四位数码管显示的数字钟设计与实现
Arduino驱动MAX7219四位数码管显示时间
Arduino驱动MAX7219四位数码管显示时间Arduino驱动MAX7219四位数码管显示时间默认使用Pin 2为MOSI(数据发送)引脚,Pin 3为CS(片选)引脚,Pin 4为SCLK(时钟)引脚,如有需要请修改代码前三行的define。
#define MO 2#define CS 3#define CLK 4static int time_h = 21, time_m =25, time_s = 30; //此刻时间:时,分,秒int alarm_clock_h = 8, alarm_clock_m = 00; //闹钟时间unsigned long time = 0;unsigned char buffer_led[5] = { 0x00,};//缓存void SPI_init(void) //初始化SPI引脚{pinMode(CLK, OUTPUT);pinMode(MO, OUTPUT);pinMode(CS, OUTPUT);digitalWrite(CS, HIGH);digitalWrite(CLK, LOW);digitalWrite(MO, HIGH);}void SPI_send(unsigned char reg, unsigned char data) //spi 单向16位数据发送{int x;/*Serial.print("reg = ");Serial.print(reg, HEX);Serial.print(" data = ");Serial.println(data, HEX);*/digitalWrite(CS, LOW);for (x = 0; x < 8; x++){digitalWrite(MO, 0x80 & (reg << x)); //高位在前digitalWrite(CLK, HIGH);digitalWrite(CLK, LOW);}for (x = 0; x < 8; x++){digitalWrite(MO, 0x80 & (data << x)); //高位在前digitalWrite(CLK, HIGH);digitalWrite(CLK, LOW);}digitalWrite(CS, HIGH);}void lcd_init(void)//初始化Max7219配置{SPI_send(0x0b, 0x07); //scan-limitSPI_send(0x09, 0xff); //decode mode allSPI_send(0x0c, 0x01); //shutdown offSPI_send(0x0f, 0x00); //off display testSPI_send(0x0a, 0x04); //intensitydelay(100);}void clear(void)//清除显示{for (int i = 1; i <= 8; i++){SPI_send(i, 0x0F);}}void led_display(void)//显示时间{char cache = 0x00;if ((time_h / 10) == 0)buffer_led[0] = 0x00;else buffer_led[0] = time_h / 10;buffer_led[1] = time_h % 10 | 0x01;buffer_led[2] = time_m / 10;buffer_led[3] = time_m % 10;SPI_send(8, buffer_led[0]);SPI_send(7, buffer_led[1]);SPI_send(6, 0x0a);SPI_send(5, buffer_led[2]);SPI_send(4, buffer_led[3]);SPI_send(3, 0x0a);SPI_send(2, time_s / 10);SPI_send(1, time_s % 10);}void get_time()//获取时间并更新显示{static char ss = 1;static unsigned long time_cc = 0;if ((millis() - time_cc) > 1000 | millis() < 150)//秒{if (millis() <= 200) //若系统计时器溢出时时间,time_cc重计{time_cc = millis();time_s ++;delay(150);}else if (millis() > 200)//秒{time_s += (millis() - time_cc) / 1000;// time_cc = millis()-990; //时间快进time_cc = millis();buffer_led[4] = (0x01 & ss) << 5;ss = ~ss;}if (time_s > 59) //分{if (time_s - 60 > 1)//如果有延时间隔导致秒钟大于60秒,进行分钟缺失补偿 {time_m += time_s / 60;if (time_s % 60 == 0)time_m--;time_s = time_s - (time_s / 60) * 60;}else time_s = 0;time_m++;buffer_led[4] = 0x80;if (time_m > 59)//时{time_h++;time_m = (time_m - 60);buffer_led[4] = 0xf0;}if (time_h > 23){time_h = 0;time_s += 5; //时间误差补偿}}// Serial.print("millis="); // Serial.print(time_cc);// Serial.print(" time="); // Serial.print(time_h);// Serial.print(":");// Serial.print(time_m);// Serial.print(":");// Serial.println(time_s); led_display();//刷新数码管显示}}void setup(){Serial.begin(9600);SPI_init();lcd_init();clear();}void loop(){get_time();}。
单片机4位数码管电子时钟

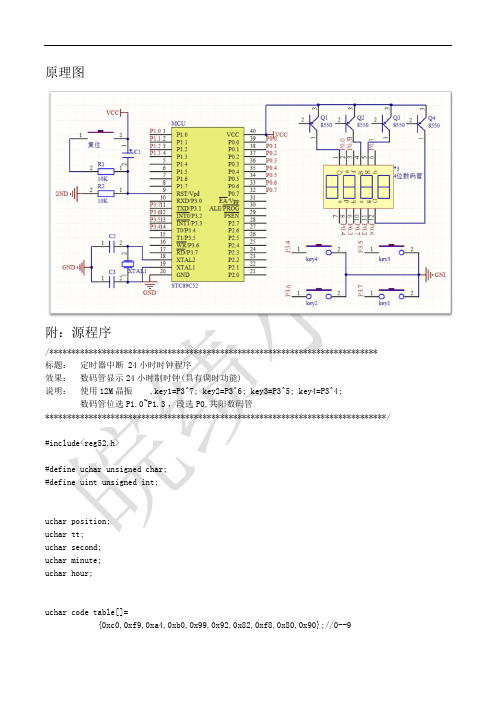
单片机4位数码管电子时钟经过几天的努力,第一个51 单片机电子时钟终于出炉了,通过4 位数码管来显示时间,系统晶振11.0592MHZ,仿真图中用二极管代替时钟冒号闪烁,非门代替三极管,让仿真速度与真实速度达到一致,本设计用了6 个按钮来对时间及闹钟时间的调节、关闭,p3.2 接时间分加1 按钮,p3.3 接时间时加1 按钮,p3.4 接闹钟时间与当前时间切换按钮,按住不放显示闹钟的时间,闹钟初始化为00:00,放开按钮则显示当前时间,p3.5 接闹钟加1 按钮,p3.6 接闹钟时加1 按钮,p3.7 接关闭闹钟按钮有没有人会问1hei 本程序已经通过软件仿真和硬件制作.程序源代码:org 0000h ajmp main ;调至主程序org 000bh ;T0 中断入口地址ljmp inti0 org 001bh ;T1 中断入口地址ljmp inti1 org 0030hmain:mov tmod,#11h ;设T0、T1 为模式1 mov ie,#8ah ;开T0、T1 中断允许mov th0,#4ch ;赋T0 50ms初值mov tl0,#00h mov th1,#4ch ;赋T1 50ms 初值mov tl1,#00h mov sp,#60h ;设置堆栈指针mov r0,#20 ; T0 50ms 计数20 次mov 31h,#00 ;时间秒初始化mov32h,#00 ;时间分初始化mov 33h,#00 ;时间时初始化mov 38h,#00 ;闹钟分初始化mov 39h,#00 ;闹钟时初始化setb tr0 ;启动T0 setb tr1 ;启动T1loop:lcall display ;调用时间显示子程序lcall key ;调用时间调节按键子程序lcall keynz ;调用闹钟按键子程序ajmp loopinti0:push psw ;保护现场push acc clr ea ;关中断movth0,#4ch ;重赋50ms 初值mov tl0,#00h djnz r0,out ;对50ms 计数判断mov r0,#20 ;重赋50ms 计数值inc 31h ;秒加1 cpl p2.2 ;P2.2 取反输出mov a,31h cjne a,#60,out ;判秒是否加到60,没有加到中断返回mov 31h,#00 ;秒加到60,对秒清零inc 32h ;分加1 mov a,32h cjne a,#60,out ;判分是否加到60,没有加到就中断返回mov32h,#00 ;分加到60,对分清零inc 33h ;时加1 mov a,33h cjne a,#24,out ;判时是。
基于51单片机的4位数码管电子钟
原理图附:源程序/***************************************************************************标题:定时器中断 24小时时钟程序效果:数码管显示24小时制时钟(具有调时功能)说明:使用12M晶振,key1=P3^7; key2=P3^6; key3=P3^5; key4=P3^4;数码管位选P1.0~P1.3 ,段选P0,共阳数码管******************************************************************************/ #include<reg52.h>#define uchar unsigned char;#define uint unsigned int;uchar position;uchar tt;uchar second;uchar minute;uchar hour;uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//0--9sbit smg_q = P1^0; //数码管千位引脚sbit smg_b = P1^1;sbit smg_s = P1^2;sbit smg_g = P1^3;sbit key1=P3^7; //按键定义sbit key2=P3^6;sbit key3=P3^5;sbit key4=P3^4;void keyscan(); //函数声明void display(unsigned char hour,unsigned char minute);void delay(unsigned int timer);void init();/***********************************************************主函数***********************************************************/ void main(){init();while(1){if(tt==20){tt=0;second++;if(second==60){second=0;minute++;if(minute==60){minute=0;hour++;if(hour==24)hour=0;}}}keyscan();display(hour,minute);delay(1);}}/***********************************************************调时***********************************************************/ void keyscan(){if(key1==0) //小时加1{TR0=0;hour++;if(hour==24)hour=0;delay(200) ;TR0=1;}if(key2==0) // 小时减{TR0=0;hour--;if(hour<0)hour=23;delay(200) ;TR0=1;}if(key3==0) // 分钟加{TR0=0;minute++;if(minute==60)minute=0;delay(200) ;TR0=1;}if(key4==0) // 分钟减{TR0=0;minute--;if(minute<0)minute=59;delay(200) ;TR0=1;}}/***********************************************************初始化***********************************************************/ void init(){tt=0;position=0;second=0;minute=0;hour=0;smg_q=1;smg_b=1;smg_s=1;smg_g=1;key1=1;key2=1;TMOD=0X01;TH0=(65536-50000)/256;TL0=(65536-50000)%256;EA=1;ET0=1;TR0=1;}/***********************************************************定时器TO中断***********************************************************/ void t0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256;tt++;}/***********************************************************显示***********************************************************/void display(unsigned char hour,unsigned char minute){P0=0XFF;switch(position){case 0:smg_g=1;smg_q=0;P0=table[hour/10];break;case 1:smg_q=1;smg_b=0;P0=table[hour%10];if(tt>=10)P0&=0x7f; //小数点以半秒的时间闪烁break;case 2:smg_b=1;smg_s=0;P0=table[minute/10];break;case 3:smg_s=1;smg_g=0;P0=table[minute%10];break;}position++;if(position>3)position=0;}/***********************************************************延时***********************************************************/ void delay(unsigned int time){unsigned int x,y;for(x=time;x>0;x--)for(y=110;y>0;y--);}。
4位简易秒表的设计与制作
4位秒表的设计与制作一、任务要求该任务要求设计并制作一个4位秒表,秒表有启动、停止和清零功能,显示时间为0到9999秒。
该任务是综合应用数码管动态显示、单片机定时计数器和中断系统设计一个具有启动、停止、清零和校时功能的,能显示0到9999秒的4位秒表。
二、设计方案提示4位秒表的设计与1位秒表设计基本相似,所不同的是4位秒表要显示4位数据,而且要有校时功能,所以它只是综合了键盘、定时器、中断系统和动态显示的应用。
多位数显示器是用数码管显示4位十进制数,如果采用数码管静态显示方法,4个数码管要占用4个I/O端口,将占用单片机的所有I/O口而无法实现其他功能,因此不能用静态显示方法实现多位数据的显示。
如何用单片机控制数码管实现多位数据的现实,而又不占用太多的I/O口呢?这就要用到--------数码管的动态显示。
4位秒表设计与1位秒表的设计在原理上是一样的,不同的是:4位秒表要显示4位数,利用前面的数码管显示方法需要4个并行I/0口,而启动停止和清零要占用2个I/O线,89C52单片机只有4个并行I/O口,因此这种显示方法不能满足4位秒表的功能。
那么,如何实现4位秒表的设计呢?这就是该任务的关键------数码管动态显示技术三、系统硬件设计参考:4位秒表电路原理图如图3-21所示,有启动停止、清零和校时电路;数码管的位选端分别接P2口的P2.0~P2.3,段选端接P0口,74LS245是驱动电路。
图3-21 4位秒表电路原理图硬件电路设计图3-17 4位数据显示器的硬件原理图图3-17是4位数据显示器的硬件原理图,数码管是共阳连接,P2口输出显示段码,74LS245驱动数码管显示,CE是片选端,低电平有效;4位数码管的公共端分别由P3.0、P3.1、P3.2、P3.3控制。
四、系统软件设计参考程序//功能:4位数码管动态显示“1234”//函数名:delay50ms//函数功能:采用定时器1、工作方式1实现50ms延时,晶振频率12MHz//形式参数:无//返回值:无void delay50ms(){ TH1=0x3c; // 置定时器初值TL1=0xb0;TR1=1; // 启动定时器1while(!TF1); // 查询计数是否溢出,即定时到,TF1=1TF1=0; // 50ms定时时间到,将定时器溢出标志位TF1清零}void main() //主函数{unsigned char led[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92}; //设置数字0~5字型码unsigned char i,w;TMOD=0x10; //设置定时器1工作方式1while(1) {w=0x01; //位选码初值为01Hfor(i=0;i<4;i++){P2=~w; //位选码取反后送位控制口P2口w<<=1; //位选码左移一位,选中下一位LEDP1=led[i]; //显示字型码送P1口delay50ms(); //延时50ms}}}4位秒表流程图如图3-22所示:包括主函数流程、定时器中断函数和显示函数流程图。
四位时钟设计方案
目录一.前言二.设计任务1.设计题目:4位数字时钟设计2.技术指标及设计要求3.给定条件及器件三.设计方案与实现1.硬件设计2.相关器件介绍3.数码管介绍4.数码管的驱动方式5.电路设计电路原理图如下,采用AT89C2051单片机制作,使用3~6V直流电源。
S1为复位按键,S2调时,S3调分;注意:1安装前检查元件,2元件安装极性和引脚方向。
此外J1 和J2是两根“飞线”,请先用电阻剪角焊接,然后焊接数码管。
四、总结五、附录元件清单六、参考文献一、前言当前,电子技术已经广泛应用于社会生活中,电子技术俨然成为了我们日常生活的必备技术,无论计算机、电视机、洗衣机还是手机、MP3播放器都不能缺少电子技术的支持。
电子技术综合课程设计是集电路分析、模拟电子技术、数字电子技术以及电路实验、模拟电子技术实验、数字电子技术实验等课程之后的一门理论与实践相结合的综合设计性课程。
作为电子信息领域的一员,无疑电子技术对我们的专业课学习至关重要,通过对《数字电子技术基础》、《模拟电子技术基础》等课程的学习,经过不懈的探讨努力,最终完成设计任务制作。
本次课程设计我们将设计一个四位数字时钟。
本系统采用以A T89C2051为主控芯片,实现电子时钟的设计并考虑节约系统的硬件,而且达到时钟功能为24小时的设计方式,显示时、分;具有快速校准时、分的功能,实现时间的调整,然后输出四位的显示器显示出来。
二、设计任务1、题目:4位数字时钟的设计2、技术指标及设计要求(1)显示小时、分钟时间(2)实现秒的量化显示(3)具有调整时间功能(4)手动复位显示功能3、综合条件及器件(1)单片机及相关外围器件(2)直流稳压电源4V(3)万用电路板(4)4联共阳数码管4、器件介绍1)数码管介绍数码管按段数分为七段数码管和八段数码管,八段数码管比七段数码管多一个发光二极管单元(多一个小数点显示);按能显示多少个“8”可分为1位、2位、4位等等数码管;按发光二极管单元连接方式分为共阳极数码管和共阴极数码管。
四位电子钟电路和汇编源程序
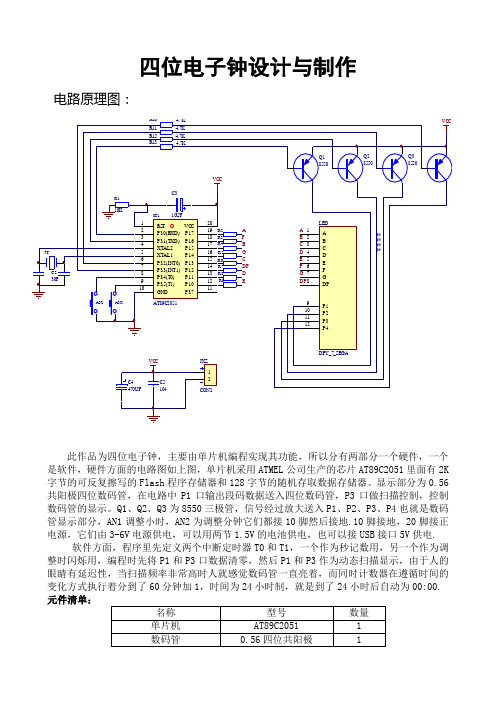
RS T1P3.0(R XD)2P3.1(TXD)3XTAL24XTAL15P3.2(INT0)6P3.3(INT1)7P3.4(T0)8P3.5(T1)9GND 10P3.711P1.012P1.113P1.214P1.315P1.416P1.517P1.618P1.719VC C 20IC1AT89C 2051JTC130P C230PR110KVC CAN 2AN 1R2R3R4R5R6R7R8R9A 1B 2C 3D 4E 5F 6G 7DP8P19P210P311P4128.8.8.8.LEDDPY_7_SEGAVC CR10 4.7K R13 4.7KR11 4.7K R12 4.7K Q18550Q28550Q38550Q4855012JXZ CON2C5104C4470UF VC CC310UFA FB GC DPDE A B C D EFG DP 四位电子钟设计与制作电路原理图:此作品为四位电子钟,主要由单片机编程实现其功能,所以分有两部分一个硬件,一个是软件,硬件方面的电路图如上图,单片机采用ATMEL 公司生产的芯片AT89C2051里面有2K 字节的可反复擦写的Flash 程序存储器和128字节的随机存取数据存储器。
显示部分为0.56共阳极四位数码管,在电路中P1口输出段码数据送入四位数码管,P3口做扫描控制,控制数码管的显示。
Q1、Q2、Q3为8550三极管,信号经过放大送入P1、P2、P3、P4也就是数码管显示部分,AN1调整小时,AN2为调整分钟它们都接10脚然后接地.10脚接地,20脚接正电源,它们由3-6V 电源供电,可以用两节1.5V 的电池供电,也可以接USB 接口5V 供电.软件方面,程序里先定义两个中断定时器T0和T1,一个作为秒记数用,另一个作为调整时闪烁用,编程时先将P1和P3口数据清零,然后P1和P3作为动态扫描显示,由于人的眼睛有延迟性,当扫描频率非常高时人就感觉数码管一直亮着,而同时计数器在遵循时间的变化方式执行着分到了60分钟加1,时间为24小时制,就是到了24小时后自动为00:00. 元件清单:名称 型号 数量 单片机 AT89C2051 1 数码管 0.56四位共阳极 1三极管8550 4电阻4.7K 4 10K 1 220 8电容30PF 2 10uf 1 104 1石英晶体振荡器12M 1 电子钟源程序(汇编):MIAO BIT P2.0 ;秒点位HOU_S BIT P3.0 ;时十位HOU_G BIT P3.1 ;时个位MIN_S BIT P3.2 ;分十位MIN_G BIT P3.3 ;分个位H_KEY BIT P3.4 ;时调整键M_KEY BIT P3.5 ;分调整键SHAN BIT 0 ;秒点闪烁LEDBUS EQU P1 ;显示数据总线SECOND EQU 30H ;秒寄存器MINUTE EQU 31H ;分寄存器HOUR EQU 32H ;时寄存器TIM_1 EQU 33H ;定时器0中断次数TIM_2 EQU 34H ;定时器0中断次数;********************************ORG 0000H ;程序开始LJMP INITORG 000BH ;定时器0中断入口地址LJMP TIMER0ORG 0030H ;程序从30H开始;********************************; 单片机初始化INIT:MOV SECOND, #0 ;秒置0MOV MINUTE, #0 ;分置0MOV HOUR, #0 ;开机后显示0点MOV TIM_1, #10 ;中断10次为0.5秒MOV TIM_2, #2 ;0.5*2=1秒MOV SP, #60H ;堆栈指针指向60HMOV TMOD, #01H ;定时器0为模式1(16位)MOV TH0, #03CHMOV TL0, #0B0H ;50毫秒初值(晶振12M)SETB ET0 ;定时器0中断允许SETB TR0 ;启动定时器0SETB EA ;开总中断;********************************; 主程序MAIN:JNB H_KEY, HT ;时调整键按下转到HTJNB M_KEY, MT ;分调整键按下转到MTACALL DISP ;调用显示子程序AJMP MAIN ;转LOOP继续检测按键状态;********************************; 时间调整;----- 分调整 -----------------MT: ACALL DISP ;调用显示子程序JNB M_KEY, MT ;判断按键是否松开INC MINUTE ;分加一MOV A, MINUTECJNE A,#60, MAIN ;判断分是否加到60MOV MINUTE, #0 ;分到60变为0MOV SECOND, #0 ;秒置0AJMP MAIN;----- 时调整 -----------------HT: ACALL DISP ;调用显示子程序JNB H_KEY, HT ;判断按键是否松开INC HOUR ;时加1MOV A, HOURCJNE A,#24, MAINMOV HOUR, #0 ;判断时是否到24,时到24变0 AJMP MAIN;********************************; 显示子程序DISP:MOV DPTR, #LEDTAB ;数码管段码表首地址送DPTR MOV A, MINUTE ;分放入ACCMOV B, #10 ;B放入10DIV AB ;A/B,商在A余数在BMOVC A, @A+DPTR ;查表取分十位段码MOV LEDBUS, A ;段码送LEDBUS口显示MOV C, SHANMOV MIAO, C ;秒点闪烁CLR MIN_S ;打开分十位显示ACALL D1MS ;延时1毫秒SETB MIN_S ;关闭分十位显示MOV A, BMOVC A, @A+DPTR ;查表取分个位段码MOV LEDBUS, AMOV C, SHANMOV MIAO, C ;秒点闪烁CLR MIN_G ;打开分个位显示ACALL D1MS ;延时1毫秒SETB MIN_G ;关闭分十位显示MOV A, HOURMOV B, #10DIV AB ;拆分小时的十位和个位JZ DISP0 ;十位为0不显示十位MOVC A, @A+DPTRMOV LEDBUS, ACLR HOU_S ;打开时十位显示DISP0:ACALL D1MSSETB HOU_S ;关闭时十位显示MOV A, BMOVC A, @A+DPTRMOV LEDBUS, ACLR HOU_G ;打开时个位显示ACALL D1MSSETB HOU_G ;关闭时个位显示RET;********************************; 定时器0中断服务程序TIMER0:MOV A, #0B1H ;定时器0中断服务子程序ADD A, TL0 ;同步修正(参考本人的<如何是自制的单片机电子钟走时精准>)MOV TL0, AMOV TH0, #03CH ;重装定时器0初值PUSH ACC ;入栈保护ACC和PSWPUSH PSWDJNZ TIM_1, RETI_1MOV TIM_1, #10 ;中断10次为0.5秒CPL SHAN ;取反闪烁位DJNZ TIM_2, RETI_1MOV TIM_2, #2 ;1秒时间到INC SECOND ;秒加1MOV A, SECONDCJNE A,#60, RETI_1MOV SECOND, #0 ;秒到60变0INC MINUTE ;分加1MOV A, MINUTECJNE A,#60, RETI_1MOV MINUTE, #0 ;分到60变0INC HOUR ;时加1MOV A, HOURCJNE A,#24, RETI_1MOV HOUR, #0 ;时到24变0RETI_1: POP PSW ;出栈POP ACCRETI;********************************; 延时子程序D1MS: MOV R7, #2 ;延时1毫秒子程序D_1: MOV R6, #250 ;延时时间估算250*2*2=1000微秒=1毫秒DJNZ R6, $DJNZ R7, D_1RET;********************************; 数码管段码表LEDTAB:DB 14H,0D7H,4CH,45H,87H; 0 1 2 3 4DB 25H,024H,57H,04H,05H; 5 6 7 8 9END。
51单片机中4个数码管的显示实验

51单片机中4个数码管的显示实验一、实验目的:1、看懂电路原理图,明白4个共阳数码管的编程方式。
2、看懂参考程序,学会使用扫描法来对4个数码管进行扫描显示。
学会使用定时器。
二、实验设备:51通用实验板一个,51仿真器一个,40针仿真头一个,12V电源一个,串口线一条。
三、实验电路原理图:四、实验内容:4个数码管一次显示4个数字,下一次加4进行显示,数字最大为9,到9再从0重新进行显示。
中间有一定的时间延时。
改变数据用定时器进行设置。
五、实验步骤:安实物图的形式把实验设备连接在一起。
六、参考程序:;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;4个数码管的显示实验;使用70H,71H,72H,73H进行数码管显示数据存储。
75H进行定时器定时时间设置,发光二极管L1进行亮灭显示改变数据标志。
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;SETTIM EQU 75H;定时时间长短设定ORG 0000HLJMP MAINORG 000BHLJMP TIM0;定时器0中断ORG 0030HMAIN: ;主程序MOV SP,#07HMOV SETTIM ,#00HLCALL INIT;初始化数据MOV TMOD,#01H;设值定时器0MOV TH0,#00H;定时初值MOV TL0,#00HSETB EA;开总中断SETB ET0;开中断SETB TR0;开始定时器STAR:LCALL DISPLJMP STAR;****************************************;显示子程序DISP: MOV R0,#0FEHMOV R1,#70HDISP1:MOV A,R0MOV P2,AMOV A,@R1MOV DPTR,#TABMOVC A,@A+DPTRMOV P0,ALCALL DLYSINC R1MOV A,R0RL AMOV R0,AJB ACC.4,DISP1RET;***************************************;定时器0中断程序TIM0:CLR TR0CLR EAMOV A,SETTIMINC ACJNE A,#9,TM1LCALL CHGMOV A,#00HCPL P1.0;定时器运行标志,使L1灯不断闪动TM1: MOV SETTIM,AMOV TH0,#00HMOV TL0,#00HSETB EASETB TR0RETI;****************************改变要显示的值CHG:MOV R0,#70HMOV R3,#04HCH1:MOV A,@R0INC ACJNE A,#0AH,CH2MOV A,#00HCH2:MOV @R0,AINC R0DJNZ R3,CH1RET;********************************************;初始化程序INIT: ;初始化70H---73H中的数据,使用R0,R1,R3MOV R0,#00H;数据初值MOV R3,#04HMOV R1,#70H;4个数码管数据存储地址IN0:MOV A,R0MOV @R1,AINC R0INC R1DJNZ R3,IN0RET;*****************************************;延时程序DLYS: MOV R6,#5DLYS0:MOV R5,#150DJNZ R5,$DJNZ R6,DLYS0RET;*****************************************;数据表TAB:DB 0C0H,0F9H,0A4H,0B0H; 0,1,2,3DB 99H,92H,82H,0F8H;?,5,6,7DB 80H,90H,88H,83H;?,9,A,BDB 0C6H,0A1H,86H,8EH;C,D,E,FDB 8CH,89H,07fh,0bFH;P,H,.,-11001011END七、思考:修改一下程序,使用定时器2进行定时改变数据进显示。
单片机 4位时钟数码管

单片机控制4位时钟数码管的方法如下:
连接硬件:将4位数码管的共阳(或共阴)引脚连接到单片机的I/O口,连接数码管的段选引脚到单片机的另外4个I/O口。
同时,连接一个晶振和相关的电容电阻到单片机的时钟输入引脚和地。
设置引脚:在代码中定义每个数码管引脚对应的I/O口为输出模式,用于控制数码管的显示。
编写代码:使用单片机的定时器功能,通过编程计算出每个数码管显示的数字对应的段选编码,并在定时器中断服务程序中更新数码管的显示。
调试程序:将程序下载到单片机中,通过观察数码管的显示效果,调整程序中的参数或代码,以达到预期的显示效果。
需要注意的是,具体的实现方式可能因单片机的型号和数码管的类型而有所不同,需要根据实际情况进行相应的调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四位数码管显示的数字钟设计与实现
数字钟实际上是一个对标准频率(1HZ)进行计数的计数电路。
由于计数的起始时间不可能与标准时间(如北京时间)一致,故需要在电路上加一个校时电路,同时标准的1HZ时间信号必须做到准确稳定。
数字钟实际上是一个对标准频率(1HZ)进行计数的计数电路。
由于计数的起始时间不可能与标准时间(如北京时间)一致,故需要在电路上加一个校时电路,同时标准的1HZ 时间信号必须做到准确稳定。
通常使用石英晶体振荡器电路构成数字钟。
数字钟的工作原理
晶体振荡器电路晶体振荡器是构成数字式时钟的核心,它保证了时钟的走时准确及稳定。
图3-2所示电路通过cmos非门构成的输出为方波的数字式晶体振荡电路,这个电路中,cmos非门u1与晶体、电容和电阻构成晶体振荡器电路,u2实现整形功能,将振荡器输出的近似于正弦波的波形转换为较理想的方波。
输出反馈电阻R1为非门提供偏置,使电路工作于放大区域,即非门的功能近似于一个高增益的反相放大器。
电容c1、c2与晶体构成一个谐振型网络,完成对振荡频率的控制功能,同时提供了一个180度相移,从而和非门构成一个正反馈网络,实现了振荡器的功能。
由于晶体具有较高的频率稳定性及准确性,从而保证了输出频率的稳定和准确。
晶体XTAL 的频率选为32768HZ。
该元件专为数字钟电路而设计,其频率较低,有利于减少分频器级数。
从有关手册中,可查得C1、C2均为30pF。
当要求频率准确度和稳定度更高时,还可接入校正电容并采取温度补偿措施。
由于CMOS电路的输入阻抗极高,因此反馈电阻R1可选为10M。
较高的反馈电阻有利于提高振荡频率的稳定性。
非门电路可选74HC00。
#include
#define uchar unsigned char
uchar code shuzi[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xc0};//0 1 2 3 4 5 6 7 8 9 0。