无锡海鹰系列测深仪介绍
星站差分GPS在长江三峡库区水下地形测量中的应用
星站差分GPS在长江三峡库区水下地形测量中的应用摘要:介绍星站差分GPS原理,通过SF-3040型星站GPS与GPS RTK在长江三峡库区河段的测试,结果表明SF-3040型星站GPS性能稳定、高效、高精度适合运用三峡库区水下地形测量。
关键词:星站差分GPS 三峡库区水下地形测量长江三峡库区航道在2008年175 m试验性蓄水后,水位的日变化随着三峡大坝的下泻流量而变化,日变幅最大0.2 m,水面高程相对比较稳定,本文详细介绍采用SF-3040型星站差分GPS在三峡库区水下地形测量中的应用。
1 水下地形测量的组成水下地形测量由硬件部分和软件部分组成,不管硬件部分还是软件部分都是水下地形测量不可分离的重要组成部分,在平面定位中所采用的GPS直接影响着测量作业的精度和效率。
1.1 硬件部分(1)测量专用船艇(长9.28 m,宽 2.5 m);(2)无锡海鹰测深仪HY-1600型号,测深精度为0.05+0.01Hm;(3)电脑;(4)SF-3040型星站GPS(或GPS RTK 1+1);(5)各种端口数据线。
1.2 软件部分(1)星站差分GPS设置软件:StarUtil-3000;(2)测量导航软件:南方自由行;(3)内业成图软件:清华山维。
2 星站差分GPS原理[2]星站差分GPS属于广域差分GPS(de area DGPS,W ADGPS)范畴,Starfire星站差分网络系统最初是John Deere&Co.和NavCom Technology Inc两家公司开发的广域差分矫正定位系统。
地面参考站网络由28个遍布全世界的高性能双频GPS接收机构成,数据处理中心将这些数据发送到3个地面卫星注入站(分别位于英格兰Goonhilly、加拿大Laurentides和新西兰Auckland),由这些卫星将差分矫正信号向全球播放。
3 星站差分GPS与GPS RTK在长江三峡库区河段的测试和应用为了测试SF-3040型星站GPS在三峡库区水下地形测量中的精度和效率,选择了在长江三峡库区鳊鱼溪(145 km)至万州(330 km)共155 km航道固定水下断面测量时进行测试。
单波束水深数据处理时遇到的一些问题的解决方法
单波束水深数据处理时遇到的一些问题的解决方法摘要:水深测量数据处理是整个水深测量过程中的一个重要环节,测量数据处理技术和方法直接影响成果的质量、数量及其应用。
在单波束测量时,因一些误操作,可能在数据处理时显示一些错误信息,导致内业工作不能正常进行,在此文中简单介绍了单波束水深测量原理和HYPACK软件在处理水深数据方面的应用,主要阐述了内业处理时水深数据显示异常的原因和解决方法,来保证测量工作有序开展。
关键词:单波束水深测量数据处理 HYPACK软件问题解决方法1单波束水深测量原理单波束水深测量系统由信标机(或RTK)和HY1600单波束测深仪组成。
信标机获取平面坐标,测深仪获取瞬时水深值,经过内业处理,即可得到海底三维坐标。
单波束测深原理:单波束测深仪的测深过程,是采用换能器垂直向下发射短脉冲声波,当这个脉冲声波遇到海底时发生反射(散射、衍射不考虑),反射回波返回声纳,并被换能器接收[1]。
其水深值由声波在海底间的往返时间和水介质的平均声速确定,即为瞬时水深值(如图1)。
测得的瞬时水深值与换能器吃水深度改正值和潮位改正值之和,即得到实际水深,即图载水深。
图1 单波束水深测量工作示意图2 HYPACK MAX 软件在疏浚测量中的应用介绍HYPACK MAX软件是美国coastal海洋图像公司推出的产品[2]。
该软件除了具备强大的测量成图系统功能外,还可与导航系统、测深仪(单波束、多波束)、波浪补偿器、绘图仪、打印机、潮位遥报仪、罗盘、耙臂等多种测量、疏浚施工设备相连接,分别组成自动化数字测绘系统和疏浚工作实时监测系统[3]。
是目前在测量、疏浚上使用最广泛的一种软件。
自软件引进并投入到水深测量工作以来,工作的质量和效率得到了极大的提高,在业界好评如潮。
其中,HYPACK软件在单波束水深测量的外业数据采集和内业处理方面起到了关键性作用,使用HYPACK软件对水深数据进行编辑处理,以及对吃水,声速,潮位进行改正处理,得到所需的图载水深XYZ文件。
无锡海鹰HY1600测深仪说明书

42mm×700mm,3 节 5kg 不锈钢管
4
覃辉编著图书光盘附
工作环境: 环境温度: 相对湿度: 储运环境: 环境温度: 相对湿度:
HY1600 测深仪使用说明书 ver1.0
0℃~40℃ ≯85%
-40℃~55℃ ≯85%
1.5 接口
(4 0.40 ms)
26
盲区
000.0--300.0
பைடு நூலகம்
5位
带*的命令仅在待机状态下有效。
2) 测深仪接收串口命令:
计算机对测深仪仅能发送不多的串口命令,各命令的格式和说明如下:
命令格式
说明
HEX 14
记录仪停止打印
HEX 12
记录仪重新打印
HEX 06 或 HEX f0
串口定标
在每一次串口定标时,当定标注释置为“开”,测深仪可以在记录器上最多打印 80
率;提供整个系统的同步信号;将 A/D 采样数据传送给记录电路;处理数据,求得测深
值,传送给显控电路和记录电路;保持动态跟踪。
打印电路所完成的主要功能是:记录纸走速可控:1cm/min~20cm/min,也可与发
射周期同步;实时打印模拟测深信号(与背景发生重叠时作反白处理);打印定标线及
相应的注释;系统菜单打印。
8 3/3
覃辉编著图书光盘附
HY1600 测深仪使用说明书 ver1.0
个 ASCII 码字符。 当测深仪的 Com1 收到一个 HEX 06 紧接再收到 HEX 01 后,测深仪将连续接收最
DESO 25 格式:
字符序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14
海鹰公司新推近海测深仪
力量 ,利 用一 切 可 以利 用 的资 源 ,自动
化 全体 员 -/班 加 点全 力投 入 1 0 吨船 r; - ̄ ] 00
2 5 目前该起重机的电气 系统设计已经 用起 重 机 的 制造 中去 ,抓 紧在 1 —1 天
主机 柜 内部包 含 了一 套 高性 能 的 工 控计
据 了 解 , 近 年 来 ,海 加 公 司 通 过
算 机 系 统 和 两套 互 相 备份 的收 发 机 。该 自主研 发 、与 国 内科 研 院 所合 作 开 发 等 设 备 以高 速 数字 信 号处 理器 ( S 为核 方式 加大 了产 品 开发 力 度 。并对 研 发 队 D P)
■ d P 报介s 产¨品s rC皿 品t绍 o 产o 快E X r
海鹰公司新推近海测深仪
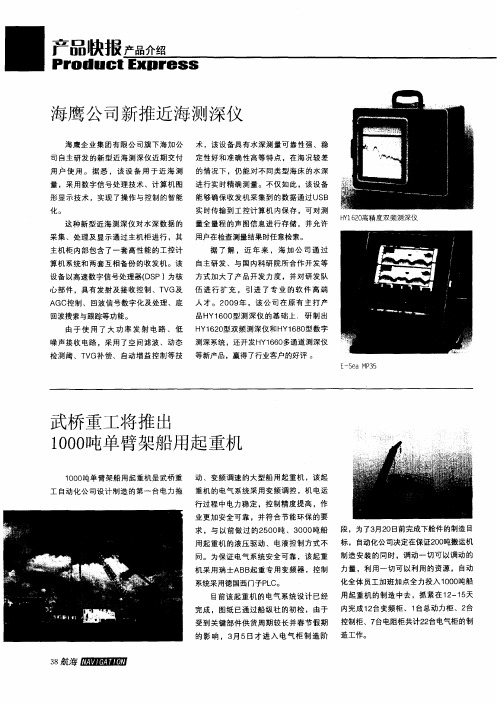
海 鹰 企 业 集 团 有 限公 司旗 下 海 加 公 术 ,该设 备 具 有 水 深测 量 可 靠 性 强 、稳
司 自主 研 发 的新 型 近 海 测 深仪 近 期 交 付 定 性 好和 准 确 性 高 等特 点 ,在 海 况较 差 用 户 使 用 。 据 悉 , 该 设 备 用 于 近 海 测 的 情 况 下 ,仍 能 对 不 同类 型 海 床 的水 深 量 ,采 用 数 字信 号 处 理 技术 、计 算 机 图 进 行 实 时精 确 测 量 。不 仅 如 此 ,该 设 备 形显 示 技 术 ,实现 了操 作 与控 制 的 智 能 能 够 确保 收 发 机 采集 到 的 数 据通 过 U B S
心 部 件 。具 有发 射 及 接收 控 制 、T G及 伍 进 行 扩 充 ,引 进 了 专 业 的软 件 高 端 V 09 A GC控制 、回波 信 号 数字 化及 处 理 、底 人 才 。2 0 年 ,该 公 司 在 原 有 主 打 产
无锡海鹰HY1680 测深仪使用说明书

仪的工作,并能显示、保存、回放测深仪测量的水下声图。(内置差分 GPS 板、 二合一 GPS 天线、GPS 电缆三者为 GPS 模块选配件,用户可以根据实际需要选 择。)
HY1680 测深仪的正常工作需要计算机运行由厂家随测深仪一起提供测深仪 工作软件(DFNow.exe),该软件用于配置测深仪的工作参数,显示、保存测深 仪测量的水下声图。此时计算机的 USB 口必须与 HY1680 测深仪的数据口相连。
(注意:当使用的计算机非厂家标配的计算机时,严禁上述操作。如果强 行进行此项操作有可能造成计算机永久损坏!)
图 2-2
4
2. 3 测深仪工作时的连接
HY1680 使用说明书
图 2-3 按 HY1680 测深仪面板(图 2-3)标识所示,在使用 HY1680 测深仪工作前, 连接双频换能器、交流(或者直流)电源插座;将测深仪的数据口与计算机的 USB 口相连。 HY1680 测深仪面板左右各有三个 RS232 串口。面板左面的三个串口为 COM1、COM2 与 GPS Out2;右面的三个串口为 GPS Out1、GPS In 与 Heave In。 其中 GPS Out1、GPS Out2 在安装了差分 GPS 模块的测深仪中用于输出 GPS 数据;GPS In 用于 HY1680 连接 GPS 设备,使得测深仪接收到 GPS 数据;Heave In 用于连接涌浪设备,使得测深仪接收涌浪数据;COM1 与 COM2 为两个标准 RS232 串口,用于测深仪输出水深数据及接收串口定标命令,或连接外接显示器 等外部设备。
530mm×440mm×215mm 15kg
水深测量中声速改正方法分析(修改)

水深测量中声速改正方法分析杨仁辉(中交广州航道局有限公司,广州,510221)摘要:本文介绍了水深测量中声速测量的两种方法,以HY1200声速仪为例,着重介绍了声速剖面仪的原理、软件应用以及平均声速的计算方法,并且对两种方法进行了比较、分析。
关键词:测试板法;声速剖面仪;HY1200系列;平均声速;声速改正数Correction for Acoustical velocityin Echo SoundingYANG Ren—hui(CCCC Guangzhou Dredging CO.,LTD.,Guangzhou 510221)Abstract: This paper introduces the method of test board and SVP,the focus is the principle、application software and average sound velocity of HY1200SVP.Then it discusses the diffenrent of test board and SVP.Key words:test board;Sound Velocity Profiler;HY1200SVP;average sound velocity;correction of sound velocity data1.引言水深测量通常采用回声测深系统进行测量。
回声测深系统的原理非常简单,主要是以声速和声速往返时间来计算水深,即:H=V×T/2(1)其中:V为声速、T为声速往返时间。
这里,声速往返时间是由系统感知计算得到的,声速由测量人员测定,所以为了得到相对精确的测量结果,声速的测定就成为水深测量过程中非常重要的一个步骤。
对于声速的测定我们一般采用两种方法,测试板法和声速剖面仪法。
测试板法和声速剖面仪是根据两种不同的思路设计的。
下面我们简单叙述一下这两种方法是如何测定声速的。
CM2型侧扫声纳操作手册-中文版

行测量数据重放和编辑的功能,该软件是 C-MAX 公司开发的免费分发的软件。(请注 意 MaxView 的操作说明不包含在本手册中) ◆ 拖鱼的接口和远距离遥控测量支持其它的 内接或外接的传感器。 ◆ 有多种可供选择的大功率绞车,同时有对较 短电缆的人工绞车。 ◆ 如果需要硬拷贝记录,有多种打印机可供选 择。 ◆ 远距离控制运行器(ROV)的配置可通过数 字化远距离遥控测量相关的接口来实现。
阅读本手册的重要性 CM2 的使用是比较简单的。系统的某些方面是比 较独特的,但即使是熟练的操作人员也应该在阅 读完本手册之后,才开始使用。 请遵照以下的注意事项。 用户的信息在显示器上有显示,只要按 INFO 键 即可。
无锡海鹰加科海洋技术有限公司 版权所有 翻录必究
3
CM2 侧扫声纳系统用户操作手册 C-MAX Ltd 2004-2.1 版本
任何外部设备,包括导航(NAV)数据源或回声 测深仪,在连接到 CM2 端口前,都必须检查接 地电压。其接地电压必须与 CM2 的数据采集器 的额定电压一致。如果不一致,则内部中央处理 器的印刷电路板(PCB)会被损坏。(该种损坏不 在保修范围之内)
单 CTU(控制/收发装置)的配置 如果一个第三方(非 C-MAX)的数据采集和显 示系统被使用,则 CM2 的拖鱼会通过一个 CM2 的控制/发送器(CTU)去连接那个第三方的系统, 而不是通过 CM2 的数据采集器、键盘和跟踪球 或鼠标。 参考附录 A3 中关于控制/发送器(CTU)的操作。
任何滑轮或导缆孔必须不小于所使用电缆的半径 大小,建议考虑使用较大的滑轮或导缆孔。使用 滑轮能降低磨损和减小回收拖缆所需要的力。 通常滑轮应当悬挂于横梁之上,当船转向而拖鱼 拖缆往前时,滑轮能够向任何一方移动。不管是 拖鱼,还是拖鱼拖缆,都必须设置于不会缠绕住 螺旋桨或方向舵或其它任何设备的位置。也许某 个中间位置能减小拖鱼拖缆由于船的摇晃而产生 的振荡,但却必须注意
漫谈水深测量

漫谈水深测量水深测量是直接为港口、航道及其配套设施建设提供水下地形资料的一项基础性测量。
在常规的水深测量中,以前方交会法为例,它需要配备10余人才能开展工作,当GPS进入测深领域,作业人员大为减少,但还是由水位观测、定位、测深等项工作所组成。
下面就这三项漫谈一下个人的体会。
1 水位观测当测量面积不大,在某一水位站的有效控制范围内,用该站的水位资料对所测的水深进行改正即可。
当测量面积较大时,所设置的二个水位站控制范围不能相互重叠,又因环境和其他条件所限,无法增设水位站时,水位的改正则需采用分带改正的方法。
水位分带改正方法适用于海区和内河的感潮河段,它要求相邻水位站的潮波方向基本一致,潮时和潮高的变化与距离成正比。
当测线离岸较远时,不仅要考虑瞬间海面在潮波传播方向的倾斜,还要考虑瞬间海面在側向的倾斜。
这就是三站间的水位改正(三角分带改正)。
水尺应设在能充分反映测区水位变化,无沙洲、浅滩阻隔、无壅水回流现象的地方,不能在小河口内、外,潮汐汊道,水闸下等设立,因这些地方潮波变形。
设立的水尺要防止干出或淹没,设置阶梯水尺相邻两根水尺要重叠20cm~30cm。
水尺零点高程以不低于图根水准精度要求接测,且要有校核,每天使用前,都应进行检查。
用于测深改正的水位一般每10分钟观测一次,读数至cm,当涨急、落急时应予以加密观测。
将观测的水位绘制水位过程曲线,正确的水位过程曲线应是正弦曲线,如有个别水位不正确,使水位曲线变异,可按曲线走向进行平滑,修改曲线。
用于改正水深的水位应从水位过程曲线上摘取。
2 测深定位:测深定位的方法有十余种,随着测量仪器的发展,一些定位方法已摒弃,目前我单位常用的有前方交会法、断面索法、GPS定位法。
2.1前方交会法前方交会法应以三架经纬仪同步交会,若用二架经纬仪交会,如果发生有啥差错,也无法追溯,这好比三角形测了二个内角,另一个角度是1800减出来的。
另外前方交会时,要注意交会角的大小,对三方向前方交会而言,最佳的交会角在85o~105o 之间,当交会角过大或过小时,其点位精度将衰减得很快。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
OHMEX潮位仪 测量范围:0~10m LCD实时显示波高数据 内置12V铅酸蓄电池 可连续工作10昼夜
E-Sea Tide 潮位仪 测量范围:0~10m 精度高、大容量内存 内置时钟,自动注释 结构紧凑、一体化设计 操作简便、携带方便
PRODUCTS: 海洋地球物理勘测设备
PRODUCTS: 海洋导航定位设备
“子午线”测量型电罗经
360°罗盘刻度和数字显示器 工作范围:
纬度(80°N~80°S) 速度(0~90节) 设定误差:0.1°secant latitude 静态误差:0.05°secant latitude 动态误差:0.2° secant latitude 标准IMO精度
声速测量范围: 1400~1600 m/sec
深度测量范围: 0~100 m
温度测量范围: 0~40℃
Windows中文处理软件
专用Kevlar吊放电缆
HY1200-B 自容式声速仪
声速测量范围: 1400~1600 m/sec
深度测量范围: 0~100 m
温度测量范围: 0~40℃
Windows中文处理软件
MAHRS三维姿态涌浪传感器
船艏向精度:0.1° 横摇与纵摇精度:0.03° 垂荡精度:5cm 无故障工作时间 >35,000小时 动态角更新率高达每秒200° 体积小、重量轻,兼容性好
USBL水下声定位系统
系统精度达到0.25° 可同时距离长达1500米的8个目 标进行追踪定位 最先进的光谱散射技术 应用最小、最轻的信号接收器 同等价位中性能更加卓越的定 位系统
Octopus360+浅地层剖面仪 兼容所有浅地层相关震源(穿透深度不低于80m)
包括:Pinger / Boomer / Sparker / Chirp 多种标准记录格式:XTF , SEGY & CDDA 内置硬盘和DVD可读写光驱记录数据 7个功能键,设置参数 15``高分辨率显示器,内置UPS
HY1700数字测深仪 单频、测深范围0~100 体积小、重量轻、便携 高强度PVC防水箱设计 LCD数码管显示 键盘设置参数
HY1620双频测深仪 24/208KHz双频可选 测深范围 0~1200m 热敏记录、LCD显示 河床淤泥界面分层显示
PRODUCTS: 海洋调查仪器
HY1200-A 直读式声速仪
无锡海鹰测深仪简明介绍: HY1700型数字测深仪
• 背光开关: 控制液晶屏背光的开启与关闭 ,默认状态为关闭,按键一次 开启,再按一次关闭。开启时 指示灯亮起,关闭时指示灯相 应熄灭。
无锡海鹰测深仪简明介绍: HY1700型数字测深仪
模拟控制
• 灵敏度:调节“灵敏度”电位器,可 改变测深仪接收机对从换能器接收到 的信号的放大量。
• 电源开关:控制仪器的开启与关闭
无锡海鹰测深仪简明介绍: HY1700型数字测深仪
功能键
• 测 深: 在任意状态,按下“测深”键,“测 深”键顶部的指示灯闪烁,则仪器进 入测深工作状态,同时显示水深数据 。
400×290×160mm 8kg
68×80mm 0.8kg 8m(可按要求增加长度)
30×350mm,4节 1.6kg 铝管
无锡海鹰测深仪简明介绍: HY1700型数字测深仪
功能键
菜单键
接口
模拟控制 参数调节键
无锡海鹰测深仪简明介绍: HY1700型数字测深仪 • 通讯接口 • 换能器接口
• 外接电源接口
————中国最早、最专业的水声设备生产商
公司产品系列
海
海
海
洋
洋
洋
测
调
地
绘
查
球
设
仪
物
备
器
理
勘
测
设
备
海
海
洋
洋
导
测
航
绘
定
相
位
关
设
软
备
件
系
统
PRODUCTS: 海洋测深设备
SDH-13D单频测深仪 单频、测深范围0~120 模拟记录 数字显示一体化
DSP、水底跟踪门技术
标准RS-232串口
键盘设置参数
HY1600单频测深仪 单频、测深范围0~300 功率、灵敏度可调 热敏记录、LCD显示 系统自检、菜单式操作 自动定标、注释标号
无锡海鹰
加科海洋技术
有限公司 HYDROGRAPHIC TECHNOLOGIES
系列测深仪介绍 Gordon Hargreave Chief Executive
专业水声生产与测试设备
水
下 压 力 测 试
ห้องสมุดไป่ตู้
试 验 水 池
设
备
电 子 器 件 贴 装 设 备
模 拟 环 境 试 验 站
无锡海鹰加科海洋技术有限公司
CM2数字双频旁侧声纳(拖鱼 & 工作站) 数字双频:325/100KHz , 780/325KHz (可选) 扫测范围:100~500m / 25~150m / 25~50m 波束俯角:10°或 20° 数据采集单元,功能一体化设计 附赠MaxView软件 Windows下进行数据回放、格式转化和成图等操作
仪器特点:
体积小、重量轻 一体化设计 内置电池、换能器和测量杆
无锡海鹰测深仪简明介绍: HY1700型数字测深仪
主要技术指标
• 功耗:
约8W
• 换能器: 208kHz(波束角≤8°)
• 分辨率: 0.01m
• 测量精度: ±0.1%所测深度±0.01m
• 输出功率: ≥ 80W
• 测深范围: 0.3m~100m
HY1700测深仪集 主机、换能器、测 量杆于一体,是一 种携带方便,使用 简单的精密水深测 量设备 。它采用 了DSP数字信号处 理等先进技术,能 实现对水深的实时 精确跟踪测量。
无锡海鹰测深仪简明介绍: HY1700型数字测深仪
仪 器 面 板
无锡海鹰测深仪简明介绍: HY1700型数字测深仪
PRODUCTS: 相关软件系统
HYPACK MAX 海洋导航测量软件
SonarWiz.Map 侧扫声纳图形镶嵌软件
CodaOctopus公司 GeoSurvey 软件包
荷兰QPS公司 QINSy导航测量软件
无锡海鹰测深仪简明介绍: 回声测深原理
无锡海鹰测深仪简明介绍: HY1700型数字测深仪
• 接口:
通讯RS232
• 显示: 尺寸数码段式液晶显示屏
• 电压: 10VDC~15VDC,标称值为12V
• 数据输出: SDH-13D 、Echotrac 、DESO 25
无锡海鹰测深仪简明介绍: HY1700型数字测深仪
• 主机 尺寸: 重量: • 换能器 尺寸: 重量: 电缆长度: • 测量杆 尺寸: 重量: 材料: