ABAQUS接触例题
ABAQUS应用培训-09 接触分析及实例
15
2015/7/5
15
4
2015/7/5
4
接触 –利用接触模块定义并管理以下信息:
– 模型区域之间或模型区域同它周围模型之间的机械和热接触。
机械接触 一般和双面接触 自接触 弹性基础 激励器/传感器
其它接触 (约束) 捆绑约束 刚体 显示体 耦合 壳到实体耦合 嵌入区域 线性多点约束方程
热接触 热膜条件 对环境的辐射 热接触
1
4
5
2 7
3 10
6 11
8
9
12
3
接触操作(Interaction)
Interaction
1. 不同的接触算法:standard explicit 2. 作为一种边界条件,接触定义在不同的step中可以发生变化 3. 接触算法还分为Kinematic, Penalty,初学者不用选择 4. Surface to Surface, Surface to node 5. 主面(master, first)和从面(slace,second) 6. 接触体之间的相互作用:摩擦和热传递等设置 7. 接触面的间隙调整
k14 k24 k34 k44 k54 k64 0 0 0 0 0 0
0 0 k35 k45 k55 k65 0 0 0 0 0 0
0 0 k36 k 46 k56 k66 0 0 0 0
k116 0
0 0 0 0 0 0 k77 k87 k97 k107 0 0
0 0 0 0 0 0 k78 k88 k98 k108 0 0
有限元分析-ABAQUS的应用
接触分析
方 刚
2015年7月
2015/7/5
1
1
接触
• “为什么要定义机械接触?
lecture6-cAbaqusStandard中的接触问题

Introduction to Abaqus/Standard and Abaqus/Explicit
© Dassault Systèmes, 2008
在严格的Master/Slave定义中要考虑网格密度
ห้องสมุดไป่ตู้
CONTACT PAIR (ASURF,BSURF) NODE 167 IS NOW SLIPPING. CONTACT PAIR (ASURF,BSURF) NODE 171 IS NOW SLIPPING. : : : :
从节点滑移;如果应用Lagrange 摩擦或发生滑移反转,将产生 SDIs。
L6.14
在 Abaqus/Standard中CONTACT规则
• Message文件, Step 3, Increment 6 (cont'd):
CONVERGENCE CHECKS FOR SEVERE DISCONTINUITY ITERATION 1
MAX. PENETRATION ERROR -8.16193E-009 AT NODE 331 OF CONTACT PAIR (ESURF,FSURF) MAX. CONTACT FORCE ERROR -4369.44 AT NODE 363 OF CONTACT PAIR (CSURF,DSURF)
• 状态 (.sta) 文件:
SUMMARY OF JOB INFORMATION: MONITOR NODE: 200 DOF: 2 STEP INC ATT SEVERE EQUIL TOTAL DISCON ITERS ITERS ITERS 1 1 1 1 1 2 2 1 1 0 1 1 3 1 1 10 0 10 3 2 1 7 1 8 3 3 1U 10 0 10 3 3 2 5 0 5 3 4 1 3 1 4 3 5 1 2 3 5 3 6 1 4 1 5 3 7 1 4 1 5 3 8 1 6 1 7 3 9 1U 8 0 8 3 9 2 4 3 7 3 10 1 2 3 5 3 11 1 4 2 6 . . . TOTAL TIME/ FREQ 1.00 2.00 2.01 2.02 2.02 2.02 2.03 2.04 2.05 2.07 2.10 2.10 2.11 2.12 2.15 STEP TIME/LPF 1.00 1.00 0.0100 0.0200 0.0200 0.0238 0.0294 0.0378 0.0505 0.0695 0.0979 0.0979 0.109 0.125 0.149 INC OF TIME/LPF 1.000 1.000 0.01000 0.01000 0.01500 0.003750 0.005625 0.008438 0.01266 0.01898 0.02848 0.04271 0.01068 0.01602 0.02403 DOF IF MONITOR RIKS 0.000 0.000 -0.000600 -0.00120 -0.00120 -0.00142 -0.00176 -0.00227 -0.00303 -0.00417 -0.00588 -0.00588 -0.00652 -0.00748 -0.00892
abaqus接触问题分析
abaqus接触分析1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的sl ave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQU S会认为两个面没有接触:*Contact Pair, interac tion="SOIL PILE SIDE CONTACT", small sliding,adjust=0.2.4、定义tie时也应该设定类似的posit ion toleran ce:*Tie, name=ShaftBo ttom, adjust=yes, positio n toleran ce=0.15、msg文件中出现zeropivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了t ie,又定义了con tact, 出现过约束。
解决方法是在选择tie或c ontact的slave surface时,将类型设为no de region,然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在ini tial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
ABAQUS接触分析
ABAQUS接触分析1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的slave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction='SOIL PILE SIDE CONTACT', small sliding, adjust=0.2.4、定义tie时也应该设定类似的position tolerance: *Tie, name=ShaftBottom, adjust=yes, position tolerance=0.15、msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。
解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。
abaqus 接触问题
1.1点对面离散与面对面离散【常见问题1-1】在ABAQUS/Standard分析中定义接触时,可以选择点对面离散方法(node-to-surface-dis-cre-tization)和面对面离散方法(surface-to-surface discretization),二者有何差别?『解答』在点对面离散方法中,从面(slave surface)上的每个节点与该节点在主面(master surface)上的投影点建立接触关系,每个接触条件都包含一个从面节点和它的投影点附近的一组主面节点。
使用点对面离散方法时,从面节点不会穿透(penetrate)主面,但是主面节点可以穿透从面。
面对面离散方法会为整个从面(而不是单个节点)建立接触条件,在接触分析过程中同时考虑主面和从面的形状变化。
可能在某些节点上出现穿透现象,但是穿透的程度不会很严重。
在如图l和图2所示的实例中,比较了两种情况。
1)从面网格比主面网格细:点对面离散(图16-1a)和面对面离散(图16-2a)的分析结果都很好,没有发生穿透,从面和主面都发生了正常的变形。
2)从面网格比主面网格粗:点对面离散(图16-1b)的分析结果很差,主面节点进入了从面,穿透现象很严重,从面和主面的变形都不正常;面对面离散(图16-2b)的分析结果相对较好,尽管有轻微的穿透现象,从面和主面的变形仍比较正常。
从上面的例子可以看出,在为接触面划分网格时需要慎重,无论使用点对面离散还是面对面离散,都应尽量保证从面网格不能比主面网格粗。
关于从面和主面的选择方法,请参见《实例详解》第5.2.2节“定义接触对”。
选用离散方法时,还应考虑以下因素。
1)一般情况下,面对面离散得到的应力和压强的结果精度要高于点对面离散。
2)面对面离散需要分析整个接触面上的接触行为,其计算代价要高于点对面离散。
一般情况下,二者的计算代价相差不是很悬殊,但在以下情况中,面对面离散的计算代价将会大很多:①模型中的大部分区域都涉及到接触问题。
【2017年整理】Abaqus Explicit 接触问题
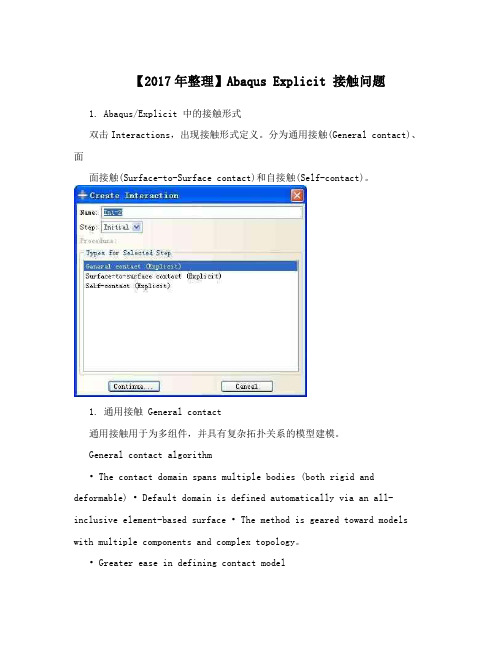
【2017年整理】Abaqus Explicit 接触问题1. Abaqus/Explicit 中的接触形式双击Interactions,出现接触形式定义。
分为通用接触(General contact)、面面接触(Surface-to-Surface contact)和自接触(Self-contact)。
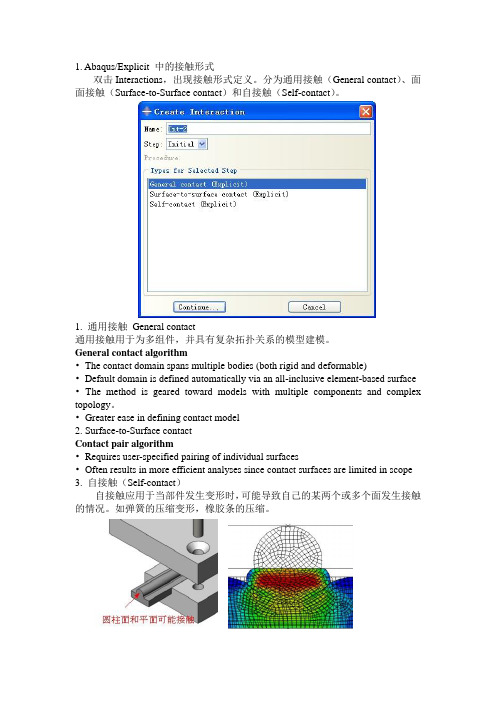
1. 通用接触 General contact通用接触用于为多组件,并具有复杂拓扑关系的模型建模。
General contact algorithm• The contact d omain spans multiple bodies (both rigid and deformable) • Default domain is defined automatically via an all-inclusive element-based surface • The method is geared toward models with multiple components and complex topology。
• Greater ease in defining con tact model2. Surface-to-Surface contactContact pair algorithm• Requires user-specified pairing of individual surfaces• Often results in more efficient analyses since contact surfaces are limited in scope3. 自接触(Self-contact)自接触应用于当部件发生变形时,可能导致自己的某两个或多个面发生接触的情况。
如弹簧的压缩变形,橡胶条的压缩。
• 容易使用• “自动接触”• 节省生成模型的时间• 通用接触算法一般比双面接触算法快机械约束形式• 运动依从 Kinematic contact method (只有接触对形式可用,General contact不可用)默认的运动接触公式达到的计算精度与接触条件相一致。
Abaqus-Explicit-接触问题
1. Abaqus/Explicit 中的接触形式双击Interactions,出现接触形式定义。
分为通用接触(General contact)、面面接触(Surface-to-Surface contact)和自接触(Self-contact)。
1. 通用接触General contact通用接触用于为多组件,并具有复杂拓扑关系的模型建模。
General contact algorithm•The contact domain spans multiple bodies (both rigid and deformable)•Default domain is defined automatically via an all-inclusive element-based surface •The method is geared toward models with multiple components and complex topology。
•Greater ease in defining contact model2. Surface-to-Surface contactContact pair algorithm•Requires user-specified pairing of individual surfaces•Often results in more efficient analyses since contact surfaces are limited in scope 3. 自接触(Self-contact)自接触应用于当部件发生变形时,可能导致自己的某两个或多个面发生接触的情况。
如弹簧的压缩变形,橡胶条的压缩。
•容易使用•“自动接触”•节省生成模型的时间•通用接触算法一般比双面接触算法快机械约束形式•运动依从Kinematic contact method(只有接触对形式可用,General contact不可用)默认的运动接触公式达到的计算精度与接触条件相一致。
ABAQUS 接触Microsoft Word 文档 (2)

abaqus接触分析【引】2010-06-03 19:431、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的slave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding, adjust=0.2.4、定义tie时也应该设定类似的position tolerance:*Tie, name=ShaftBottom, adjust=yes, position tolerance=0.15、 msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。
解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL 来增大允许的迭代次数。