利内容由知识产权出版社提供
摘要:本申请涉及一种仿生三维模型的驱动方法和系统。
所述方法包括:根据交互指令确定仿生三维模型的运动数据;将所述运动数据分解为驱动所述仿生三维模型相应骨骼关节点的位移向量和旋转向量;基于所述位移向量和旋转向量,利用仿生三维模型的三维骨架带动所述仿生三维模型各部位运动;其中,所述仿生三维模型为利用三维骨架绑定的仿生三维模型。
本申请提供的技术方案,在拥有较高逼真度的情况下,简化了计算过程,可以促进三维模型动画在人机交互领域得到更广泛的应用。
申请人:深圳市木愚科技有限公司
地址:518052 广东省深圳市南山区南头街道马家龙社区大新路198号创新大厦B栋1101
国籍:CN
代理机构:北京华夏正合知识产权代理事务所(普通合伙)
代理人:韩登营
更多信息请下载全文后查看。
【CN109841197A】一种液晶显示装置及其扫描驱动方法【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910169813.6(22)申请日 2019.03.07(71)申请人 南京中电熊猫液晶显示科技有限公司地址 210033 江苏省南京市栖霞区南京液晶谷天佑路7号申请人 南京中电熊猫平板显示科技有限公司 南京华东电子信息科技股份有限公司(72)发明人 岳振博 盛何君 (51)Int.Cl.G09G 3/36(2006.01)G02F 1/1362(2006.01)(54)发明名称一种液晶显示装置及其扫描驱动方法(57)摘要本发明提出一种液晶显示装置及其扫描驱动方法,涉及液晶面板领域,这种液晶显示装置包括:扫描驱动电路,用于通过多条扫描线施加多个扫描信号到每行像素单元;数据驱动电路,用于通过多条数据线施加多个灰阶电压信号到每列像素单元;当数据驱动电路采用列反转的驱动方式驱动液晶显示面板的每列像素单元时,扫描信号以N (N为偶数,且N大于等于4)帧为一个周期进行极性列反转驱动扫描,其中,前N/2帧扫描方向为从上往下,后N/2帧扫描方向为从下往上,或者前N/2帧扫描方向为从下往上,后N/2帧扫描方向为从上往下。
这样在使用传统列反转驱动的方式下,使得电容耦合互相抵消,并消除纵向串扰的现象。
权利要求书2页 说明书5页 附图5页CN 109841197 A 2019.06.04C N 109841197A权 利 要 求 书1/2页CN 109841197 A1.一种液晶显示装置,包括:液晶显示面板,其包括多条数据线以及与数据线相交的多条扫描线;该多条数据线和多条扫描线定义出多个像素单元,该多个像素单元构成像素矩阵;扫描驱动电路,用于通过多条扫描线施加多个扫描信号到每行像素单元;数据驱动电路,用于通过多条数据线施加多个灰阶电压信号到每列像素单元;其特征在于,当所述数据驱动电路采用列反转的驱动方式驱动液晶显示面板的每列像素单元时,所述扫描信号以N(N为偶数,且N大于等于4)帧为一个周期进行极性列反转驱动扫描,其中,前N/2帧扫描方向为从上往下,后N/2帧扫描方向为从下往上,或者前N/2帧扫描方向为从下往上,后N/2帧扫描方向为从上往下。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910117971.7
(22)申请日 2019.02.15
(71)申请人 湖南高至科技有限公司
地址 410000 湖南省长沙市长沙高新开发
区岳麓西大道588号芯城科技园6栋8
楼
申请人 中国人民解放军战略支援部队航天
工程大学
(72)发明人 宋旭民 柴华 刘天华 白珍
陈维高 王伟林
(74)专利代理机构 长沙朕扬知识产权代理事务
所(普通合伙) 43213
代理人 马家骏
(51)Int.Cl.
G06F 17/50(2006.01)
(54)发明名称
一种仿真模型驱动方法
(57)摘要
本发明公开了一种仿真模型驱动方法,包括
以下步骤:根据连线类型确定仿真模型之间的层
级关系并且基于单纯形法计算每个仿真模型的
层次,所述仿真模型为IOCE多级组合模型;从最
高层级向最底层级逐一发布广播驱动命令;判断
当前广播驱动命令的层次与所述仿真模型层次
是否相同,若相同则驱动该层仿真模型,否则,不
驱动该层仿真模型。
本发明确定多级仿真模型各
层级之间的关系,将各级仿真模型之间的时序关
系转换为模型的层级关系,实现驱动时序的记录
与调度。
权利要求书1页 说明书3页 附图3页CN 109815617 A 2019.05.28
C N 109815617
A
权 利 要 求 书1/1页CN 109815617 A
1.一种仿真模型驱动方法,其特征在于,包括以下步骤:
根据连线类型确定仿真模型之间的层级关系并且基于单纯形法计算每个仿真模型的层级,所述仿真模型为IOCE多级组合模型;
从最高层级向最底层级逐一发布广播驱动命令;
判断当前广播驱动命令的层级与所述仿真模型层级是否相同,若相同则驱动该层仿真模型,否则,不驱动该层仿真模型。
2.根据权利要求1所述的一种仿真模型驱动方法,其特征在于,所述连线类型包括并行连线与串行连线,相同层级的仿真模型之间的时序关系为通过并行连线的方式进行驱动,不同层级仿真模型之间的时序关系通过串行连线的方式进行驱动。
3.根据权利要求2所述的一种仿真模型驱动方法,其特征在于,所述串行连线的驱动优先级大于所述并行连线的驱动优先级。
4.根据权利要求1所述的一种仿真模型驱动方法,其特征在于,所述单纯形法为对偶单纯形法。
5.根据权利要求1所述的一种仿真模型驱动方法,其特征在于,计算每个仿真模型的层级包括以下步骤:
根据仿真模型之间的连线关系,通过单纯型算法,建立仿真模型的时序矩阵;
采用时序线性不等式法将仿真模型的时序矩阵转换为仿真模型的层级关系。
6.根据权利要求1所述的一种仿真模型驱动方法,其特征在于,当时序线性不等式无解时,表示所述IOCE多级组合模型内部存在驱动冲突现象,对发生驱动冲突的仿真模型修改交互关系。
2。