根轨迹法的基本概念
自动控制原理 第四章根轨迹

第四章根轨迹法4-1 根轨迹法的基本概念4-2 常规根轨迹的绘制法则4-3 广义根轨迹4-1 根轨迹法的基本概念一、根轨迹的概念根轨迹:系统中某个参数从零到无穷变化时,系统闭环特征根在s平面上移动的轨迹。
根指的是闭环特征根(闭环极点)。
根轨迹法是根据开环传递函数与闭环传递函数的关系,通过开环传递函数直接分析闭环特征根及系统性能的图解法。
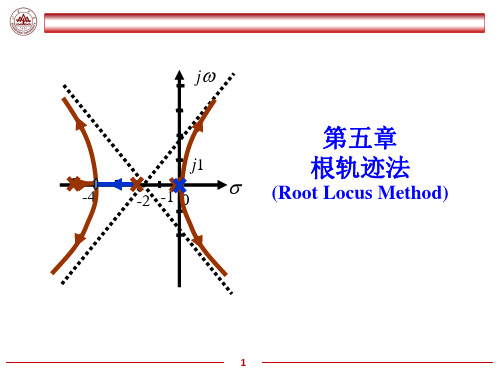
K =0 s 1=0 s 2=-40 < K <1s 1 s 2为不等的负实根K =1s 1=-2 s 2=-21 < K < ∞s 1s2 实部均为-2由根轨迹可知:1)当K =0时,s 1=0,s 2=-1,这两点恰是开环传递函数的极点,同时也是闭环特征方程的极点.2)当0<K < 1 时,s 1,2都是负实根,随着k 的增长,s 1从s 平面的原点向左移,s 2从-1点向右移。
3) 当K = 1时, s 1,2= -2,两根重合在一起,此时系统恰好处在临界阻尼状态。
4) 1 <K <∞,s 1,2为共轭复根,它们的实部恒等于-2,虚部随着K 的增大而增大,系统此时为欠阻尼状态。
★在s平面上,用箭头标明K增大时,闭环特征根移动的方向,以数值表明某极点处的增益大小。
有了根轨迹图就可以分析系统的各种性能:(1)稳定性:根轨迹均在s的左半平面,则系统对所有K>0都是稳定的。
(2)稳态性能:如图有一个开环极点(也是闭环极点)s=0。
说明属于I型系统,阶跃作用下的稳态误差为0。
在速度信号V0t作用下,稳态误差为V0/K,在加速度信号作用下,稳态误差为∞。
(3)动态性能:过阻尼临界阻尼欠阻尼K越大,阻尼比ξ越小,超调量σ%越大。
由此可知:1、利用根轨迹可以直观的分析K的变化对系统性能的影响。
2、根据性能指标的要求可以很快确定出系统闭环特征根的位置;从而确定出可变参数的大小,便于对系统进行设计。
由以上分析知:根轨迹与系统性能之间有着密切的联系,但是,高阶方程很难求解,用直接解闭环特征根的办法来绘制根轨迹是很麻烦的。
根轨迹法

根轨迹法一、定义:〈①〉()()()01111*0=+++=+∏∏==nj imi ip s z s Ks G 。
其中*K 为根轨迹增益。
开环放大倍数∏∏===nj jmi ipzKK 11*闭环特征方程的根随参数*K 而变化的轨迹,称为根轨迹。
其符合两个条件:()()()()⎪⎩⎪⎨⎧=∠+=∠=非最小相位系统或最小相位系统相角条件:幅值条件:,2,121000ππk s G k s G s G〈②〉几条规则:①实轴上的根轨迹〈最小相位系统〉右边有奇数个零极点时,有根轨迹 〈非最小相位系统〉右边有偶数个零极点时,有根轨迹 ②根轨迹条数=Max (n,m ),起点为开环极点(0=g K ),终点为开环零点(∞→g K )③渐进线条数:(n-m )条,与实轴交点坐标:mn --=∑∑零点极点1σ与实轴夹角:()mn k -+±=πϕ121。
④分离点与会合点:使0*=dsdK ,并使*K >0的点 ⑤复数极点出射角:∑∑-+︒=量辐角其他极点至该极点的向零点至极点的向量辐角1801p θ对非最小相位系统∑∑-='量辐角其他极点至该极点的向零点至极点的向量辐角1p θ 复数零点的入射角:∑∑+-︒=角极点至该零点的向量辐量辐角其他零点至该零点的向1801z θ对非最小相位系统∑∑+-='角极点至该零点的向量辐量辐角其他零点至该零点的向1z θ⑥与虚轴交点:(a )用劳斯判据确定,用辅助方程求得(b )ωj s =代入闭环特征方程,由实部=0,虚部=0求得例1:()()()210++=s s s Ks G解:渐进线(3条):()()10321-=--+-=σ,()πππϕ,3312=+±=k由()()0211=+++s s s K,则()()21++-=s s s K ,()()026323223*=++-=++-=s s dsss s d ds dK ,得 ⎩⎨⎧-=-==-=385.0,577.1385.0,423.0*22*11K s K s 与虚轴的交点:方法一02323=+++K s s s ,劳斯阵:Ks K sKs s 0123323021-要与虚轴有交点,则有一行全零,即6032=⇒=-K K辅助方程:j s s 20632,12±=⇒=+ 方法二将ωj s =代入特征方程:()()()02323=+++K j j j ωωω2,60320332==⇒=-=-ωωωωK K 虚部:实部:,则与虚部的交点6,22,1=±=K j s 根轨迹如下图例2:()()32220+++=s s s K s G 解:渐进线一条。
第四章 (1)根轨迹法(基本概念)
l
K
* H
(s z j )
H (s)
j 1 h
(s p j )
j 1
K
* H
— 反馈通路的根轨迹增益
f
l
K *
(s zi )
(s z j )
G(s)H (s)
i 1
q
j 1 h
(s pi ) (s p j )
i 1
j 1
K*
K
* G
K
* H
— —开环根轨迹增益
z(i i 1,,f)— 前向通路传递函数的零 点
点处的K值,就是临界稳定的开环增益Kc。 2.稳态性能 开环系统在坐标原点有一个极点,
所以属Ⅰ型系统,因而根轨迹上的K值就是静态
速度误差系数。
如果给定系统的稳态误差要求,则由根轨迹图
确定闭极点位置的允许范围. K
如何分析系统性能?
3.动态性能:当 K>1时,所有闭环极点
均位于实轴上,系统为过阻尼系统,其单位 阶跃响应为单调上升的非周期过程。
另一个问题是,通过解方程求得的闭环 极点,是在系统参数一定的情况下求得的。 但当系统中的参数变化时,如开环增益K变化 时,又得重新解方程求根,因而很不方便。
为了解决以上问题,1948年,伊万斯提 出了控制系统分析设计的根轨迹法。
这种方法是根据反馈控制系统的开环、闭 环极点传递函数之间的关系,根据一定的准 则,直接由开环传递函数的零、极点,求出 闭环极点。从而,比较容易的得到系统的性能.
z j ( j 1,,l) — 反馈通路传递函数的零 点
引言
A.闭环系统的稳定性和动态性能 取决于闭环极点特征方程的根。
B.当待定参数变化时特征根随之变 化,这个根的变化轨迹就形成根轨迹。
自动控制原理 第四章 根轨迹法
第4章 根 轨 迹 法根轨迹法是分析和设计线性控制系统的图解方法,使用简便,在控制工程上得到了广泛应用。
本章首先介绍根轨迹的基本概念,然后重点介绍根轨迹绘制的基本法则,在此基础上,进一步讨论广义根轨迹的问题,最后介绍控制系统的根轨迹分析方法。
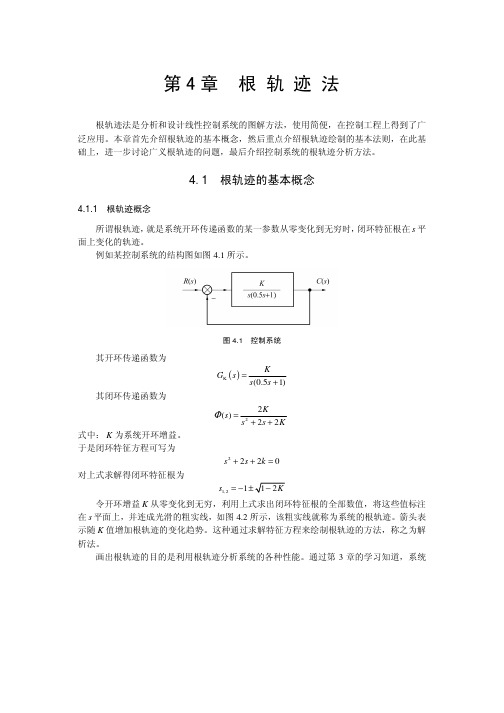
4.1 根轨迹的基本概念4.1.1 根轨迹概念所谓根轨迹,就是系统开环传递函数的某一参数从零变化到无穷时,闭环特征根在s 平面上变化的轨迹。
例如某控制系统的结构图如图4.1所示。
图4.1 控制系统其开环传递函数为()K (0.51)KG s s s =+其闭环传递函数为22()22Ks s s KΦ=++式中:K 为系统开环增益。
于是闭环特征方程可写为2220s s k ++=对上式求解得闭环特征根为1,21s =−令开环增益K 从零变化到无穷,利用上式求出闭环特征根的全部数值,将这些值标注在s 平面上,并连成光滑的粗实线,如图4.2所示,该粗实线就称为系统的根轨迹。
箭头表示随K 值增加根轨迹的变化趋势。
这种通过求解特征方程来绘制根轨迹的方法,称之为解析法。
画出根轨迹的目的是利用根轨迹分析系统的各种性能。
通过第3章的学习知道,系统第4章 根轨迹法·101··101·特征根的分布与系统的稳定性、暂态性能密切相关,而根轨迹正是直观反应了特征根在复平面的位置以及变化情况,所以利用根轨迹很容易了解系统的稳定性和暂态性能。
又因为根轨迹上的任何一点都有与之对应的开环增益值,而开环增益与稳态误差成反比,因而通过根轨迹也可以确定出系统的稳态精度。
可以看出,根轨迹与系统性能之间有着比较密切的联系。
图4.2 控制系统根轨迹4.1.2 根轨迹方程对于高阶系统,求解特征方程是很困难的,因此采用解析法绘制根轨迹只适用于较简单的低阶系统。
而高阶系统根轨迹的绘制是根据已知的开环零、极点位置,采用图解的方法来实现的。
下面给出图解法绘制根轨迹的根轨迹方程。
自动控制第五章根轨迹法
15
绘制根轨迹的规则
【例5-2】已知负反馈系统的开环传递函数为:
解:(1)根轨迹的分支数和对称性 开环极点分别为: 系统的根轨迹有三条分支 (2)根轨迹的起点与终点 起始于系统的三个开环极点,并趋向于无穷远处
K1 Kb
j Kc
K1
(3)根轨迹的渐近线
Kc K1
16
绘制根轨迹的规则
闭环特征根s1,s2 随着K1值得 改变而变化。
(1) K1= 0:s1 = 0,s2 = 2,是根轨迹的起点,用“”表示。 j K1 (2) 0 < K1<1 :s1 ,s2 均是负实数。 K1 s1 ,s2 。 s1从坐标原点开 始沿负实轴向左移动; s2从(2, K1= 0 K1= 0 K1=1 j0)点开始沿负实轴向右移动。 1 0 2 (3) K1= 1: s1 = s2 = 1,重根。
+
﹣
K s(0.5s+1)
C(s)
式中,K为系统的开环比例系数。 K1 = 2K 称为系统的开环 根轨迹增益。
系统的闭环传递函数为:
K1 ( s) 2 s 2s K1
系统的闭环特征方程为: s2 + 2s + 2K1 = 0
4
一、根轨迹
用解析法求得系统的两个闭环特征根为:
s1,2 1 1 K1
K1
分离角为:
Kb
Kc K1
17
绘制根轨迹的规则
一般情况下,如果根轨迹位于实轴上相邻的开环极点之间, 则在这两个极点之间至少存在一个分离点;同样,如果根 轨迹位于实轴上两个相邻的开环零点之间(其中一个可在 无穷远处),则这两个零点之间至少存在一个汇合点。
控制工程基础第4章 根轨迹法
n 3, m 0, 故三条根轨迹趋向处。
渐进线与实轴交点的坐标为
[S]
a
0
1
3
2
0
1
渐进线与实轴正向的夹角为
a -2 -1 0
a
2k
1180
3
60 , 180
六、根轨迹的起始角与终止角
起始角:起始于开环极点的根轨迹在起点 处的切线与水平线正方向的夹角。
终止角:终止于开环零点的根轨迹在终点 处的切线与水平线正方向的夹角。
s4
2
1
s3 -2 s20 s1
s3 180 , s3 2 180 s4 1, s4 2 2
若s4位于根轨迹上,则必满足
幅角条件,即1 2 180,
N
s4一定在 2,0的中垂线MN上。
利用幅值条件可算出各根轨迹上的 K 值。
例
Gs
K
s0.5s 1
2K
ss 2
K
ss 2
终止于 zb 的根轨迹在终点处
的切线与水平正方向的夹角
j 1
i 1
ib
其它零点到 zb 的向量夹角
七、分离点的坐标
几条根轨迹在[S]平面上相遇后又分开的点, 称为根轨迹的分离点(或会合点)。
分离点坐标的求法:
1 d (G(s)H (s)) 0
ds
2 由根轨迹方程
令:dK 0 解出s ds
n
1 180 p1 z p1 p2
180 116.57 90
206.57
由于对称性
2 206.57
会合点 -3
206.57
p1
[S]
z116.57
2.12
-2 -1 0
根轨迹的基本概念

m
n
上述两式称为满足根轨迹方程(kg>=0)的幅值条件和相角条件。
当根轨迹增益kg<0时:
根轨迹方程可写为:
| kg | s z j
j 1
m
s p
i 1
m j 1
n
e
n m j ( s z j ) ( s pi ) i 1 j 1
的旁边。
根轨迹的两种类型:
180o等相角根轨迹:复平面上所有满足相角条件式(kg>=0)
的点连成的曲线,称为180o等相角根轨迹,简称根轨迹。 0o等相角根轨迹:复平面上所有满足相角条件式(kg<0)的 点连成的曲线,称为0o等相角根轨迹。
这样,当根轨迹增益从kg=0到kg=±∞变化时,根据根轨
称 Gk (s) 1 或 k ×
g
(s z ) (s p )
j1
j
m
i1 n
i
1
为负反馈系统根轨迹方程
4.1.2
根轨迹的幅值和相角条件
当根轨迹增益kg>=0时: 根轨迹方程可写为:kg s Nhomakorabea z j
j 1
m
kg
1
(s z )
i
m
s p
i 1
不满足相角条件,所以点B不是根轨迹上 的点。
Im
B A
A2
p2
s2
s
A1
p1
Re
利用幅值条件在根轨迹上确定特定点的根轨迹增益kg
上例中,若A点的坐标是-1+j1,则根据幅值条件:
kg s( s 2) s 1 j1
1 , kg 2
自动控制原理4 根轨迹法的基本概念

K*
K* 8.16
1.1
pi 71.6
例子4-5 P150
解:1) m=1,n=3,
z1=-20,p1=0,p2=p3=-12, 2)实轴上0--12 ,-12--20 必为根轨迹。 3)渐近线。n-m=2 故有2条渐近线.
G(s) K * (s 20) s(s2 24s 144)
m
n
pi ( pl zi ) ( pl pi )
izl zi )
j 1
jl
p2 1800 56.50 190 590 (108.50 900 370 )
790
z2 1800 1530 1990 1210 63.50 1170 900
(2)闭环极点与开环零点、开环极点以及根轨迹增益均有关。 (需专门研究)
j1
(3)
m
K*
(s z j )
m
(zj)
K limsνG(s) H(s) limsν
(4)根轨迹法 s0
s0
sν
j1 nν
(s
pi )
K*
j1 nν
( pi )
根轨迹图
闭环极点
闭环传递函数
性i 1能指标
i 1
3.根轨迹方程
4-2 根轨迹绘制的基本法则
法则1 根轨迹的起点和终点。 法则2 根轨迹的分支数、对称性和连续性。 法则3 根轨迹的渐近线 法则4 实轴上的根轨迹 法则5 根轨迹的分离点和分离角 法则6 根轨迹的起始角与终止角 法则7 根轨迹与虚轴的交点 法则8 根之和
法则一、根轨迹的对称性、分支数和分布性
1.根轨迹连续且对称于实轴。 2. 根轨迹的分支数与开环有限零点数m与有 限个极点数n中的最大者相等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
K*
s1,2 1
1 K*
令K*(由0到∞ )变动,s1、s2在s平面的移动轨 迹即为根轨迹。
K* 0, s1 0, s2 2 K* 1, s1 1, s2 1 K* 2, s1 1 j, s2 1 j K* 5, s1 1 2 j, s2 1 2 j
特征方程的根 运动模态 性、系统性能)
1
1
1 ,d 4
m
(s zi )
1 G(s)H(s) 0
G(s)H(s) K*
i1 n
m
(s pj )
(s zi )
j 1
K * i1 n
1
(s pj )
j 1
m
n
模值条件: (s zi ) (s pj ) (2k 1)
i1
j1
n
s pj
相角条件: K *
j 1 m
s zi
i 1
相角条件是确定根轨迹的充分必要条件。相角条件满足(2k 1) 称为180º根轨迹。
4-2 绘制根轨迹的基本法则
一、基本法则
1、 根轨迹的起点和终点:
根轨迹起始于开环极点,终止于开环零点;如果开环零点个数少于 开环极点个数,则有(n-m)条根轨迹终止于无穷远处。
起点: K* 0 s pi
K* s p1 s z1
i 1, 2, n
s pn s zm
终点: K* s zi j 1, 2, m
例题:单位反馈系统的开环传递函数为:G(s)H (s) K *(s 1)
s(s 2)(s 3)
试绘制闭环系统的根轨迹
解: 1、开环零点z1=-1,开环极点p1=0,p2=-2,p3=-3, 根轨迹分支数为3条,有两个无穷远的零点。
2、实轴上根轨迹为[-3,-2],[-1,0]
3、求渐近线:
渐近线与实轴夹角为:
j 1
i1
d
ds
n j 1
(s
pj
)
K*
d ds
m
(s zi )
i1
(2)
(2) (1)
d n
ds j1
n
(s
pj)
dm
ds i1
m
(s zi )
(s p j ) (s zi )
j 1
i 1
d ln
n
(s
j 1
pj )
d ln
m i 1
(s zi )
ds
ds
n d ln(s pj ) m d ln(s zi )
j 1
ds
i1
ds
n
1
m
1
j1 s p j i1 s zi
m
若无开环零点,则:
1
0
i1 d zi
注意:
➢一般说来,若实轴上两相邻开环极点之间有根轨迹,则这 两相邻极点之间必有分离点; ➢ 如果实轴上相邻开环零点(其中一个可为无穷远零点) 之间有根轨迹,则这相邻零点之间必有会合点。 ➢ 如果实轴上根轨迹在开环零点与开环极点之间,则它们 之间可能既无分离点也无会合点,也可能既有分离点也有会 合点。
i 1
j2
p1 s1•
1
4
p4 z
p2
2
3
p3
在离开p1附近的根轨迹上取一点 s1,则s1点应满足相角条件:
(s1 p1) (s1 p2) (s1 p3) (s1 p4) 1 2 3 4 (2k 1)
当 s1 p1 时,1 即为离开根轨迹上 p1 的起始角,1 p1 ,则:
系统动态响应(稳定
因此利用根轨迹,可以分析系统稳定性、稳态性能和动态性 能。
(1)稳定性:根轨迹都在S左半平面,闭环系统稳定。
(2)稳态性能:ess
2 K*
(3)动态性能:0<K*<1,两个不等负实根,过阻尼系统;
K*=1,两个相等负实根,临界阻尼系统;
K*>1,一对共轭复根,欠阻尼系统;
二、根轨迹方程
K*
nm0
lim
s
p1
s s z1
s pn lim s nm s zm s
2、根轨迹的分支数及对称性和连续性
(1)根轨迹分支数=特征根个数。
(2)由于闭环特征根是实根或共轭复根,故根轨迹对 称于实轴。
(3)由于K*连续变化,故根轨迹具有连续性。
3、根轨迹的渐近线:
n-m条根轨迹沿着渐近线趋向无穷远处,渐近线与实轴交 点和夹角为:
m
n
p1 (2k 1) ( p1 zi ) ( p1 p j )
i 1
j2
根轨迹的终止角是根轨迹进入开环复数零点处
切线与正实轴的夹角:
n
m
z1 (2k 1) (z1 p j ) (z1 zi )
j 1
i2
例题:已知单位反馈系统的开环传递函数为
K*(s 2) G(s)
m
分离点坐标d的求解:
1
n
1
i1 d zi j1 d p j
证明:
m
n
F(s) K* (s zi ) (s pj ) 0
i1
j 1
dF(s)
ds
d ds
K
*
m i 1
(s zi )
n
(s
j 1
pj) 0
n
m
(s pj ) K* (s zi )
(1)
第四章 线性系统的根轨迹法
4-1 根轨迹法的基本概念 4-2 绘制根轨迹的基本法则 4-3 广义根轨迹法
4-1 根轨迹法的基本概念一、根轨迹的概念根轨迹是开环系统的某一参数从零变化到无穷时, 闭环系统特征方程式的根在S平面上变化的轨迹。
举例:
R(s) -
K
C(s)
s(0.5s 1)
(s)
s2
K* 2s
(s 1 j 3)(s 1 j 3)
绘制系统的根轨迹,并求系统有超调响应时K*的取值 范围。
解: 1、一个开环零点,两个开环极点;两条根轨迹分支;有 一个无穷远处的零点。
2、渐近线与实轴重合的,实轴上根轨迹(-,-2]。
3、初始角: p1 180 (60 90 ) 150 , p2 150
4、求分离点:
渐近线与实轴交点为:
(2k 1)
3
,k 31
0,1 1
, 2
2
2
0231 2 31
4、求分离点:
1
1
d1 d
d
2.47
1 d2
1 d3
j
2.47 3 2 1 0
6、根轨迹的起始角和终止角:
根轨迹的起始角是根轨迹离开开环复数极点处 切线与正实轴的夹角:
m
n
p1 (2k 1) ( p1 zi ) ( p1 p j )
n
m
pi z j
a
i 1
j 1
nm
a
(2k 1)
nm
4、实轴上的根轨迹 实轴上某一区域其右方开环实数的零点数和极点数的总 和为奇数,该区域为根轨迹。
1 2 3 [1 2 3 4 5 ]
0 3600 [1800 3600 0 0] 1800
5、根轨迹的会合点和分离点:
若干根轨迹在复平面上相遇后又分开的点称为分离点或会 合点。