下推式磁悬浮系统软件设计
磁悬浮小球控制系统软件设计毕业设计(论文)

磁悬浮小球控制系统软件设计摘要磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。
随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。
本设计以PID控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。
最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。
PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。
目前大多数工业控制器都是PID控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
关键字:磁悬浮系统,PID控制器,MATLAB仿真ABSTRACTMagnetic suspension technology, which has a series of advantages such as contact-free, no friction, no wear, no need of lubrication and long life expectancy, is widely concerned and adopted in high-tech areas such as energy, transportation, aerospace, industrial machinery and life science.With the extensive application of maglev technology, the control of the maglev system has become a priority. In this paper, for the principle of PID control, PID controller designed to control magnetic suspension system.On the basis of analyzing of magnetic suspension system’s structure and working principle, its system mathematical model was established, this thesis describe PID controller designed and get control scheme. It gets the better control parameters by MATLAB software simulation studies, and real-time control of magnetic suspension control system to verify the control parameters. The key research works for further study are proposed at last.Since PID controllers have been the process of industrial production has been most widely and most sophisticated controller. Most industrial controllers are PID controllers or modified. While in the control area, a variety of new controllers continue to emerge, but the PID controller is its simple structure, easy to implement, robust, etc., in a dominant position.Key words: magnetic suspension system; PID controller; MATLAB simulation毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
下推式磁悬浮关键器件参数说明文件

下推式磁悬浮关键器件参数说明文件一、概述磁悬浮技术是一种利用磁场作用力将物体悬浮起来的技术。
在磁悬浮系统中,下推式磁悬浮关键器件起着重要的作用。
本文将对下推式磁悬浮关键器件的参数进行详细说明。
二、磁悬浮技术的应用磁悬浮技术广泛应用于交通运输、工业生产等领域。
下推式磁悬浮关键器件作为磁悬浮系统中的核心部件,能够提供稳定的悬浮力和驱动力,从而实现物体的悬浮以及运动控制。
三、下推式磁悬浮关键器件的参数说明下推式磁悬浮关键器件有多个参数需要进行说明,包括: ### 1. 磁场控制模块下推式磁悬浮关键器件中的磁场控制模块负责产生磁场,控制悬浮体的运动。
磁场控制模块的参数包括: - 磁场稳定性:指磁场的稳定程度,通常以磁场波动范围来衡量。
- 磁场强度:指磁场的大小,通常以磁场密度来表示,单位为特斯拉(T)。
- 磁场方向:指磁场的方向,可以是单一方向或多个方向的组合。
2. 悬浮体结构下推式磁悬浮关键器件中的悬浮体结构决定了物体的悬浮方式和稳定性。
悬浮体结构的参数包括: - 材料选择:选择合适的材料以提供足够的磁场响应和强度。
- 结构稳定性:指悬浮体结构的稳定程度,可以通过模拟分析或实验测试得到。
3. 驱动力源下推式磁悬浮关键器件中的驱动力源负责提供推动力,驱动悬浮体运动。
驱动力源的参数包括: - 驱动力大小:指驱动力的大小,通常以牛顿(N)为单位。
- 驱动力响应速度:指驱动力的响应速度,通常以毫秒(ms)为单位。
4. 控制系统下推式磁悬浮关键器件中的控制系统负责对磁悬浮系统进行控制。
控制系统的参数包括: - 控制算法:选择合适的控制算法以实现对悬浮体的运动控制。
- 控制精度:指控制系统的精度,通常以位置误差或速度误差来衡量。
四、下推式磁悬浮关键器件的优势和挑战1. 优势•磁悬浮技术可以实现非接触式悬浮,减小了摩擦和磨损,提高了系统的可靠性和寿命。
•下推式磁悬浮关键器件能够提供稳定的悬浮力和驱动力,实现精确的物体控制。
磁悬浮控制装置设计开发方案及流程
磁悬浮控制装置设计开发方案及流程磁悬浮技术是一种新型的悬浮运输技术,它通过磁力将载体浮起并悬浮在导轨或导管上,从而实现高速、稳定的运输。
磁悬浮技术可以广泛应用于城市轨道交通、高速铁路、物流运输等领域。
磁悬浮控制装置是磁悬浮技术中的核心部件,负责控制磁悬浮载体的运动状态和速度,保证系统的安全和稳定运行。
本文将介绍磁悬浮控制装置的设计开发方案及流程。
1. 磁悬浮控制系统架构设计磁悬浮控制系统由控制器、传感器、执行器和电源等部分组成。
其基本架构通常包括采集子系统、控制子系统、执行子系统和通信子系统。
在设计磁悬浮控制系统架构时,需要考虑到系统的安全性、可靠性、高效性和优化性等方面。
2. 磁悬浮轨道数据采集与处理在磁悬浮控制系统中,轨道上的数据是非常重要的。
因此,在设计磁悬浮控制装置时,需要考虑如何采集和处理轨道数据。
通常会采用传感器对轨道上的数据进行采集,然后通过信号处理和数据分析等方式,对采集到的数据进行预处理和优化。
在磁悬浮控制系统中,控制算法的设计是至关重要的。
磁悬浮载体控制算法需要考虑到载体的运动状态、速度、加速度等因素。
通常会采用PID控制算法、模糊控制算法、神经网络控制算法等方式,来实现磁悬浮载体控制。
磁悬浮控制系统的硬件设计是整个系统中最为基础和关键的部分。
在硬件设计时,需要考虑到系统的功耗、体积、重量和成本等因素。
通常会采用高速处理器、可编程逻辑器件、模拟电路和电源管理电路等元器件,来实现磁悬浮控制系统的硬件设计。
1.需要完成的主要工作在磁悬浮控制装置的开发过程中,需要完成的主要工作有:系统架构设计、硬件设计、软件开发、系统测试和实验评价等。
其中,硬件设计和软件开发是整个开发过程中最为重要的部分。
2.开发流程在磁悬浮控制装置的开发过程中,通常会按照以下开发流程进行:(1)系统需求分析。
首先,需要对磁悬浮控制装置的功能和性能需求进行分析和确定,以确保系统的稳定性和可靠性。
(2)系统架构设计。
基于STM32单片机的微型磁悬浮装置的设计

图 5 x 轴的双闭环串级 PID 控制框图
2.3 软件流程 本文选用 STM32F103C8T6 单片机作为主控制器,通
过 MDK ⁃Keil5 IDE 软件进行程序设计和调试见图 6 和 图 7。
图 6 主程序流程图
图 7 串口中断接收程序
图 6 和图 7 分别为主程序和串口中断接收程序两大 部分。在中断处理时,通过串口中断接收上位机发送来 的 命 令 和 数 据 ,并 缓 存 到 全 局 变 量 环 形 数 组 区 ,并 使 用 定时器中断设计 15 ms 控制周期定时。
调试完 PID 参数后,开始悬浮测试,该磁悬浮装置 的底座实物图如图 8 所示。本文使用直径 25 mm、厚度 10 ms 的圆柱体钕铁硼磁铁作为永磁体,以及直径 3 cm 厚度 5 mm 的圆柱体钕铁硼磁铁作为浮子。
第 14 期
杜明昊,等:基于 STM32 单片机的微型磁悬浮装置的设计
29
子 的 位 置 信 息 ,以 永 磁 体 的 中 心 为 原 点 ,建 立 直 角 坐 标 系 ,霍 尔 h1 测 量 x 轴 方 向 上 的 浮 子 磁 通 量 信 息 ,霍 尔 h2 测 量 y 轴 方 向 上 的 浮 子 磁 通 量 信 息 。 [7] 因 此 ,通 过 STM32 单 片 机 片 内 ADC 外 设 得 到 磁 通 量 值 ,进 行 数 学 坐标模型化后,可以得到浮子的水平位置。
2 磁悬浮装置的控制设计
2.1 浮子姿态位置 磁悬浮装置平面结构示意图如图 4 所示。磁通量
测量单元里的 2 个相互垂直的霍尔元件,可以测量出浮
图 3 磁通量测量单元
图 4 磁悬浮装置平面结构示意图
2.2 双闭环串级 PID 控制 浮子稳定悬浮时,所需的悬浮斥力主要由永磁体提
磁悬浮系统设计
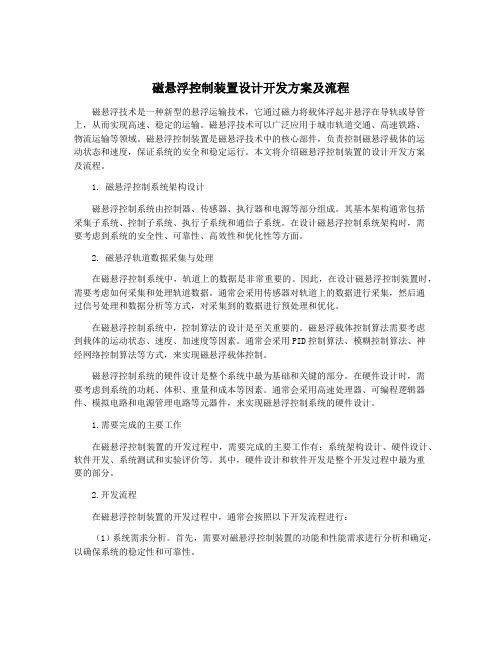
磁悬浮系统设计作者:李欣颀李云飞陈子川蔡兴宗杨梦玉来源:《科学导报·学术》2020年第49期摘要:采用微元分析方法构建下推式磁悬浮系统的数学解析式模型,构建下推式磁悬浮控制系统硬件平台。
由正交放置的霍尼韦尔3503传感器采集浮子磁场在其垂直分量上的磁场大小,线性转换成电信号经运算放大器放大后作为控制器STM32读取和写入控制信息,并用于数字滤波算法和运行控制算法后将计算数据作用于功率放大器件驱动螺旋线圈产生校正磁场。
使浮子处于动态平衡,达到预期控制效果。
1 系统模型设计一种多自由度,下推磁场磁悬浮系统。
控制目标是让浮子不借助除磁场以外的力,稳定悬停在指定空间位置,并在此控制基础上完成悬浮磁体对随机扰动的控制。
通过下推式磁悬浮磁源概念图,环形磁铁产生较大的谷形磁场。
使得浮子磁体在垂直方向上收到与重力相反的排斥力,因此物体悬浮的高度只能取决于环形磁铁的磁场的大小和浮子或浮子与浮子及其称重物质量决定。
在水平面上,浮子受到随机扰动,向远离中心位置运动。
受到不对称的磁场力斥力,吸引力大的一边会持续增加,吸引力小的一边会愈加减小,促进浮子磁体向远离中心位置运动;在磁场中还受到旋转力矩的作用,会使浮子发生翻转。
因而为了保障水平面上浮子磁体的稳定,必需投入新的微弱的磁场克服原先的运动状态。
使其在设定位置达到平衡。
Vizimag是利用有限元分析来仿真复杂磁场的软件,用Vizimag的软件来画出合成磁场分布,仿真出浮子受沿X方向的电磁力和垂直方向上的旋转力矩来。
如下所示。
可见,在不平衡位置,浮子磁体会收到纵向的力使浮子加速移动产生更大的位置误差,同时会受到转矩,使浮子磁体发生翻转。
2 硬件系统设计如图2所示,下推式磁悬浮的整个控制系统包括电源模塊、位置测量模块,功率放大模块和主控制器模块。
芯片的全部的电力供应来源于电源模块,本文设计三种板载电源,分别为12V、5V、和3.3V。
3.3V的电压供给STM32主控制器使用,5V的电压供给位置检测模块内芯片、驱动芯片使用,12V的电压供给驱动模块使用。
下推式磁悬浮系统软件设计

下推式磁悬浮系统软件设计摘要磁悬浮系统能够创造一个无接触、无摩擦、无润滑的特殊空间环境,磁悬浮技术可以用于实现零部件间无摩擦相对运动,不仅提高了运动速度与精度,而且还能延长零部件使用寿命。
由于磁悬浮系统的这些优点,目前它不仅在电气等工业领域得到广泛应用,而且在人类生活中也开始得到应用,充分显示了磁悬浮技术在国民经济发展和人们生活质量提高方面具有广阔的发展前景,因此对它进行设计或研究具有十分重要的理论意义和现实意义. 其中对磁悬浮系统的控制成为目前的首要问题。
随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。
本设计以 Arduino 开发板为平台,以 PID 控制和脉宽调制为原理,通过单片机编程设计出 PID 控制器对磁悬浮系统进行控制。
PID 控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器,以其结构简单、易实现、适应性强等优点,处于主导地位。
本设计将创建一个基于Arduino 开发板的下推式磁悬浮系统,在分析磁悬浮系统构成及工作原理的基础上,确定控制方案,通过编写系统控制程序,不断调节PID 控制参数,并通过调节PWM 的占空比来实时控制电磁线圈的电流,从而使悬浮物体在设定位置得到与干扰力相平衡的电磁吸力,最终得到一个稳定的磁悬浮系统,此外系统还能够和 PC 机进行动态通信,由PC 机实现对该磁悬浮系统的实时控制。
最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。
关键词:磁悬浮系统,Arduino 开发板,PID 控制,脉宽调制THE SOFTWARE DESIGN OFPUSH TYPE MAGNETIC LEVITATION SYSTEMABSTRACTMagnetic levitation system can create a no conta ct, no friction, no lubrication of the special space environment . Maglev technology can be used to implement parts of no friction between the relative motion, not only increases the movement speed and accuracy, but also can prolong the service life of components. Because of these advantages of maglev system, it not only in the electrical industry is widely used, but is also beginning to be used in human life. It fully shows that magnetic suspension technology has a board development prospect on improving the development of national economy and the quality of life. Therefore, it has a very important theoretical significance and practical significance on designing or researching the system, and the control of the system has become the first problem.With the extensive application of maglev technology, the control of the maglev system has become a priority. In this paper, for the principle of PID control, Arduino development board as platform, PID controller designed to control magnetic suspension system. Since PID controllers have been the process of industrial production has been most widely and most sophisticated controller by its simple structure, easy to implement, robust, etc., in a dominant position.This design will create a magnetic suspension system bas ed on the Arduino development board. On the basis of analyzing of magnetic suspension system’s structure and working principle, we will get the control scheme. Through making the program of the control system, regulating the PID parameters and changing the frequency of the PWM, we can control the electromagnetic coil current in real time, and the suspended object will obtains an electromagneticforce to balance the gravity at the predetermined locations. Then we will get a stable magnetic suspension system. In addition, the system can do a dynamic communication with the personal computer, and realize the real -time control by the personal computer. At last, the key research works for further study are proposed.KEY WORDS: magnetic suspension system, Arduino development board, PID controller, Pulse Width Modulation目录前言 (1)第 1 章绪论 (2)§1.1 设计的依据与意义 (2)§1.2 国内外同类设计的概况综述 (3)§1.3 本课题设计的主要任务 (4)第 2 章磁悬浮系统的结构 (5)§2.1 磁悬浮系统的工作原理 (5)§2.2 磁悬浮系统的组成 (6)§2.3 磁悬浮系统的结构特点 (7)§2.4 磁悬浮系统的主要参数 (7)第 3 章下推式磁悬浮控制系统设计 (9)§3.1 位置检测原理 (9)§3.2 控制系统设计 (10)§3.2.1 系统数学模型 (10)§3.2.2 控制器设计 (11)§3.2.3 系统仿真 (12)§3.3 小结 (14)第 4 章磁悬浮软件设计 (15)§4.1 软件开发环境介绍 (15)§4.1.1 Arduino nano 开发板介绍 (16)§4.1.2 Arduino编程环境 (17)§4.2 软件设计思想与程序流程图 (19)§4.3 数据采集 (20)§4.4 PID调节控制 (21)§4.5 PWM输出 (24)§4.6 上位机通信 (27)§4.7 按键变化功能 (27)第 5 章运行调试与结果分析 (30)§5.1 硬件接线 (30)§5.2 程序的编译与上传 (30)§5.3 确定系统极性 (31)§5.4 PID参数整定 (32)§5.5 结果 (34)结论 (36)参考文献 (37)致谢 (38)前言磁悬浮技术属于自动控制技术,它是随着控制技术的发展而建立起来的。
无线供电磁悬浮灯设计与制作
童雨花 等
Abstract
With the rapid development of the Internet, the development trend of smart lights has gradually moved closer to the Internet. In modern life, single-function traditional lights can no longer meet the needs of smart homes. Compared with traditional lights, smart lights have a more beautiful appearance, and users can adjust the brightness of smart lights according to their own needs, protecting the user’s eyesight, and avoiding the single function of traditional lights, and the energy consumption of smart lights is relatively low, the service life is relatively long, and the risk of electric shock is greatly reduced. In this paper, through the demonstration of wireless power supply scheme, magnetic levitation mode, control mode, combined with magnetic levitation technology and emerging wireless power supply technology, a wireless electromagnetic levitation lamp system with STM32F103C8T6 as the main controller is designed. The system is mainly composed of STM32 minimum system, coil drive module, wireless power supply module, Hall sensor output voltage differential proportional operation circuit module, display module, auxiliary power module and magnetic suspension control module. According to the principle of resonant electromagnetic coupling power transmission, the wireless power supply is provided to the lamps through the wireless transmitter and wireless receiver circuits. At the same time, the STM32 single-chip is used to generate PWM waves through the coil drive module to drive the coil to generate magnetic force. The suspension is detected by the Hall sensor, and the feedback is input to the STM32 microcontroller. The PID algorithm is used to achieve the suspension stability of the magnetic suspension system, and the magnetic suspension system is controlled to realize the stable suspension of the lamp above the magnetic suspension device.
下推式磁悬浮控制装置机械功能说明
下推式磁悬浮控制装置机械功能说明
1. 引言
大家好,今天我们聊聊一个非常酷炫的科技玩意儿——下推式磁悬浮控制装置。
听名字就觉得高大上,对吧?其实,它的原理并没有那么复杂,简单来说,就是利用磁力让物体漂浮起来,真的是“飞起来”的感觉呢!这玩意儿在我们日常生活中可不止用来炫技哦,咱们慢慢来捋一捋它的功能和用途。
2. 磁悬浮的基本原理
2.1 什么是磁悬浮?
首先,磁悬浮听起来是不是有点像科幻电影里的情节?其实,它就是利用电磁力来抵抗重力,让物体在空中悬浮。
比如说,想象一下,你把一块磁铁放在桌子上,然后用另一块磁铁在上面“踩着”,就像在玩“反重力”的游戏。
这种效果在下推式磁悬浮控制装置中就得到了应用。
2.2 为什么要用下推式?
说到下推式,你可能会问,为什么要采用这种设计呢?其实,这种设计让物体在悬浮时更加稳定。
就像骑自行车一样,保持平衡最重要。
如果你用错了方法,结果就可能摔得四脚朝天!下推式的结构就像是给物体加了个“安全带”,确保它在空中漂浮的时候不容易晃动。
3. 机械功能的实际应用
3.1 用在哪些地方?
说到应用。
这下推式磁悬浮控制装置可真是无处不在。
你知道吗?在高铁上。
列车就是利用磁悬浮技术飞速前进的。
想想。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
下推式磁悬浮系统软件设计 摘 要
磁悬浮系统能够创造一个无接触、无摩擦、无润滑的特殊空间环境,磁 悬浮技术可以用于实现零部件间无摩擦相对运动, 不仅提高了运动速度与精 度,而且还能延长零部件使用寿命。由于磁悬浮系统的这些优点,目前它不 仅在电气等工业领域得到广泛应用,而且在人类生活中也开始得到应用,充 分显示了磁悬浮技术在国民经济发展和人们生活质量提高方面具有广阔的 发展前景,因此对它进行设计或研究具有十分重要的理论意义和现实意义 . 其中对磁悬浮系统的控制成为目前的首要问题。 随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。本 设计以 Arduino 开发板为平台,以 PID 控制和脉宽调制为原理,通过单片机 编程设计出 PID 控制器对磁悬浮系统进行控制。PID 控制器自产生以来,一 直是工业生产过程中应用最广、也是最成熟的控制器,以其结构简单、易实 现、适应性强等优点,处于主导地位。 本设计将创建一个基于 Arduino 开发板的下推式磁悬浮系统, 在分析磁 悬浮系统构成及工作原理的基础上, 确定控制方案, 通过编写系统控制程序, 不断调节 PID 控制参数, 并通过调节 PWM 的占空比来实时控制电磁线圈的电 流,从而使悬浮物体在 设定位置得到与干扰力相平衡的电磁吸力,最终得 到一个稳定的磁悬浮系统,此外系统还能够和 PC 机进行动态通信,由 PC 机实现对该磁悬浮系统的实时控制。最后, 本设计对以后研究工作的重点进 行了思考,提出了自己的见解。
KEY WORDS: magnetic suspension system, Arduino development board, PID controller, Pulse Width Modulation
河南科技大学毕业设计(论文)
目
前
录
言 ................................................. 1 绪论 .......................................... 2 设计的依据与意义 ............................. 2 国内外同类设计的概况综述 ..................... 3 本课题设计的主要任务 ......................... 4 磁悬浮系统的结构 .............................. 5 磁悬浮系统的工作原理 ......................... 5 磁悬浮系统的组成 ............................. 6 磁悬浮系统的结构特点 ......................... 7 磁悬浮系统的主要参数 ......................... 7 下推式磁悬浮控制系统设计 ..................... 9 位置检测原理 ................................. 9 控制系统设计 ................................ 10 系统数学模型 ............................. 10 控制器设计 ............................... 11 系统仿真 ................................. 12
第 1 章 §1.1 §1.2 §1.3 第 2 章 §2.1 §2.2 §2.3 §2.4 第 3 章 §3.1 §3.2
§3.2.1 §3.2.2 §3.2.3 §3.3 第 4 章 §4.1
小结 ........................................ 14 磁悬浮软件设计 ............................... 15 软件开发环境介绍 ............................ 15
关 键 词: 磁悬浮系统, Arduino 开发板, PID 控制,脉宽调制
河南科技大学毕业设计(论文)
THE SOFTWARE DESIGN OF PUSH TYPE MAGNETIC LEVITATION SYSTEM ABSTRACT
Magnetic levitation system can create a no contact, no friction, no lubrication of the special space environment. Maglev technology can be used to implement parts of no friction between the relative motion, not only increases the movement speed and accuracy, but also can prolong the service life of components. Because of these advantages of maglev system, it not only in the electrical industry is widely used, but is also beginning to be used in human life. It fully shows that magnetic suspension technology has a board development prospect on improving the development of national economy and the quality of life. Therefore, it has a very important theoretical significance and practical significance on designing or researching the system, and the control of the system has become the first problem. With the extensive application of maglev technology, the control of the maglev system has become a priority. In this paper, for the principle of PID control, Arduino development board as platform, PID controller designed to control magnetic suspension system. Since PID controllers have been the process of industrial production has been most widely and most sophisticated controller by its simple structure, easy to implement, robust, etc., in a dominant position. This design will create a magnetic suspension system based on the Arduino development board. On the basis of analyzing of magnetic suspension system’s structure and working principle, we will get the control scheme. Through making the program of the control system, regulating the PID parameters and changing the frequency of the PWM, we can control the electromagnetic coil current in real time, and the suspended object will obtains an electromagnetic
§4.1.1 Arduino nano 开发板介绍 .................... 16 §4.1.2 Arduino 编程环境 ........................... 17 §4.2 §4.3 §4.4 §4.5 §4.6 §4.7 软件设计思想与程序流程图 .................... 19 数据采集 .................................... 20 PID 调节控制 ................................. 21 PWM 输出 ..................................... 24 上位机通信 .................................. 27 按键变化功能 ................................ 27
河南科技大学毕业设计(论文)
第 5 章 §5.1 §5.2 §5.3 §5.4 §5.5 结 致
运行调试与结果分析 ........................... 30 硬件接线 .................................... 30 程序的编译与上传 ............................ 30 确定系统极性 ................................ 31 PID 参数整定 ................................. 32 结果 ........................................ 34
河南科技大学毕业设计(论文)
force to balance the gravity at the predetermined locations. Then we will get a stable magnetic suspension system. In addition, the system can do a dynamic communication with the personal computer, and realize the real -time control by the personal computer. At last, the key research works for further study are proposed.