火星姿轨控系统设计
动能拦截器姿控与轨控方案设计及仿真
姿 控 发 动 机工 作 时 , 弹 体坐 标 系 内的力 矩 分 在
量为
( 一 F ‘r M
_ 《 一F・ 【 M
一
( 3 )
F .
式 中 , 表示姿 控 发动 机作用 点 到动能拦 截器质 心
Hale Waihona Puke 图 3 间隔 脉 冲工 作 方 式
距 离 , 表 示 姿 控 发 动 机 轴 线 与 动 能 拦截 器 纵 轴距 r
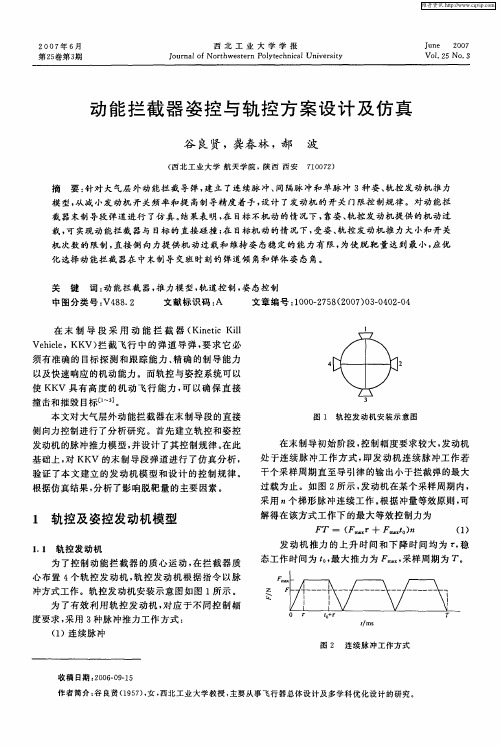
图 1 轨 控 发 动 机 安 装 示 意 图
发动机 的脉冲推力 模 型 , 并设计 了其 控制 规律 。 在此 基 础上 , KKV 的末 制 导段 弹道进 行 了仿 真分 析 , 对
验证 了本 文建立 的 发 动机模 型和 设计 的控 制规 律 。
在末 制导 初始 阶段 , 控制 幅度要 求较 大 , 发动机
模型 , 减 小发 动机 开关频 率和提 高制导精度 着 手 , 从 设计 了发 动机 的开 关 门限控 制规 律 。对动 能拦
截 器末制导段 弹道进 行 了仿 真 。 结果表 明 , 目标 不机动 的情 况下 , 在 靠姿 、 轨控 发动机 提供 的机动过
载 , 实现动 能拦截 器与 目标 的直接碰 撞 ; 目标机 动 的情 况下 , 可 在 受姿 、 控发 动机推 力 大小和 开关 轨
处 于连 续脉 冲 工 作方 式 , 发 动机 连 续脉 冲工 作若 即
干个 采样 周期 直至 导引 律 的输 出小 于拦截 弹的最 大 过载 为止 。如 图 2 示 , 所 发动机 在某 个采样 周期 内 , 采用 个梯 形脉 冲连续 工作 。 据 冲量等效原则 , 根 可
根据仿真 结果 , 析 了影 响脱 靶量 的 主要 因素 。 分
第10章航天器姿态与轨道控制分系统(1)
3. 航天器轨道控制系统
3.2 航天器的轨道机动与轨道保持
航天器在控制系统作用下使其轨道发生有 意的改变称为轨道机动。轨道机动方式一 般有两种: 无线电指令控制系统或称遥控系统; 惯性控制系统。 变轨控制分为轨道改变和轨道转移。 轨道保持是对在轨航天器受到外界干扰的 作用下偏离预定轨道的修正。
8
1. 航天器控制的基本概念
1.6 姿态控制与轨道控制的关系
航天器是一个比较复杂的控制对象,一般来说轨道控制与姿态控制密切 相关。为实现轨道控制,航天器姿态必须符合要求。即当需要对航天器 进行轨道控制时,同时也要求进行姿态控制。在某些具体情况或某些飞 行过程中,可以把姿态控制和轨道控制分开来考虑。有些应用任务对轨 道没有严格要求,如空间环境探测卫星,则只有姿态控制系统。
3
1. 航天器控制的基本概念
1.2.航天器的控制
航天器在轨道上运动将受到各种力矩的作用。从刚体力学的角度来 说,力使航天器的轨道产生摄动,力矩使航天器姿态产生扰动。 航天器的控制可以分为两大类:轨道控制和姿态控制。 1.对航天器的质心施加外力,以有目的地改变其运动轨迹的技术, 称为轨道控制。 2.对航天器绕质心施加力矩,以保持或按需要改变其在空间的定向 技术,称为姿态控制。
11
1. 航天器控制的基本概念
星上自主控制框图 星—地大回路控制框图
轨道运动
星载控制器
执行机构
星体姿态和轨道动力学
姿态运动
卫星动力学
⊗
给定
敏 感 器
姿态轨道 控制器
敏感器
执 行 机 构
跟踪
遥测
遥控
跟踪
遥测
遥控
数据处理 测定轨道
控制参数 计算
12
火星探测器的轨道设计与控制
火星探测器的轨道设计与控制一、前言自人类进入太空时代以来,探测火星一直是许多国家和科技机构努力的方向。
相比于地球,火星的环境和气候非常恶劣,人类难以生存,因此探测火星的方式多依赖于无人自主探测器。
而如何设计和控制这些探测器的轨道,成为了保障探测器顺利工作的首要问题。
二、火星探测器轨道设计火星探测器的轨道设计是一个非常重要且复杂的问题。
首先要明确的是,探测器轨道设计需要考虑多种因素,其中最重要的是地球和火星的位置和距离、火星表面的地形和地貌、太阳风的影响等。
因此,轨道设计需要紧密结合探测任务的具体要求,充分考虑上述因素的影响。
1. 靶点的选择轨道设计的第一步是选择好探测器的着陆点,或者称之为靶点。
靶点的选择需要考虑地形地貌、环境条件、资源和科学研究价值等多方面因素。
比如,探测火星极地可能会获取到关于火星历史气候变化的价值数据,而选取陨石撞击坑可能会揭示火星的地质历史,影响着陆点的选择还有探测器的能源来源,比如太阳能电池板需要大面积的开阔地带。
2. 轨道类型的选择火星探测器的轨道类型可以分为椭圆轨道、偏心轨道、圆锥体轨道等多种类型。
在考虑轨道类型时,需要根据探测器的任务要求,比如对于能量稳定的科学试验,可以选择椭圆轨道,这种轨道具有稳定的轨道周期和能量,适合长时间观测;对于着陆任务来说,需要选择与火星表面相交的过渡轨道,使得着陆器能够逐渐减速,并适应急剧变化的火星大气,不至于摔毁。
3. 飞行器设备性能的要求轨道设计需要同时考虑飞行器的固有特性,比如其自身质量、推进系统、导航系统、电子设备等,这些因素都会影响探测器的轨道设计。
比如,推进系统的推进力和工作时间,电子设备的重量和能耗等都会对轨道设计产生不同程度的影响。
三、火星探测器轨道控制制定好火星探测器的轨道仅仅是探测任务的一个起点。
为了保障探测器顺利工作,良好的轨道控制也同样十分关键。
探测器的轨道控制需要实时监测和分析探测器的运行状态和位置,随时进行微小的调整。
航天器姿态与轨道控制原理

航天器姿态与轨道控制原理
从系统建模的角度来看,航天器的姿态与轨道控制原理包括两部分:旋转系统和平衡系统。
旋转系统包括控制方法、动力方法、传感方法和反馈控制方法等,来实现航天器姿态控制。
平衡系统则运用轨道力学、轨道建模、轨道规划以及发动机控制等方法,以轨道航行、轨道改良等为目标,保证航天器完成任务。
通常情况下,旋转系统使用发动机以及由发动机带动的旋转机构来控制和调节航天器构型和姿态。
旋转系统的主要控制方式有:有限旋转系统控制、控制反馈系统控制、面向目标的制导控制和旋转目标控制等,结合传感器系统通过利用陀螺仪、角速度矢量积分等方法,对航天器角度、转矩控制进行调节,使最终姿态稳定。
平衡系统使用发动机以及由发动机带动的旋转机构来推进航天器的空间轨道控制,通过改变发动机输出力及轨道建模下的参数,如卫星质量、平衡系数等,来调节航天器轨道,如通过线加速、混乱改正、超密对抗等方式,来实现轨道的航行控制。
总之,航天器姿态与轨道控制原理是结合发动机控制技术与建模技术,将航天器位置、朝向以及运动控制起来,以实现宇宙任务的一系列原理。
载人火星探测任务轨道和总体方案

01
探测活动
在火星表面进行地质调查、环境 分析、采样等探测活动,获取有 关火星的详细信息。
返回准备
02
03
火星返回
建造和测试返回舱,准备返回地 球的航天器、推进剂等。
通过火星起飞、再入大气层等操 作,将航天员和样品安全送回地 球。
THANKS
感谢观看
火星返回方案
样品采集
在火星表面采集具有科学研究价值的岩石和土 壤样本。
样品封装
将采集的样品进行封装,以保护其不受污染和 损失。
返回舱设计
设计和制造一个能够承载样品并安全返回地球的返回舱。
04
关键技术挑战及解决策 略
推进技术
火箭技术
为了将载人飞船送至火星,需要使用具有强大推力的火箭,确保 飞船能够成功脱离地球引力。
热防护
使用隔热材料和热防护涂层,防止高速摩擦产生的高 温对探测器造成损坏。
着陆过程
在接近地面时,通过反推发动机和缓冲机构实现平稳 着陆。
火星表面移动方案
火星车
配备有轮子和独立悬挂系统,能够在火星表 面进行移动和越障。
遥控机械臂
用于抓取和操作火星表面的岩石和土壤样本 。
探测机器人
能够在危险或未知环境下进行探测和采样。
推进器技术
为了实现飞船在火星表面的移动和姿态调整,需要使用高效的推 进器,如离子推进器和涡轮发动机。
燃料储存技术
为了确保飞船的长时间航行,需要研发高效、安全的燃料储存技 术,如液氢和液氧储存技术。
热控技术
温度控制技术
由于火星环境极端寒冷,需要确保飞船能够 保持适宜的温度,因此需要研发高效的温度 控制技术。
自主导航算法
为了实现飞船的自主导 航,需要研发高效的自 主导航算法,以实现飞 船对火星表面的精确着 陆。
航天器轨道控制系统设计与优化

航天器轨道控制系统设计与优化航天器轨道控制系统是航天发射和操作中最关键的一部分。
它是通过控制航天器运动轨迹和速度实现精确定位和轨道维护的关键。
航天器轨道控制系统设计的目标是实现长期稳定的轨道维护、提高航天器的使用寿命、改善活动质量和安全性能等方面的需求。
1. 航天器轨道控制系统基本原理航天器轨道控制系统主要由六个方面的控制构成:发射控制、轨道跟踪、精确轨道控制、空间导航、卫星遥测遥控以及卫星地面测控系统。
其中,发射控制是整个轨道控制的第一步,是实现卫星进入预定轨道的前提。
轨道跟踪的主要工作是实现航天器在轨道运行过程中位置、速度、姿态、轨道参数等的测量。
精确轨道控制是指根据测量的轨道参数、采用某种控制方式,对航天器进行调整和控制,使其达到预期目标。
空间导航主要是通过地球大气层以外空间中各种自然规律与天体定向等技术手段,实现对航天器的导航定位,这是精确控制的前提和基础。
遥测遥控和卫星地面测控系统主要是通过卫星与地面轨道测控系统之间的通信传输和数据处理,实现对航天器运行状态的监测、控制和维护。
2. 轨道控制系统设计的难点复杂的任务环境是航天器轨道控制系统设计的一个难点。
航天器工作环境的复杂性导致轨道控制系统需要面对多重难点,如控制力的变化、温度的变化、能量的供应和消耗、高空环境的辐射和热量影响、机械结构的振动和噪声干扰等。
另一个难点是提高控制的精度和稳定性。
由于航天器轨道控制系统所处的高空环境的高度、速度和工作温度等因素,不同于地面等场所,因此需要采用一些先进的控制算法和信号处理技术,确保控制精度的有效实现。
3. 轨道控制系统的设计与优化在设计和优化轨道控制系统时,需要依据工作环境的特点合理选用设计方案和算法。
这可能包括一整套系统的模型与仿真,以及算法解析和调试。
为了提高控制的精度和稳定性,通常采用场计算算法、最优化算法、模糊控制算法和遗传算法等技术,来实现对航天器的有效控制,在高速运动和复杂环境中实现更强大的控制精度和稳定性。
卫星姿轨控半物理仿真测试系统
0 引 言
控制分系统负责卫星变轨控制的实现,是卫星各分系统中 控制难度较大的一个分系统[1],如果该系统出现故障将直接 导 致卫星不能完成既定任务,甚至使其变成一个空间垃圾[2]。 卫 星在研制不同阶段对姿轨控的设计任务和试验验证任务要求不 同,因此地面仿真测时地面测试系统也应满足卫星不同阶段仿 真试验任务,使得能在卫星研制的不同阶段进行充分的仿真测 试验证以保证卫星在轨任务的成功。半物理仿真试验使用真实 的控制电路和星载姿轨控计算机软硬件、真实的敏感器及其接 口电路,用卫星 动 力 学 和 执 行 机 构 数 学 仿 真 软 件 驱 动 机 械 转 台,模拟卫星的姿态和轨道运动。为了保证某型号卫星姿轨控 分系统 (GNC) 顺利完 成 总 体 试 验 大 纲 规 定 的 开 环 测 试、 闭 环测试以及半物理仿真试验等功能,自动化测试是研制卫星姿 轨控分系统的重要手段[3],姿轨控分系统的半物理测试主要 是 实现系统的开闭环测试以及接口对接测试,除了半物理测试外
测试与故障诊断
计 算 机 测 量 与 控 制 .2017.25(11) 犆狅犿狆狌狋犲狉 犕犲犪狊狌狉犲犿犲狀狋 牔 犆狅狀狋狉狅犾
· 1 ·
文章编号:1671 4598(2017)11 0001 03 DOI:10.16526/j.cnki.11-4762/tp.2017.11.001 中图分类号:TP273 文献标识码:A
关键词:半物理仿真;通用性;高精度;星地联试
犚犲狊犲犪狉犮犺狅狀犛犪狋犲犾犾犻狋犲犃犗犆犛犛犲犿犻-犜犲狊狋犛犻犿狌犾犪狋犻狅狀犜犲狊狋犛狔狊狋犲犿
ZhangYiwen,LiuZhao,Chen Hang
(ShanghaiInstituteofSpaceflightControlTechnology,Shanghai 201109,China) 犃犫狊狋狉犪犮狋:InordertokeepthesatelliteAOCS (AttitudeTrajectoryControlSystem)semi-physicaltestsmoothly,thegroundtesting systemofAOCSsemi-physicalsimulationwasdesigned.Inordertomeettheuniversaltestofsimilarsatellitemodels,thesimulationtest systemadoptsageneralmodulardesighframework,.Asthesametime,thecurrentmainstreamPXIbustestingtechnologyisadoptedcoop eratingwithVPCswitchingcircuitboard.Thefunctionofeach moduleisrealizedbyusingstandardcPCIbuscardandsomehome-made FPGAprogrammablecPCIbuscard.Thisarchitecturecannotonlyrealizethefunction modularization,butalsofacilitatethesubsequent functionexpansionand maintenance. Meanwhile,theutility modelhastheadvantagesofhighreliability,fastconstructiontimeandstrong maintainability,andhastheadvantagesofsmallsizeandstrongstability,andcanbeadaptedtotestenvironmentconditionsofdifferenttest objects,andissuitableforlong-distancetransportation.Thispaperintroducestheoveralldesignstructureofthesystem,theoverallpow ersimulation,dynamicsimulator,electricalsourceinterface,programmingloadapplicationinterface,peripheralequipmentandotherhard warewereintroducedrespectively.Thetestsystemhasbeenverifiedbysatelliteandgroundtest.Thefunctionandusabilityofthetestsys tem havebeenverified.Thetestresultaccordswiththeconceptionofdesignfunctionandgeneralizationatthebeginningofthedesign. 犓犲狔狑狅狉犱狊:semi-simulation;universality;highprecision;satelliteandgroundjointtest
基于RTX的卫星姿轨控系统地面实时仿真系统
a tt e a r tc nto a e n RTX tiud nd o bi o r lb s d o
Байду номын сангаас
X A H n —w iLN n I o g e,I G Mig—x n ,E G Qn i g Z N ig—sun , I i a a h ag X EWe —nn
c nr li h r c s f a el e d v lp n .C n i ee er a o to nt ep o e so tl t e e o i g o sd r d t e l—t e i so esmua in s se o h ru d s i h i d sr f h i lt y tm n t e go n me e t o o tl t o to .t e d sg n e l t f t e r a f r ael e c n r 1 h e in a d r aiai n o h e —t i l t n s se a e d s u s d E p rme t r s i z o l i smu ai y t m r ic s e . x e me o i nsae p r r d a d t e rs l h w ta tr n n h g e l i e o a c ef me n h e ut s o h ti u si ih r a —t o s me p r r n e,wo k t a i n e ib y T i p p r fm r s se d l a d r l l . hs a e y a h s s me r fr n e v l e n u d n a i g rsmua in s se h c a t c r a —t e i . a o e ee c a u sa d g ii g me n n s f i lt y t ms w i h h ssr t e l i d sr o o i me e
卫星姿轨控系统设计与分析平台软件方案及实现
74空间电子技术SPACE ELECTRONIC TECHNOLOGY2016年第2期卫星姿轨控系统设计与分析平台软件方案及实现①刘其睿1 ’2,王新民1 ’2,刘洁 1 ’2,张俊玲1 ’2(1.北京控制工程研究所,北京100190;.空间智能控制技术重点实验室,北京100190)摘要:随着卫星控制系统工程技术的不断发展,对设计与分析工作的数字化平台化需求日益迫切。
文章提出一种基于Matlab/Simulink开发工具的卫星姿轨控系统设计与分析平台软件方案,采用由软件运行界面框架和软件功能模块相结合的软件总体架构,实现卫星姿轨控系统总体方案设计与仿真验证一体化的设计环境。
软件实现结果表明该方案的有效性和可行性,有助于卫星姿轨控系统的快速设计与分析。
关键词:姿轨控系统;设计与分析平台;应用软件D O I:10. 3969/j.issn. 1674-7135.2016.02.014Scheme and Implementation of Satellite AOCS Designand Analysis Platform Application SoftwareLIU Qi-rui1'2,W A N G Xin-min12 ,LIU Jie12 ,Z H A N G Jun-ling12(1. Beijing Institute of Control Engineering,Beijing 100190,China;2. Key Laboratory 〇f Aerospace Intelligent Control Technology,Beijing 100190,China)Abstract:The development of s atellite control engineering makes urgent demands of digital platform for design and analysis of A0CS( Attitude and Orbit Control System). In this paper a scheme based on Matlab/Sim Satellite AOCS Design and Analysis Platform Application Software. The software architecture,which is helpful to integrative design environment f or scheme design and simulation verification of satellite AOCS subsystem is composed of user interfacc frame and functional m odule. The result of software implementation verifies the validity and availability of software scheme,which benefits rapid satellite AOCS design and analysis.Key words:AOCS;Design and analysis platform;Application software〇引言在卫星控制系统开发过程中,设计人员经过多 年实践积累了丰富的知识和经验[1’2]。
基于SOC的卫星姿轨控系统通用电模拟器设计
仿 真 ,对 太阳捕 获 、地球 捕获 及正 常模 式进行 了仿 真测 试 ,仿 真结 果表 明通 用 电模 拟 器满 足 设 计要 求 ,对其他 卫 星的地 面 电联 试有很 好 的参考价 值 。
关 键 词 陀 螺 反 作 用 轮 片 上 系 统 电 模 拟 器 地 面 测 试 姿 态 轨 道 控 帝 系 统 】
摘要
在 某型卫 星地 面 电联 试过程 中,对 该卫 星 的姿 态轨 道控 制 系统进 行 接 口分析 及
信 号 统 计 ,针 对 其 接 口复 杂 性 、信 号 多 样 性 的 特 点 ,提 出采 用 片 上 系统 ( ytm o hp S se naC i ,
S ) 片对所有 部件模 拟 器进行通 用化设 计 。文 中给 出 了该型 卫星通 用型 电模 拟 器硬 件 平 OC 芯
台设 计 方 案 以 及 陀 螺 、反 作 用轮 和 通 用 接 口模 块 的 硬 件 配 置 说 明 , 针 对 该 型 卫 星 姿 态 轨 道
控 制 系统 电联 试 要 求 ,对 所 有 部 件 按 真 实 接 口 配 置 成 电 模 拟 器 ,形 成 通 用 接 口 箱 、敏 感 器 电模 拟 器 箱 和 执 行 机 构 电 模 拟 器 箱 ,并 通 过 C AN( o tolrAraNewok 总 线 接 入 闭 环 C nrl e t r ) e
少 。文献 E i 出采 用 P I l提 X 总线构 建通 用卫 星 电模 拟器平 台是基 于标 准 总线 的 电模拟 器 ,适合 数字
式 仿 真 ,不适 合 电信号故 障模 式下 的仿 真 应 用 。文献 E ] 用 C 6采 AN 总线 和 以 太 网构 建 卫 星和 火箭
控制 系统地 面测试 平 台 ,电模 拟器 采用各 种板 卡实 现 ,并未 实现 通 用化 设计 。文献 L ] 7 只针对 反作 用飞 轮提 出了基 于 C 0 1 0 0的 电模 拟 器设 计 ,此模 拟 器 设计 针 对性 太 强 ,核 心芯 片 处 理能 力 有 8 5F 4 限 ,不适合 进行 复杂 的精 确 的模 型 计 算 和故 障模 式 注 入 仿 真 。文献 [ ] 出采 用 TMg 0 2 1 8提 2 F 8 2和 C 0 1 0 0构 建 电模拟 器 ,对于各 模拟 非标准 接 口并未进 行详 细说 明 ,不 能仿真各 种 电信号 的故障 85F 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
姿态轨道控制分系统
目标:
任务:
技术指标:
轨道设计的示意图:
轨道的任务可以被分为发射、巡航、轨道捕获和定位四个阶段。
时间轴的显示如下图。
发射和插入阶段使用的泰坦3/转移轨道(TOS)。
巡航阶段有多次轨道修正机动(TCMs)。
火星轨道的插入(MIO)阶段有一序列的确定的和统计的机动,并且火星和探测器之间建立关联之后需要进一步的纠正使探测器进入定位轨道。
定位阶段每隔两周需要进行机动消除重力不规则和大气阻力所造成的影响。
过程如下图所示。
进行火星探测器轨道初步设计时,我们可得到在四个阶段中的各设计量如下表。
在参考美国较为成功的探测器精神号、机会号、凤凰号等火星探测器,初步选定姿态控制系统为冗余结构的4个动量轮,发动机为两套推力系统。
大推力系统采用甲基联氨/四氧化二氮二组元推进剂,小推力系统采用肼单组元推进剂。
根据发动机的性能指标和各速度增量的要求,选择8个大推力的喷管,其中4个位于船尾,提供约500牛的推力用于航迹修正、火星轨道插入机动和大轨道修正,另外4个沿着两边的飞船,提供约20牛的滚转机动;16个小推力的喷管,其中8个提供约4.5 牛用于小轨道修正,另外8个约0.9 牛用于卸载动量轮的饱和;经过计算可得到推进剂的总质量大小约为1400kg。
喷管的摆放如下图。