短基线干涉仪测元与距离变化率融合处理方法
干涉仪基线组合对测向精度的影响
干涉仪基线组合对测向精度的影响作者:吴一帆来源:《中国新通信》2014年第02期【摘要】针对干涉仪测向算法,以三种不同基线组合为例,通过理论和仿真分析,说明信号频率、来波方位、相位模糊对测向精度的具体情况。
得出长基线数量越多测向模糊越严重,但测向精度越高的结论。
为干涉仪测向系统的工程应用提供理论依据。
【关键词】干涉仪基线组合测向精度相位模糊常用的测向体制包括比幅法、瓦特森-瓦特测向法、多普勒法测向法、干涉仪法测向法和空间谱估计法等[1]。
干涉仪法测向具有测向精度高、测向速度快等优点,是目前无线电测向领域的主要测向体制。
在基于干涉仪测向体制的系统中,测向天线阵是影响系统测向精度的重要因素。
测向天线阵一般采用均匀圆形阵列,具有以下优点:(1)天线元之间的互耦情况相同;(2)与支撑天线阵的桅杆互耦最小;(3)测向精度与来波方向无关;(4)具有圆对称性,其方向图在阵列盘面上电磁旋转扫描时波束的形状不会有太大改变。
可见,均匀圆形阵列干涉仪测向系统兼有优越的结构特点和良好的测向性能,这使其在军用和民用领域均有广泛的应用[2]。
一、干涉仪测向算法以图1所示的四元天线为例,假设天线对NS、EW的间距均为d,来波的方位角为θ,则电波到达NS天线对时所形成的的相位差分别为:二、三种基线组合对测向精度影响的分析以5单元均匀圆阵列为例,其中A1、A2、A3、A4、A5分别表示1号、2号、3号、4号、5号天线单元。
5个天线单元两两组合共有10条基线。
此处主要分析三种基线组合方式:最短基线法、最长基线法、长短基线法。
最短基线法选取A2A1、A3A2、A4A3、A5A4为基线组合;最长基线法选取A3A1、A4A2、A5A3、A1A4为基线组合;长短基线法选取A2A1、A3A1、A4A1、A3A2为基线组合。
2.1 信号频率对测向精度的影响以孔径1.5m的5单元均匀圆阵为例,假设频率范围是30~500MHz,来波方位为60°,相位不一致性取10°,通过式(2)可以推算出三种基线组合的测向精度随信号频率的变化曲线,结果如图2所示。
多通道干涉仪测向的相位一致性校正方法

由式 3 可知 , ) 干涉仪测向和下列因素有关 : a天 线单 元 之 间的基 线长 度 f ) 和信 号波 长 b信号 的频 率测 量 精度 )
c辐 射 源 的入 射 角 0 )
d )
在干涉 仪测 向 系统 中 , 小 噪 声影 响 的一 个 减 途径 就是 提高 信 噪 比。另一 个途 径就 是采 用多 次
d O-
+
.
() 3
式中, 声为信号的相位差 , 为信号波长 , 为天线 z
间距 。
24 鉴 相 误 差 .
干 涉仪 接收 机信 号 的鉴 相 测量 误 差 与诸
多 因素 有关 。主要 有 : 收 通 道 在 频 带 内 的相 位 接 失配; 接收通 道 内部 噪声 引起 的相位 误差 ; 天线 阵
方 向 图和通 道 相位 的不 一致 将直 接 导致测 向性能 严 重下 降 。文献 [ ] 出 了多 通 道 相位 进行 自动 5提
方法 。文献 [ ] 述 了通 道 不 一 致 对 干涉 仪 测 向 8论
的影 响 , 出 了解 决 方法 。 提
文献[ 5—8都 不 同程 度 地提 出了一 些 干涉 仪 ] 测 向通 道校 正方 法 , 的 只解 决 了传 统 的静 态 相 有 位校 正 , 的需增 加 较多 硬件 设备 , 正过 程较 复 有 校 杂 。本 文在 系统 设 计 时 只增 加 了一 个 自检 源 , 通 过改 进 自检 源快 速静 态 和动态 的通 道 相位 一致 性 校 正方 法并 结合 相位 误差 定 时或 实时 检测 技术 等
lzdi dtladanvlm to fip vdrpdD orco spooe .M aw i ,BT ye e i n oe e do r e ai Fcr tni rpsd e hl I n a h mo ei n e
基于二维单基线的单星高精度无源定位算法

基于二维单基线的单星高精度无源定位算法郑仕力;董乔忠;王笃祥【摘要】Due to the large equipment and the complex structure of multi‐baseline interferometers ,a new high precision passive location by single satellite observer based on particle kinematics is proposed .In view of the unambiguous specialty of the phase rate‐of‐changing and the high precision in direction of the long baseline phase differences ,the ambiguous phase difference and the changing rate of phase difference are used in this al‐gorithm .The particle swarm optimiz ation algorithm is improved to accomplish the high precision passive lo‐calization .The simulation results show that this method can attain the CRLB .%针对长短基线干涉仪定位系统设备量大、系统复杂的问题,提出了基于运动学原理的单星高精度无源定位技术。
以模糊相位差和相位差变化率为观测量,并采用三通道二维单基线阵列构型,充分利用长基线相位差定位精度高的特点,并结合相位差变化率的无模糊特性,通过粒子群改进算法实现高精度的定位。
仿真结果表明,该算法定位精度高,定位性能接近CRLB。
一种星载干涉仪解模糊失败识别方法

一种星载干涉仪解模糊失败识别方法张广宇;王笃祥;陈卓;季权【摘要】针对星载干涉仪测向解模糊失败问题,基于波束形成原理提出一种解模糊失败识别方法.该方法在干涉仪测向定位方法的基础上有效利用了各通道接收信号的幅度信息,通过合成信号功率判断测角结果正确与否,可有效提高星载电子侦察系统的情报准确性,仿真结果证明了该方法的有效性.【期刊名称】《航天电子对抗》【年(卷),期】2017(033)003【总页数】4页(P25-27,41)【关键词】星载干涉仪;测向;定位【作者】张广宇;王笃祥;陈卓;季权【作者单位】中国航天科工集团8511所,江苏南京210007;中国航天科工集团8511所,江苏南京210007;中国航天科工集团8511所,江苏南京210007;中国航天科工集团8511所,江苏南京210007【正文语种】中文【中图分类】TN971+.1以卫星为平台的电子侦察系统不受国界、领空、领海和天气的限制,可以进行长时间和大面积的侦察监视,快速获取战略战术情报,具有广阔的发展空间和应用前景[1]。
单星仅测向定位体制通过测向得到指向辐射源的方向线,然后根据卫星的姿态参数和导航数据计算出辐射源的地理位置,从而实现对辐射源的定位[2]。
当前单星仅测向定位体制中常用的是二维干涉仪测向定位方法[3],该体制技术相对简单,工程上易于实现,且可以做到单脉冲定位,实时性好。
然而干涉仪测向系统的核心问题就是求解相位模糊,常规的解模糊方法包括长短基线法、参差基线法、虚拟基线法、最小二乘法等[4],但无论何种方法当基线间相位差测量误差超过系统容差时,星载干涉仪对单脉冲的测向都可能出现解模糊失败,从而导致定位跳区。
针对该问题,本文基于波束形成原理提出一种干涉仪解模糊失败识别方法,该方法可有效识别解模糊失败的测角结果,提高单星测向定位电子侦察系统情报准确性。
星载干涉仪测向定位的基本原理是利用相互正交的两组测向天线测量在同一时刻接收到的信号的相位差,通过干涉仪测角方法获得目标辐射源相对平台位置的角度,根据角度结合平台位置信息对目标进行定位。
gnss 短基线解算 -回复

gnss 短基线解算-回复GNSS(全球导航卫星系统)短基线解算是一种利用多颗卫星的观测数据来计算测量点之间的相对位置的方法。
它是一种相当常见的技术,被广泛应用于地理测量、地震监测、航空航天等领域。
下面将逐步介绍GNSS短基线解算的原理和步骤。
第一步:数据采集在进行GNSS短基线解算之前,首先需要进行数据采集。
通常情况下,我们需要准备两个或更多的GNSS接收机,并将它们安装在测量点上。
接收机会同时接收多颗卫星的信号,并记录下它们的观测数据,包括卫星的位置、接收机的时刻等。
第二步:数据预处理在进行解算之前,我们需要对采集到的观测数据进行预处理。
这包括对数据进行时钟偏差和系统误差的校正,以及对观测数据进行差分处理。
差分处理是一种常见的技术,可以提高GNSS解算的精度和可靠性。
在差分处理中,我们会使用一个已知的参考站的观测数据与待测站的观测数据进行比较,从而消除大部分的系统误差。
第三步:解算原理GNSS短基线解算的原理基于卫星的信号传播时延。
当一个接收机接收到多颗卫星的信号时,信号会经过大气层、电离层等影响传播速度的介质,导致接收到的信号与卫星的真实位置存在微小的误差。
通过测量这些误差,我们可以得出测量点之间的相对位置。
第四步:解算步骤GNSS短基线解算通常分为以下几个步骤:1. 卫星定位:根据接收机的观测数据和卫星的位置信息,计算出每个接收机与卫星的距离。
2. 相对位置估计:通过比较接收机之间的距离差异,可以估计出测量点之间的相对位置。
这个过程中一些误差可能会被减小或消除,例如大气延迟误差。
3. 参数调整:在进行相对位置估计之后,可能会存在一些误差。
这时,我们需要通过参数调整来优化解算结果。
参数调整的方法通常是最小二乘法,通过最小化观测值与预测值的差异,来找到最优的参数值。
4. 精度评估:最后,我们需要对解算结果进行精度评估。
常见的评估方法包括统计分析、偏差分析等。
通过这些分析,我们可以得到GNSS短基线解算的精度和可靠性。
干涉式测向方法的误差的产生分析及消除
⼲涉式测向⽅法的误差的产⽣分析及消除2019-04-26摘要:⼲涉式测向⽅法简介,从测向原理、造成误差的原因多⽅⾯进⾏了深⼊剖析,对于⼲涉式测向产⽣的误差问题,采⽤天线转换连接、增加校正参数的⽅法,验证后获得较好的结果,能够在⼯程实现上解决测向存在的误差。
关键词:⼲涉式测向;伪距测量;基线测量;误差消除⼲涉式测向作为⼀种精确的⽆线电测向⽅法,⼴泛应⽤在军事、科研领域。
利⽤统⼀发射源发射信号,到接收终端统⼀天线阵中两根接收天线的时间差,和这两根天线之间的间距,通过三⾓公式求解,进⽽得到相对⾓,实现相对定位。
1 ⼲涉式测向原理⼲涉式测向原理图如图1所⽰,设两天线的间距为d,以天线连线⽅向为⽅位基准。
当被测⽬标发射源远离测向系统时(天线R0远⼤于d),及发射源到两个测向天线传播⽅向近似于平⾏,两个测向天线接收的⽬标回波路径差ΔR与⽅向⾓θ、基线长度d的关系为ΔR=R2—R1=d sin θ(1)sin θ=■θ=arcsin■式中:ΔR—⽬标回波分别到达两天线的距离差;R2—⽬标到测向天线2的距离;R1—⽬标到测向天线1的距离。
则θ值可以得出,θ即为两根测向天线连线垂线与⽬标点之间夹⾓。
⼲涉式测向原理是依靠测量⽬标到两测向天线的路径差ΔR,达到测量⽬标⽅向⾓的⽬的。
2 ⼲涉式测向的误差分析⼲涉式测向根据原理分析可能引起测向误差的原因有如下⼏点:(1)伪距测量误差⼲涉式测向的根本在于准确测量⽬标点到两根测向天线的路径差ΔR,及准确测量两根天线接收到的⽬标点发射信号的时间差Δt,根据下式:ΔR=cΔt(c为⽆线电波在空⽓中的传播速度,近似为3×105 km/s);在接收机中以测向天线1所接收到的信号时刻t1计算,接收机时钟在t时刻产⽣⼀个相同的编码测距信号,这个复现的码在时间上移动,⼀直到与测向天线2收到的测距码产⽣相关为⽌,则两根测向天线接收到的测距码和接收机产⽣的复现码相关过程的时间差即为Δt。
某干涉仪测向系统的测向精度影响因素及相位校准研究
www�ele169�com | 53电子测量0 引言电子战是确保己方使用电磁频谱、同时阻止敌方使用电磁频谱。
电子战最基本的任务之一是提供作战威胁态势情报。
电子对抗侦察本质上就是用于探测、识别并定位威胁源。
而无线电测向是实现威胁源定位的前提条件。
通过截获无线电信号,进而确定辐射源所在方向的过程,称为无线电测向。
测向是电子对抗侦察的重要任务,它可以为辐射源的分选和识别提供可靠的依据,为电子干扰和摧毁攻击提供引导,为作战人员提供威胁告警,为辐射源定位提供参数。
干涉仪测向误差与天线的测向系统的干涉仪基线长度选择、射频通道的相位一致性、测频精度等密切相关。
某电子侦察系统,采用5路干涉仪测向体制。
本文从干涉仪测向的基本原理分析影响干涉仪测向精度的影响因素,而后通过设计校准系统,通过通道校准,减少了多通道的相位误差,增加了干涉仪测向系统稳定性。
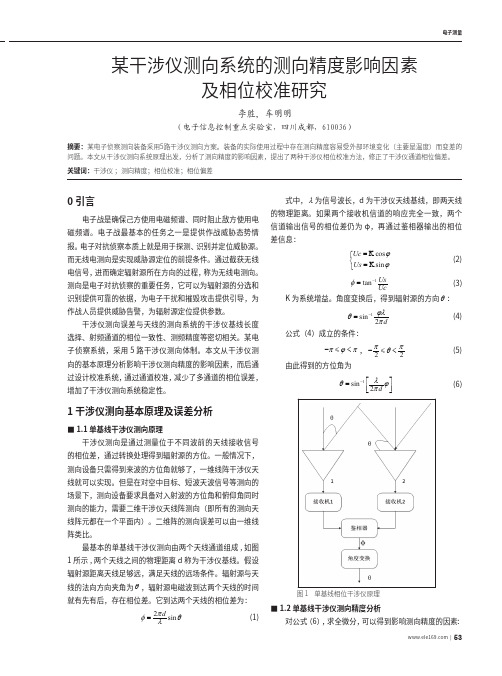
1 干涉仪测向基本原理及误差分析■1.1 单基线干涉仪测向原理干涉仪测向是通过测量位于不同波前的天线接收信号的相位差,通过转换处理得到辐射源的方位。
一般情况下,测向设备只需得到来波的方位角就够了,一维线阵干涉仪天线就可以实现。
但是在对空中目标、短波天波信号等测向的场景下,测向设备要求具备对入射波的方位角和俯仰角同时测向的能力,需要二维干涉仪天线阵测向(即所有的测向天线阵元都在一个平面内)。
二维阵的测向误差可以由一维线阵类比。
最基本的单基线干涉仪测向由两个天线通道组成,如图1所示,两个天线之间的物理距离d 称为干涉仪基线。
假设辐射源距离天线足够远,满足天线的远场条件。
辐射源与天线的法向方向夹角为θ,辐射源电磁波到达两个天线的时间就有先有后,存在相位差。
它到达两个天线的相位差为:2sin d πφθλ=(1)式中,λ为信号波长,d 为干涉仪天线基线,即两天线的物理距离。
如果两个接收机信道的响应完全一致,两个信道输出信号的相位差仍为φ,再通过鉴相器输出的相位差信息:cos sin Uc Us ϕϕ=Κ=Κ (2) 1tan Us Uc φ−= (3)K 为系统增益。
阵列信号处理概述研究背景及意义和波达方向估计技术

阵列信号处理概述研究背景及意义和波达方向估计技术1 概述阵列信号处理作为信号处理的一个重要分支,在通信、雷达、声呐、地震、勘探、射电天文等领域获得了广泛应用和迅速发展。
对所有探测系统和空间传输系统,空域信号的分析和处理是其基本任务。
将多个传感器按一定方式布置在空间不同位置上,形成传感器阵列。
并利用传感器阵列来接收空间信号,相当于对空间分布的场信号采样,得到信号源的空间离散观测数据。
阵列信号处理的目的是通过对阵列接收的信号进行处理,增强所需要的有用信号,抑制无用的干扰和噪声,并提取有用的信号特征以及信号所包含的信息。
与传统的单个定向传感器相比,传感器阵列具有灵活的波束控制、高的信号增益、极强的干扰抑制能力以及高的空间分辨能力等优点,这也是阵列信号处理理论近几十年来得以蓬勃发展的根本原因。
阵列信号处理的最重要应用包括:①信(号)源定位——确定阵列到信源的仰角和方位角,甚至距离(若信源位于近场);②信源分离——确定各个信源发射的信号波形。
各个信源从不同方向到达阵列,这一事实使得这些信号波形得以分离,即使他们在时域和频域是叠加的;③信道估计——确定信源与阵列之间的传输信道的参数(多径参数)。
阵列信号处理的主要问题[]1包括:波束形成技术——使阵列方向图的主瓣指向所需方向;零点形成技术——使天线的零点对准干扰方向;空间谱估计——对空间信号波达方向的分布进行超分辨估计。
空间谱估计技术是近年来发展起来的一门新兴的空域信号处理技术,其主要目标是研究提高在处理带宽内空间信号(包括独立、部分相关和相干)角度的估计精度、角度分辨率和提高运算速度的各种算法。
在所有利用空间谱估计技术来实现对到达方向(DOA)估计的方法中,以R. O. Schmidt 提出的MUSIC 算法最为经典且最有代表性。
Schmidt 在MUSIC 算法中提出了信号子空间的概念,即在维数大于信号个数的观测空间中进行子空间的划分,找出仅由噪声贡献生成的空间(噪声子空间)和由信号和噪声共同作用产生的空间,根据这两个子空间的基底以及阵列流型即可得到待测方向满足的方程,由其解得到来波方向的估计。