AB 变频器矢量控制技术及应用
变频器矢量控制

变频器矢量控制在工业自动化领域,变频器是一种重要的设备,广泛应用于电机控制和能源节约等方面。
其中,矢量控制是变频器的一种重要控制方式,它通过精确的电机控制实现了更高效、更稳定的运行。
一、矢量控制的原理和特点矢量控制是一种基于电流的控制方式,它通过分析电机电流的大小和方向来实现对电机的控制。
与传统的频率控制相比,矢量控制具有以下几个特点:1.高精度的转矩控制:矢量控制能够精确地控制电机的转矩输出,无论在低速或高速运行时都能提供较为准确的转矩响应。
这对于需要精确控制转矩的应用场景非常重要。
2.宽速度范围的控制:矢量控制可以实现宽速度范围的无级调速。
无论是低速运行还是高速运行,都可以得到较为稳定的输出。
这对于大部分工业应用来说都是非常关键的。
3.良好的动态性能:矢量控制具有快速的动态响应特点,能够在瞬态变化时快速调整电机输出。
这使得在工业生产中的速度要求较高的应用中,矢量控制展现出了很好的优势。
4.较高的效率和能耗节约:矢量控制通过对电机的精确控制,可以使电机运行在最佳工作点上,从而提高电机的效率,降低能耗。
在能耗节约方面,矢量控制也具有很大的潜力。
二、矢量控制的实现方法矢量控制的实现首先需要获取电机的转速和转矩反馈,以及电机的电流反馈。
然后,将这些反馈信号输入到控制器中,通过控制器对电机的电流大小和方向进行调节。
具体的实现方法有以下几种:1.直接转矩控制(DTC):直接转矩控制是一种基于电机转矩和电流的控制方法,它通过直接控制电机的转矩和磁场实现对电机的控制。
这种方法具有快速动态响应和精确控制的特点,但在低速和零速运行时存在一定的困难。
2.间接转矩控制(FOC):间接转矩控制是一种基于电机磁链和电流的控制方法,它通过控制电机的磁链大小和方向来实现对电机的转矩控制。
这种方法相对于直接转矩控制在低速和零速运行时更为稳定,但对控制器的要求更高。
3.空间矢量调制(SVM):空间矢量调制是一种通过改变电压波形的方式来控制电机的方法。
变频器矢量控制的优点及应用
变频器矢量控制的优点及应用矢量控制原理--应用采用矢量控制方式的通用变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。
由于矢量控制方式所依据的是准确的被控异步电动机的参数,有的通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器。
鉴于电机参数有可能发生变化,会影响变频器对电机的控制性能,并根据辨识结果调整控制算法中的有关参数,从而对普通的异步电动机进行有效的矢量控制。
异步电动机矢量控制变频调速系统的开发,使异步电动机的调速可获得和直流电动机相媲美的高精度和快速响应性能。
异步电动机的机械结构又比直流电动机简单、坚固,且转子无碳刷滑环等电气接触点,故应用前景十分广阔。
现将其优点和应用范围综述如下:1、矢量控制系统的优点:动态的速响应直流电动机受整流的限制,过高的di/dt是不容许的。
异步电动机只受逆变器容量的限制,强迫电流的倍数可取得很高,故速度响应快,一般可达到毫秒级,在快速性方面已超过直流电动机。
低频转矩增大一般通用变频器(VVVF控制)在低频时转矩常低于额定转矩,在5Hz以下不能带满负载工作。
而矢鱿控制变频器由于能保持磁通恒定,转矩与it呈线性关系,故在极低频时也能使电动机的转矩高于额定转矩。
控制的灵活性直流电动机常根据不同的负载对象,选用他励、串励、复励等形式。
它们各有不同的控制特点和机械特性。
而在异步电动机矢量控制系统中,可使同一台电动机输出不同的特性。
在系统内用不同的函数发生器作为磁通调节器,即可获得他励或串励直流电动机的机械特性。
使用矢量控制,可以使电机在低速,如(无速度传感器时)1Hz(对4极电机,其转速大约为30r/min)时的输出转矩可以达到电机在50Hz供电输出的转矩(最大约为额定转矩的150%)。
对于常规的V/F控制,电机的电压降随着电机速度的降低而相对增加,这就导致由于励磁不足,而使电机不能获得足够的旋转力。
变频器矢量控制原理、应用及要求

变频器矢量控制原理、应用及要求早在上世纪七十年代就有工程师提出了矢量控制理论,解决了交流电机转矩控制的问题。
但对于变频器矢量控制原理是什么,很多人就不知道了,下面环球自动化网小编就为大家带来变频器矢量控制原理及应用详细分析。
变频器矢量控制原理:矢量控制的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流) 和产生转矩的电流分量(转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
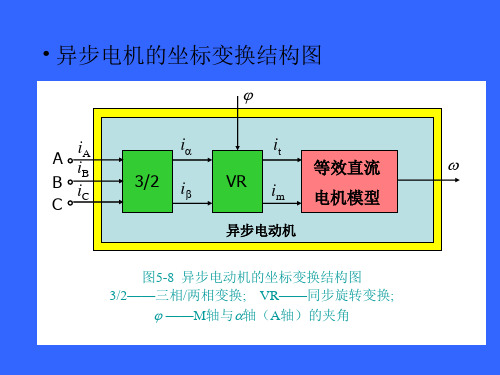
矢量控制变频调速的具体步骤:1)将交流电机等效为直流电机:将交流电机的三相定子电流ia、ib、ic通过三相-二相变换转换为静止坐标系下的交流电流ia1、ib1;2)对速度、磁场两个分量进行独立控制:将静止坐标系下的交流电流ia1、ib1通过磁场定向旋转变换转换为旋转坐标系下的直流电流im1、it1,其中,im1即等效为直流电动机的励磁电流,it1即等效为与转矩成正比的电枢电流;3)对直流电机进行变频调速控制:根据直流电动机的控制方法求得直流电动机的控制量;4)坐标反变换还原为对交流电机的控制:根据上述一二步骤的坐标变换进行相应的坐标反变换,将直流电流转换为交流电流,再转换为三相定子电流以完成对交流电动机的矢量控制。
变频器矢量控制实现:矢量控制基本理念旋转地只留绕组磁场无论是在绕组的结构上,还是在控制的方式上,都和直流电动机最相似。
设想,有两个相互垂直的支流绕组同处于一个旋转体中,通入的是直流电流,它们都由变频器给定信号分解而来的。
经过直交变换将两个直流信号变为两相交流信号;在经二相、三相变换得到三相交流控制信号;结论只要控制直流信号中的任意一个,就可以控制三相交流控制信号,也就控制了交流变频器的交流输出。
矢量控制变频器应用
β
q iβ iq
ϕ
ωs
Fs
ϕ id
iqcosϕ idsinϕ iqsinϕ
d
iα idcosϕ
α
图5-4 两相静止和旋转坐标系与磁动势(电流)空间矢量
• 2s/2r变换公式
iα = id cos ϕ − iq sin ϕ
iβ = id sin ϕ + iq cos ϕ
• 两相旋转—两相静止坐标系的变换矩阵 写成矩阵形式,得 iα cos ϕ − sin ϕ id id i = i = C2r / 2s i (5-8) β sin ϕ cos ϕ q q 式中
风机负载和泵类负载的负载特性
流量Q ∝ n 扬程H ∝ n2 功率P ∝ n3
变频器在潜水泵上的应用
潜水泵起动时的水锤现象往往容易造成管道松动或破裂甚至损坏; 电机起动/停止时需开启/关闭阀门来减小水锤的影响,如此操作一方面 工作强度大,且难以满足工艺的需要。 在潜水泵安装变频调速器以后,可以根据工艺的需要,使电机软启/软 停,从而使急扭及水锤现象得到解决。而且在流量不大的情况下,可以降低 泵的转速,一方面可以避免水泵长期工作在满负荷状态,造成电机过早的老 化,而且变频的软启动大大的减小水泵启动时对机械的冲击。并且具有明显 的节电效果。
设磁动势波形是正弦分布的,当三相总磁 动势与二相总磁动势相等时,两套绕组瞬时 磁动势在 α、β 轴上的投影都应相等,
1 1 N2iα = N3iA − N3iB cos60° − N3iC cos60° = N3 (iA − iB − iC ) 2 2
3 N 2iβ = N 3iB sin 60° − N 3iC sin 60° = N 3 (iB − iC ) 2
AB变频器使用说明
AB变频器使用说明AB变频器使用说明本文档涉及附件:附件1:AB变频器安装指南附件2:AB变频器维护手册1、引言AB变频器是一种电力控制设备,用于控制交流电动机的速度和转矩。
本文档旨在提供AB变频器的详细使用说明,帮助用户正确、安全地操作AB变频器。
2、产品概述AB变频器是一种高性能的电力控制设备,采用先进的变频控制技术,能够使交流电动机实现平稳、高效的速度调节。
AB变频器具有以下特点:- 广泛的应用领域:AB变频器可以适用于各种类型和功率的交流电动机控制。
- 高精度的速度调节:AB变频器通过精确的电流和频率调节,能够实现对电机的精确控制。
- 多种保护功能:AB变频器内置多种保护功能,如过载保护、短路保护等,保证设备的安全运行。
3、安装与调试3.1 安装步骤:1) 将AB变频器与电动机适配,确保连接稳固。
2) 连接变频器的电源线,注意接线正确、牢固。
3) 连接控制信号线,确保与控制系统正常连接。
4) 接地变频器,确保安全接地。
5) 检查所有连接,确保无松动或接触不良。
6) 开始通电测试,确保变频器正常工作。
3.2 调试步骤:1) 设置变频器的初始参数,如额定电流、额定频率等。
2) 调节变频器的控制方式,如速度闭环控制、矢量控制等。
3) 进行电机的定子参数自整定,确保电机参数准确。
4) 逐步调整电机的速度设定值,观察性能是否正常。
5) 调试完毕后,保存参数设置,并进行最终测试。
4、操作说明4.1 主界面介绍:AB变频器的主界面分为以下几个部分:- 参数调节区:用于调节AB变频器的工作参数,如电流、频率等。
- 运行状态区:显示电机的运行状态,如电流、转速等。
- 错误报警区:当发生错误或故障时,会在该区域显示相应的报警信息。
4.2 操作流程:1) 打开AB变频器电源开关,待变频器启动后,进入主界面。
2) 根据需要,调节参数调节区的参数,如设定电流、频率等。
3) 启动按钮,开始电机的运行。
4) 在运行过程中,可以根据需要进行参数调整或停止电机运行。
变频器的原理及矢量控制的应用(正式)

变频器的原理及矢量控制的应用设备部李国栋摘要:本文介绍了变频器基本原理。
并从实际应用出发,介绍了变频器的各种应用模式。
对变频器矢量控制模式的控制特点、电机参数的自学习,实际生产中的应用做了较祥细的论述。
变频器是电力电子技术,微电子技术,电机控制理论及自动控制技术高度发展的产物。
如今,交流变频调速逐渐成为电气传动的主流,主要用于控制异步电动机的转速和转矩,不仅扩大了电动机的转速调节范围,使电动机转速能够从零速到高于额定转速的范围内变化,而且具有动态响应,工作效率高,输出特性好,使用方便等其它调速方案所无法比拟的特长。
加上交流电动机对环境适应性强,维修简单,价格低,容易实现高速大容量的优势,使得以前直流电动机占主要地位的调速传动领域,正逐渐被交流电动机变频调速所取代。
本文通过对变频器原理和变频器矢量控制原理的阐述,使大家从理论上对变频器的矢量控制有一个比较全面的认识。
并结合自身的工作实践,描述分析了变频器矢量控制在实际生产中的应用,提高大家对变频器矢量控制特点的认识。
一、交流电动机的转速表达式n=n 转速r/minƒ1 定子供电频率HzP 磁极对数S 转差率由上式可以归纳出交流电动机的3种调整方法:改变极对数P调整,改变转差率S调速和改变电源频率调速。
改变磁极对数调速是有级的调速,转速不能连续调节。
变转差率调速时,不调同步转速(即不改变电源频率)而是通过调节定子电压U1,转子电阻R2或采用电磁离合器来实现,存在着低速时,转差损耗较大,效率低的缺点。
变频调速采用调节同步转速(即改变三相异步电动机的电源频率),可以由高速到低速保持有限的转差率,效率高,调速范围宽,精度高,是三相异步电动机比较理想的调速方案。
实际应用中,变频器采用了调压调频技术,即在改变输出频率的同时改变输出电压。
因为单纯的改变输出电压的频率,并不能正常调速。
三相交流电机的转矩公式Te =C m φm I 21COS φ2 Te :电磁转矩C m :转矩常数φm :主磁通量(Wb)I 21:转子电流折算到定子侧的有交值(A )COS φ2:转子电路的功率因数而三相交流电机的主磁通φm ≈U 1 定子相电压 vƒ1 定子相电压频率 HzN 1 定子每相绕组串联的匝数K 绕组系数由上式可见,如果只改变ƒ1调速,当ƒ1上升,φm 下降,则拖动转矩Te 下降,这样电动机的拖动能力会降低,对于恒转矩负载会因拖不动而堵转。
变频器矢量控制的应用
变频器矢量控制的应用作者:李国栋来源:《数字化用户》2013年第15期【摘要】本文从实际应用出发,对变频器矢量控制模式的特点和调试进行了较祥细的论述。
【关键词】变频调速矢量控制在实际生产中变频器采用了调压调频技术,通过调整输出到电动机定子绕组上的电压幅度大小和电压频率高低来实现不同控制模式的调速方式。
1.变频器控制输出的电压幅度和电压频率的比值为常数时,基本实现恒磁通、恒转矩运行。
但在低频时的转差率增加,最大扭矩下降;高频时,转差率减小,转矩基本恒定。
2.输出功率不变的方式,即电动机的转速上升,输出扭矩下降:电压频率超过电动机的额定频率时,频率继续上调时,电压幅度不能够超过额定电压,导致主磁通因电压频率上升而下降,输出的转矩下降,出现近似恒功率的状态。
3.采用矢量运行方式,在整个变速范围内,有效的控制输出转矩和转差率,调速效果接近直流电动机调速:变频器在给定值改变或者负载有明显变化时,能够更好的控制转速变化;尤其是输出给定子绕组的电压频率在较低范围时,转子的旋转速度相应的变得较慢,采用该运行模式,输出转矩可以得到更好的控制,转差率也能够和电压频率较高时的转差率基本一致;在转子完全静止时,也能够输出额定转矩。
变频器在矢量运行模式时,按照有没有采用转速反馈,可以采取两种控制方式:回转系统带旋转编码器的类型和不带旋转编码器的类型。
下面接合某生产线变频驱动设备的调试过程,描述变频器矢量控制的特点和调试要求。
某生产线,由三条带式传送设备前后串联组成。
前端的是铺装预压机,中部是板坯运输给料机,后部是压制成型机。
这三部分由不同的厂家制造,也配套了不同的变频器驱动系统。
1.铺装预压机采用OMRON 3G3RV—B4450 45KW变频器驱动普通45KW三相异步电动机。
采用无传感器矢量控制,频率给定方式:由压制成型机提供的4-20mA模拟量信号为主,以手动微调电位器0-10V模拟量信号为辅。
电动机的输出轴采用带传动把动力输送到摆线针轮减速机的输入轴,其输出轴的转速大幅度下降,扭矩大幅度上升,通过刚性联轴器驱动铺装皮带的主动带轮。
变频器矢量控制原理及应用袁毓金
变频器矢量控制原理及应用袁毓金发布时间:2021-09-30T06:42:33.288Z 来源:《中国科技人才》2021年第19期作者:袁毓金[导读] 本文基于实例描述了变频器标量控制与矢量控制之间的不同点,并在实际应用中描述了变频器矢量控制的应用模式和控制方法。
瓮福紫金化工股份有限公司福建省龙岩市 364204摘要:本文基于实例描述了变频器标量控制与矢量控制之间的不同点,并在实际应用中描述了变频器矢量控制的应用模式和控制方法。
同时本文还介绍了变频器矢量控制模式的控制的特点、电机辨识功能这两方面的内容。
关键词:变频器;矢量控制在过去几年里,随着电子电气、计算机和自动化控制技术的不断更新,交流传动以及控制技术脱颖而出,成为了发展最快的一项技术,电气传动技术开启了历史性的变革,现阶段最为火热的技术就是交流调速。
电机交流变频技术的运用,大大节省了电力、精进了工艺流程,最终使得产品质量大大提高。
一变频调速系统的标量控制现阶段,比较好掌握的一类变频器为 V/F 控制,它可以理解为一种电压发生模式装置,主要功能就是对针对调频过程中不同的电压模式进行调节,主要采用设置不同的变化模式来完成调节的要求。
一般以有线性 V/F 控制以及平方 V/F 控制这两种控制方式为主。
而标量控制有明显的缺点在于,当处于低频率的时候,转矩较少需要进行提升才能满足使用要求,速度稳定性差的缺陷,所以,在重载设备使用的时候,由于这些缺陷被弃之不用。
二变频调速系统的矢量控制矢量控制改善了交流电动机电磁转矩的有效控制,异步电动机和他励直流电机有着一样的控制标准,其可以达到非常优越的动、静态调速特性,从而让交流电动机高性能发挥出来,所以,矢量控制也能够理解为解耦控制以及矢量变换控制。
根据两种控制方式不同的发展表现我们可以了解到,矢量控制将不再使用标量控制,其转变为了交流电动机传动系统参照的工业标准控制技术。
(一)矢量控制的概念在同样的旋转磁场的条件下,并以此为参考依据,在三相坐标系上的定子交流电流要进行三相/两相变换程序,其等同于两相静止坐标系上的交流电流,然后进行同步旋转变换,这个过程相当于是同步旋转坐标系上的直流电流 im 和 it输入为 A、B、C 三相电压,输出为转速 ω,是一台异步电动机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AB 变频器矢量控制技术及应用
摘要:FORCE 技术是指磁场定向控制,其可以独立控制电机的磁
通量和转矩电流来实现精确的转矩和速度,它采用专利型的频宽的电流调节技术,加上自适应的控制器可以对电动机的磁通量和转矩进行分离和控制,可作到调速范围1000:1,调节精度0.001%。
关键词:磁场定向控制自整定参数设置
目前在高性能的交流调速领域主要有矢量控制和直接转矩控制
两种。
对于直接转矩控制来说,其基本思想是在准确观测定子磁链的空间位置和大小并保持其幅值基本恒定以及准确计算负载转矩的条件下,通过控制电机的瞬时输入电压来控制电机定子磁链的瞬时旋转速度,来改变它对转子的瞬时转差率,达到直接控制电机输出的目的。
而矢量控制以FORCE 技术为代表,是指磁场定向控制,其可以独立控制电机的磁通量和转矩电流来实现精确的转矩和速度,它采用专利型的频宽的电流调节技术,加上自适应的控制器可以对电动机的磁通量和转矩进行分离和控制,可作到调速范围1000:1,调节精度0。
001%,转矩调整率2%,真正无与伦比。
性能远超过直流调速器。
现在不同品牌变频器采用控制方式各不相同,以AB 为代表的
为 FORCE 技术矢量控制,而ABB 为DTC 直接转矩控制。
本文主要阐述AB 的FORCE 矢量控制方式下电机的自学习功能及其
变频器模拟量给定频率的相关参数的应用设定
AB 变频器的矢量控制分为SENSORLESS 和FORCE 两种:
SENSORLESS 无速度反馈矢量控制是通过对电流检测来模拟速度量,从而确定在该速度下的转距电流和磁通电流,作到自动的转矩补偿。
这种技术是建立在电机模型基础上的。
具有自动测定电机感抗和阻抗的功能。
它的转矩补偿精度不够高。
要实现矢量控制功能,必须根据电动机自身的参数进行一系列等
效变换的计算。
而进行计算的最基本条件,是必须尽可能多地了解电动机的各项数据。
因此,把电动机铭牌上的额定数据以及定、转子的参数输入给变频器,就是实现矢量控制的必要条件。
一、自动检测功能
进行矢量控制时,所需数据中的相当部分,一般用户是很难得到的。
这给矢量控制的应用带来了困难。
对此,当代的许多变频器都已经配置了自动检测电动机参数的功能。
但检测的具体方法,各种变频器不尽相同。
自动检测功能的英语名称是auto-tuning, 故有的变频器直译为
“自动调谐”功能, 也有的称之为“自学习”功能。
二、自动检测方法举例
以AB 变频器PowerFlex 700S 为例,其相关步骤如下:
1、电动机数据
1)从HIM 上的主菜单进入Start-up,如果上次的Start-up 没有完成,选择Start Over
2)现在变频器询问你是否要仿照PowerFlex 700 变频器的Start-up。
选择否后点击确定。
3)选择Motor Cnfg/Tests。
阅读显示屏上的文字,并且点击确定。
此时HIM 显示的信息表示在Motor Cnfg/Tests 的过程中,HIM 将是起动/停止源。
点击确定继续Start-up 历程。
4)选择Motor Cnfg/Data,并点击确定。
5)现在进入了选择控制模式的菜单。
选择FOC 控制方式。
这是PowerFlex 700S Phase II 变频器原矢量控制方式。
6)输入电动机的额定数据。
7)对于动态制动的配置,选择none。
这表明没有动态制动电阻或者没有其他方式消耗再生能量。
当选择none 时,总线调节器自动投入以防止过电压错误。
(2)电动机测试
1)按照顺序执行电动机测试。
首先选择反馈配置。
当反馈丢失时,设置变频器报错并惯性停车。
设置编码器0 的PPR(例1024PPR)2)执行电源诊断测试。
在这项测试中,需要在HIM 上起动变频器。
当测试完成时点击stop 键。
3)执行方向测试。
这项测试用于检查电动机的转动方向是否正确。
如果当前电动机转动的方向不是正向,选择no,然后根据变频器提示是否要用逻辑方式更改电机旋转方向,选择Yes, 再次测试电动机旋转方向,此时电动机应该以另一个方向旋转。
4)执行电动机的Auto-turn。
这项工作可以测量电动机的特性。
此时电动机必须脱开负载选择rotate tune。
如果负载不能脱开,那么用
户可以执行static tune。
Static tune 测量除磁通电流以外的其他电动机
特性,而变频器会根据电动机的数据计算出磁通电流。
5)执行惯量测试。
惯量测试通常要在连接了负载的电动机上执行。
变频器会提示你输入速度调节器的带宽参数。
该参数可以设置为
10rad/s。
6)通过HIM 给变频器一个起动信号,变频器自动进入惯量测试,
惯量测试完成后退出电动机测试菜单。
(3)速度限制
1)设置正向速度限制为2000r/min,反向速度限制为-2000r/min。
设置绝对超速为变频器的出厂默认值。
2)完成速度限制设置后,退出Motor Cnfg/Tests 菜单。
(4)速度给定
1)在Startup 菜单中,选择Application Cnfg。
2)选择Speed Control。
设置+/- Speed Reference 来控制方向。
+/- Speed Reference 意味着变频器可以接受正向或者反向的速度给定值。
该给定值可以来自模拟量输入,预置速度,或者网络。
3)选择数字量输入。
选择3 线控制。
设置正常停车为斜坡停车。
4)设置相应使用的数字量组态。
5)从Application Cnfg 菜单中退出。
6)从Assisted Starup 历程中退出。
经过以上步骤就完成了PowerFlex 700S Phase II 的自整定过程。
按ESC 键退出到HIM 的主显示画面,上面显示速度、输出频率、直流母线电压。
注:以上自调节过程还可以通过相关参数完成
例 P153 Bit 25=1 自调节测试使能
Bit 30=1 、Bit 31=1 系统惯量测试使能
下面以某轮胎制造厂PowerFlex 700S Phase II 开炼机上的应用。
该厂所用开炼机电机380V /250KW / 520A ,所选变频器为PowerFlex 700S Phase II(20DC590N0ENNBNANE)。
应用描述:频率参考值由模拟量输入控制采用3 线制电动机带正反向运行。
变频器输入联接状态:
Inputs Function Description
DI1 Start
DI2 Stop
DI3 Reverse
DI4 NA
DI5 NA
DI6 NA
AI1 Speed Reference 0-10v
AI2 NA
变频器参数设定:
Par. Name Value Link Description
153 Control Options b0 = 1
b6 = 1
b8 = 1
Bipolar SRef
Stop in Torq –Stop function if in torque control mode 3WireControl
10 Speed Ref 1 800 Base Speed reference
0-10v
11 SpdRef1 Divide 1
27 Speed Ref A
Sel
1 Speed Ref 1]
30 [Min Spd Ref Lim
-888
31 [Max Spd Ref Lim
888
32 Accel Time 10
33 Decel Time 10
75 Rev Speed Limit -980
76 Fwd Speed Limit 980
168 Normal Stop Mode 0 Ramp Stop
821 Analog I/O Units
Bit0=0 AI1=0—0V
825 Dig In1 Sel
5 Start
826 Dig In2 Sel
4 Stop-CF
827 Dig In3 Sel
6 Reverse
802 Anlg In1 Scale
0.1
803 Anlg In1 Offset
804 AI 1 Filt Gain
1
805 Anlg In1 Filt BW
P10=P800/P11=(P801*P802)/P11
例:模拟量输入5V 时,对应电机转速为
P10=5*0.1/1=0.5
P10*P31=0.5*888=444RPM
结束语
本文主要对AB 的PowerFlex 700S 矢量型变频器的控制应用进行了
介绍,仅供相关技术人员参考。
__。