卫星导航课程整理
《卫星导航定位教案》教案-教案

参考资料
《GPS测量原理及应用》第三版,徐绍铨、张华海编,武汉大学出版社,2008
《GPS测量原理及应用》,郑加柱,王永弟,石杏喜,孙小荣等编著,科学出版社,2014
教学后记
系统误差是GPS定位误差的主要部分。
上课日期
2014年9月16日
第5讲
章节
第4章GPS定位中的误差源
2.周跳的探测
3.整周模糊度的确定
4.本讲小结
时间分配
10分钟
35分钟
50分钟
5分钟
主要教学方法与
手段
多媒体+板书+提问
课后作业
1.周跳的探测的常见方法有哪几种?。
2.整周模糊度确定的常见方法有哪几种?
3.确认整周模糊度正确的主要指标有哪几个?
参考资料
《GPS测量原理及应用》第三版,徐绍铨、张华海编,武汉大学出版社,2008
2.写出宽巷、窄巷和无电离层影响的线性组合观测值。
参考资料
《GPS测量原理及应用》第三版,徐绍铨、张华海编,武汉大学出版社,2008
《GPS测量原理及应用》,郑加柱,王永弟,石杏喜,孙小荣等编著,科学出版社,2014
教学后记
线性组合观测值是消除或减弱了某些公共影响或误差的观测值。
上课日期
2014年9月30日
难点及处理方法
同类型不同频率观测测的组合板书推导加深理解
授课方式
讲授
教学内容
1.上讲内容复习
2.单差、双差、三差观测值
3.其他一些常用的线性组合观测值
4.本讲小结
时间分配
15分钟
50分钟
30分钟
5分钟
卫星导航系统-第3讲-卫星导航基础知识-3-1
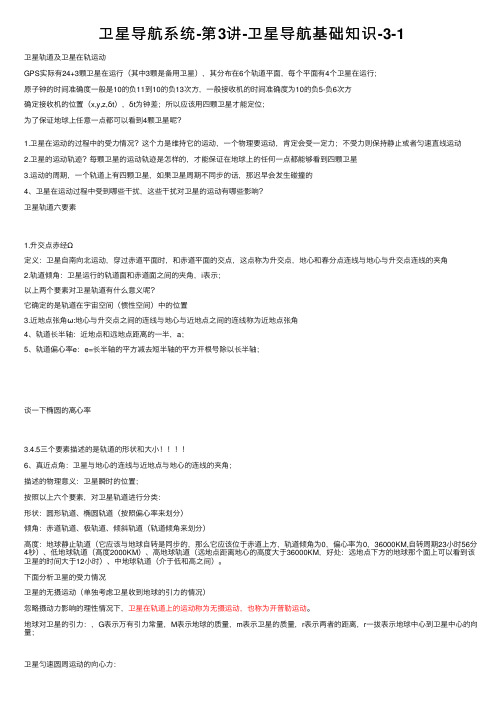
卫星导航系统-第3讲-卫星导航基础知识-3-1卫星轨道及卫星在轨运动GPS实际有24+3颗卫星在运⾏(其中3颗是备⽤卫星),其分布在6个轨道平⾯,每个平⾯有4个卫星在运⾏;原⼦钟的时间准确度⼀般是10的负11到10的负13次⽅,⼀般接收机的时间准确度为10的负5-负6次⽅确定接收机的位置(x,y,z,δt),δt为钟差;所以应该⽤四颗卫星才能定位;为了保证地球上任意⼀点都可以看到4颗卫星呢?1.卫星在运动的过程中的受⼒情况?这个⼒是维持它的运动,⼀个物理要运动,肯定会受⼀定⼒;不受⼒则保持静⽌或者匀速直线运动2.卫星的运动轨迹?每颗卫星的运动轨迹是怎样的,才能保证在地球上的任何⼀点都能够看到四颗卫星3.运动的周期,⼀个轨道上有四颗卫星,如果卫星周期不同步的话,那迟早会发⽣碰撞的4、卫星在运动过程中受到哪些⼲扰,这些⼲扰对卫星的运动有哪些影响?卫星轨道六要素1.升交点⾚经Ω定义:卫星⾃南向北运动,穿过⾚道平⾯时,和⾚道平⾯的交点,这点称为升交点,地⼼和春分点连线与地⼼与升交点连线的夹⾓2.轨道倾⾓:卫星运⾏的轨道⾯和⾚道⾯之间的夹⾓,i表⽰;以上两个要素对卫星轨道有什么意义呢?它确定的是轨道在宇宙空间(惯性空间)中的位置3.近地点张⾓ω:地⼼与升交点之间的连线与地⼼与近地点之间的连线称为近地点张⾓4、轨道长半轴:近地点和远地点距离的⼀半,a;5、轨道偏⼼率e:e=长半轴的平⽅减去短半轴的平⽅开根号除以长半轴;谈⼀下椭圆的离⼼率3.4.5三个要素描述的是轨道的形状和⼤⼩6、真近点⾓:卫星与地⼼的连线与近地点与地⼼的连线的夹⾓;描述的物理意义:卫星瞬时的位置;按照以上六个要素,对卫星轨道进⾏分类:形状:圆形轨道、椭圆轨道(按照偏⼼率来划分)倾⾓:⾚道轨道、极轨道、倾斜轨道(轨道倾⾓来划分)⾼度:地球静⽌轨道(它应该与地球⾃转是同步的,那么它应该位于⾚道上⽅,轨道倾⾓为0,偏⼼率为0,36000KM,⾃转周期23⼩时56分4秒)、低地球轨道(⾼度2000KM)、⾼地球轨道(远地点距离地⼼的⾼度⼤于36000KM,好处:远地点下⽅的地球那个⾯上可以看到该卫星的时间⼤于12⼩时)、中地球轨道(介于低和⾼之间)。
导航课程知识点总结
导航课程知识点总结导航是指确定位置并安全、高效地到达目的地的过程。
在现代社会中,导航已经成为人们日常生活和工作的重要组成部分。
而在军事、航空、航海、汽车、航天等领域,导航更是至关重要。
因此,导航课程的学习对于提高学生的综合素质和应对未来社会需求具有重要意义。
导航课程的知识点主要包括地图阅读、指南针使用、GPS技术、信标系统、导航计算、导航仪器等内容。
以下将对这些知识点进行详细总结。
一、地图阅读地图是一种用于描述地球表面的平面图。
在导航中,地图是一种重要的工具,能够帮助人们确定自己的位置和规划航线。
地图的阅读需要掌握地图符号、比例尺、方向标识、高程图等基本要素。
其中,地图符号是地图上表示地物的图形符号,方便人们快速理解地图上的内容。
比例尺是地图上受限制的距离和实际距离之间的比值,用于计算真实距离。
方向标识是用于确定方向的标识,通常有正北指示方向。
高程图是用于表示地形高低的地图,在山区、丛林等环境中尤为重要。
二、指南针使用指南针是一种用于确定方向的仪器。
在导航中,指南针可以帮助人们确定自己的方向,并根据指南针指向的方向规划航线。
指南针的使用需要了解磁铁特性、北极、磁偏角等基本知识。
磁铁是一种具有磁性的物质,其中,磁性最强的地方被称为磁极,通常被称为磁北极。
磁偏角是指地球磁场对真实北极的偏角,不同地区的磁偏角可能会有所不同。
三、GPS技术全球定位系统(GPS)是一种通过卫星信号确定位置的技术。
在导航中,GPS技术可以帮助人们通过接收卫星信号确定自己的位置和规划航线。
GPS技术的基本原理包括卫星信号发射、接收器接收信号、计算距离和位置等过程。
通过GPS技术可以实现车辆导航、航空导航、航海导航等应用。
四、信标系统信标是一种用于标志位置和指示方向的设备。
在导航中,信标系统可以帮助人们确定自己的位置并规划航线。
信标系统的基本原理包括信标发射信号、接收器接收信号、计算距离和方向等过程。
通过信标系统可以实现航海、航空、水下探测等应用。
《卫星导航概述》课件

05
卫星导航的未来发展
高精度定位技术
总结词
高精度定位技术是卫星导航领域的重要发展方向,通过提高定位精度,能够更好 地满足各种应用需求。
详细描述
随着技术的不断进步,卫星导航系统的高精度定位技术将得到进一步发展。通过 采用更先进的信号处理技术和算法,可以降低误差和提高定位精度,从而更好地 满足各种应用需求,如智能交通、无人机、农业等领域的精细化管理。
多模融合导航技术
总结词
多模融合导航技术是未来卫星导航发展的重要趋势,通过融合不同导航模式,能够提高导航系统的可靠性和可用 性。
详细描述
随着卫星导航技术的发展,多模融合导航技术成为重要趋势。通过融合卫星导航、惯性导航、地面增强等多种导 航模式,可以相互补充和校验,提高导航系统的可靠性和可用性。这种技术将有助于解决复杂环境下的导航问题, 如城市峡谷、高楼林立等区域。
IRNSS的优点包括自主可控、 提高国家安全和战略地位,以 及促进印度空间技术的发展。
IRNSS的缺点包括建设周期长 、技术难度大,以及与其他全 球卫星导航系统的兼容性问题
。
欧洲伽利略系统
欧洲伽利略系统(Galileo)是由欧盟自主建立的全球 卫星导航系统。
输标02入题
该系统由30颗卫星组成,旨在为全球用户提供高精度、 可靠和安全的定位、导航和授时服务。
ቤተ መጻሕፍቲ ባይዱ
位置计算
根据多颗卫星的信号测量 结果,使用三角测量法计 算接收机的三维位置和时 间。
02
全球卫星导航系统
GPS系统
概述
GPS系统是由美国建设和维护的全球卫星导航系统,提供全球覆盖的高精度定位和时间服 务。
组成
GPS系统由空间段、控制段和用户段三部分组成。空间段包括多颗卫星,控制段包括地面 监控站和数据中心,用户段包括GPS接收机和数据处理软件。
教案26(卫星导航系统 )

一、GPS系统概述 二、GPS系统组成
GPS是NAVSTAR global positioning system的简称,即导航星全球定位系统。 利用多颗高轨道卫星,测量距离和距离变 化率来精确测定用户位置、速度和时间等 参数的卫星导航系统。船舶利用GPS接收 机进行导航定位,其精度为100米,且使用 方便。广泛应用于远洋船舶。
(2)热启动 定义:GPS导航仪关机后,位置变化不超过100英里 (有的导航仪不超过600 n mile)时或关机日期不超过3个 月(有的导航仪不超过6个月)时,且导航仪内保存有卫 星星历时的启动称为导航仪的热启动。 方法:不需要向导航仪输入初始数据。接通电源后, 最多不超过20 min就可以自动定位。 (3)日常启动 定义:船舶在航行或停泊时,GPS导航仪关机后再启动,称 为导航仪的日常启动。 方法:不需初始化输入。是GPS导航仪经常的开机方式,开 机后马上就可以自动定位。
一、GPS系统概述
主要作用:二维定位及二维测速;或三 维定位三维测速等。 优点:全球、全天候、实时、高精度定 位。 缺陷:不能在水下定位;受人为因素影 响大。
二、GPS系统组成
由空间系统(导航卫星)、地面控制系 统(地面站)和用户(导航仪)三部分组 成的。 1、导航卫星
图8-12 GPS系统图
图8-14 GP-500型导航仪面板
3、GPS导航仪主要功能 (1)船位计算和显示功能 每隔3s~5s更新一次船位,显示的船位分为GPS船位和DR (dead reckoning)船位。当设定的HDOP<定位的 HDOP时,显示DR船位。当设定的HDOP>定位的HDOP 时,显示GPS船位。 (2)导航功能 计算显示航向、航速;具有偏航报警和到达报警的音 响和图示;计算显示风流压差;标绘航迹和航路点。 (3)航线设计功能 可输入存储10条以上航线(route),每条航线可以 设定10航路点(waypiont)。计算显示到某一航路点的航 向、距离、到达时间等。
gnss课程设计

gnss课程设计一、课程目标知识目标:1. 让学生了解GNSS(全球导航卫星系统)的基本概念、原理及其在日常生活和国家发展中的应用。
2. 掌握GNSS系统的组成、工作原理及主要功能。
3. 理解GNSS信号传播过程中可能出现的误差及其影响。
技能目标:1. 培养学生运用GNSS进行定位、导航和授时等实际操作能力。
2. 能够分析GNSS信号传播的误差来源,并采取相应措施进行修正。
3. 学会使用GNSS相关软件和设备,进行数据采集、处理和分析。
情感态度价值观目标:1. 培养学生对GNSS技术及其应用的兴趣,激发学生探索科技创新的热情。
2. 增强学生的国家意识,认识到GNSS技术在国家安全、经济建设等方面的重要作用。
3. 培养学生合作、探究的学习精神,提高学生面对问题、解决问题的能力。
课程性质分析:本课程属于科技实践类课程,以实践操作为主,理论讲解为辅。
结合学生年级特点,注重培养学生的学习兴趣和动手能力。
学生特点分析:学生年级为初中,具有一定的物理知识基础,对新事物充满好奇,喜欢动手实践。
但可能对抽象的理论知识理解和应用能力有限。
教学要求:1. 注重理论与实践相结合,让学生在实际操作中掌握GNSS知识。
2. 教学过程中要关注学生的个体差异,因材施教,提高教学质量。
3. 创设生动活泼的课堂氛围,激发学生的学习兴趣,培养其创新精神和实践能力。
二、教学内容1. GNSS基本概念与原理- GNSS定义、发展历程及应用领域- GNSS系统组成、工作原理及功能- 教材章节:第一章 全球导航卫星系统概述2. GNSS信号传播与误差分析- GNSS信号传播过程及影响因素- 常见误差类型、产生原因及修正方法- 教材章节:第二章 GNSS信号传播与误差分析3. GNSS定位与导航技术- GNSS定位原理、分类及方法- 导航系统组成、工作流程及应用实例- 教材章节:第三章 GNSS定位与导航技术4. GNSS在实际应用中的案例分析- GNSS在交通、测绘、农业等领域的应用案例- 案例分析与讨论,总结GNSS技术的优势与局限- 教材章节:第四章 GNSS应用案例分析5. GNSS设备操作与数据处理- GNSS接收机、天线等设备的使用方法- 数据采集、处理和分析的基本步骤- 教材章节:第五章 GNSS设备操作与数据处理教学进度安排:第1周:GNSS基本概念与原理第2周:GNSS信号传播与误差分析第3周:GNSS定位与导航技术第4周:GNSS在实际应用中的案例分析第5周:GNSS设备操作与数据处理教学内容确保科学性和系统性,注重理论与实践相结合,以教材为基础,结合实际案例,提高学生对GNSS技术及其应用的理解和掌握。
卫星导航课程整理

第一章1.GPS的系统组成(包括一些关键参数)及各个部分的作用。
(p3)空间部分:GPS卫星作用:①接收、存储导航电文②生成用于导航定位的信号(测距码、载波)③发送用于导航定位的信号(采用双相调制法调制在载波上的测距码和导航电文)④接受地面指令,进行相应操作⑤其他特殊用途,如通讯、监测核暴等。
地面控制部分:①监视卫星运行②确定GPS时间系统③跟踪并预报卫星星历和卫星钟状态④向每颗卫星数据存储器注入卫星导航数据用户设备部分:接收机的主要功能:①迅速捕获按一定卫星截止高度角所选择的待测卫星信号,并跟踪这些卫星;②对所接收到的卫星信号进行变换、放大和处理,以便测定出GPS信号从卫星到接收天线的传播时间;③解译出GPS卫星所发送的导航电文;2.GPS现代化计划包括哪些内容。
(p10)①在GPS现代化第一阶段,发射12颗改进的GPS BLOCKⅡR型卫星,它们具有一些新的功能②在GPS现代化第二阶段,发射6颗GPS BLOCKⅡF型卫星③在GPS现代化计划的第三阶段,发射12颗改进的GPS BLOCKⅢ型卫星,在2003年完成代号为GPSⅢ的GPS完全现代化计划设计工作。
3.北斗卫星导航系统的定位原理。
(p15)BD系统是主动式双向测距二维导航。
地面中心控制系统解算,供用户三维定位数据。
第二章1.春分点的定义及其作用。
(p19)定义:太阳的视位置由南向北通过赤道的交点。
作用:春分点和天球赤道面是建立坐标系的重要基准点和基准面。
2.岁差、章动和极移的区别。
(p20、24)岁差和章动指的是地球连同它的自转轴一起在空间转动,但地球和自转轴之间并未发生相对运动,只会影响恒星的赤经赤纬,不会影响地面测站的坐标。
极移是地球相对于自转轴的转动,但它并不影响地球自转轴在空间的指向,因而极移会使地面测站的坐标发生变化,不会影响恒星的天球坐标。
3.天球坐标系如何转换到地球坐标系。
4.时间测量的类型。
(1)相对时间测量(2)绝对时间测量5.时间系统的类型及对应的空间参考点。
导航相关课程设计

导航相关课程设计一、课程目标知识目标:1. 让学生理解导航系统的基本原理和组成部分,掌握卫星导航、地图导航等基本知识。
2. 使学生了解导航技术在现实生活中的应用,如交通、军事、户外探险等领域。
3. 帮助学生了解导航技术的发展历程,以及我国在导航领域的重要成果。
技能目标:1. 培养学生运用导航软件进行地图查看、路线规划、位置定位等实际操作能力。
2. 提高学生分析问题、解决问题的能力,能在实际情境中运用导航知识解决相关问题。
3. 培养学生的团队协作能力,学会在小组讨论中分享观点、倾听他人意见。
情感态度价值观目标:1. 培养学生对导航技术产生兴趣,激发学习热情,树立科技创新意识。
2. 培养学生遵守交通规则,关爱生命,养成良好的社会责任感。
3. 增强学生的国家自豪感,认识到我国在导航技术领域的成就,激发为祖国发展贡献力量的愿望。
课程性质:本课程为综合性实践活动课程,旨在通过实践操作、小组合作等方式,让学生掌握导航知识,提高实际应用能力。
学生特点:六年级学生具有一定的信息素养,对新事物充满好奇,喜欢动手实践,具备一定的团队协作能力。
教学要求:注重理论与实践相结合,关注学生的个体差异,鼓励学生积极参与,充分调动学生的主观能动性。
通过课程学习,使学生能够将所学知识应用于实际生活,提高解决问题的能力。
二、教学内容1. 导航系统的基本原理:讲解卫星导航系统的组成、工作原理,如GPS、北斗等。
- 教材章节:第三章《卫星导航系统》- 内容列举:卫星轨道、信号传播、接收机原理等。
2. 导航技术在生活中的应用:介绍导航技术在交通、军事、户外探险等领域的应用。
- 教材章节:第四章《导航技术的应用》- 内容列举:地图导航、智能交通、无人驾驶等。
3. 导航软件操作与实践:教授学生使用导航软件进行地图查看、路线规划、位置定位等操作。
- 教材章节:第五章《导航软件操作与应用》- 内容列举:软件安装与使用、地图浏览、路线设置、位置分享等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章1.GPS的系统组成(包括一些关键参数)及各个部分的作用。
(p3)空间部分:GPS卫星作用:①接收、存储导航电文②生成用于导航定位的信号(测距码、载波)③发送用于导航定位的信号(采用双相调制法调制在载波上的测距码和导航电文)④接受地面指令,进行相应操作⑤其他特殊用途,如通讯、监测核暴等。
地面控制部分:①监视卫星运行②确定GPS时间系统③跟踪并预报卫星星历和卫星钟状态④向每颗卫星数据存储器注入卫星导航数据用户设备部分:接收机的主要功能:①迅速捕获按一定卫星截止高度角所选择的待测卫星信号,并跟踪这些卫星;②对所接收到的卫星信号进行变换、放大和处理,以便测定出GPS信号从卫星到接收天线的传播时间;③解译出GPS卫星所发送的导航电文;2.GPS现代化计划包括哪些内容。
(p10)①在GPS现代化第一阶段,发射12颗改进的GPS BLOCKⅡR型卫星,它们具有一些新的功能②在GPS现代化第二阶段,发射6颗GPS BLOCKⅡF型卫星③在GPS现代化计划的第三阶段,发射12颗改进的GPS BLOCKⅢ型卫星,在2003年完成代号为GPSⅢ的GPS完全现代化计划设计工作。
3.北斗卫星导航系统的定位原理。
(p15)BD系统是主动式双向测距二维导航。
地面中心控制系统解算,供用户三维定位数据。
第二章1.春分点的定义及其作用。
(p19)定义:太阳的视位置由南向北通过赤道的交点。
作用:春分点和天球赤道面是建立坐标系的重要基准点和基准面。
2.岁差、章动和极移的区别。
(p20、24)岁差和章动指的是地球连同它的自转轴一起在空间转动,但地球和自转轴之间并未发生相对运动,只会影响恒星的赤经赤纬,不会影响地面测站的坐标。
极移是地球相对于自转轴的转动,但它并不影响地球自转轴在空间的指向,因而极移会使地面测站的坐标发生变化,不会影响恒星的天球坐标。
3.天球坐标系如何转换到地球坐标系。
4.时间测量的类型。
(1)相对时间测量(2)绝对时间测量5.时间系统的类型及对应的空间参考点。
①世界时系统1>恒星时:由春分点的周日视运动确定的时间2>平太阳时:以平太阳连续两次经过本地子午圈的时间间隔3>世界时:以子夜零时起算的格林尼治平太阳时②原子时:以原子能级间的跃迁特征为基础③协调世界时:以原子时秒长为尺度,时刻上接近于世界时的一种折衷时间系统④GPS时间系统(GPST):由GPS主控站的原子钟控制第三章cos cos s s s s sa E r f a e =+()cos cos s s s s a f E e r =-()2cos cos 1cos 1sin sin 1cos s s s s s s s s s s E e f e E e E f e E -⎧=⎪-⎪⎨-⎪=⎪-⎩1tan tan 212s s s s f e E e +⎛⎫⎛⎫= ⎪ ⎪-⎝⎭⎝⎭1.开普勒轨道参数有哪些。
(p40)a s :轨道椭圆的长半径 e s :轨道椭圆的偏心率 f s :真近点角 i :轨道面的倾角 Ω:升交点的赤经 ωs :近地点角距2.真近点角的计算步骤。
(p41)3.GPS 的信号结构及对应的作用。
(p54)GPS 卫星的基准频率f 0:搭载其它调制信号 测距 测定多普勒频移4.星历的类型及区别。
(p51)预报星历(广播星历) 后处理星历(精密星历)第四章1.伪距和载波如何实现测距。
(p64)伪距:接收机必须产生相同结构的测距码(复制码),如果接收机不能产生相同结构的测距码,则不能进行伪距测量。
接收机具有连续跟踪卫星信号的能力载波:将所接收到的调制信号(卫星信号)与接收机产生的复制码相乘。
2.GPS 伪距单点定位时,为何需要同时观测至少4 颗GPS 卫星。
3.静态相对定位载波测量中采用求差法的原因,求差法有什么缺点。
(p73)4.差分定位的类型及各自的特点。
(p78)(1)位置差分:差分改正计算的数学模型简单、差分数据的数据量少、基准站与流动站要求观测完全相同的一组卫星(2)距离差分:差分改正计算的数学模型较复杂、差分数据的数据量较多、基准站与流动站不要求观测完全相同的一组卫星(3)单基准站局域差分:优点:结构、模型简单缺点:差分范围小,精度随距基准站距离的增加而下降、可靠性差(4)多基准站局域差分:优点:差分精度高、可靠性高,差分范围增大缺点:差分范围仍然有限,模型不完善(5)广域差分(W ADGPS ):优点:差分精度高、差分精度与距离无关、差分范围大 缺点:系统结构复杂、建设费用高(6)伪距差分:优点:基准站提供所有卫星的改正数,用户接收机只要观测任意4颗卫星 就可以完成定位。
缺点:差分精度随基准站到用户的距离增加而减少。
(7)载波相位差分:可以使实时三维定位精度达到厘米级5.周跳产生的原因及处理方法。
1、信被遮挡,导致卫星信号无法被跟踪2、仪器故障,导致差频信号无法产生3、卫星信号信噪比过低,导致整周计数错误4、接收机在高速动态的环境下进行观测,导致接收机无法正确跟踪卫星信号5、卫星瞬时故障,无法产生信号周跳的探测与修复设法找出周跳发生的时间和大小屏幕扫描法高次差或多项式拟和法在卫星间求差法用双频观测值修复周跳根据平差后的残差发现和修复整周跳变参数法将周跳标记出来,引入周跳参数,进行解算8.RTK 的定位原理及系统组成。
原理:在基准站上安置1台接收机为参考站, 对卫星进行连续观测,并将其观测数据和测站信息,通过无线电传输设备,实时地发送给流动站,流动站GPS 接收机在接收GPS 卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差△X 、△Y 、△H ,加上基准坐标得到的每个点的WGS -84坐标,通过坐标转换参数得出流动站每个点的平面坐标X 、Y 和海拔高H )。
组成:基准站网、数据处理中心、数据通信链路、用户部分第六章1.星历误差对单点定位和相对定位的影响。
星历误差对单点定位的影响主要取决于卫星到接收机的距离以及GPS 卫星与接收机构成的几何图形。
广播星历误差对测站坐标的影响一般可达数米至数十米。
星历误差对相对定位的影响4711~4102.51010b s b km ρρ-∆∆⎛⎫= ⎪⎝⎭=⨯取,则广播星历对相对定位的影响为级。
2.卫星钟误差的处理方法有哪些。
1.钟差改正多项式 ()()2210oc s oc s t t t a t t a a s -+-+=∆τ其中a0为ts 时刻的时钟偏差,a1为钟的频偏,a2为频漂。
2.可以通过相对定位进一步消除3.采用IGS 提供的精密钟差(精度可达0.1ns )4.在某些场合直接忽略卫星钟差3.电离层折射误差有哪些处理方法。
经验模型改正方法:根据以往观测结果所建立的模型改正效果:差双频改正方法:利用双频观测值直接计算出延迟改正或组成无电离层延迟的组合观测量效果:改正效果最好实测模型改正方法:利用实际观测所得到的离散的电离层延迟(或电子含量),建立模型(如内插) 效果:改正效果较好4.对流层折射误差有哪些处理方法。
1.直接在测站测定气象参数,用于上述对流层折射改正模型。
2.引入描述对流层影响的附加待估参数,在数据处理中一并求得。
3.利用同步观测值求差。
5.多路径误差产生的原因及应对措施。
原因:在GPS 测量中,被测站附近的物体所反射的卫星信号(反射波)被接收机天线所接收,与直接来自卫星的信号(直接波)产生干涉,从而使观测值偏离真值产生所谓的“多路径误差”。
(多个反射信号同时进入接收天线)应对措施:观测上 选择合适的测站,避开易产生多路径的环境硬件上采用抗多路径误差的仪器设备抗多路径的天线:带抑径板或抑径圈的天线,极化天线抗多路径的接收机:窄相关技术MEDLL 等数据处理上 加权、参数法、滤波法、信号分析法第七章1.GPS 网的基准有哪些。
位置基准 一般由给定的起算点坐标决定尺度基准 1.由地面的电磁波测距边确定2.已知点间的固定边3.GPS 网中的基线向量* 方位基准 1.由网中的起始方位角提供 2.由GPS 网中的各基线向量来共同提供*2.GPS 网的特征条件计算方法。
()()()()/GPS 1/21111n m N C C n m NJ C N N J C N J n J J J C N n ⋅=⋅⋅-=⋅-=-=-=⋅---总独必必独多若某工程中包含个网点,每个点设站次数为,接收机台数为,则观测时段数为:=该网中共有基线向量数为:独立基线数为:必要基线数为:多余基线数为:3.接收机检验的内容内容 GPS 接收机的检定、气象仪器的检定、其它设备的检验第八章1.GPS 数据处理包含的流程。
四个阶段:数据传输、格式转换(可选)、预处理、基线处理、网平差2.卫星轨道标准化的目的。
(1)得到某一时间段内平滑的轨道数据(2)将不同类型的轨道数据转换为统一的形式3.GPS 网平差类型的划分。
根据进行平差的空间三维平差 在三维空间中进行 数学模型是严密的 适用于任何网,特别是大规模的网二维平差 在二维平面上进行 将平面坐标分量与高程分量分离,忽略了两者之间的相关性,数学模型进行了一定的近似 适用于小规模的网根据观测值和已知条件的情况无约束平差 观测值全为GPS 观测值 已知条件不使网产生由非观测量所引其的变形 约束平差 观测值全为GPS 观测值 已知条件使网产生由非观测量所引其的变形联合平差 观测观测值除了GPS 观测值已外,还包括其它常规几何观测值5.GPS 网平差的目的。
(1)发现剔除粗差(2)确定待定点坐标及其它参数(在指定基准下)(3)精度评定6.高程系统的类型。
大地高系统、正高系统和正常高系统大地高系统是以参考椭球面为基准面的高程系统。
某点的大地高是该点到通过该点的参考椭球的法线与参考椭球面的交点间的距离。
大地高也称为椭球高,大地高一般用符号H 表示。
大地高是一个纯几何量,不具有物理意义,同一个点,在不同的基准下,具有不同的大地高。
正高系统是以大地水准面为基准面的高程系统。
某点的正高是该点到通过该点的铅垂线与大地水准面的交点之间的距离,正高用符号Hg 表示。
正常高系统是以似大地水准面为基准的高程系统。
某点的正常高是该点到通过该点的铅垂线与似大地水准面的交点之间的距离,正常高用Hr 表示。
()()()()()()GPS 8054804645GPS 164546402216442567925679177C n m C N C N N J J C N J J J J ⋅⨯==⋅⋅-⨯⨯====⋅-=⨯===-=-=总独必必独多若网由个站组成,现准备用台接收机来进行观测,每个站设站次数为次,则全网的观测时段数为:=该网中共有基线向量数为:条独立基线数为:条必要基线数为:条多余基线数为:条。