二、数字量输入输出
地址分配原则

S7 -200系列PLC地址分配原则
S7 -200系列PLC地址分配原则有两点:第一是数字量和模拟量分别编址,数字量输入地址冠以字母“I”,数字量输出地址冠以字母“Q”,输出/输入字节可以重号。
模拟量输入地址冠以字母“AI”,模拟量输出地址冠以字母“AQ”,输出/输入字可以重号。
第二是数字量模块的编址是以字节为单位,模拟量模块的编址是以字为单位(即以双字节为单位)。
数字量扩展模块的地址分配是从最靠近CPU模块的数字量模块开始,在本机数字量地址的基础上从左到右按字节连续递增,本模块高位实际位数未满8位的,未用位不能分配给I/O 链的后续模块。
模拟量扩展模块的地址是从最靠近CPU模块的模拟量模块开始,在本机模拟量地址的基础上从左到右按字递增。
S7-200 CPU 224XP
I/O口特性:
本机数字量输入:14输入
本机数字量输出:10输出
本机模拟量输入:2输入
本机模拟量输出:1输出
数字I/O映像区:256(128、/128)
模拟I/O映像区:64(32/32)。
计算机控制技术课后习题答案
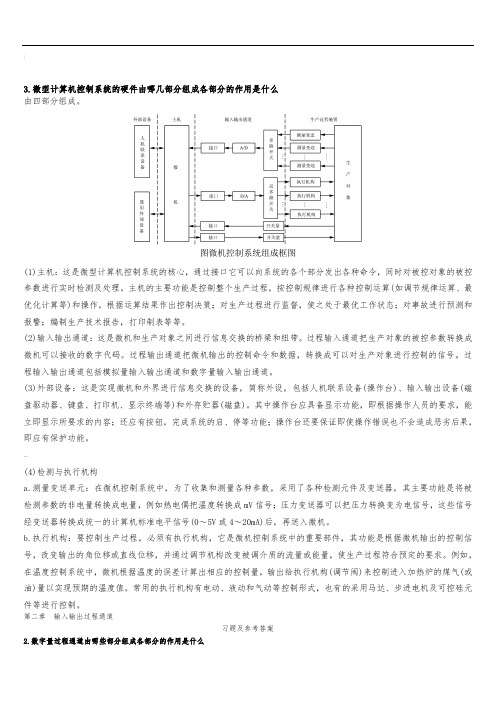
|3.微型计算机控制系统的硬件由哪几部分组成各部分的作用是什么由四部分组成。
图微机控制系统组成框图(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
(3)外部设备:这是实现微机和外界进行信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。
其中操作台应具备显示功能,即根据操作人员的要求,能立即显示所要求的内容;还应有按钮,完成系统的启、停等功能;操作台还要保证即使操作错误也不会造成恶劣后果,即应有保护功能。
—(4)检测与执行机构a.测量变送单元:在微机控制系统中,为了收集和测量各种参数,采用了各种检测元件及变送器,其主要功能是将被检测参数的非电量转换成电量,例如热电偶把温度转换成mV信号;压力变送器可以把压力转换变为电信号,这些信号经变送器转换成统一的计算机标准电平信号(0~5V或4~20mA)后,再送入微机。
b.执行机构:要控制生产过程,必须有执行机构,它是微机控制系统中的重要部件,其功能是根据微机输出的控制信号,改变输出的角位移或直线位移,并通过调节机构改变被调介质的流量或能量,使生产过程符合预定的要求。
例如,在温度控制系统中,微机根据温度的误差计算出相应的控制量,输出给执行机构(调节阀)来控制进入加热炉的煤气(或油)量以实现预期的温度值。
数字量输入输出实验
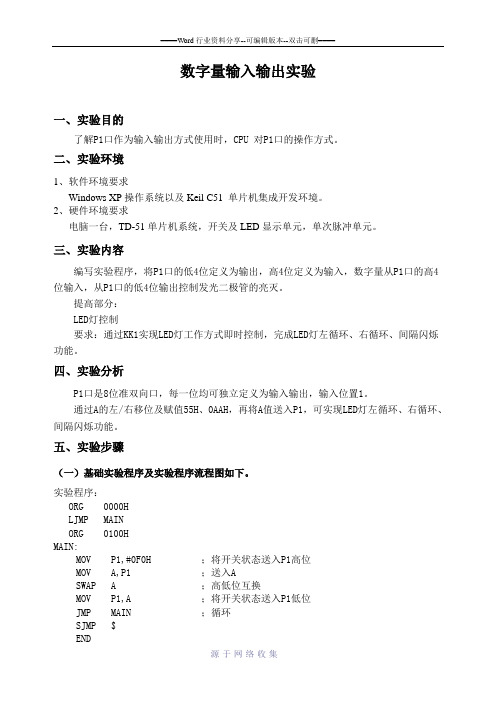
数字量输入输出实验一、实验目的了解P1口作为输入输出方式使用时,CPU 对P1口的操作方式。
二、实验环境1、软件环境要求Windows XP操作系统以及Keil C51 单片机集成开发环境。
2、硬件环境要求电脑一台,TD-51单片机系统,开关及LED显示单元,单次脉冲单元。
三、实验内容编写实验程序,将P1口的低4位定义为输出,高4位定义为输入,数字量从P1口的高4位输入,从P1口的低4位输出控制发光二极管的亮灭。
提高部分:LED灯控制要求:通过KK1实现LED灯工作方式即时控制,完成LED灯左循环、右循环、间隔闪烁功能。
四、实验分析P1口是8位准双向口,每一位均可独立定义为输入输出,输入位置1。
通过A的左/右移位及赋值55H、0AAH,再将A值送入P1,可实现LED灯左循环、右循环、间隔闪烁功能。
五、实验步骤(一)基础实验程序及实验程序流程图如下。
实验程序:ORG 0000HLJMP MAINORG 0100HMAIN:MOV P1,#0F0H ;将开关状态送入P1高位MOV A,P1 ;送入ASWAP A ;高低位互换MOV P1,A ;将开关状态送入P1低位JMP MAIN ;循环SJMP $END程序流程图:图1 LED开关控制显示功能图图2 实验接线图实验步骤:1. 按图2所示,连接实验电路图,图中“圆圈”表示需要通过排线连接;2. 编写实验程序,编译链接无误后进入调试状态;3. 运行实验程序,观察实验现象,验证程序正确性;4. 按复位按键,结束程序运行,退出调试状态;5. 自行设计实验,验证单片机其它IO 口的使用。
(二)提高实验程序及实验程序流程图如下。
实验程序:实验程序流程图:ORG 0000HLJMP MAINORG 0100HMAIN:KT: ;检查KK1SETB P3.3JNB P3.3,KTCLR P3.3LL1: ;左循环MOV A,#01HX1:MOV P1,ACALL DELAYRL ASETB P3.3JNB P3.3,X1CLR P3.3LL2: ;右循环MOV A,#80HX2:MOV P1,ACALL DELAYRR ASETB P3.3JNB P3.3,X2CLR P3.3LL3: ;间隔闪烁MOV A,#55HMOV P1,ACALL DELAYMOV A,#0AAHMOV P1,ACALL DELAYSETB P3.3JNB P3.3,LL3CLR P3.3JMP KTDELAY: ;延时子程序MOV R2,#00H图3 实验流程图MOV R3,#00HABC:DJNZ R2,ABCDJNZ R3,ABCRETSJMP $END实验步骤:(1)按图4连接实验电路;(2)编写实验程序,编译、链接无误后启动调试;(3)运行实验程序,每按一次KK1+,观察实验现象;(4)验证程序功能,实验结束按复位按键退出调试。
数字量输入模块和模拟量输入模块的区别是什么?

数字量输⼊模块和模拟量输⼊模块的区别是什么?
⼀般来说我们是吧模拟量模块分为三种的:⼀是模拟量输⼊模块、⼆是模拟量输出模块、三是模拟量输⼊/输出模块。
那数字量输⼊模块跟模拟量输⼊模块有什么区别呢?
⼀:PLC模拟量输⼊模块
模拟量⼜称A/D模块,将现场由传感器检测⽽产⽣的连续的模拟量信号转换成PLC的CPU可以接收的数字量,⼀般多为12位⼆进制数,数字量位数越多的模块,分辨率就越⾼。
⼆:PLC模拟量输出模块
模拟量输出模块⼜称为D/A模块,把PLC的CPU送往模拟量输出模块的数字量转换成外部设备可以接收的模拟量(电压或电流)。
模拟量输出模块所接收的数字信号⼀般多为12位⼆进制数,数字量位数越多的模块,分辨率就越⾼。
⽽数字量模块就是检测外部开关量输⼊的状态。
三:数字量输⼊输出信号就是开关量信号,0或者1,模拟量信号,有2种,电压或者电流信号,⼀般是变送器传过来的信号,⽐如⽤压⼒变器检测⽔管压⼒,它会输出⼀个模拟信号4-20ma 或者 0-10V的信号给PLC,PLC来进⾏数据处理,这便是数字量输⼊模块跟模拟量输⼊模块的区别了。
第5章 数字信号的输入与输出
第五章数字信号的输入与输出智能仪器的信息输入、输出,可以分为数字量与模拟量。
数字量的输入输出相对较简单,对于模拟量的输入,一般信号都比较微弱,需要放大,A/D转换等。
一、常见的数字信号数字量输入信号:开关、按钮,数字式传感器,方波信号,正弦波信号等。
数字量输出:LED显示、指示灯、液压阀、继电器控制、步进电机控制等。
二、数字量信号的输入特点:1、信号的放大与变换,对于许多数字信号,是信号很弱的周期性信号,如正弦信号,三角波信号。
而输入单片机或微机中的信号一般有一定的电压幅值要求。
如光栅输出的信号就很小的正弦波。
常用的方法,先放大,然后处理。
当电压较高时,也不能直接输入,需要进行分压。
如图所示:2、隔离,对于一些输入信号,由于波动等,很容易对系统产生影响,需要采取隔离输入,常见的是光电隔离。
下图为光耦合器的结构与特性图4-16光耦合器结构与特性a)耦合器结构b)输入特性c)输出特性3、缓冲驱动,为了提高信号的驱动能力,改善信号性能,经常在输入单片机或微机前加一级缓冲,常用的是74HC244等。
4、安全保护,当输入电压变大到一定量时,会对系统造成破坏,因此,对于输入信号变化较大的情况,需要考虑安全保护。
常用稳压二极管等。
5、开关信号输入单片机中的常见方法:按键信号TLP-521-4是4路光耦,光耦前要接限流电阻,不同的光耦由于允许电流不同,限流电阻也不同。
进入单片机前,一般加驱动器74LS244。
三、数字信号的输出1、输出信号的几个问题1)功率匹配问题,单片机或微机的输出信号功率较小,要驱动不同的负载,要求的功率不同,电压不同,所以在在输出驱动时,首先关心输出的电压与功率。
如驱动发光二极管,正向电压为2-2.5V,最大电流为2-20mA,对于AT89C51,I/O口的最大灌电流10mA,因此可以直接驱动发光二极管。
8mA,则:R=(5-2.2)/0.008=350(Ω)因此R一般选取200Ω-500Ω。
数字量输入输出
port2 RD
图2-31查询式输入程序流图
图2-30 查询式输入接口电路
数字量的输入输出控制方式
outport 输 出 设 备 数据 锁 存 器 WD DB 数据总线 inport RD
busy?
译 码 器
PO
地址 总线 AB
准备输出数据 AWAIT 读状态端口 D7 D0 busy
busy
三 态 缓 冲 器
并行输入输出接口
通用并行I/O接口芯片具有以下特点: 每个芯片集成了多个独立的并行数据传输通道, 且每个通道均可编程设置工作方式。 每个通道都提供状态查询功能,芯片有一定 的中断管理功能。
二 状态信息 反应当前外设的工作状态,是外设通过接口往CPU传送的。 三 控制信息 是CPU通过接口传送给外设的,CPU通过发送控制信息 控制外设的工作。
I/O接口
在计算机中,介于CPUO接口的作用
对信息的传输形式进行变换。(模数转换和数模转换) 电平转换和放大 I/O定向 串并转换及并串转换 锁存和缓冲
DMA方式 1. 优点 外设与内存间直接进行数据交换,不通过CPU。DMA方式 由硬件请求信号启动,又由DMAC电路完成数据传送, 整个过程完全由硬件实现,所以传送速率非常高。 2. DMA控制器的功能 能向CPU发出HOLD信号 当CPU发出HLDA信号后,接管总线控制权,进入DMA方式 发出地址信息,能对存储器寻址及能修改地址指针 能发出读写等控制信号 能决定传送字节数及判断DMA传送是否结束 发出DMA结束信号,使CPU恢复正常工作状态。
二、 I/O接口的构成
DB 数据端口 AB CPU CB
译 码
状态端口 控制端口
I/O 设备
数字量的输入输出控制方式

一、输入/输出接口
2.I/O接口电路 • (1)输入设备的I/O 接口要起到三态门的作用 • 在总线结构的微机系统中,任一时刻只能有一个设备利用 总线进行数据传送,输入设备的数据线应通过三态门与系 统相连.
一、输入/输出接口
• (2)输出设备的I/O 接口要起到锁存的作用 在总线结构的微机系统中,CPU送出的数据以广播 的形式在数据线上传出.CPU要利用总线不停的传 送数据,总线上的数据变化快,如何使慢速设备有足 够的时间处理数据?
二、CPU对输入/输出数据控制 的方式
• 4、DMA传送方式 • 实现方法:某个I/O设备需要传送时,经过DMA控制器 (DMAC)发出总线请求信号,CPU响应后暂停正在执行的 当前指令,交出总线控制权,DMAC接管总线,发出要访问 的存储器的地址及读(写)控制信号,同时也对该I/O设备 的数据端口发出读(写)控制信号,使存储器和I/O设备直 接通过数据总线完成传送.DMAC还可以进行地址修改和 字节计数,在一次请求得到响应后完成一批数据的传送,然 后撤销总线请求信号,CPU收回总线控制权,继续完成被打 断的指令。 • DMA传送方式的特点: • (1)外设和内存之间,直接进行数据传送,不通过CPU,传送 效率高.适用于在内存与高速外设、或两个高速外设之间 进行大批量数据传送。 • (2)电路结构复杂,硬件开销较大。
数字量的输入输出控 制方式
一、输入/输出接口
• 1.I/O接口的作用 • (1)实现信号的交换 • 一是实现信息性质的交换,因计算机使用的是数 字信号,而又些外围设备需要提供的是模拟信号, 两者必须通过接口进行交换;二是实现传输方式 的交换,因计算机内部的信息都是以并行方式进 行传送的,而进行计算机通信时,信号常以串行 方式传送,因此,I/O接口电路必须具有把串行数 据变换成并行传送的功能。
ABB机器人组合信号的应用

ABB机器机器人组合信号的说明在ABB机器人中一共有三种信号类型,他们分别是1.数字量输入输出(DO/DI)、2.模拟量输入输出(AO/AI)、3.组合输入输出(GO/GI),这里针对第三种组合输入输出做详细介绍:1.什么是组合输入输出?解析:组输入输出就是把2个或2个以上的数字输入或者输出信号通过一个组输入输出信号去控制输出或者获取输入。
例如:ABB机器人在和PLC走IO通讯时,机器人需要通过DO1=1、DO2=0、DO3=1这样的组合去告诉PLC机器人取料完成,或者PLC通过DI1=1、DI2=1,DI3=0这样的组合来告诉机器人去取1号物料,那么用一般的程序如下:机器人输出:机器人输入;Setdo DO1,1; WaitDI DI1=1;Setdo DO2,0; WaitDI DI2=0;Setdo DO3,1; WaitDI DI3=1;这样的程序就会有两个问题:(1).整个程序很臃肿;(2).信号是顺序给的不是同时,PLC就会有可能误判。
这时候我们就可以用组合信号GO/GI还解决这个问题2.如何配置GO/GI信号?下面以组输出(GO)为例:(1)打开Signal,点击“添加”(2)“Name”输入我们组输入/输出的名称,这里我以“GO1”为例(3).在Type of Signal中选择信号类型为组输出“Group Output”(4)在Assigned to Device 中选择的IO单元和需要绑定的DO信号一致。
(5)在Device Mapping填写地址填写地址原则:这里填写的地址和需要绑定的DO信号的地址一致例如地址是连续的:DO1地址是1,DO2地址是2,DO3地址是3则可以填:1-3如果DO的地址不是连续的:DO1地址是1,DO4地址是4,DO6地址是6 则可以用:1,4,6*此处地址一定要和需要绑定的DO地址一致(6)配置完点击“确定”,重启机器人,等待重启完成至此组信号已经全部配置完成,下面介绍GO的值如何计算因为GO是通过二进制的值取控制DO信号的输出,所以要输出DO1-DO3中的信号,就需要给GO赋予对应的二进制的值,按DO的地址在GO中排的位数对应的二进制数,需要第几位就拿他们相加。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二部分数字量I/O目录1 DO、DI硬件原理 22.1 CPC板的电路图 32.1.1 所用I\O口 42.1.2 485通讯口72.1.3 显示电路的设计82.1.4 晶振模块82.1.5 上层板的原件清单92.2 输入板I/O原理图 102.2.1 电路原理112.2.2 输入底板的原件清单122.3 输出板I/O电路图 132.3.1 反向驱动器ULN2003 芯片 14 2.3.2 输出底板的原件清单142.4 通讯部分153 DI、DO软件部分设计 163.1 通讯方式163.1.1 Modbus 协议 163.1.2 CRC校验173.1.3 莫尼康RTU 173.1.4 看门狗程序193.2 计算机界面的设计203.3 输入板的程序设计213.4 输出板的程序设计244 DI、DO的应用264.1 数字输入板的应用264.2 数字输出板的应用325. 数字量输入程序清单376.数字量输出程序清单 49硬件部分由程序下载口,状态显示,复位,信息通信,I/O口,AD,DA等几部分组成,软件部分采用MODBUS通信协议,CRC校验,看门狗程序,数据传送等部分组成。
1.DO、DI硬件原理输入板电路分为上层板电路和底板电路,其中上层板电路以Atmega128为核心,主要实现显示状态、控制端口、数据处理和通讯的功能。
设计如下:1.1CPU 板硬件原理图图2-2 输入输出上层板电路12345678161514131211109S15.1KRs 15.1K Rs 25.1K Rs 35.1K Rs 45.1K Rs 55.1K Rs 65.1K Rs 75.1K Rs 8P A 3P A 4P A 5P A 6P A 7P D 5P D 6P D 7VCC1.1.1所用I\O口AVR AT128共有53条I/O口,作为输入、输出口用32条,程序下载端口用PB0、PB1、PE1通讯端口用PD2、PD3通讯显示灯用PA2具体如下图所示:图1-3 I\O口的设计1.1.2R S23-485电路RS-232-C接口在总线上只允许连接1个收发器,即单站能力。
而RS-485接口在总线上是允许连接多达128个收发器。
即具有多站能力,这样用户可以利用单一的RS-485接口方便地建立起设备网络。
所以电路中采用了RS232-485电路。
RS232-485转换器主要包括了电源。
232电平转换,485电路三部分。
本电路的232电平转换电路采用了NIH232或者也可以直接使用MAX232集成电路,485电路采用了MAX485集成电路。
为了使用方便,电源部分设计成无源方式,整个电路的供电直接从PC机的RS232接口中的DTR(4脚)和RTS(7脚),PC串口的每根线可以提供大约9mA的电流,因此两根线提供的电流足够供给这个电路使用了。
经实验,本电路只使用其中一条线也能够正常工作。
使用本电路需注意PC程序必须使串口的DTR和RTS输出高电平,经过D3稳压后得到VCC,经过实际测试,VCC电压大约在4.7V左右。
因此,电路中要说D3起的作用是稳压还不如说是限压功能。
MAX485是通过两个引脚RE(2脚)和DE(3脚)来控制数据的输入和输出。
当RE为低电平时,MAX485数据输入有效;当DE为高电平时,MAX485数据输出有效。
在半双工使用中,通常可以将这两个脚直接相连,然后由PC或者单片机输出的高低电平就可以让MAX485在接收和发送状态之间转换了。
由于本电路DTR和RTS都用于了电路供电,因此使用TX线和HIN232的另外一个通道及Q1来控制MAX485的状态切换。
平时NIH232的9脚输出高电平,经Q1倒相后,使MAX485的RE和DE为低电平而处于数据接收状态。
当PC机发送数据时,NIH232的9脚输出低电平,经Q1倒相后,使MAX485的RE和DE为高电平而处于数据发送状态。
RS232-485电路图如图2-3所示。
图2-3 RS232-485电路图1.1.3485通讯口图1-4通讯模块的设计RS-485芯片内部含有一个接收器输出端(1脚RO)、驱动器输入端(4脚DI),与单片机连接时只需分别与单片机的RXD和TXD相连即可。
本设计中RO端和DI端通过一个2K的电阻和发光二极管接+5V电压显示了接受和发送状态。
RE和DE端分别为接收和发送的使能端,当RE为逻辑0时,器件处于接收状态;当DE为逻辑1时,器件处于发送状态,采用屏蔽双绞线就可以连接多达128个收发器设备,组成半双工控制网络。
A端和B端分别为接收和发送的差分信号端,当A引脚的电平高于B时,代表发送的数据为1;当A的电平低于B端时,代表发送的数据为0,与单片机相连时RS-485的A、B端一般一般可选100Ω的电阻。
图中的J3排针为与底板的连接口,二极管D1起到稳压作用,防止上电时电压过高烧坏芯片。
1、485芯片使能的设计RS-485芯片是工作在半双工状态,所以接受和发送的使能端一起接到三极管8550的集电极。
2、8550作用:8550PNP三极管集电极与单片机的TXD端相接,通过三极管的开关作用来触发其接收发送使能。
1.1.4 显示电路的设计发光二极管共阳极接,任意输入端口为低电平,对应的灯就会亮,电阻的大小是根据发光二极管的压降(一般为1.5--2V ,其工作电流一般取3-5 mA 为宜)而选择的。
图1-5 显示状态的设计1.1.5 晶振模块晶体振荡电路:XTAL1与XTAL2分别为用作片内振荡器的反向放大器的输入和输出,这个振荡器可以使用石英晶体,也可以使用陶瓷谐振器。
熔丝位CKOPT 用来选择这两种放大器模式的其中之一。
C1和C2的数值要一样,不管使用的是晶体还是谐振器。
最佳的数值与使用的晶体或谐振器有关,还与杂散电容和环境的电磁噪声有关。
1-6晶振电路的设计1.1.6CPU板的原件清单1.2输入板底板原理图图1-7 输入I/O 板电路123456789J1A BDO模块以ATmega128L为核心。
其中32条口线定义为输出口线,外接光电转换器保证其外部电路为标准24V直流供电,内部使用高质量DCDC电源转换提供5w以上的电源保证芯片的正常运行。
其串口设为RS485接收状态,使用485发送接收核心芯片,可以提供高阻抗系统,保证电平输出的有效性。
并且以MODBUS协议为数据载体,使数据的可靠性得到充分的保证。
1.2.1电路原理图1-8输入底板的设计根据光耦的导通原理,当D2、D3的端接入24V地低电平时,接通发光源的左边电路就会导通,发光二极管发光,此时,受光器就会导通产生电流。
由于受光器的导通后的电阻很小可以忽略,使in24、in25端相当于直接连接5V高电平,即把有效的高电平数据信号传入上层板单片机,并作处理。
同时外界对应的指示灯点亮。
同理,当D2、D3端接入24V时,发光源不导通,不会发光,受光器就不会产生光电流,使in24、in25端相当于直接连接(5V地)低电平,此时和没有工作时的状态是一样的,单片机不处理数据。
1、光电耦合器电路的设计光电耦合器又电平转化的作用,输入端的10K电阻为发光源内部的发光二极管提供正常的工作电压1.5-2V,工作电压3-5mA,输出端口的电阻4.7k为上拉电阻。
2、光电耦合器输入端口的滤波器输入口1K的电阻和0.1uf的电容组成RC滤波器,对电源进行滤波。
1.2.2输入I/O板的原件清单1.3输出底板电路图图1-9 输出板底板的设计123456789J1A B 00010203040506070809101112131415161718192021222324252627282930310.1uFC70C71C72C73C74C75C76C77C78C79C80C81C82C83+24V 0.1uF C86C87C88C89C90C91C92C93C94C95C96C97C98C99+24VC84C85C100C101O00O01O02O03O04O05O06O07O08O09O10O11O12O13O14O15O16O17O18O19O20O21O22O23O24O25O26O27O28O29O30O3147uFC102+24V光电隔离管PC817将24V信号源与5V信号源隔离开来,当5V信号输出端口为低电平,即相应状态指示灯亮,光电隔离管右端通过2003芯片任意端口接外部回路就会导通。
对应的5V信号端为低电平,上层板对应指示灯亮。
单片机输出PC机命令控制外部继电器的通断。
1.3.1反向驱动器ULN2003 芯片图1-10 芯片2003在电路中的连接ULN2003是驱动集成电路,它起反向驱动放大作用.可以解决控制芯片输出的负载能力太低的问题,最大驱动电压=50V,电流=500mA。
1.3.2输出I/O板的原件清单1.4 通讯部分本设计的通信部分采用MODBUS 协议中的RTU 模式,采用CRC 校验和看门狗程序,PC 与PLC 之间采用RS232转RS485通信,PLC 与PLC 之间采用RS485通信, 下图为RS-485与ATmega128单片机及PC 机的典型连接示意图。
2DI、DO软件部分设计2.1通讯方式2.1.1M odbus 协议串口通信采用MODBUS协议RTU方式,制定了消息域格局和内容的公共格式。
当在Modbus网络上通信时,此协议决定了每个控制器的设备地址,识别按地址发来的消息。
如果需要回应,控制器将生成反馈信息,并用Modbus协议发出。
1、在Modbus网络上转输标准的Modbus口是使用RS-232C兼容串行接口,它定义了连接口的针脚、电缆、信号位、传输波特率、奇偶校验。
MODBUS-RTU协议的命令子集,(莫迪康只遵循读(02)写(05)和读写(01)命令)。
控制器通信使用主—从技术,即一个设备(主设备)能初始化传输(查询),其它设备(从设备)根据主设备查询提供的数据作出相应反应。
主设备单独和从设备通信,从设备返回一消息作为回应, Modbus协议建立了主设备查询的格式,即计算机发送命令:[设备地址] [命令号01] [起始寄存器地址高8位] [低8位] [读取的寄存器数高8位] [低8位] [CRC校验的低8位] [CRC校验的高8位]从设备回应消息也由Modbus协议构成,设备响应的格式:[设备地址] [命令号01] [返回的字节个数][数据1][数据2]...[数据n][CRC校验的低8位] [CRC校验的高8位],如果在消息接收过程中发生一错误,或从设备不能执行其命令,从设备将建立一错误消息并把它作为回应发送出去。
例:计算机发送命令:[11][01][00][13][00][25][CRC低][CRC高]意义如下:<1>设备地址:在一个485总线上可以挂接多个设备,此处的设备地址表示想和哪一个设备通讯。