第四章 控制系统的传递函数(2)
现代控制理论-4-控制系统的稳定性分析

外部稳定性只适用于线性系统,内部稳定性不但适用于线性系 统,而且也适用于非线性系统。对于同一个线性系统,只有在 满足一定的条件下两种定义才具有等价性。
不管哪一种稳定性,稳定性是系统本身的一种特性,只和系统 本身的结构和参数有关,与输入-输出无关。
V ( x)半负定
同时有
& V
(
x
)
-
2
x22
不可能恒为零。
由判据2可知,系统在原点处的平衡状态是渐近稳定的。
27
4.5 李雅普诺夫方法 在线性系统中的应用
28
一、线性定常连续系统的稳定性分析
目的:将李氏第二法定理来分析线性定常系统 x& Ax 的稳定性
讨论:V选&(x择) 二(x次T P型x)函 x&数T PVx +(xx)TPxx& TP(xAx为)T P李x +氏x函T PA数x。
如果d 与初始时刻 t0无关,则称平衡状态xe为一致渐近稳定。
渐近稳定几何表示法:
10
3、大范围渐近稳定
如果对状态空间的任意点,不管初始偏差有多大,都有渐
近稳定特性,即:lim x t
- xe
0
对所有点都成立,称平衡状态xe为大范围渐近稳定的。其
渐近稳定的最大范围是整个状态空间。
必要性:整个状态空间中,只有一个平衡状态。 (假设有2个平衡状态,则每个都有自己的稳定范 围,其稳定范围不可能是整个状态空间。)
(2) 求系统的特征方程:
det(lI
-
A)
l
- 1
求得: l1 2,l2 -3
2-4 线性系统的传递函数

0
T
t
11
惯性环节的实例如下图所示。
R C uc
ur
(a)
在图(a)所示的电路中,输出电压uc与输入电 压ur间的微分方程为
du c T + uc = ur dt
式中T=RC,为电路的时间常数。
12
if uf
Rf
Lf
(b)
在图(b)所示的直流电机的激磁电路中,当 以激磁电压uf为输入量、以激磁电流if为输出量 时,其电路方程为
G (s) = R(s) =
m m −1 1 0
a n s + a n −1 s
n
n −1
+ …… + a1 s + a 0
( 2 − 50 )
可见,传递函数是由系统微分方程经拉氏变换而引出 的。 系统输入、输出及传递函数之间的相互关系可用 下图表示,输出是由输入经过G(s)的传递而得到的, 因此称G(s)为传递函数。因为传递函数是在零初始条 件下定义的,故在初始条件为零时,它才能完全表征 系统的动态性能。
+ (a)
C ic uc
ur n θ
(b)
ur 在图(a)中,因为 i c = i = R
容两端电压,所以有
uc = 1 c
而输出电压uc近似等于电
∫ i c dt =
在图(b)中,以电动机的转速n(转/分)为输入量, 以减速齿轮带动负载运动的轴的角位移θ为输出量, 可得微分方程 1
θ (t ) =
§2-4 线性系统的传递函数
控制系统的微分方程,是时域中描述系统动态性 能的数学模型,求解微分方程可以得到在给定外界作 用及初始条件下系统的输出响应,并可通过响应曲线 直观地反映出系统的动态过程。但系统的参数或结构 形式有变化,微分方程及其解都会同时变化,不便于 对系统进行分析与研究。 根据求解微分方程的拉氏变换法,可以得到系统 的另一种数学模型——传递函数。它不仅可以表征系 统的动态特性,而且可以方便地研究系统的参数或结 构的变化对系统性能所产生的影响。在经典控制理论 中广泛应用的根轨迹法和频率法,就是在传递函数基 础上建立起来的。
自动控制原理第四章习题解答
4
胡寿松自动控制原理习题解答第四章
(2) G(s) =
K ∗ (s + 20)
。
s(s + 10 + j10)(s + 10 − j10)
解:
系统开环传递函数为 G(s) =
K ∗ (s + 20)
s(s + 10 + j10)(s + 10 − j10)
有三个极点:p1 =(0,j0),p2 =(-10+j10),p3 =(-10-j10),有一个零点 z1 =(-
(2) 确定 G(s) = K ∗ (s + z)
产生纯虚根为±j1 的z值和 K ∗ 值。
s 2 (s + 10)(s + 20)
解:系统特征方程为 s4 + 30s3 + 200s2 + K *s + K *z = 0 令 s = j1代入特征方程中得:
20,j0)。 起始角:
∑ ∑ θ pi
= (2k
+ 1)π
+
m
ϕ z j pi
j =1
n
−
θ pi pi
j =1
( j≠i)
k = 0,±1,±2,L
θ p1 = 1800
θ p2 = 1800 ϕ + z1p2 θ − p1p2 θ − p3p2 = 1800 + 450 − 1350 − 900 = 00
有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。
分离点坐标计算如下:
1+ 1 = 1 d d + 0.5 d + 1
d 2 + 2d + 0.5 = 0 解方程的 d1 = −1.7 , d2 = −0.29
自动控制原理第二版第四章课后答案

自动控制原理第二版第四章课后答案【篇一:《自动控制原理》第四章习题答案】4-1 系统的开环传递函数为g(s)h(s)?k*(s?1)(s?2)(s?4) 试证明点s1??1?j3在根轨迹上,并求出相应的根轨迹增益k*和开环增益k。
解若点s1在根轨迹上,则点s1应满足相角条件?g(s)h(s)??(2k?1)?,如图解4-1所示。
对于s1= -1+j3,由相角条件?g(s1)h(s1)?0??(?1?j3?1)??(?1?j3?2)??(?1?j3?4)? 0??2??3??6???满足相角条件,因此s1= -1+j3在根轨迹上。
将s1代入幅值条件: g(s1)h(s1?k*?1?1?j3?1??1?j3?2??1?j3?4k8*解出: k=12 ,k=*?324-2 已知开环零、极点如图4-2 所示,试绘制相应的根轨迹。
解根轨如图解4-2所示:4-3 单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ g(s)?ks(0.2s?1)(0.5s?1)k(s?5)s(s?2)(s?3)* ⑵ g(s)?⑶ g(s)?k(s?1)s(2s?1)解⑴ g(s)?ks(0.2s?1)(0.5s?1)=10ks(s?5)(s?2)系统有三个开环极点:p1?0,p2= -2,p3 = -5①实轴上的根轨迹:???,?5?, ??2,0?0?2?57?????a??33②渐近线: ????(2k?1)????,?a?33?③分离点:1d?1d?5?1d?2?0解之得:d1??0.88,d2?3.7863(舍去)。
④与虚轴的交点:特征方程为 d(s)=s3?7s2?10s?10k?0?re[d(j?)]??7?2?10k?0令 ? 3im[d(j?)]????10??0?解得?????k?7。
根轨迹如图解4-3(a)所j)与虚轴的交点(0,?示。
⑵根轨迹绘制如下:①实轴上的根轨迹:??5,?3?, ??2,0?0?2?3?(?5)????0a??2②渐近线: ????(2k?1)????a?22?③分离点: 1d?1d?2?1d?3?1d?5用试探法可得 d??0.886。
第四章控制系统的传递函数

其中,
n
1 T
——环节的 固有频率
To 2
1 T
——环节的 阻尼比
如果0≤ξ<1,二阶环节称为振荡环节
例7 图示是由质量m、阻尼c、弹簧k组成的动力系统. 求G(s)
依动力平衡原理有 Xi(t) k m c
Xo(t)
d 2 xo dxo m 2 c kxo kxi dt dt
因此,系统的传递函数就是系统单位脉冲响应 的拉氏变换。
一般地,传递函数的表达式为
X o ( s) ao s n a1s n1 a2 s n2 an G( s ) X i ( s) bo s m b1s m1 b2 s m2 bm
2. 传递函数的性质
k
k为比例环节的增益或称为放大系数
例1
解
ni(t)
z1
求一对齿轮传动的传递函数 no z1 k ∴G(s)=k ni z2
最基本的运算放大器
no(t)
z2
例2
i 1= i 2
ei ea ea eo R1 R2
ei eo R1 R2
ei
R2 R1 e i2 a Ko a i3 i1 +
ZL=Ls
3.电容元件
dUC iC C dt
ZC(s) = 1/sC
例5
下图是一个由运算放大器组成的积分器, 求G(s)。 C R i + uc 取拉氏变换 uo Ui(s) R
Zc
i
+ Uo(s)
ui
解:
1 uc idt c
I ( s) U c ( s) cs
K s
1 Zc cs
ms2 X o ( s) csX o (s) kXo ( s) kXi (sG( s) 2 ms cs k
自动控制原理第四章2

开、闭环零极点与根轨迹设计
给F(s)增加零点(续)
F(s) =
K
,
s(s + a)(s + b)
C
a > 0, b > a.
z 给F(s)增加零点: s = – c, c > b .
原系统根轨迹的共轭复 根部分向左弯曲
增加零点可以改善系统 的相对稳定程度
12
开、闭环零极点与根轨迹设计
增加开环零点对根轨迹的影响
渐近中心: ? C
有两条复根根轨迹,向右弯曲得更厉害
D
给F(s)增加极点将使根轨迹的 主导部分向右半s平面移动 9
开、闭环零极点与根轨迹设计
给F(s)增加零点
z增加一个实零点:
F (s)
=
K(s + b) ,
s(s + a)
a > 0, b > a.
z增加一对共轭复零点: B
σ
A
原系统根轨迹的共轭复根部分向
F(s)
=
K(s + s2(s +
b) a)
.
图C a = 8.
图D a = 3.
图E
a = b = 1.
极点 s = – a 和 零点 s = – b 相互抵消
分离点式子
s1,2
=
−
a
+ 4
3
± 1 a 2 − 10 a + 9 4
对于 a < 9 无意义
系统退化为二 阶情形,根轨 迹为整个虚轴
17
分离点式子
s1,2
=
−
a
+ 4
3
±
1 4
a2 − 10a + 9
《控制工程基础》第四章习题解题过程和参考答案
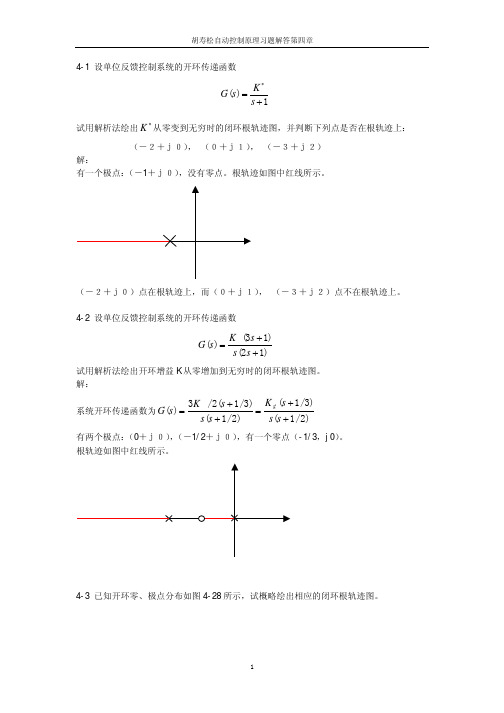
《控制工程基础》第四章习题解题过程和参考答案4-1 设单位反馈系统的开环传递函数为:10()1G s s =+。
当系统作用有下列输入信号时:()sin(30)r t t =+︒,试求系统的稳态输出。
解:系统的闭环传递函数为:10()()11()()1()111C s G s s s R s G s Φ===++这是一个一阶系统。
系统增益为:1011K =,时间常数为:111T =其幅频特性为:()A ω=其相频特性为:()arctan T ϕωω=- 当输入为()sin(30)r t t =+︒,即信号幅值为:1A =,信号频率为:1ω=,初始相角为:030ϕ=︒。
代入幅频特性和相频特性,有:1(1)A ====11(1)arctan arctan5.1911T ωϕω==-=-=-︒所以,系统的稳态输出为:[]()(1)sin 30(1)24.81)c t A A t t ϕ=⋅⋅+︒+=+︒4-2 已知系统的单位阶跃响应为:49()1 1.80.8(0)ttc t e e t --=-+≥。
试求系统的幅频特性和相频特性。
解:对输出表达式两边拉氏变换:1 1.80.8361()49(4)(9)(1)(1)49C s s s s s s s s s s =-+==++++++由于()()()C s s R s =Φ,且有1()R s s =(单位阶跃)。
所以系统的闭环传递函数为:1()(1)(1)49s s sΦ=++ 可知,这是由两个一阶环节构成的系统,时间常数分别为:1211,49T T == 系统的幅频特性为二个一阶环节幅频特性之积,相频特性为二个一阶环节相频特性之和:12()()()A A A ωωω===1212()()()arctan arctan arctanarctan49T T ωωϕωϕωϕωωω=+=--=--4-3 已知系统开环传递函数如下,试概略绘出奈氏图。
(1)1()10.01G s s =+ (2)1()(10.1)G s s s =+(3))1008()1(1000)(2+++=s s s s s G (4)250(0.61)()(41)s G s s s +=+ 解:手工绘制奈氏图,只能做到概略绘制,很难做到精确。
控制系统的传递函数

第二章 控制系统的传递函数
借助表达系统输入、输出之间动态关系的微分方程:
a x (n) no
(t)
...
a x (1) 1o
(t)
a0
xo(t)
b x (m) mi
(t)
...
b x (1) 1i
(t)
b0
xi(t)
可对系统进行描述。
i=0,1…n j=0,1,…m
1、线性定常系统 ai,bj 都不是xo(t)和xi(t)及它们导数的函数,也不 是时间的函数;
第二章 控制系统的传递函数
3、同一控制系统可以有不同的数学模型 同一控制系统具有各种物质运动形式(机械传动、电磁量运动、热
变形等),而不同的物质运动形式又分别受不同的物理规律约束,因而 建立的数学模型可能不同。 因此,建立数学模型时,一定要搞清输入 t
b1s m1 a1s n 1
bm1s bm an1s an
(n>m)
2.3.2 几点说明(性质) (1)传递函数是系统数学模型的又一种形式,也是一种表示输入输出
的模型形式。
它表示了系统本身的特性而与输入信号无关。
它仅能表示输入输出关系,而无法表示出系统的内部结构。
传递函数的分母和分子分别反映系统本身与外界无关的固有特性 和系统同外界之间的联系。
(b)图给出了一种大为简化的悬浮系统,设 p 点的运动 为系统的输入,车体的垂直运
动 为系统的输出,只考虑车体在垂直方向的运动时,求
。
(a)汽车悬浮系统
(b)减化悬浮系统
第二章 控制系统的传递函数
2.3.4 反馈控制系统的传递函数
(解释一下方框图----将系统中各元件的名称或功用写在框图单元中,并标 明它们之间的连接顺序和信号流向。主要用来说明系统的构成和工作原理)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ub(s) R2
ቤተ መጻሕፍቲ ባይዱ
Uo(s) I(s)
C1
C2
I f ( s)
U b ( s) 1 R1 c1s
R c s 1 1 1 1 1 I ( s ) U ( s ) I ( s ) R // b 1 2 c c s c s c s c s s 1 1 2 2 1 1 2 c R
2 d dx o o ⑤ 二阶环节和振荡环节 T x T x Kx o o i 2 dt dt
G(s)
2 K n 2 2 s 2 s n n
⑥ 延时环节
xo (t) = xi (t-τ)
G (s) es
求右图油缸-阻尼-弹簧 系统的传递函数.其中, p为输入,xo为输出。
试画出人工控制的恒温箱原理框图
脑
① 比例环节
xo(t)=kxi(t)
G(s)
Xo (s) Xi (s)
k
小 节
② 微分环节
③ 积分环节
dx i (t) xo(t) T G(s)=TS dt
x ( t) T t) dt G(s)=T/S o i( x
dx K G ( s ) ④ 惯性环节 T o xo Kx i Ts1 dt
第四章 控制系统的传递函数
第二节 复合环节传递函数
一般来说,采用调节器的控制系统,既能获得较高的 静态精度,又具有较快的动态响应。
2014.10.13
1. 复合环节概念
在自动控制技术中,常用到一些被称为调节器(校正器)的 动态元件。他们就是由一些典型环节组成的复合环节。不同 环节的组合,构成各种性能不同的调节器。了解这些调节器 的传递函数,会方便以后的设计。 单一典型环节组合 复合环节,如PI调节器、PD调节器
Zm G( s) Ri
例4
请先行练习
下图是由放大电路组成的PI调节器,求G(s)
在反馈电路中并联了一个积分电路的放大器,各变量已取 拉氏变换。其中,Uf(s)为反馈电压,E(s)为偏差电压。
解
K
U ( s ) KE ( s ) o
Ui(s)
E(s)
UO(s) R
K ( U s ) U s )) i( f(
例2
ui
Ri
a
R1 if
ub R2
C i Ui(s) Ri a
Zm If (s) Uo (s)
uo
Ub (s) I f (s) R1
1 R 1 R cs 1 U s ) I(s ) I(s ) b( 1 R cs 1 1 R 1 cs U(s ) U (s ) b I(s ) o R 2
比例积分环节组成的调节器。
T——时间常数,K——比例系数
1 G (s) K 1 Ts
例3
解
ui(t)
下图是由放大电路组成的PI调节器,求G(s)
R2 Zm Ui(s) R1 C a
Ri
uo (t)
Ri
a
Uo (s)
1 R 1 R2 (R cs 1 )R cs 1 2 Zm=(R1+1/cs)∥R2 1 (R cs R cs 1 ) 1 2 R R 1 2 cs
R
Uf (s) C
U f (s)
R
1 cs
U o (s)
Rcs U ) o(s Rcs 1
1 1 K Rcs 1 G ( s ) 1 1 Rcs Rcs 1 Rcs Ts 1 K Rcs Rcs 1 K
③ PI D调节器 比例、积分、微分环节组成的调节器。
2. 复合环节传递函数
① PD调节器 G(s)=Ts+K
T——时间常数,K——比例系数
根据传递函数判断是何种调节器,并求出相应的参数。
例1
下图是由放大电路组成的PD调节器,求G(s)
在反馈电路中并联了一个积分电路的放大器,各变量已取 拉氏变换。其中,Uf(s)为反馈电压,E(s)为偏差电压。
解
U ( s ) KE ( s ) o
Ui(s)
K
E(s)
UO(s) R
K ( U s ) U s )) i( f(
1 cs
Uf (s)
C
1 U f (s) U (s) U ) o(s 1 o Rcs 1 R
cs
K ( Rcs 1 ) Rcs 1 G ( s ) Rcs 1 Ts 1 Rcs 1 Rcs 1 k 1 K
xo
K A
解
p
dx c o k x o pA dt
csX ( s ) kX ( s ) AP ( s ) o o
X( s ) A G ( s ) o P ( s ) cs K
c
G(s)
K Ts1
求图示液压阻尼器的 传递函数,并判断属于 什么环节
q
R
xo(t)
K
解
A ( p p ) Kx ( t ) 2 1 o
p1
A
p2
dx dx i o q A dt dt p2 p1 dx dx 2 i o q A R Kx o R dt dt
G( s) s K s 2 A R
xi(t)
K X ( s ) s sX s ) o i( A 2 R
1 G (s ) K s 1 1 T T s 2
例4
下图是由放大电路组成的PID调节器,求G(s)
R1
C2
C1
R2
i Ui(s) Ri a
Zm
ui Ri
if
Uo (s)
uO
R1 If (s) C1 Ub(s) R2 C2 Uo(s) I(s)
a
a
R1 If (s)
令
A2 R T K
G(s)
Ts Ts1
求下图的传递函数,并计算ωn 、ξ
L i ZL
ui
R
C
uo
I ( s) Ui(S) Z Uo(S)
ZL=Ls
Z=R//1/cs
2 U ( s ) Z R o n G ( s ) 2 2 2 s 2 s U ( s ) Z Z LRCs Ls R n n i L
a
R1 If (s)
Ub(s) R2 C I(s)
Uo(s)
U o (s) U ( s ) o If ( s ) R R Cs R R Zm 1 2 1 2
Zm G( s) Ri
R R Cs 1 R 2 R 1 2 1 R i 1 R 2 R
② PI 调节器