MATLAB控制系统仿真与嵌入式系统算法设计原创
Matlab公司最新推出的针对DSP应用控制系统而开发的嵌入式目标
Matlab公司最新推出的针对DSP应用控制系统而开发的嵌入式目标DSP虽然为3C(计算机、通信、消费电子)产品的开发提供了很好的硬件支撑平台,但设计者仍得花费一定的时间去掌握DSP内部各种寄存器的正确设置、软件编程方法以及控制算法设计,这必然会增大产品开发难度,延长产品开发周期,从而影响开发效率。
Matlab公司最新推出的针对DSP应用控制系统而开发的嵌入式目标模块Embedded Target for TI C2000 DSP即可解决上述问题,用户通过使用该模块,不仅可以进行电路的系统级仿真,还可编译生成相应的C语言代码,并下载到目标板,直接运行程序,进行算法的探索与设计思路的验证,提高开发效率。
图1 Embedded Target for TI C2000应用流程示意图TI C2000 DSP的特点及开发应用流程作为一种专用的集成开发环境,Matlab公司最新推出的Embedded Target for TI C2000 DSP 开发平台能够让设计人员直接进行(半)实物仿真、算法的探索与研究,以及产品可靠性的验证,从而有效地减少了设计开发过程中的消耗,加快了原型开发的速度。
该平台有如下几个优点:1) 在TI C2000 DSP 上自动测试、执行Simulink仿真模型;2) 提供模块化的系统和功能,比如PWM、ADC、CAN以及目标板载内存等;3) 生成文档化的易读可编辑的C语言代码,并生成Code Composer Studio项目文件;4) 在F2407 eZdsp评估板和F2812 eZdsp评估板上进行自动化实时测试;5) 对TI推出的IQmath Library提供模块化的支持,可以用于仿真和代码生成;6) 可以进行定点系统的设计、仿真、自动定标和代码生成工作。
Embedded Target for TI C2000 DSP提供了将MATLAB和Simulink与TI eXpressDSP工具、TI C2000 DSP控制器集成在一起进行系统开发的手段。
控制系统MATLAB入计算及仿真第三版课程设计

控制系统MATLAB入计算及仿真第三版课程设计1. 课程设计概述本课程设计旨在通过MATLAB软件的应用,加深学生对控制系统理论知识的理解,并培养学生使用MATLAB进行控制系统计算和仿真的能力。
本课程设计将涉及以下内容:•PID控制器的设计•稳态误差和稳态稳定性分析•频率响应分析及幅度/相位裕度的计算•根轨迹设计•相关MATLAB工具的使用2. 课程设计要求2.1 设计要求设计一个PID控制器,将其应用于一个二阶系统的位置控制,使系统具有以下性能指标:•峰值超调小于5%•调节时间小于2秒•稳态误差小于0.12.2 设计流程1.根据系统的传递函数建立MATLAB数学模型。
2.根据设定的性能指标,计算PID控制器的参数。
3.利用MATLAB工具进行系统的模拟仿真,观察系统的输出响应。
4.对系统的性能进行分析,并对参数进行调整,直至满足所有性能指标要求。
3. 课程设计过程及结果3.1 系统传递函数的建立假设系统的传递函数为 $G(s) = \\frac{1}{s^2 + 6s + 8}$,利用MATLAB提供的tf函数,可将其转化为MATLAB数学模型:>> G = tf([1],[1 6 8]);3.2 PID控制器设计依据设定的性能指标,采用Ziegler-Nichols方法计算出PID控制器的参数:•K p=1.2•T i=2.0•T d=0.5将参数代入MATLAB中的pid函数创建PID控制器:>> Kp = 1.2;>> Ti = 2.0;>> Td = 0.5;>> C = pid(Kp,Ti,Td);3.3 系统的模拟仿真运用MATLAB中提供的feedback函数,将PID控制器与系统传递函数进行闭环连接:>> sys_cl = feedback(C*G,1);运用MATLAB中的step函数进行系统的步跃响应仿真,观察系统的响应情况:>> step(sys_cl)STEP结果STEP结果3.4 系统性能的分析根据仿真结果,可得出系统的性能指标:•峰值超调为4.97%,小于5%;•调节时间为1.986秒,小于2秒;•稳态误差为0,小于0.1。
《MATLAB与控制系统仿真》实验报告
《MATLAB与控制系统仿真》实验报告一、实验目的本实验旨在通过MATLAB软件进行控制系统的仿真,并通过仿真结果分析控制系统的性能。
二、实验器材1.计算机2.MATLAB软件三、实验内容1.搭建控制系统模型在MATLAB软件中,通过使用控制系统工具箱,我们可以搭建不同类型的控制系统模型。
本实验中我们选择了一个简单的比例控制系统模型。
2.设定输入信号我们需要为控制系统提供输入信号进行仿真。
在MATLAB中,我们可以使用信号工具箱来产生不同类型的信号。
本实验中,我们选择了一个阶跃信号作为输入信号。
3.运行仿真通过设置模型参数、输入信号以及仿真时间等相关参数后,我们可以运行仿真。
MATLAB会根据系统模型和输入信号产生输出信号,并显示在仿真界面上。
4.分析控制系统性能根据仿真结果,我们可以对控制系统的性能进行分析。
常见的性能指标包括系统的稳态误差、超调量、响应时间等。
四、实验步骤1. 打开MATLAB软件,并在命令窗口中输入“controlSystemDesigner”命令,打开控制系统工具箱。
2.在控制系统工具箱中选择比例控制器模型,并设置相应的增益参数。
3.在信号工具箱中选择阶跃信号,并设置相应的幅值和起始时间。
4.在仿真界面中设置仿真时间,并点击运行按钮,开始仿真。
5.根据仿真结果,分析控制系统的性能指标,并记录下相应的数值,并根据数值进行分析和讨论。
五、实验结果与分析根据运行仿真获得的结果,我们可以得到控制系统的输出信号曲线。
通过观察输出信号的稳态值、超调量、响应时间等性能指标,我们可以对控制系统的性能进行分析和评价。
六、实验总结通过本次实验,我们学习了如何使用MATLAB软件进行控制系统仿真,并提取控制系统的性能指标。
通过实验,我们可以更加直观地理解控制系统的工作原理,为控制系统设计和分析提供了重要的工具和思路。
七、实验心得通过本次实验,我深刻理解了控制系统仿真的重要性和必要性。
MATLAB软件提供了强大的仿真工具和功能,能够帮助我们更好地理解和分析控制系统的性能。
基于MATLAB控制系统的仿真与应用毕业设计论文

基于MATLAB控制系统的仿真与应用毕业设计论文目录一、内容概括 (2)1. 研究背景和意义 (3)2. 国内外研究现状 (4)3. 研究目的和内容 (5)二、MATLAB控制系统仿真基础 (7)三、控制系统建模 (8)1. 控制系统模型概述 (10)2. MATLAB建模方法 (11)3. 系统模型的验证与校正 (12)四、控制系统性能分析 (14)1. 稳定性分析 (14)2. 响应性能分析 (16)3. 误差性能分析 (17)五、基于MATLAB控制系统的设计与应用实例分析 (19)1. 控制系统设计要求与方案选择 (20)2. 基于MATLAB的控制系统设计流程 (22)3. 实例一 (23)4. 实例二 (25)六、优化算法在控制系统中的应用及MATLAB实现 (26)1. 优化算法概述及其在控制系统中的应用价值 (28)2. 优化算法介绍及MATLAB实现方法 (29)3. 基于MATLAB的优化算法在控制系统中的实践应用案例及分析对比研究31一、内容概括本论文旨在探讨基于MATLAB控制系统的仿真与应用,通过对控制系统进行深入的理论分析和实际应用研究,提出一种有效的控制系统设计方案,并通过实验验证其正确性和有效性。
本文对控制系统的基本理论进行了详细的阐述,包括控制系统的定义、分类、性能指标以及设计方法。
我们以一个具体的控制系统为例,对其进行分析和设计。
在这个过程中,我们运用MATLAB软件作为主要的仿真工具,对控制系统的稳定性、动态响应、鲁棒性等方面进行了全面的仿真分析。
在完成理论分析和实际设计之后,我们进一步研究了基于MATLAB 的控制系统仿真方法。
通过对仿真模型的建立、仿真参数的选择以及仿真结果的分析,我们提出了一种高效的仿真策略。
我们将所设计的控制系统应用于实际场景中,通过实验数据验证了所提出方案的有效性和可行性。
本论文通过理论与实践相结合的方法,深入探讨了基于MATLAB 控制系统的仿真与应用。
基于Matlab的嵌入式系统控制算法设计及应用

基于Matlab的嵌入式系统控制算法设计及应用一、引言随着科技的不断发展,嵌入式系统在各个领域得到了广泛的应用,其控制算法设计对系统性能和稳定性起着至关重要的作用。
Matlab作为一种功能强大的工程计算软件,被广泛应用于嵌入式系统的控制算法设计与仿真。
本文将重点介绍基于Matlab的嵌入式系统控制算法设计及其在实际应用中的具体案例。
二、Matlab在嵌入式系统控制算法设计中的优势Matlab具有丰富的工具箱和函数库,可以方便地进行信号处理、系统建模、控制算法设计等工作。
在嵌入式系统控制算法设计中,Matlab提供了各种强大的工具和函数,如Simulink仿真环境、Control System Toolbox等,可以帮助工程师快速高效地设计和验证控制算法。
三、嵌入式系统控制算法设计流程系统建模:首先需要对待控制的嵌入式系统进行建模,包括系统的输入输出关系、传递函数等。
控制算法设计:根据系统模型,设计合适的控制算法,常见的包括PID控制器、模糊控制、神经网络控制等。
仿真验证:利用Matlab中的Simulink进行仿真验证,检验设计的控制算法在不同工况下的性能表现。
代码生成:将设计好的控制算法代码生成到目标硬件平台上,实现对嵌入式系统的实时控制。
四、基于Matlab的嵌入式系统控制算法应用案例1. 温度控制系统以温度控制系统为例,通过Matlab建立温度传感器与加热器之间的数学模型,并设计PID控制器来实现温度稳定在设定值附近。
通过仿真验证和实际测试,证明了基于Matlab的控制算法在温度控制领域的有效性。
2. 无人机飞行控制针对无人机飞行控制这一复杂系统,利用Matlab中的飞行动力学工具箱和自动驾驶工具箱,设计出高效稳定的飞行控制算法。
通过实地测试和飞行验证,证明了基于Matlab的嵌入式系统控制算法在无人机领域的广泛应用前景。
五、结语基于Matlab的嵌入式系统控制算法设计及应用是当前工程领域一个备受关注的研究方向。
Matlab在嵌入式系统设计中的应用技巧
Matlab在嵌入式系统设计中的应用技巧嵌入式系统设计是利用计算机技术和软硬件结合的方法来开发和构建各种嵌入式设备的过程。
在当今日益发展的科技领域中,嵌入式系统已经成为了人们日常生活中不可或缺的一部分。
而Matlab作为一种高级技术工具,不仅适用于科学计算和数据分析,而且在嵌入式系统设计中也有着重要的应用。
本文将探讨Matlab在嵌入式系统设计中的应用技巧,并提供一些有关该领域的实用建议。
一、Matlab在嵌入式系统设计中的基础知识在深入讨论Matlab在嵌入式系统设计中的应用技巧之前,我们先来了解一些基础知识。
首先,Matlab是一种矩阵计算和编程语言,具有强大的数学和工程计算功能。
其次,嵌入式系统设计涉及到硬件和软件的结合,因此对于嵌入式设备的控制和数据处理具有重要的意义。
对于嵌入式系统设计而言,Matlab提供了各种工具箱和函数,以便用户能够进行系统模拟、算法设计和性能分析等操作。
二、Matlab在嵌入式系统设计中的仿真与验证在嵌入式系统设计中,仿真和验证是一个重要的环节。
Matlab提供了各种工具和资源,可以方便地进行系统建模、仿真和验证。
用户可以利用Matlab的Simulink工具箱,快速构建系统模型,并通过仿真来验证系统的功能和性能。
此外,Matlab还提供了实时工作坊(Real-Time Workshop)工具箱,可用于将模型代码转换为运行于嵌入式设备的C代码。
通过仿真和验证,开发人员可以在设计阶段发现并解决各种问题,从而提高嵌入式系统的质量和可靠性。
三、Matlab在嵌入式系统算法设计中的应用算法是嵌入式系统设计中的重要组成部分。
Matlab提供了丰富的数学和信号处理函数,可用于设计和实现各种嵌入式系统中的算法。
例如,Matlab提供了数字信号处理工具箱,可用于处理实时信号和图像数据。
此外,Matlab还提供了各种优化算法库,可用于解决嵌入式系统中的优化问题。
通过合理利用Matlab提供的算法设计工具,开发人员可以更加高效地完成算法设计和实现的任务。
simulink生成C代码
MATLAB控制系统仿真与嵌入式系统算法设计(原创)2009-01-2213:25:25|分类:嵌入式系统与MATL|字号订阅摘要:在控制类产品设计中,从仿真到工程实现一直是工程师追求的目标,本文将用几个实列来讨论这一过程,因为相当一部分工程师对单片机系统、Keil比较熟练,因此我采用对项目Simulink建模仿真后,就如何生成C代码,然后配合Keil 环境,从而以很小的工作代价把一些复杂的算法集成到单片机系统或嵌入式系统里运行,例子中包含有查询表、信号处理、模糊控制、神经网络、PID控制算法等。
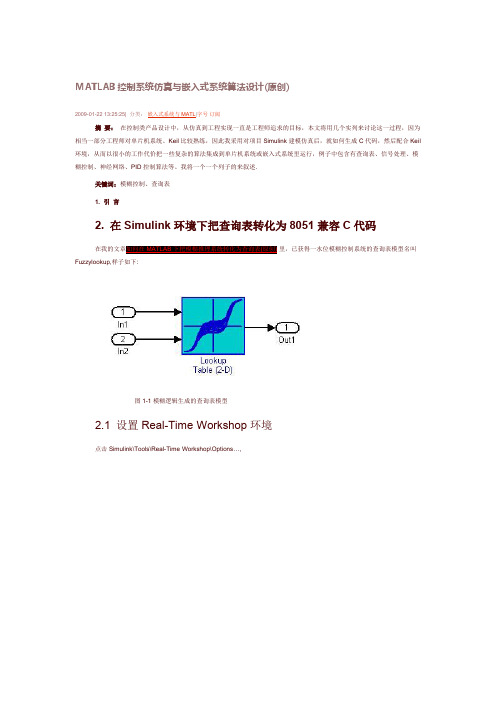
我将一个一个列子的来叙述.关键词:模糊控制、查询表1.引言2.在Simulink环境下把查询表转化为8051兼容C代码在我的文章如何在MATLAB下把模糊推理系统转化为查询表(原创)里,已获得一水位模糊控制系统的查询表模型名叫Fuzzylookup,样子如下:图1-1模糊逻辑生成的查询表模型2.1设置Real-Time Workshop环境点击Simulink\Tools\Real-Time Workshop\Options…,图1-2Real-Time Workshop设置1在上图的设置窗中,选择Real-Time Workshop项按上图设置,设置好后,选择Hardware Implement…,设置如下,点击Apply。
图1-3Real-Time Workshop设置2选择Solver项,设置如下,点击Apply。
图1-4Real-Time Workshop设置31.2生成8051兼容C代码并查看生成报告点击Simulink\Tools\Real-Time Workshop\Build Model…,过几秒后,看到代码生成报告如下样子的界面:图1-5Real-Time Workshop代码生成报告1.3把生成8051兼容C代码放入Keil环境里编译成51可执行的代码在Keil下创建一个项目,命名为LookupTable.Uv2,把上一步生成的所有代码文件拷贝到与LookupTable.Uv2同一个目录下,这个例子中需要把rtlibsrc.h从MATLAB安装目录下搜查出来也考到这个目录下,然后在Keil环境内,打开LookupTable.Uv2项目,把以上文件全部添加到Source Group1内,样子如下:图1-6Real-Time Workshop生成的代码导入Keil里1.4稍修改生成的51代码和设置Keil环境为编译做准备.修改代码和设置Keil环境的目的是让Keil能顺利编译文件,并能运行程序做测试,下面是代码修改的几个地方。
matlab控制系统仿真设计
matlab控制系统仿真设计Matlab控制系统仿真设计控制系统是现代工业领域中的关键技术之一,用于实现对系统行为的预测和调节。
在控制系统设计中,仿真是一个重要的工具,可以帮助工程师和研究人员理解和评估系统的性能。
在本文中,我们将以Matlab的控制系统仿真设计为主题,介绍控制系统仿真的基本概念、方法和工具。
一、控制系统仿真基础1.1 什么是控制系统仿真?控制系统仿真是指通过计算机模拟系统的动态行为来评估和验证控制策略的一种方法。
仿真可以帮助工程师在构建实际系统之前,通过计算机模型对系统的运行过程进行预测和分析。
1.2 为什么要进行控制系统仿真?控制系统仿真可以帮助工程师在实际系统建造之前对系统进行评估和优化。
它可以提供系统的动态响应、稳定性、鲁棒性等信息,帮助工程师优化控制策略和设计参数。
此外,仿真还可以帮助工程师调试和验证控制算法,减少实际系统建造和测试的成本和风险。
1.3 Matlab在控制系统仿真中的作用Matlab是一款功能强大的科学计算软件,也是控制系统仿真的重要工具之一。
Matlab提供了丰富的控制系统设计和分析工具箱,使得控制系统仿真变得更加简单和高效。
二、Matlab控制系统仿真设计的步骤2.1 确定系统模型在进行控制系统仿真设计之前,首先需要确定系统的数学模型。
系统模型可以通过物理原理、实验数据或系统辨识方法得到。
在Matlab中,可以使用符号计算工具箱或数值计算工具箱来建立系统的数学模型。
2.2 设计控制器根据系统模型和性能要求,设计合适的控制器。
常用的控制器设计方法包括PID控制、根轨迹设计、频率响应设计等。
在Matlab中,可以使用Control System Toolbox来设计控制器,并进行性能分析和优化。
2.3 仿真系统响应利用Matlab的仿真工具,对系统进行动态仿真,观察系统的响应。
仿真可以根据预先设定的输入信号和初始条件,计算系统的状态和输出变量随时间的变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MATLAB控制系统仿真与嵌入式系统算法设计(原创)
2009-01-22 13:25:25| 分类:嵌入式系统与MATL|字号订阅
摘要:在控制类产品设计中,从仿真到工程实现一直是工程师追求的目标,本文将用几个实列来讨论这一过程,因为相当一部分工程师对单片机系统、Keil比较熟练,因此我采用对项目Simulink建模仿真后,就如何生成C代码,然后配合Keil 环境,从而以很小的工作代价把一些复杂的算法集成到单片机系统或嵌入式系统里运行,例子中包含有查询表、信号处理、模糊控制、神经网络、PID控制算法等。
我将一个一个列子的来叙述.
关键词:模糊控制、查询表
1. 引言
2. 在Simulink环境下把查询表转化为8051兼容C代码
在我的文章如何在MATLAB下把模糊推理系统转化为查询表(原创) 里,已获得一水位模糊控制系统的查询表模型名叫Fuzzylookup,样子如下:
图1-1模糊逻辑生成的查询表模型
2.1 设置Real-Time Workshop环境
点击Simulink\Tools\Real-Time Workshop\Options…,
图1-2 Real-Time Workshop 设置1
在上图的设置窗中,选择Real-Time Workshop项按上图设置,设置好后,选择Hardware Implement…,设置如下,点击Apply。
图1-3 Real-Time Workshop 设置2
选择Solver项,设置如下,点击Apply。
图1-4 Real-Time Workshop 设置3
1.2 生成8051兼容C代码并查看生成报告
点击Simulink\Tools\Real-Time Workshop\Build Model…,过几秒后,看到代码生成报告如下样子的界面:
图1-5 Real-Time Workshop 代码生成报告
1.3 把生成8051兼容C代码放入Keil环境里编译成51可执行的代码
在Keil下创建一个项目,命名为2,把上一步生成的所有代码文件拷贝到与2同一个目录下,这个例子中需要把rtlibsrc.h 从MATLAB安装目录下搜查出来也考到这个目录下,然后在Keil环境内,打开2项目,把以上文件全部添加到Source Group1内,样子如下:
图1-6 Real-Time Workshop生成的代码导入Keil里
1.4 稍修改生成的51代码和设置Keil环境为编译做准备.
修改代码和设置Keil环境的目的是让Keil能顺利编译文件,并能运行程序做测试,下面是代码修改的几个地方。
1.ert_main.c 内的主函数修改成如下样子:
图1-7 修改后的main()
2. ert_main.c 内的rt_OneStep()修改成如下样子:
图1-8 修改后的rt_OneStep()
3.修改Fuzzylookup.c里的fuzzylookup_step函数,程序里增添了两行代码:
fuzzylookup_U.In1=-0.92;
fuzzylookup_U.In2=-0.06;
模拟传感器器送入的信号,用于测试是否程序执行后是否查询表输出值是正确的,样子如下:
图1-9 修改后的fuzzylookup_step(void)
4.keil环境设置,因为查询表格的尺寸较大,所以单片机存储器模式设置成下面的样子,Memory Model:Large:variables in XDATA。
图1-10单片机存储模式设置
5.编译项目,编译后可以看到项目占用的资源情况,这里暂时不考虑代码优化问题。
图1-11 Keil编译结果6.执行程序测试。
图1-12 程序运行测试结果
7. 结论
以上的步骤就完成了一个MATALB下查询表转化为8051处理器可执行的代码.
SIMULINK里做嵌入式设计的流程(小结)
Simulink与嵌入式代码自动化生成
终于可以在实物上实践了各种控制算法了使用图像识别技术的水位模糊控制装置1(构思)。