距离后方交会计算
全站仪高程及后方交会法要点

“待测点高度仪器读数0.5m”不知是不是指待测点与设站点之间的高差。
假设设站点A,待测点B,则HA+h=HB+i(棱镜高)-d高差即实际高度是:HA+h-i+d高差=1.43+0.5-1.2=0.73M其中HA+h是指视线高,即你所说的仪器高度1.43m。
不过我还是对你的描述有些不解!A是全站仪的点B是棱镜的点HB=HA+1.43+所测斜距*COS天顶距-1.2 如果你正常设站测坐标的话直接测出来的读书就是B点高程输入建站点的坐标和高程,测量出建站点到全站仪的垂直高度,输入到仪器高里面,再输入棱镜高。
后视完,就可以测量了,一般全站仪上有个三角型按钮代表测量距离(平距HD,斜距SD)和高程(高程Z高差VD)。
根据楼层高程和测量的高程差,就可以算出实际差了。
方法一:架设C为已知高程点Hc,B为未知高程点,高程记为Hb将全站仪架设在C点精确对中整平,用钢卷尺量取仪器高度记为i,在B点架设棱镜精确对中整平,量取棱镜高度记为v,用全站仪望远镜精确照准棱镜中心,按下测距按键,得出AB水平距离D,读出竖盘读数A,则可得到B点高程:Hb=Hc+DTanA+i-v方法二:采用全站仪三维坐标测量程序功能将全站仪架设在已知高程点C,将棱镜架设在另一已知高程点B在全站仪的功能里面找到:三维坐标测量或者是直角坐标测量然后进入1.建站,按照仪器提示,输入仪器架设的点C的所有已知数据(如果仅已知高程,那就把其他需要输入的项全部架设,仪器高必须用卷尺量取,并真实输入)2.定向,将全站仪望远镜瞄准另一已知高程点B,输入B点所有已知数据后,按确认键完成。
(如果仅已知高程,那就把其他需要输入的项全部架设,棱镜高必须用卷尺量取,并真实输入)3.照准其他任何你想要测量高程的点按测量键,仪器就会显示该待测点的坐标和高程(如果前面建站和定向都用的假设坐标,此处得到的坐标当然也是假定的,但是高程是完全正确的)先输入测站点的高程,再量取仪器高,并输入全站仪中,最后再输入待测点处棱镜杆的高度,然后用全站仪瞄准棱镜中心,点击测量即可。
大数据时代测边后方交汇的计算公式及精度分析
大数据时代测边后方交汇的计算公式及精度分析摘要在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
基于此,本文就针对测边后方交汇的计算公式及精度进行分析研究。
关键词测边后方交汇;计算公式;精度分析前言由于测边后方交会定点具有布点灵活、施测方便、无须已知点之间互相通视且计算简便等优点,尤其在全站仪已普及应用的情况下,优点更为明显。
随着电子技术和计算机技术的发展,全站仪的测角和测距性能得到了很大程度的提高。
很多全站仪的测量、记录、数据预处理、显示等多种模块都向着智能化、集成化的方向发展,这样就大大减少了测设过程中的误差来源,提高了测量数据的精度。
1 测边后方交会定点的计算公式在实际的生产过程中,常常因工期紧,任务重,各项工作交叉进展,导致原有的测量控制点遭到不同程度的破坏,给施工测量工作带来了很大的困难。
例如两控制点不通视,在设备安装时某些部件上的控制点上只能放棱镜而不适宜架设仪器等情况。
以往为了解决工程测量中出现的这些问题,常用极坐标法、直角坐标法、无定向导线法等测设方法来确定加密点,这些方法不但工作量大,而且加密点往往达不到原有控制点的精度[1]。
而传统的后方交会方法是通过在加密点上观测3个已知方向的水平夹角来计算测站的平面坐标,它要求加密点不能位于由3个已知点构成的危险圆附近。
由于这些条件在城市工程测量中较难满足而限制了传统后方交会方法的使用。
为此,本文提出了测边后方交会方法。
它是通过在加密点P上安置全站仪,在已知点A、B上安置反射镜,通过测量水平距离P A、PB和水平角V,计算测站点的平面坐标。
与传统后方交会方法比较,测边后方交会只需要在加密点上观测附近任意两个已知点的水平距离和水平角就可以计算出测站点的坐标。
距离后方交会计算
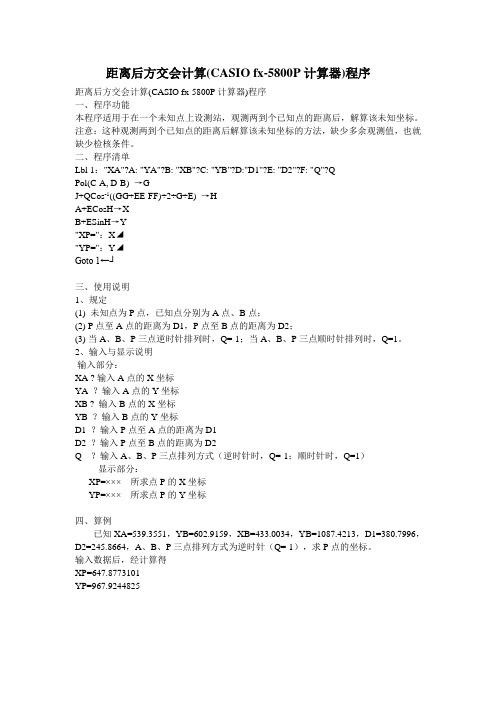
距离后方交会计算(CASIO fx-5800P计算器)程序距离后方交会计算(CASIO fx-5800P计算器)程序一、程序功能本程序适用于在一个未知点上设测站,观测两到个已知点的距离后,解算该未知坐标。
注意:这种观测两到个已知点的距离后解算该未知坐标的方法,缺少多余观测值,也就缺少检核条件。
二、程序清单Lbl 1:"XA"?A: "YA"?B: "XB"?C: "YB"?D:"D1"?E: "D2"?F: "Q"?QPol(C-A, D-B)→GJ+QCos-1((GG+EE-FF)÷2÷G÷E)→HA+ECosH→XB+ESinH→Y"XP=":X◢"YP=":Y◢Goto 1←┘三、使用说明1、规定(1) 未知点为P点,已知点分别为A点、B点;(2) P点至A点的距离为D1,P点至B点的距离为D2;(3) 当A、B、P三点逆时针排列时,Q=-1;当A、B、P三点顺时针排列时,Q=1。
2、输入与显示说明输入部分:XA ? 输入A点的X坐标YA ?输入A点的Y坐标XB ? 输入B点的X坐标YB ?输入B点的Y坐标D1 ?输入P点至A点的距离为D1D2 ?输入P点至B点的距离为D2Q ?输入A、B、P三点排列方式(逆时针时,Q=-1;顺时针时,Q=1)显示部分:XP=×××所求点P的X坐标YP=×××所求点P的Y坐标四、算例已知XA=539.3551,YB=602.9159,XB=433.0034,YB=1087.4213,D1=380.7996,D2=245.8664,A、B、P三点排列方式为逆时针(Q=-1),求P点的坐标。
输入数据后,经计算得XP=647.8773101YP=967.9244825。
后方交会法计算推导公式
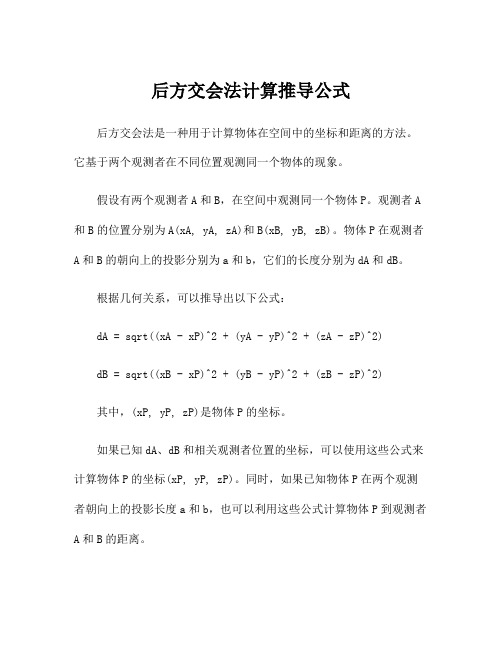
后方交会法计算推导公式后方交会法是一种用于计算物体在空间中的坐标和距离的方法。
它基于两个观测者在不同位置观测同一个物体的现象。
假设有两个观测者A和B,在空间中观测同一个物体P。
观测者A 和B的位置分别为A(xA, yA, zA)和B(xB, yB, zB)。
物体P在观测者A和B的朝向上的投影分别为a和b,它们的长度分别为dA和dB。
根据几何关系,可以推导出以下公式:dA = sqrt((xA - xP)^2 + (yA - yP)^2 + (zA - zP)^2)dB = sqrt((xB - xP)^2 + (yB - yP)^2 + (zB - zP)^2)其中,(xP, yP, zP)是物体P的坐标。
如果已知dA、dB和相关观测者位置的坐标,可以使用这些公式来计算物体P的坐标(xP, yP, zP)。
同时,如果已知物体P在两个观测者朝向上的投影长度a和b,也可以利用这些公式计算物体P到观测者A和B的距离。
需要注意的是,后方交会法在实际应用中可能会受到观测误差的影响,因此在计算时需要考虑这些误差,并采取合适的数据处理和精度控制方法。
拓展:后方交会法是测量和定位的重要方法之一,广泛应用于地理测量、摄影测量、建筑工程等领域。
它可以通过精确的测量和计算,确定物体在三维空间中的准确位置和形状,对于工程设计、地理信息系统等具有重要的实际应用价值。
除了后方交会法,还有其他一些方法可以用于测量和定位物体的坐标和距离,比如三角测量法、三角高程测量法、全站仪测量法等。
每种方法都有其适用的场景和局限性,根据具体的测量需求和条件选择合适的方法是非常重要的。
此外,随着科技的进步和发展,新的测量和定位技术不断涌现,为实现更精确和高效的测量和定位提供了更多的选择。
测边后方交会的直接计算方法
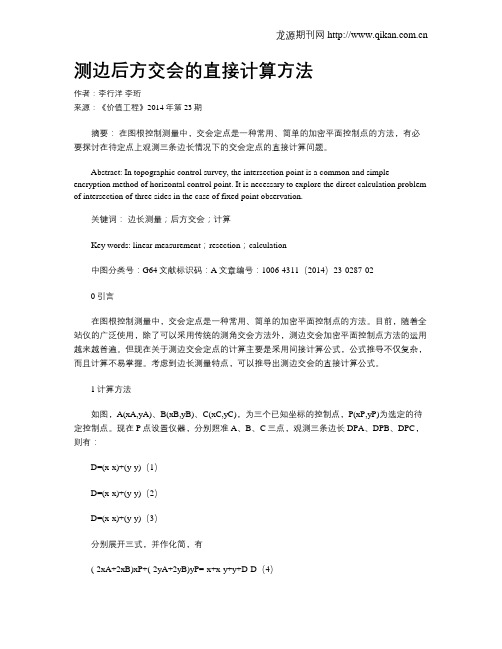
测边后方交会的直接计算方法作者:李行洋李珩来源:《价值工程》2014年第23期摘要:在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法,有必要探讨在待定点上观测三条边长情况下的交会定点的直接计算问题。
Abstract: In topographic control survey, the intersection point is a common and simple encryption method of horizontal control point. It is necessary to explore the direct calculation problem of intersection of three sides in the case of fixed point observation.关键词:边长测量;后方交会;计算Key words: linear measurement;resection;calculation中图分类号:G64文献标识码:A文章编号:1006-4311(2014)23-0287-020引言在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
考虑到边长测量特点,可以推导出测边交会的直接计算公式。
1计算方法如图,A(xA,yA)、B(xB,yB)、C(xC,yC),为三个已知坐标的控制点,P(xP,yP)为选定的待定控制点。
现在P点设置仪器,分别照准A、B、C三点,观测三条边长DPA、DPB、DPC,则有:D=(x-x)+(y-y)(1)D=(x-x)+(y-y)(2)D=(x-x)+(y-y)(3)分别展开三式,并作化简,有(-2xA+2xB)xP+(-2yA+2yB)yP=-x+x-y+y+D-D(4)(-2xA+2xC)xP+(-2yA+2yC)yP=-x+x-y+y+D-D(5)(-2xB+2xC)xP+(-2yB+2yC)yP=-x+x-y+y+D-D(6)显然,由上述三式中的任意两式均可求出P(xP,yP)。
全站仪后方交会法步骤和高程测量步骤

1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB ,则:1)当精度要求不高时:瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。
2)当精度要求高时:——可用测回法(method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。
2、距离测量(distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般:PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数(PPM )(乘常数)的设置。
输入测量时的气温(TEMP )、气压(PRESS ),或经计算后,输入PPM 的值。
(1)功能:可测量平距HD 、高差VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS )。
3、坐标测量(coordinate measurement )(1)功能:可测量目标点的三维坐标(X ,Y ,H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有:高程:(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。
全站仪后方交会法步骤和高程测量步骤

全站仪后方交会法步骤和高程测量步骤集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
利用编程计算器进行距离后方交会的严密平差计算
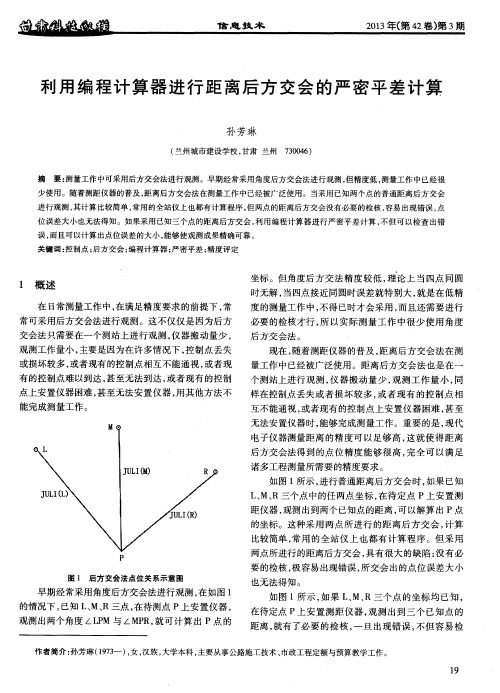
本 论述 采 用测 量业 中广 泛使 用 的 C A S I O编 程计 算 器, 按 条件 平差 的方法进 行 严 密平 差 , 计 算 出交 会 点 的 坐标 , 并进 行精 度 检 核 与 评 定 。在 待 测 点 P处 安 置 仪
器, 观 测 P点到 左边 L点 的距离 J U L I ( L ) 、 中间 M 点 的 距离 J U L I ( M) 和右 边 R点 的距 离 J U L I ( R) 。然 后根 据
L点 的坐标 x( L)、 Y( L ) , M 点 的坐 标 x( M)、 Y( M)
和 R点的坐标 x ( R )、 Y ( R ), 就可以平差计算 出 P点
的坐 标 x p、 Y p , 并进 行精 度评 定 。
信 息技 术
2 0 1 3 年( 第4 2 卷) 第3 期
利 用 编 程计 算 器 进 行 距 离后 方 交会 的严 密 平差 计 算
孙芳琳
( 兰州城市建设学校 , 甘肃 兰州 7 3 0 0 4 6 )
摘
要: 测量工作 中可采用后方交会法进行观测 。早期经 常采用 角度后方交会法进行观测 , 但精 度低 , 测量位 中误 差 D I A N WE I
WU C H A及交 会 点 P的坐标 X p、 Y p 。
5 算例
已知 三 点 L ( 4 2 1 2 . 7 6 3 , 6 6 1 5 . 3 9 0 ) 、 M( 4 6 2 3 . 8 7 5 , 5 4 4 3 . 2 8 5 ) 、 R( 5 7 4 2 . 2 8 5, 5 8 3 5 . 4 1 0 ) 。测 得 P点 到 左
少使用 。随着测距仪器 的普及 , 距离后方交会法在测量工作 中已经被 广泛使用 。当采用 已知两个点的普通距离后 方交会 进行观测 , 其计算 比较简单 , 常用 的全站 仪上也都 有计算程序 , 但 两点 的距 离后 方交会没有必要的检核 , 容 易出现错误 , 点 位误差 大小 也无 法得 知。如果 采用 已知三个点的距离后方交会 , 利用 编程计算器 进行严密 平差计算 , 不但 可 以检查 出错 误, 而且可以计算 出点位误差的大小 , 能够使观测成果精确可靠 。 关键词 : 控制点 ; 后方交会 ; 编程计算器 ; 严 密平差 ; 精度评定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
距离后方交会计算(CASIO fx-4800P计算器)程序
距离后方交会计算(CASIO fx-4800P计算器)程序
一、程序功能
本程序适用于在一个未知点上设测站,观测两到个已知点的距离后,解算该未知坐标。
本程序也可以在CASIO fx-4500P计算器及CASIO fx-4850P计算器上运行。
二、源程序
Lbl 1:{ABCDEFQ}:A"XA":B” YA”:C"XB":D"YB":E"D1":F"D2":Q:J=0:G=Pol(C-A, D-B) :H=J+QCos-1((GG+EE-FF)÷2÷G÷E):X"XP"=A+ECosH◢Y"YP"=B+ESinH◢
Goto 1←┘
注:CASIO fx-4850改如下
Lbl 1:{ABCDEFQ}:A"XA":B” YA”:C"XB":D"YB":E"D1":F"D2":Q:J=0:G=Pol(C-A, D-B) :H=J+QCos-1((GG+EE-FF)÷2÷G÷E):"XP":X=A+ECosH◢"YP":Y=B+ESinH◢
Goto 1←┘
三、使用说明
1、规定
(1) 未知点为P点,已知点分别为A点、B点;
(2) P点至A点的距离为D1,P点至B点的距离为D2;
(3) 当A、B、P三点逆时针排列时,Q=-1;当A、B、P三点顺时针排列时,Q=1。
2、输入与显示说明
输入部分:
XA ? 输入A点的X坐标
YA ?输入A点的Y坐标
XB ? 输入B点的X坐标
YB ?输入B点的Y坐标
D1 ?输入P点至A点的距离为D1
D2 ?输入P点至B点的距离为D2
Q ?输入A、B、P三点排列方式(逆时针时,Q=-1;顺时针时,Q=1)显示部分:
XP=×××所求点P的X坐标
YP=×××所求点P的Y坐标
四、算例
已知XA=539.3551,YB=602.9159,Xb=433.0034,YB=1087.4213,
D1=380.7996,D2=245.8664,A、B、P三点排列方式为逆时针(Q=-1),求P点的坐标。
输入数据后,经计算得
XP=647.8773101
YP=967.9244825。