树莓派开发环境搭建
Python树莓派开发从入门到精通

内容摘要
通过这些内容的学习,读者可以深入了解树莓派的硬件特性和性能优化技巧。本书还介绍了树莓 派在物联网(IoT)领域的应用,让读者了解如何使用树莓派构建智能家居、智能农业等物联网 应用。 本书还提供了大量的参考资料和附录,包括树莓派官方文档、Python语言参考、常用模块使用指 南等。这些资料对于树莓派开发者来说非常有价值,可以帮助读者更好地理解和应用所学知识。 《Python树莓派开发从入门到精通》是一本非常全面的树莓派开发书籍,适合于从初学者到高级 开发者各个层次的人员阅读。无论大家是想学习Python编程还是想了解树莓派开发,这本书都是 非常不错的选择。
我要感谢社和作者为我们提供了这样一本优秀的书籍——《Python树莓派开 发从入门到精通》。这本书以其详尽的内容、清晰的步骤和丰富的实例,为读者 提供了全面的树莓派开发指南。
阅读感受
对于初学者来说,这本书从基础知识开始,介绍了树莓派的起源、特点和功 能,让我们对树莓派有了全面的了解。然后,通过一系列实际案例和项目,将我 们从初学者引领到精通的境界。
精彩摘录
在树莓派上开发Python程序需要先搭建一个合适的环境。本书介绍了如何使 用SD卡和Linux操作系统来启动树莓派,并配置Python解释器和编辑器。本书还 详细介绍了如何使用GPIO库来控制树莓派的GPIO引脚,以及如何使用树莓派的硬 件接口(如摄像头、音频接口等)来实现各种功能。
精彩摘录
精彩摘录
精彩摘录
《Python树莓派开发从入门到精通》是一本介绍树莓派(Raspberry Pi)开 发的重要书籍,它详细介绍了如何使用Python编程语言在树莓派上进行各种应用 开发。这本书不仅适合于树莓派爱好者,也适合于对Python编程感兴趣的读者。 以下是本书的一些精彩摘录:
基于树莓派的人脸识别门禁系统

基于树莓派的人脸识别门禁系统一、概述随着科技的飞速发展,智能化、自动化的门禁系统已经逐渐取代传统的门禁方式,成为现代社会安全防范的重要组成部分。
本文旨在介绍一种基于树莓派的人脸识别门禁系统,该系统利用树莓派强大的计算能力和人脸识别技术的精准性,实现了门禁系统的智能化管理,提高了安全性和便利性。
树莓派作为一款功能强大的开源硬件平台,具有体积小、功耗低、易于扩展等特点,非常适合用于构建各种智能系统。
人脸识别技术则通过捕捉和分析人脸特征,实现对个体身份的快速准确识别。
将两者相结合,可以构建出一种高效、可靠的人脸识别门禁系统。
该门禁系统通过摄像头捕捉人脸图像,然后利用人脸识别算法对图像进行处理和分析,提取出人脸特征并与预设的数据库进行比对。
当识别结果匹配成功时,门禁系统自动控制门锁打开,允许人员通行;当识别失败时,则拒绝通行并发出警报。
相比传统的门禁方式,基于树莓派的人脸识别门禁系统具有以下优点:人脸识别技术具有非接触性,无需刷卡或输入密码,提高了使用的便利性;系统可以自动记录通行记录,方便后期查询和管理;系统具有较高的安全性,可以有效防止非法入侵和冒充他人身份的情况发生。
基于树莓派的人脸识别门禁系统是一种具有广阔应用前景的智能门禁解决方案,适用于各种需要严格控制人员进出的场所,如办公楼、住宅小区、学校等。
通过不断优化和完善系统功能和性能,相信这种门禁系统将在未来得到更广泛的应用和推广。
1. 介绍门禁系统的重要性及其应用场景门禁系统作为现代安全管理的重要组成部分,具有举足轻重的地位。
随着科技的不断进步和社会安全需求的日益增长,门禁系统已经不再是简单的门锁或钥匙管理,而是演变为一套集身份识别、权限管理、安全监控于一体的智能化系统。
它广泛应用于各种场景,包括但不限于企事业单位、住宅小区、学校、银行、商场等公共场所,为人们的生活和工作提供了极大的便利和安全性保障。
在企事业单位中,门禁系统能够确保只有经过授权的员工才能进入特定的办公区域,有效防止未经授权的闯入和敏感信息的泄露。
SLAM+语音机器人DIY系列:(二)ROS入门——9.熟练使用rviz
SLAM+语⾳机器⼈DIY系列:(⼆)ROS⼊门——9.熟练使⽤rviz 温馨提⽰本篇⽂章已经收录在我最新出版的书籍《机器⼈SLAM导航核⼼技术与实战》,感兴趣的读者可以购买纸质书籍来进⾏更加深⼊和系统性的学习,购买链接如下:摘要ROS机器⼈操作系统在机器⼈应⽤领域很流⾏,依托代码开源和模块间协作等特性,给机器⼈开发者带来了很⼤的⽅便。
我们的机器⼈“miiboo”中的⼤部分程序也采⽤ROS进⾏开发,所以本⽂就重点对ROS基础知识进⾏详细的讲解,给不熟悉ROS的朋友起到⼀个抛砖引⽟的作⽤。
本章节主要内容:9.熟练使⽤rviz(1)rviz整体界⾯(图29)rviz整体界⾯rviz是ROS⾃带的图形化⼯具,可以很⽅便的让⽤户通过图形界⾯开发调试ROS。
操作界⾯也⼗分简洁,如图29,界⾯主要分为上侧菜单区、左侧显⽰内容设置区、中间显⽰区、右侧显⽰视⾓设置区、下侧ROS状态区。
(2)添加显⽰内容(图30)设置Global Options如图30,启动rviz界⾯后,⾸先要对Global Options进⾏设置,Global Options⾥⾯的参数是⼀些全局显⽰相关的参数。
其中的Fixed Frame参数是全局显⽰区域依托的坐标系,我们知道机器⼈中有很多坐标系,坐标系之间有各⾃的转换关系,有些是静态关系,有些是动态关系,不同的Fixed Frame参数有不同的显⽰效果,在导航机器⼈应⽤中,⼀般将Fixed Frame参数设置为map,也就是以map坐标系作为全局坐标系。
值得注意的是,在机器⼈的tf tree⾥⾯必须要有map坐标系,否则该选项栏会包error。
⾄于Global Options⾥⾯的其他参数可以不⽤管,默认就⾏了。
(图31)添加地图显⽰如图31,在机器⼈导航应⽤中,我们常常需要⽤rviz观察机器⼈建⽴的地图,在机器⼈发布了地图到主题的情况下,我们就可以通过rviz订阅地图相应主题(⼀般是/map主题)来显⽰地图。
树莓派使用说明
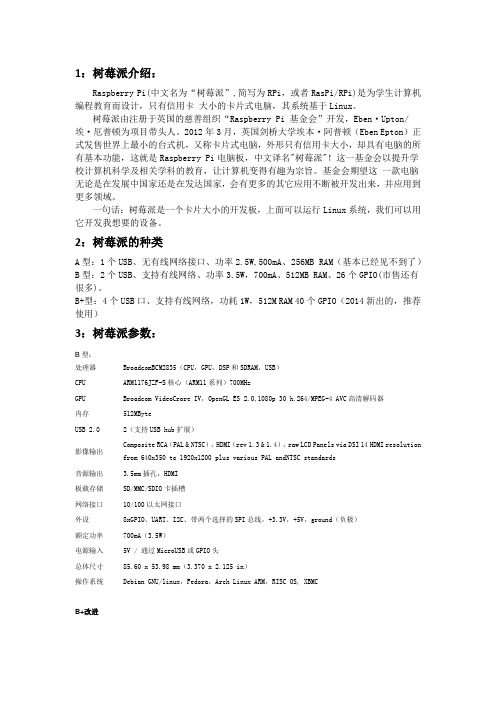
1:树莓派介绍:Raspberry Pi(中文名为“树莓派”,简写为RPi,或者RasPi/RPi)是为学生计算机编程教育而设计,只有信用卡大小的卡片式电脑,其系统基于Linux。
树莓派由注册于英国的慈善组织“Raspberry Pi 基金会”开发,Eben·Upton/埃·厄普顿为项目带头人。
2012年3月,英国剑桥大学埃本·阿普顿(Eben Epton)正式发售世界上最小的台式机,又称卡片式电脑,外形只有信用卡大小,却具有电脑的所有基本功能,这就是Raspberry Pi电脑板,中文译名"树莓派"!这一基金会以提升学校计算机科学及相关学科的教育,让计算机变得有趣为宗旨。
基金会期望这一款电脑无论是在发展中国家还是在发达国家,会有更多的其它应用不断被开发出来,并应用到更多领域。
一句话:树莓派是一个卡片大小的开发板,上面可以运行Linux系统,我们可以用它开发我想要的设备。
2:树莓派的种类A型:1个USB、无有线网络接口、功率2.5W,500mA、256MB RAM(基本已经见不到了)B型:2个USB、支持有线网络、功率3.5W,700mA、512MB RAM、26个GPIO(市售还有很多)。
B+型:4个USB口、支持有线网络,功耗1W,512M RAM 40个GPIO(2014新出的,推荐使用)3:树莓派参数:B型:处理器BroadcomBCM2835(CPU,GPU,DSP和SDRAM,USB)CPU ARM1176JZF-S核心(ARM11系列)700MHzGPU Broadcom VideoCrore IV,OpenGL ES 2.0,1080p 30 h.264/MPEG-4 AVC高清解码器内存512MByteUSB 2.02(支持USB hub扩展)影像输出Composite RCA(PAL & NTSC),HDMI(rev 1.3 & 1.4),raw LCD Panels via DSI 14 HDMI resolution from 640x350 to 1920x1200 plus various PAL andNTSC standards音源输出 3.5mm插孔,HDMI板载存储SD/MMC/SDIO卡插槽网络接口10/100以太网接口外设8xGPIO、UART、I2C、带两个选择的SPI总线,+3.3V,+5V,ground(负极)额定功率700mA(3.5W)电源输入5V / 通过MicroUSB或GPIO头总体尺寸85.60 x 53.98 mm(3.370 x 2.125 in)操作系统Debian GNU/linux,Fedora,Arch Linux ARM,RISC OS, XBMCB+改进•更多的GPIO:B+将通用输入输出引脚增加到了40个,而Model B则只有26个;• 更多的USB:B+提供了4个USB端口,对热插拔有着更好的兼容性(Model B只有2个);• 支持microSD:旧款的SD卡插槽,已经被换成了更漂亮的推入式microSD卡槽;• 更低的功耗:将线性式稳压器换成了开关式,功耗降低了0.5W到1W;• 更好的音频:音频电路部分采用了专用的低噪供电;• 简洁的外形:USB接口被推到了主板的一边,复合视频移到了3.5mm音频口的位置,此外还增加了4个独立的安装孔。
关于树莓派的智能仓库系统设计
关于树莓派的智能仓库系统设计摘要:本文介绍了使用树莓派设计的智能仓库系统,系统采用温湿度传感器、光照传感器、无线网络模块等技术,实现了对仓库内环境的实时监测和数据传输,同时结合智能算法,对货物的进出、库存等情况进行智能管理。
本文详细介绍了系统的设计原理、硬件组成、软件设计以及实验结果。
关键词:树莓派;智能仓库;温湿度传感器;光照传感器;无线网络模块;智能算法正文:随着物流行业的快速发展,对于仓库管理的要求越来越高。
传统的仓库管理模式已经无法适应市场快速变化的需求和巨大的管理压力。
因此,在技术革新的推动下,智能仓库的出现给仓库管理带来了巨大的改变和发展。
智能仓库是指通过先进的技术手段,实现智能化、自动化的仓库管理,从而提高货物流通性、节约管理成本、提高仓库工作效率。
本文设计的智能仓库系统以树莓派为核心平台,采用温湿度传感器、光照传感器、无线网络模块等技术实现了对仓库内环境的实时监测和数据传输,同时结合智能算法,对货物的进出、库存等情况进行智能管理。
系统的硬件组成主要包括树莓派3B+、温湿度传感器DHT11、光照传感器和ESP8266无线网络模块。
树莓派作为系统的核心处理器,通过GPIO接口连接各个传感器和无线模块,并完成数据采集、处理和传输的任务。
温湿度传感器和光照传感器用于获取仓库内的环境参数,通过树莓派将数据发送到服务器上,从而实现对仓库环境的实时监测。
ESP8266无线网络模块作为数据传输的工具,将仓库环境数据上传并与服务器进行实时通信。
系统的软件设计采用Python语言进行编程,通过树莓派GPIO库和API接口实现各类设备的对接和控制。
在智能算法方面,系统通过对比实时数据和历史数据,对货物的进出、库存等情况进行预测和智能管理,并能够通过Web端展示和管理系统数据和状态信息。
实验结果表明,本文设计的智能仓库系统可以及时、准确地监测和传输仓库内部环境信息,并实现对货物的智能管理与预测,通过提高仓库管理的效率和准确度,大大降低了管理成本,满足多样化的物流需求。
智能家居实训总结报告
智能家居实训总结报告智能家居是一种以物联网技术为基础,将各种智能设备集成在一起,实现家庭设备的自动化管理和智能化控制的家居系统。
本次实训主题为智能家居,希望通过实际操作和探索,深入了解智能家居的概念、原理、应用及未来发展趋势,提升实践能力和创新思维。
一、实训目的1、了解智能家居的定义、基本原理和结构组成;2、熟练掌握智能家居系统的设计和构建方法;3、掌握智能硬件与软件交互原理和技术实现;4、了解智能家居的应用场景和发展趋势,培养创新思维。
二、实训过程1、理论知识学习在实训开始之前,我们首先对智能家居的定义、基本原理、结构组成等理论知识进行了学习和掌握。
学习内容主要包括:(1)智能家居概念及其发展历程;(2)智能家居的组成和构成;(3)智能家居核心技术及其实现原理;(4)智能家居的应用场景和发展趋势。
2、硬件设备选配在理论学习知识后,根据实训教学计划,我们需要进行硬件设备选配。
根据实训需要,我们选择了如下硬件设备:(1)Raspberry Pi 3B主板;(2)Arduino 控制板;(3)超声波传感器、温湿度传感器、光敏传感器、手势传感器等;(4)智能开关、智能插座、智能灯具等;3、软件环境搭建(1)操作系统安装和配置;(2)编程环境配置;(3)应用程序开发环境搭建。
我们选择树莓派操作系统Raspbian作为系统,安装python3开发环境和cpp开发环境,并通过vscode等编辑器实现程序的编写和调试。
4、智能家居系统设计在硬件设备选配和软件环境搭建完成之后,我们需要对智能家居系统进行设计。
设计方案涉及到系统的硬件控制、数据采集和处理、通信协议等多个方面。
(1)智能灯光控制:可以使用光敏传感器、手势传感器,控制灯光的亮度和颜色;(2)智能插座:通过智能插座,可以实现对电器的开关控制;(3)智能温度控制:通过温湿度传感器,可以对空气温度进行监测和控制;(4)智能安防:通过超声波传感器,探测是否存在非法入侵。
树莓派创建C

树莓派创建C/C++工程(三方库高效便捷调用)1. 前言:工欲善其事,必先利其器!很多工程师做嵌入式开发几乎都使用交叉编译的环境。
我这里介绍一种简单入门级的开发方式,用Qt的SDK,Qt Creator(IDE),三方库做树莓派上的C/C++工程项目开发。
虽然直接在树莓派上编译会耗费较长时间(与PC相比),但是做一些小的项目也不需要花费太多时间,而且能调用Qt提供的API和类进行快速高效的开发。
所以我认为,这个环境适合轻量级的项目开发,效率与移植性的确不错。
吧啦了很多,直接进入正题,介绍环境的搭建,以及新建一个小项目。
2. Qt环境的搭建配置:我们是在树莓派上搭建环境,用的是Raspbian系统(官方系统)。
Qt配置官方参考/wiki/apt-get_Qt4_on_the_Raspberry_Pi。
【1】首先更新一下树莓派sudo apt-get updatesudo apt-get upgrade【2】安装一些辅助工具sudo apt-get install gccsudo apt-get install xtermsudo apt-get install git-coresudo apt-get install subversion【3】 Qt SDK安装sudo apt-get install qt4-dev-tools【4】 Qt creator安装(IDE)sudo apt-get install qtcreatorQt是4.8.1的SDK,2.5.0的Creator。
如图1,可以把Qt Creator 放到桌面。
图1 QtSDK&Qt Creator安装成功【5】构建配置打开Qt Creator之后是英文环境,可以将其配置成中文环境(Tools->Options…)如图2.图2 配置中文环境选择Environment,再选择General标签,在Language下拉选项中选择Chinese(如图3),重启Creator后配置成功。
从零开始配置树莓派3远程Python开发环境
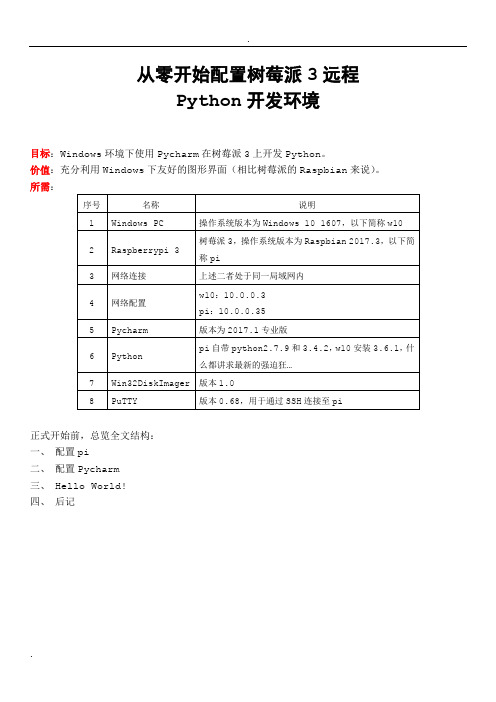
从零开始配置树莓派3远程Python开发环境目标:Windows环境下使用Pycharm在树莓派3上开发Python。
价值:充分利用Windows下友好的图形界面(相比树莓派的Raspbian来说)。
所需:正式开始前,总览全文结构:一、配置pi二、配置Pycharm三、Hello World!四、后记一、配置pi1.安装Raspbian将pi的SD卡插入w10,打开Win32DiskImager,选择从树莓派官网下载的Raspbian镜像,选择该SD卡的设备符,点击写入即可(图1.1)。
注意,不要选错SD卡的路径,请再三确认以确保数据安全!另外,已使用过的SD卡,选择能在Windows资源管理器里面显示的盘符即可,不用理会这个boot分区的大小。
图1.1 写入Raspbian镜像写入完毕后,将SD卡插入pi,接通电源,开机(图1.2)。
图1.2 pi首次开机上图出现的白边是因为pi的显示模式未配置,解决这个问题前,先配置远程桌面连接,以方便在w10上快速便捷地操作。
2.配置pi的远程桌面连接首先,配置pi的IP获取方式为静态IP(图1.3)。
右击右上角的上下箭头,选择Wireless & Wired Network Settings:图1.3 设置静态IP然后安装xrdp和相关包(图1.4)。
打开终端,输入sudo apt-get install xrdp为了避免error problem connecting的问题,继续安装以下两个包:sudo apt-get install vnc4server tightvncserver图1.4 安装xrdp接下来,回到w10,使用远程桌面工具连接pi,配置如下:图1.5 配置w10远程桌面其中,用户名为pi,密码为raspberry,均为系统默认值,为了安全,可以更改密码或创建新的用户。
连接上的远程桌面如图1.6:图1.6 w10远程桌面连接pi界面最后来解决显示器白边问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、系统安装
1、打开SDFormatter.exe格式化SD卡
2、打开烧录器Win32DiskImager.exe把系统写入SD卡
二、安装QT5
1、更新软件包
在终端输入sudo apt-get update
2、安装qt5-default
在终端输入sudo apt-get install qt5-default
3、安装qtcreator
在终端输入sudo apt-get install qtcreator
4、配置GCC
工具->选项->构建和运行->构建套件->点击【编译器】后面的Manage添加GCC 编译器的路径为/usr/bin/gcc
设备类型选择桌面
三、安装中文google输入法
sudo apt-get install fcitx fcitx-googlepinyin fcitx-module-cloudpinyin fcitx-sunpinyin(装完之后要重启)
四、树莓派和win7文件共享
/study/portal.php?aid=599&mod=view
1、sudo apt-get update
2、Sudo apt-get install samba samba-common-bin
3、sudo vi /etc/samba/smb.conf
4、配置每个用户可以读写自己的home 目录,在“[homes]”节中,把“read only = yes”改为“read only = no”。
5、sudo /etc/init.d/samba restart
6、sudo smbpasswd -a pi
五、打开自带串口
六、树莓派实时时钟
在树莓派使用上RTC实时时钟,不用再担心断电后时间归零的问题,开机后自动同步RTC时钟!!!
参考网址:/p/4111488017
1、购买基于DS3231的RTC时钟模块,并且支持3.3V的那种
2、配置树莓派
a、打开树莓派的i2c接口
sudo raspi-config -->Advanced Option-->I2C,全部选择yes
b、添加i2c模块
sudo nano /etc/modules
然后添加以下两行内容:
i2c-bcm2708
i2c-dev
c、安装i2c工具,查看i2c设备b
sudo apt-get install i2c-tools
执行命令查看i2c设备
sudo i2cdetect -y -a 1
显示的地址就是我们需要使用的,树莓派一般是68
d、编辑启动文件/etc/rc.local
sudo nano /etc/rc.local
将以下内容加入“exit0”行之前
sudo modprobe i2c-dev
sudo modprobe i2c-bcm2708
echo ds3231 0x68 | sudo tee /sys/class/i2c-ad apter/i2c-1/new_device
sudo hwclock -r
sudo hwclock -s
3、hwclock命令介绍
sudo hwclock -r #读时钟
sudo hwclock -s #写时钟
sudo hwclock -w #把系统的时间写入DS3231
七、将Top软件设置为开机启动
首先将Top执行先关的配置文件复制到/home/pi目录下
文件列表
Log文件夹、
GPRSConnect.ini、
setReadCycle.ini、
setSerical.ini、
timeAreaAvgSet.ini、
top.db、
Top。
然后进入目录 /home/pi/.config/autostart
cd /home/pi/.config/autostart
然后再次目录下新建一个以.desktop为后缀的文件
sudo vi my.desktop
编辑文件内容为
[Desktop Entry]
Type = Application
Exec = ./Top
保存后重启就会自动打开Top软件
八、操作Nanopi2 fire的GPIO
Nanopi安装wiringNPi库
sudo git clone https:///chenzhiwo/wiringNPi
进入wiringNPi目录
sudo make
sudo make install
加载PWM内核
sudo modprobe matrix_pwm
编译程序需要用root用户启动QT
九、配置Debain 不输入密码执行sudo命令
首先切换到根用户
$ sudo su
然后执行visudo命令
# visudo
把 root ALL=(ALL:ALL)ALL改为 root ALL=(ALL) ALL
把 fa ALL=(ALL:ALL)ALL改为 fa ALL=(ALL) ALL
把 %sudo ALL=(ALL:ALL)ALL改为 %adm ALL=(ALL) NOPASSWD: ALL 按Ctrl + X先保存后退出
在终端输入
# gpasswd -a 用户名 adm
然后重启系统之后sudo命令就不需要输入密码就可以执行了
十、Debain设置开机启动Top
首先将Top执行先关的配置文件复制到/home/fa目录下
文件列表
Log文件夹、
GPRSConnect.ini、
setReadCycle.ini、
setSerical.ini、
timeAreaAvgSet.ini、
top.db、
Top。
编辑/etc/rc.local文件
# sudo vi /etc/rc.local
在exit 0之前输入
sudo modprobe matrix_pwm
sudo ./Top
保存退出重启系统后就可以自动打开Top软件了。