ABSTRACT AWESIM THE INTEGRATED SIMULATION SYSTEM
空间电压矢量PWM控制的优化算法及其仿真实现
2006年第21卷第4期 电 力 学 报 Vol.21No.42006 (总第77期) J OU RNAL OF EL ECTRIC POWER (Sum.77)文章编号: 1005-6548(2006)04-0444-04空间电压矢量PWM控制的优化算法及其仿真实现Ξ马 洁1, 吴丽静2, 徐忆平1(1.中国矿业大学信电学院,江苏徐州 221008;2.聊城供电公司,山东聊城 225000)An Optimization and Its Simulation Algorithm for Space2vector PWMMA Jie1, WU Li2jing2, XU Y i2ping1(rmation and Electrical Engineering Institute,University of Mining and Technology,Xuahou 221008,China;2.Liaocheng Power Company,Liaocheng 225000,China)摘 要: 基于传统三电平逆变器空间电压矢量PWM技术的研究经验,提出了1种优化的空间电压矢量PWM控制算法。
该方法是将参考电压矢量分解成基矢量和二电平矢量,然后利用二电平的空间矢量调制算法来控制二电平分量,因此简化了建模过程,提高了仿真效率。
最后,在Matlab/ Simulink环境下分别对传统算法和优化算法进行仿真,比较后验证了优化算法的可行性和优越性。
关键词: 逆变器;三电平;空间矢量脉宽调制中图分类号: TM464 文献标识码: A Abstract: This paper proposes an optimization space2vector pulse width modulation on the basis of traditional three2level PWM method.With this method,the reference voltage vector is divided into two parts:based vector and two2level vector,then the two2level vector is synthesized by conventional two2level space vector modulation method,so the process of modeling is simplified and the simulation is accelerated.To verify the superiority and effective2 ness of this optimization algorithm,the traditional modulation algorithm and the new algorithm simula2 tion is implemented respectively under Matlab/Simulink environment.The simulating results are analyzed and compared.K ey Words: inverter;three2level;space vector palse width modulation为解决低电压主开关器件在高电压应用情况下的矛盾,多电平逆变技术的出现为高压大容量电压型变换器的研制开辟了1条新的思路。
用于神经形态计算的全光子调制异质结构

用于神经形态计算的全光子调制异质结构下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!用于神经形态计算的全光子调制异质结构引言在神经形态计算领域,光子学作为一种新兴技术,展示出在处理大规模神经网络和信息处理方面的潜力。
远程制备双原子纠缠态(英文)
远程制备双原子纠缠态(英文)
陈美锋;马宋设
【期刊名称】《光子学报》
【年(卷),期】2008(37)1
【摘要】提出一种远程制备双原子纠缠态的方案,该方案基于两个原子与单模腔场的同时非共振相互作用.由于双粒子纠缠态比三粒子纠缠态容易制备,方案用两对双原子纠缠态作为量子通道.Alice拥有的两个相同原子同时与一单模腔场非共振相互作用.Alice已知她要制备的纠缠态,她选择适当的相互作用时间、测量她所拥有的两个原子并通过经典通道通知Bob.Bob引入一个相同的辅助原子和一个单模腔场来实现方案.方案对腔场状态和腔损耗不敏感,基于当前的腔QED技术,方案能在实验上实现.该方案有望在量子信息过程中有重要的应用价值.
【总页数】4页(P188-191)
【关键词】量子信息;双原子纠缠态;远程态制备;非共振相互作用
【作者】陈美锋;马宋设
【作者单位】福州大学电子科学与应用物理系
【正文语种】中文
【中图分类】O431.2
【相关文献】
1.W态纠缠实现双腔远程控制原子的非经典特性 [J], 郭耀武;周原;邵凤兰
2.利用三个原子同时与单模腔场相互作用制备原子的纠缠态(英文) [J], 向少华;郑
彩云
3.利用原子-腔场喇曼相互作用制备纠缠压缩真空态(英文) [J], 蔡新华
4.确定性联合远程制备任意四粒子Genuine纠缠态(英文) [J], 李剑;聂金瑞;赵培均;李睿凡;邹永忠
5.利用双光子J-C模制备三原子的W纠缠态(英文) [J], 杨雄;向绍华;宋克慧
因版权原因,仅展示原文概要,查看原文内容请购买。
SimulationX与AEMsim
分析的图形
台上实现了多学科领域的系统工程
的建模和仿真:机械,液压,热等物理领域。不同领域的模块之间可以直接进行物理连接。
TypeDesigner:基于最先进的多物理领仿真语言Modelica,最灵活建模工具,可以在用户指南的帮助
下轻松编写自已的算法或数学方程组。更多,更灵活,独特的参数概念、输入和变量。
SimulationX与AEMsim对比评估
软件
评估项
SimulationX
AMEsim
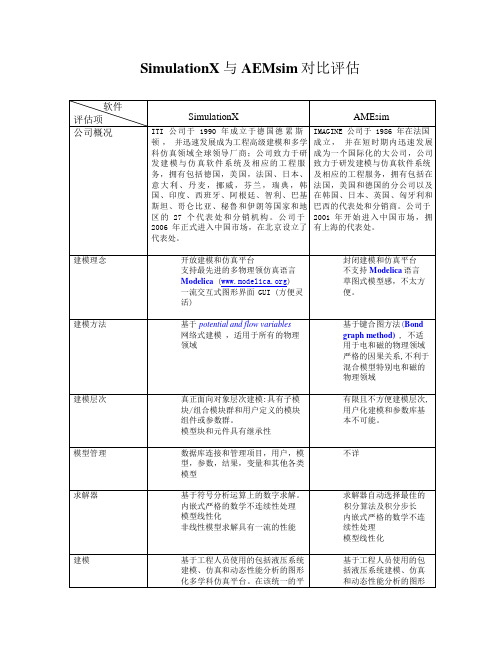
公司概况
ITI公司于1990年成立于德国德累斯
顿,并迅速发展成为工程高级建模和多学科仿真领域全球领导厂商;公司致力于研发建模与仿真软件系统及相应的工程服
务,拥有包括德国,美国,法国、日本、意大利、丹麦,挪威,芬兰,瑞典,韩国、印度、西班牙、阿根廷、智利、巴基斯坦、哥仑比亚、秘鲁和伊朗等国家和地区的27个代表处和分销机构。公司于
2006年正式进入中国市场,在北京设立了代表处。
IMAGINE公司于1986年在法国
成立,并在短时期内迅速发展成为一个国际化的大公司,公司致力于研发建模与仿真软件系统
及相应的工程服务,拥有包括在法国,美国和德国的分公司以及在韩国、日本、英国、匈牙利和巴西的代表处和分销商。公司于
SCI论文摘要中常用的表达方法
SCI论文摘要中常用的表达方法要写好摘要,需要建立一个适合自己需要的句型库(选择的词汇来源于SCI高被引用论文)引言部分(1)回顾研究背景,常用词汇有review, summarize, present, outline, describe等(2)说明写作目的,常用词汇有purpose, attempt, aim等,另外还可以用动词不定式充当目的壮语老表达(3)介绍论文的重点内容或研究范围,常用词汇有study, present, include, focus, emphasize, emphasis, attention等方法部分(1)介绍研究或试验过程,常用词汇有test study, investigate, examine,experiment, discuss, consider, analyze, analysis等(2)说明研究或试验方法,常用词汇有measure, estimate, calculate等(3)介绍应用、用途,常用词汇有use, apply, application等结果部分(1)展示研究结果,常用词汇有show, result, present等(2)介绍结论,常用词汇有summary, introduce,conclude等讨论部分(1)陈述论文的论点和作者的观点,常用词汇有suggest, repot, present, expect, describe 等(2)说明论证,常用词汇有support, provide, indicate, identify, find, demonstrate, confirm, clarify等(3)推荐和建议,常用词汇有suggest,suggestion, recommend, recommendation, propose,necessity,necessary,expect等。
摘要引言部分案例词汇review•Author(s): ROBINSON, TE; BERRIDGE, KC•Title:THE NEURAL BASIS OF DRUG CRA VING - AN INCENTIVE-SENSITIZATION THEORY OF ADDICTION•Source: BRAIN RESEARCH REVIEWS, 18 (3): 247-291 SEP-DEC 1993 《脑研究评论》荷兰SCI被引用1774We review evidence for this view of addiction and discuss its implications for understanding the psychology and neurobiology of addiction.回顾研究背景SCI高被引摘要引言部分案例词汇summarizeAuthor(s): Barnett, RM; Carone, CD; 被引用1571Title: Particles and field .1. Review of particle physicsSource: PHYSICAL REVIEW D, 54 (1): 1-+ Part 1 JUL 1 1996:《物理学评论,D辑》美国引言部分回顾研究背景常用词汇summarizeAbstract: This biennial review summarizes much of Particle Physics. Using data from previous editions, plus 1900 new measurements from 700 papers, we list, evaluate, and average measuredproperties of gauge bosons, leptons, quarks, mesons, and baryons. We also summarize searches for hypothetical particles such as Higgs bosons, heavy neutrinos, and supersymmetric particles. All the particle properties and search limits are listed in Summary Tables. We also give numerous tables, figures, formulae, and reviews of topics such as the Standard Model, particle detectors, probability, and statistics. A booklet is available containing the Summary Tables and abbreviated versions of some of the other sections of this full Review.SCI摘要引言部分案例attentionSCI摘要方法部分案例considerSCI高被引摘要引言部分案例词汇outline•Author(s): TIERNEY, L SCI引用728次•Title:MARKOV-CHAINS FOR EXPLORING POSTERIOR DISTRIBUTIONS 引言部分回顾研究背景,常用词汇outline•Source: ANNALS OF STATISTICS, 22 (4): 1701-1728 DEC 1994•《统计学纪事》美国•Abstract: Several Markov chain methods are available for sampling from a posterior distribution. Two important examples are the Gibbs sampler and the Metropolis algorithm.In addition, several strategies are available for constructing hybrid algorithms. This paper outlines some of the basic methods and strategies and discusses some related theoretical and practical issues. On the theoretical side, results from the theory of general state space Markov chains can be used to obtain convergence rates, laws of large numbers and central limit theorems for estimates obtained from Markov chain methods. These theoretical results can be used to guide the construction of more efficient algorithms. For the practical use of Markov chain methods, standard simulation methodology provides several Variance reduction techniques and also gives guidance on the choice of sample size and allocation.SCI高被引摘要引言部分案例回顾研究背景presentAuthor(s): L YNCH, M; MILLIGAN, BG SC I被引用661Title: ANAL YSIS OF POPULATION GENETIC-STRUCTURE WITH RAPD MARKERS Source: MOLECULAR ECOLOGY, 3 (2): 91-99 APR 1994《分子生态学》英国Abstract: Recent advances in the application of the polymerase chain reaction make it possible to score individuals at a large number of loci. The RAPD (random amplified polymorphic DNA) method is one such technique that has attracted widespread interest.The analysis of population structure with RAPD data is hampered by the lack of complete genotypic information resulting from dominance, since this enhances the sampling variance associated with single loci as well as induces bias in parameter estimation. We present estimators for several population-genetic parameters (gene and genotype frequencies, within- and between-population heterozygosities, degree of inbreeding and population subdivision, and degree of individual relatedness) along with expressions for their sampling variances. Although completely unbiased estimators do not appear to be possible with RAPDs, several steps are suggested that will insure that the bias in parameter estimates is negligible. To achieve the same degree of statistical power, on the order of 2 to 10 times more individuals need to be sampled per locus when dominant markers are relied upon, as compared to codominant (RFLP, isozyme) markers. Moreover, to avoid bias in parameter estimation, the marker alleles for most of these loci should be in relatively low frequency. Due to the need for pruning loci with low-frequency null alleles, more loci also need to be sampled with RAPDs than with more conventional markers, and sole problems of bias cannot be completely eliminated.SCI高被引摘要引言部分案例词汇describe•Author(s): CLONINGER, CR; SVRAKIC, DM; PRZYBECK, TR•Title: A PSYCHOBIOLOGICAL MODEL OF TEMPERAMENT AND CHARACTER•Source: ARCHIVES OF GENERAL PSYCHIATRY, 50 (12): 975-990 DEC 1993《普通精神病学纪要》美国•引言部分回顾研究背景,常用词汇describe 被引用926•Abstract: In this study, we describe a psychobiological model of the structure and development of personality that accounts for dimensions of both temperament and character. Previous research has confirmed four dimensions of temperament: novelty seeking, harm avoidance, reward dependence, and persistence, which are independently heritable, manifest early in life, and involve preconceptual biases in perceptual memory and habit formation. For the first time, we describe three dimensions of character that mature in adulthood and influence personal and social effectiveness by insight learning about self-concepts.Self-concepts vary according to the extent to which a person identifies the self as (1) an autonomous individual, (2) an integral part of humanity, and (3) an integral part of the universe as a whole. Each aspect of self-concept corresponds to one of three character dimensions called self-directedness, cooperativeness, and self-transcendence, respectively. We also describe the conceptual background and development of a self-report measure of these dimensions, the Temperament and Character Inventory. Data on 300 individuals from the general population support the reliability and structure of these seven personality dimensions. We discuss the implications for studies of information processing, inheritance, development, diagnosis, and treatment.摘要引言部分案例•(2)说明写作目的,常用词汇有purpose, attempt, aimSCI高被引摘要引言部分案例attempt说明写作目的•Author(s): Donoho, DL; Johnstone, IM•Title: Adapting to unknown smoothness via wavelet shrinkage•Source: JOURNAL OF THE AMERICAN STATISTICAL ASSOCIATION, 90 (432): 1200-1224 DEC 1995 《美国统计学会志》被引用429次•Abstract: We attempt to recover a function of unknown smoothness from noisy sampled data. We introduce a procedure, SureShrink, that suppresses noise by thresholding the empirical wavelet coefficients. The thresholding is adaptive: A threshold level is assigned to each dyadic resolution level by the principle of minimizing the Stein unbiased estimate of risk (Sure) for threshold estimates. The computational effort of the overall procedure is order N.log(N) as a function of the sample size N. SureShrink is smoothness adaptive: If the unknown function contains jumps, then the reconstruction (essentially) does also; if the unknown function has a smooth piece, then the reconstruction is (essentially) as smooth as the mother wavelet will allow. The procedure is in a sense optimally smoothness adaptive: It is near minimax simultaneously over a whole interval of the Besov scale; the size of this interval depends on the choice of mother wavelet. We know from a previous paper by the authors that traditional smoothing methods-kernels, splines, and orthogonal series estimates-even with optimal choices of the smoothing parameter, would be unable to perform in a near-minimax way over many spaces in the Besov scale.Examples of SureShrink are given. The advantages of the method are particularly evident when the underlying function has jump discontinuities on a smooth backgroundSCI高被引摘要引言部分案例To investigate说明写作目的•Author(s): OLTV AI, ZN; MILLIMAN, CL; KORSMEYER, SJ•Title: BCL-2 HETERODIMERIZES IN-VIVO WITH A CONSERVED HOMOLOG, BAX, THAT ACCELERATES PROGRAMMED CELL-DEATH•Source: CELL, 74 (4): 609-619 AUG 27 1993 被引用3233•Abstract: Bcl-2 protein is able to repress a number of apoptotic death programs. To investigate the mechanism of Bcl-2's effect, we examined whether Bcl-2 interacted with other proteins. We identified an associated 21 kd protein partner, Bax, that has extensive amino acid homology with Bcl-2, focused within highly conserved domains I and II. Bax is encoded by six exons and demonstrates a complex pattern of alternative RNA splicing that predicts a 21 kd membrane (alpha) and two forms of cytosolic protein (beta and gamma). Bax homodimerizes and forms heterodimers with Bcl-2 in vivo. Overexpressed Bax accelerates apoptotic death induced by cytokine deprivation in an IL-3-dependent cell line. Overexpressed Bax also counters the death repressor activity of Bcl-2. These data suggest a model in which the ratio of Bcl-2 to Bax determines survival or death following an apoptotic stimulus.SCI高被引摘要引言部分案例purposes说明写作目的•Author(s): ROGERS, FJ; IGLESIAS, CA•Title: RADIATIVE ATOMIC ROSSELAND MEAN OPACITY TABLES•Source: ASTROPHYSICAL JOURNAL SUPPLEMENT SERIES, 79 (2): 507-568 APR 1992 《天体物理学杂志增刊》美国SCI被引用512•Abstract: For more than two decades the astrophysics community has depended on opacity tables produced at Los Alamos. In the present work we offer new radiative Rosseland mean opacity tables calculated with the OPAL code developed independently at LLNL. We give extensive results for the recent Anders-Grevesse mixture which allow accurate interpolation in temperature, density, hydrogen mass fraction, as well as metal mass fraction. The tables are organized differently from previous work. Instead of rows and columns of constant temperature and density, we use temperature and follow tracks of constant R, where R = density/(temperature)3. The range of R and temperature are such as to cover typical stellar conditions from the interior through the envelope and the hotter atmospheres. Cool atmospheres are not considered since photoabsorption by molecules is neglected. Only radiative processes are taken into account so that electron conduction is not included. For comparison purposes we present some opacity tables for the Ross-Aller and Cox-Tabor metal abundances. Although in many regions the OPAL opacities are similar to previous work, large differences are reported.For example, factors of 2-3 opacity enhancements are found in stellar envelop conditions.SCI高被引摘要引言部分案例aim说明写作目的•Author(s):EDV ARDSSON, B; ANDERSEN, J; GUSTAFSSON, B; LAMBERT, DL;NISSEN, PE; TOMKIN, J•Title:THE CHEMICAL EVOLUTION OF THE GALACTIC DISK .1. ANALYSISAND RESULTS•Source: ASTRONOMY AND ASTROPHYSICS, 275 (1): 101-152 AUG 1993 《天文学与天体物理学》被引用934•Abstract:With the aim to provide observational constraints on the evolution of the galactic disk, we have derived abundances of 0, Na, Mg, Al, Si, Ca, Ti, Fe, Ni, Y, Zr, Ba and Nd, as well as individual photometric ages, for 189 nearby field F and G disk dwarfs.The galactic orbital properties of all stars have been derived from accurate kinematic data, enabling estimates to be made of the distances from the galactic center of the stars‘ birthplaces. 结构式摘要•Our extensive high resolution, high S/N, spectroscopic observations of carefully selected northern and southern stars provide accurate equivalent widths of up to 86 unblended absorption lines per star between 5000 and 9000 angstrom. The abundance analysis was made with greatly improved theoretical LTE model atmospheres. Through the inclusion of a great number of iron-peak element absorption lines the model fluxes reproduce the observed UV and visual fluxes with good accuracy. A new theoretical calibration of T(eff) as a function of Stromgren b - y for solar-type dwarfs has been established. The new models and T(eff) scale are shown to yield good agreement between photometric and spectroscopic measurements of effective temperatures and surface gravities, but the photometrically derived very high overall metallicities for the most metal rich stars are not supported by the spectroscopic analysis of weak spectral lines.•Author(s): PAYNE, MC; TETER, MP; ALLAN, DC; ARIAS, TA; JOANNOPOULOS, JD•Title:ITERA TIVE MINIMIZATION TECHNIQUES FOR ABINITIO TOTAL-ENERGY CALCULATIONS - MOLECULAR-DYNAMICS AND CONJUGA TE GRADIENTS•Source: REVIEWS OF MODERN PHYSICS, 64 (4): 1045-1097 OCT 1992 《现代物理学评论》美国American Physical Society SCI被引用2654 •Abstract: This article describes recent technical developments that have made the total-energy pseudopotential the most powerful ab initio quantum-mechanical modeling method presently available. In addition to presenting technical details of the pseudopotential method, the article aims to heighten awareness of the capabilities of the method in order to stimulate its application to as wide a range of problems in as many scientific disciplines as possible.SCI高被引摘要引言部分案例includes介绍论文的重点内容或研究范围•Author(s):MARCHESINI, G; WEBBER, BR; ABBIENDI, G; KNOWLES, IG;SEYMOUR, MH; STANCO, L•Title: HERWIG 5.1 - A MONTE-CARLO EVENT GENERA TOR FOR SIMULATING HADRON EMISSION REACTIONS WITH INTERFERING GLUONS SCI被引用955次•Source: COMPUTER PHYSICS COMMUNICATIONS, 67 (3): 465-508 JAN 1992:《计算机物理学通讯》荷兰Elsevier•Abstract: HERWIG is a general-purpose particle-physics event generator, which includes the simulation of hard lepton-lepton, lepton-hadron and hadron-hadron scattering and soft hadron-hadron collisions in one package. It uses the parton-shower approach for initial-state and final-state QCD radiation, including colour coherence effects and azimuthal correlations both within and between jets. This article includes a brief review of the physics underlying HERWIG, followed by a description of the program itself. This includes details of the input and control parameters used by the program, and the output data provided by it. Sample output from a typical simulation is given and annotated.SCI高被引摘要引言部分案例presents介绍论文的重点内容或研究范围•Author(s): IDSO, KE; IDSO, SB•Title: PLANT-RESPONSES TO ATMOSPHERIC CO2 ENRICHMENT IN THE FACE OF ENVIRONMENTAL CONSTRAINTS - A REVIEW OF THE PAST 10 YEARS RESEARCH•Source: AGRICULTURAL AND FOREST METEOROLOGY, 69 (3-4): 153-203 JUL 1994 《农业和林业气象学》荷兰Elsevier 被引用225•Abstract:This paper presents a detailed analysis of several hundred plant carbon exchange rate (CER) and dry weight (DW) responses to atmospheric CO2 enrichment determined over the past 10 years. It demonstrates that the percentage increase in plant growth produced by raising the air's CO2 content is generally not reduced by less than optimal levels of light, water or soil nutrients, nor by high temperatures, salinity or gaseous air pollution. More often than not, in fact, the data show the relative growth-enhancing effects of atmospheric CO2 enrichment to be greatest when resource limitations and environmental stresses are most severe.SCI高被引摘要引言部分案例介绍论文的重点内容或研究范围emphasizing •Author(s): BESAG, J; GREEN, P; HIGDON, D; MENGERSEN, K•Title: BAYESIAN COMPUTATION AND STOCHASTIC-SYSTEMS•Source: STATISTICAL SCIENCE, 10 (1): 3-41 FEB 1995《统计科学》美国•SCI被引用296次•Abstract: Markov chain Monte Carlo (MCMC) methods have been used extensively in statistical physics over the last 40 years, in spatial statistics for the past 20 and in Bayesian image analysis over the last decade. In the last five years, MCMC has been introduced into significance testing, general Bayesian inference and maximum likelihood estimation. This paper presents basic methodology of MCMC, emphasizing the Bayesian paradigm, conditional probability and the intimate relationship with Markov random fields in spatial statistics.Hastings algorithms are discussed, including Gibbs, Metropolis and some other variations. Pairwise difference priors are described and are used subsequently in three Bayesian applications, in each of which there is a pronounced spatial or temporal aspect to the modeling. The examples involve logistic regression in the presence of unobserved covariates and ordinal factors; the analysis of agricultural field experiments, with adjustment for fertility gradients; and processing oflow-resolution medical images obtained by a gamma camera. Additional methodological issues arise in each of these applications and in the Appendices. The paper lays particular emphasis on the calculation of posterior probabilities and concurs with others in its view that MCMC facilitates a fundamental breakthrough in applied Bayesian modeling.SCI高被引摘要引言部分案例介绍论文的重点内容或研究范围focuses •Author(s): HUNT, KJ; SBARBARO, D; ZBIKOWSKI, R; GAWTHROP, PJ•Title: NEURAL NETWORKS FOR CONTROL-SYSTEMS - A SURVEY•Source: AUTOMA TICA, 28 (6): 1083-1112 NOV 1992《自动学》荷兰Elsevier•SCI被引用427次•Abstract:This paper focuses on the promise of artificial neural networks in the realm of modelling, identification and control of nonlinear systems. The basic ideas and techniques of artificial neural networks are presented in language and notation familiar to control engineers. Applications of a variety of neural network architectures in control are surveyed. We explore the links between the fields of control science and neural networks in a unified presentation and identify key areas for future research.SCI高被引摘要引言部分案例介绍论文的重点内容或研究范围focus•Author(s): Stuiver, M; Reimer, PJ; Bard, E; Beck, JW;•Title: INTCAL98 radiocarbon age calibration, 24,000-0 cal BP•Source: RADIOCARBON, 40 (3): 1041-1083 1998《放射性碳》美国SCI被引用2131次•Abstract: The focus of this paper is the conversion of radiocarbon ages to calibrated (cal) ages for the interval 24,000-0 cal BP (Before Present, 0 cal BP = AD 1950), based upon a sample set of dendrochronologically dated tree rings, uranium-thorium dated corals, and varve-counted marine sediment. The C-14 age-cal age information, produced by many laboratories, is converted to Delta(14)C profiles and calibration curves, for the atmosphere as well as the oceans. We discuss offsets in measured C-14 ages and the errors therein, regional C-14 age differences, tree-coral C-14 age comparisons and the time dependence of marine reservoir ages, and evaluate decadal vs. single-year C-14 results. Changes in oceanic deepwater circulation, especially for the 16,000-11,000 cal sp interval, are reflected in the Delta(14)C values of INTCAL98.SCI高被引摘要引言部分案例介绍论文的重点内容或研究范围emphasis •Author(s): LEBRETON, JD; BURNHAM, KP; CLOBERT, J; ANDERSON, DR•Title: MODELING SURVIV AL AND TESTING BIOLOGICAL HYPOTHESES USING MARKED ANIMALS - A UNIFIED APPROACH WITH CASE-STUDIES •Source: ECOLOGICAL MONOGRAPHS, 62 (1): 67-118 MAR 1992•《生态学论丛》美国•Abstract: The understanding of the dynamics of animal populations and of related ecological and evolutionary issues frequently depends on a direct analysis of life history parameters. For instance, examination of trade-offs between reproduction and survival usually rely on individually marked animals, for which the exact time of death is most often unknown, because marked individuals cannot be followed closely through time.Thus, the quantitative analysis of survival studies and experiments must be based oncapture-recapture (or resighting) models which consider, besides the parameters of primary interest, recapture or resighting rates that are nuisance parameters. 结构式摘要•T his paper synthesizes, using a common framework, these recent developments together with new ones, with an emphasis on flexibility in modeling, model selection, and the analysis of multiple data sets. The effects on survival and capture rates of time, age, and categorical variables characterizing the individuals (e.g., sex) can be considered, as well as interactions between such effects. This "analysis of variance" philosophy emphasizes the structure of the survival and capture process rather than the technical characteristics of any particular model. The flexible array of models encompassed in this synthesis uses a common notation. As a result of the great level of flexibility and relevance achieved, the focus is changed from fitting a particular model to model building and model selection.SCI摘要方法部分案例•方法部分•(1)介绍研究或试验过程,常用词汇有test,study, investigate, examine,experiment, discuss, consider, analyze, analysis等•(2)说明研究或试验方法,常用词汇有measure, estimate, calculate等•(3)介绍应用、用途,常用词汇有use, apply, application等SCI高被引摘要方法部分案例discusses介绍研究或试验过程•Author(s): LIANG, KY; ZEGER, SL; QAQISH, B•Title: MULTIV ARIATE REGRESSION-ANAL YSES FOR CATEGORICAL-DATA •Source:JOURNAL OF THE ROY AL STA TISTICAL SOCIETY SERIES B-METHODOLOGICAL, 54 (1): 3-40 1992《皇家统计学会志,B辑:统计方法论》•SCI被引用298•Abstract: It is common to observe a vector of discrete and/or continuous responses in scientific problems where the objective is to characterize the dependence of each response on explanatory variables and to account for the association between the outcomes. The response vector can comprise repeated observations on one variable, as in longitudinal studies or genetic studies of families, or can include observations for different variables.This paper discusses a class of models for the marginal expectations of each response and for pairwise associations. The marginal models are contrasted with log-linear models.Two generalized estimating equation approaches are compared for parameter estimation.The first focuses on the regression parameters; the second simultaneously estimates the regression and association parameters. The robustness and efficiency of each is discussed.The methods are illustrated with analyses of two data sets from public health research SCI高被引摘要方法部分案例介绍研究或试验过程examines•Author(s): Huo, QS; Margolese, DI; Stucky, GD•Title: Surfactant control of phases in the synthesis of mesoporous silica-based materials •Source: CHEMISTRY OF MATERIALS, 8 (5): 1147-1160 MAY 1996•SCI被引用643次《材料的化学性质》美国•Abstract: The low-temperature formation of liquid-crystal-like arrays made up of molecular complexes formed between molecular inorganic species and amphiphilic organic molecules is a convenient approach for the synthesis of mesostructure materials.This paper examines how the molecular shapes of covalent organosilanes, quaternary ammonium surfactants, and mixed surfactants in various reaction conditions can be used to synthesize silica-based mesophase configurations, MCM-41 (2d hexagonal, p6m), MCM-48 (cubic Ia3d), MCM-50 (lamellar), SBA-1 (cubic Pm3n), SBA-2 (3d hexagonal P6(3)/mmc), and SBA-3(hexagonal p6m from acidic synthesis media). The structural function of surfactants in mesophase formation can to a first approximation be related to that of classical surfactants in water or other solvents with parallel roles for organic additives. The effective surfactant ion pair packing parameter, g = V/alpha(0)l, remains a useful molecular structure-directing index to characterize the geometry of the mesophase products, and phase transitions may be viewed as a variation of g in the liquid-crystal-Like solid phase. Solvent and cosolvent structure direction can be effectively used by varying polarity, hydrophobic/hydrophilic properties and functionalizing the surfactant molecule, for example with hydroxy group or variable charge. Surfactants and synthesis conditions can be chosen and controlled to obtain predicted silica-based mesophase products. A room-temperature synthesis of the bicontinuous cubic phase, MCM-48, is presented. A low-temperature (100 degrees C) and low-pH (7-10) treatment approach that can be used to give MCM-41 with high-quality, large pores (up to 60 Angstrom), and pore volumes as large as 1.6 cm(3)/g is described.Estimates 介绍研究或试验过程SCI高被引摘要方法部分案例•Author(s): KESSLER, RC; MCGONAGLE, KA; ZHAO, SY; NELSON, CB; HUGHES, M; ESHLEMAN, S; WITTCHEN, HU; KENDLER, KS•Title:LIFETIME AND 12-MONTH PREV ALENCE OF DSM-III-R PSYCHIATRIC-DISORDERS IN THE UNITED-STA TES - RESULTS FROM THE NATIONAL-COMORBIDITY-SURVEY•Source: ARCHIVES OF GENERAL PSYCHIATRY, 51 (1): 8-19 JAN 1994•《普通精神病学纪要》美国SCI被引用4350次•Abstract: Background: This study presents estimates of lifetime and 12-month prevalence of 14 DSM-III-R psychiatric disorders from the National Comorbidity Survey, the first survey to administer a structured psychiatric interview to a national probability sample in the United States.Methods: The DSM-III-R psychiatric disorders among persons aged 15 to 54 years in the noninstitutionalized civilian population of the United States were assessed with data collected by lay interviewers using a revised version of the Composite International Diagnostic Interview. Results: Nearly 50% of respondents reported at least one lifetime disorder, and close to 30% reported at least one 12-month disorder. The most common disorders were major depressive episode, alcohol dependence, social phobia, and simple phobia. More than half of all lifetime disorders occurred in the 14% of the population who had a history of three or more comorbid disorders. These highly comorbid people also included the vast majority of people with severe disorders.Less than 40% of those with a lifetime disorder had ever received professional treatment,and less than 20% of those with a recent disorder had been in treatment during the past 12 months. Consistent with previous risk factor research, it was found that women had elevated rates of affective disorders and anxiety disorders, that men had elevated rates of substance use disorders and antisocial personality disorder, and that most disorders declined with age and with higher socioeconomic status. Conclusions: The prevalence of psychiatric disorders is greater than previously thought to be the case. Furthermore, this morbidity is more highly concentrated than previously recognized in roughly one sixth of the population who have a history of three or more comorbid disorders. This suggests that the causes and consequences of high comorbidity should be the focus of research attention. The majority of people with psychiatric disorders fail to obtain professional treatment. Even among people with a lifetime history of three or more comorbid disorders, the proportion who ever obtain specialty sector mental health treatment is less than 50%.These results argue for the importance of more outreach and more research on barriers to professional help-seekingSCI高被引摘要方法部分案例说明研究或试验方法measure•Author(s): Schlegel, DJ; Finkbeiner, DP; Davis, M•Title:Maps of dust infrared emission for use in estimation of reddening and cosmic microwave background radiation foregrounds•Source: ASTROPHYSICAL JOURNAL, 500 (2): 525-553 Part 1 JUN 20 1998 SCI 被引用2972 次《天体物理学杂志》美国•The primary use of these maps is likely to be as a new estimator of Galactic extinction. To calibrate our maps, we assume a standard reddening law and use the colors of elliptical galaxies to measure the reddening per unit flux density of 100 mu m emission. We find consistent calibration using the B-R color distribution of a sample of the 106 brightest cluster ellipticals, as well as a sample of 384 ellipticals with B-V and Mg line strength measurements. For the latter sample, we use the correlation of intrinsic B-V versus Mg, index to tighten the power of the test greatly. We demonstrate that the new maps are twice as accurate as the older Burstein-Heiles reddening estimates in regions of low and moderate reddening. The maps are expected to be significantly more accurate in regions of high reddening. These dust maps will also be useful for estimating millimeter emission that contaminates cosmic microwave background radiation experiments and for estimating soft X-ray absorption. We describe how to access our maps readily for general use.SCI高被引摘要结果部分案例application介绍应用、用途•Author(s): MALLAT, S; ZHONG, S•Title: CHARACTERIZATION OF SIGNALS FROM MULTISCALE EDGES•Source: IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, 14 (7): 710-732 JUL 1992•SCI被引用508次《IEEE模式分析与机器智能汇刊》美国•Abstract: A multiscale Canny edge detection is equivalent to finding the local maxima ofa wavelet transform. We study the properties of multiscale edges through the wavelet。
MATLAB语言在控制系统仿真中的应用
长沙电力学院学报(自然科学版)第13卷第2期JOURNAL OF CHANGSHA UNIVERS ITY Vol.13No.2 1998年5月OF ELE CTRIC POW ER(NATU RAL SCIENC E)M ay.1998MATLAB语言在控制系统仿真中的应用*郭 虎 刘永清 吴今培(华南理工大学自动控制工程系 广州 510641) (五邑大学电力工程系 江门 529002)摘 要 分析了M A T L A B语言的功能及其在控制系统仿真中的应用.结合一个由M A T LA B语言编写的反馈控制仿真软件,给出了方便快捷地生成功能较强、交互性好同时界面友好的控制系统仿真软件的思路.关键词 M AT L AB语言 控制系统仿真 反馈控制系统分类号 T P15 随着科学技术的发展,控制理论和系统的研究与应用愈来愈重要,同时控制系统的结构也越来越复杂,而控制系统的计算机仿真的重要性也愈发突出,控制系统仿真在一定程度上也影响着控制技术的发展.在众多的计算机语言中,由美国学者Clev e M ole等人推出的交互式M ATLAB语言受到了控制界研究者的普遍重视.1 M A T LA B语言简述M ATLAB是一个开放性的系统,具有模块化的结构,用户除了可灵活运用其本身带有的函数,还可以根据自己的需要自定义一些函数,它同样可作为M ATLAB的函数进行调用,所以完全采用M ATLAB开发软件同样具有开放性,其内容可方便地修改、增加、维护.M ATLAB语言一开始并不是为控制理论与系统的设计者们编写的,但它一出现就引起了控制界的瞩目,主要是它在处理控制问题时的简便有效.主要表现为:收稿日期 1997-09-29*广东省自然科学基金资助项目连续系统分析Nyquist 图分析Bode 图分析根轨迹分时间响应分析幅频分析相频分析阶跃响应脉冲响应斜坡响应正弦波响应图1 连续系统仿真分析的结构析 在数值线性代数方面,使矩阵运算变得非常简单,如矩阵求逆、求矩阵特征值等较复杂运算,它只需一个指令INV ( )、一个函数EIG ( )等.同时,把求解一些高阶常微分方程也简化成一些函数,如用龙格—库塔法求解微分方程,在这里只需一个函数ODE 23( )或ODE 45( ).在控制系统的数学模型及其转换方面,它也提供了对应函数,如用CANON( )函数可分别求出Jo dan 标准型和伴随标准型,使这方面的工作量减少许多.在控制系统的计算机辅助频域与时域分析方面,它提供SIMU LINK 工具箱,在后面予以介绍.在控制系统计算机辅助设计(频域与时域)方法中提供了诸如求解Riccati 方程的函数LQR ( )等,使繁琐的设计过程变得简单,成为我们辅助设计中的有力工具.在图形界面设计中,M AT LAB 同样也提供了有力的支持.它使用户可设计出具有Win-dow s 风格,对用户优好,形式灵活的界面.2 控制系统的计算机仿真分析在进行自动控制系统分析、综合与设计的过程中,人们除了运用理论知识对系统进行理论上的分析计算以外,常常要对系统的特性进行实验研究;这种研究一般有两种:一种是在实际系统上进行,另一种则是在模型上进行.但是随着控制系统理论与研究的不断发展,许多控制系统变得越来越复杂,使其仿真研究出现许多问题.近年来,由于计算机在控制领域的广泛应用,使得复杂控制系统的仿真实验成为可能,它将实际系统的运动规律用数学形式表达出来,然后用计算机进行描述,这样用同一套仿真设备可以对物理性质截然不同的许多控制系统进行仿真研究,而且进行一次仿真研究的准备主要是系统分析和准备计算程序,这比在实际物理模型中进行仿真,工作量小,周期短,费用低.控制系统仿真是研究数学模型与计算机之间的关系.对一般仿真过程,有以下五个步骤:(1) 写出实际系统的数学模型.(2) 将它转变成在计算机上进行运转的仿真模型.(3) 编出仿真程序.(4) 进行仿真实验.(5) 分析仿真结果,对仿真模型进行修正.对于一般控制系统,对其进行分析研究时,要用到多种分析方法,同时对其控制部分的选择要根据实际系统的要求进行设计.下面以一般连续控制系统的分析为例,来说明控制系统的仿真分析,这些一般都要求在其仿真中体现出来,仿真软件也正是在这种要求下进行编写的(见图1).141 第13卷第2期 郭虎等:M AT LAB 语言在控制系统仿真中的应用 3 M A T LA B 的仿真应用由于M AT LAB 的语句与工具在仿真方面的不同功能,有必要从两方面的应用进行分析.3.1 SIMULINK 工具箱的应用 SIM ULINK 用于仿真动态系统,它是M ATLAB 的扩充,为M AT LAB 提供新的控制系统模型图形输入与仿真工具.它有一个基于窗口的(采用方框图)的图形用户界面.在M AT-LAB 环境下,键入SIMU LINK 命令,就可进入SIM ULINK 的系统模型库.如图2所示.图2 系统模型库图这一模型库包括以下各个子模型库:So ur ces(输入源)、Sinks(输出方式)、Discrete (离散时间模型)、Linkear (线性环节)、Nonlinear (非线性环节)、Co nnections (连接及接口)、Ex tras (其它环节),其中Sources 环节如图3所示.图3 Sour ces 环节模型图若想建立一个控制系统结构框图,则应该选择File/New 菜单项,这样就会自动打开一个空白的模型编辑窗口,允许用户输入自己的模型框图.然后利用图3中所示的图标,根据需要用鼠标拖动方法复制到模型窗口中,连接它们,并设置它们的参数.3.2 MATLAB 在控制系统仿真中的应用在进行软件开发时,系统分析是必不可少的.用M AT LAB 语言进行控制系统仿真,我们采用面向功能的方法对系统进行分析分解.以确定系统的各功能模块.作为现在软件的一种潮流,一个好的软件首先应当有一个优好的人机界面;作为控制软件,还应用高效的控制性能以142 长沙电力学院学报(自然科学版) 1998年5月及较好的帮助信息和人机交互功能,同时其操作应简便易懂.以典型反馈控制系统为例,说明M AT LAB 应用思路.其前提工作是进行系统分析,要熟悉控制系统对象,根据控制对象和系统的具体要求确定适当的控制算法,确定软件的功能与目的,设计出仿真软件功能结构.此例中整个软件结构如图4.图4 软件结构框图下面逐步分析其思路.(1) 建立一个控制仿真软件的主窗口,给用户一个优好的界面,使用户打开软件后即进入此窗口.由于篇幅所限,这里只给出主窗口生成程序.程序名为CTROL.Mglo bal heigh width main info errco l =[l l l ];screen =get (o ,’scr eensize ’);heigh=screen(4);w idth=screen(3);main=fig ur e(’color ’,col,’po s ’,[6.5*heigh .5*w idth .4*heig h],…’contro l system simulition ’,’num bertitle ’,’off ’,’m enubar ’,’no ne ’);new mo del;show menu;show str u ;这里首先要获得显示系统的分辨率,然后打开一个主窗口(句柄为m ain ),这里面可利用get( )函数、fig ur e( )函数、uico ntro l( )、uimenu( )等功能较强的函数,它们在编制仿真软件时非常有效.同时在主程序里调用相关的下一级程序new m odel.m show menu.m show str u .m .(2) 根据系统要求,为了使用户界面及控件都具有操作简便的特点.控件包括编辑框、文本框、背景框、下拉式菜单、弹出式菜单.所有窗口都是通过M AT LAB 的命令产生,编辑和使用都很方便.下面分别分析第二级程序.A 系统初始化程序——new model .m .在对系统进行仿真研究时,我们要对系统模型的不同情况进行不同的赋值,因此有必要在仿真时进行初始化.此程序段打开一个信息窗口(句柄为info),然后对将要用到的各个变量进行初始赋值.B 系统菜单程序——sho wm enu .m .根据系统仿真需要设计菜单项,此处为下拉式菜单.143 第13卷第2期 郭虎等:M AT LAB 语言在控制系统仿真中的应用模型输入新模型输入/修改 传递函数 打开状态空间保存零-极点模型另存为方框图显示模型S IM ULINK 模型有效模型图6 模型输入图系统分析图形伯德图 乃奎斯特图插入乃奎斯特图根轨迹阶跃响应脉冲响应分析的结果 图7 系统分析图 C 系统结构图程序——show stru.m.根据设计在主窗口中给出系统结构图,可使用户对软件目的与应用有直观的了解.其结构图中的每一模块都设计成弹出式菜单,简明实用.整个窗口如图5所示. (3) 第三级程序则根据上一级的功能要求与结构进行设计.一控制系统仿真●模型输入 系统分析 图形 关于…典型反馈系统结构图输入输出○控制系统受控系统延迟环节反馈系统图5 窗口框图 A 系统模型输入.此为系统仿真分析所必需,是必要的一个功能模块.它被上一级的show m enu.m 和sho w stru.m 程序所调用,由结构图可知它同时将影响初始值.其内容如图6‘模型输入’菜单所示.B 系统仿真分析.根据系统分析的要求,此项要给出相应分析工具,如绘制Bode 图、Nyquist 图,给出脉冲响应等.如图7中‘系统分析’菜单所示.C 仿真图形处理,在系统分析中,常常要利用系统的某些特征图形来分析系统性能.它可使用户对图形加以修饰或处理,以满足应用需要,使用户仿真分析更加方便.D 程序有关说明,给出一‘关于……’菜单,给出软件使用及功能说明,使用户快速理解掌握此仿真软件.(4) 第四级程序针对上一级程序的调用关系,给出其支持应用程序,这些程序都是在仿真应用中直接给出其某些功能.A 读取系统数学模型.在这里可以给出多样的控制系统模型读入方法,并可以处理一些复杂系统的模型.当然,这些都是根据实际需要来设计.B 图形显示.在系统分析与图形处理中要调用它.C 改变图形.这一功能也是根据上一级的设计来制定.其要在图形处理时被调用.D 光标处理程序.它被图形处理调用,使用户可在图形上用光标选择曲线点,并在信息窗口中显示有关信息.最后一级是一些公用程序或函数,如显示文本信息,错误显示等.144 长沙电力学院学报(自然科学版) 1998年5月4 结束语M ATLAB 语言简单易懂,对使用者不要求有高深的数学和计算机语言知识,以及对编程技巧的灵活运用,其数值计算功能强大,研究控制系统便利,图形界面丰富,十分适合用于控制系统的仿真研究.在应用过程中,笔者对MAT LAB 的优越性深有体会.鉴于其开放、扩充能力强,随着其版本的升级,它的功能将越来越强,应用将越来越广.参考文献1 张培强.M AT LAB 语言.合肥:中国科学技术大学出版社,1995.21~332 熊光楞.控制系统数字仿真.北京:清华大学出版社,1991.9~263 谢剑英.微型计算机控制技术(修订版).北京:国防工业出版社,1992.35~584 薛定宇.控制系统计算机辅助设计——M AT LAB 语言及应用.北京:清华大学出版社,1996.67~214(责任编辑 陈晓春)The Application of MATLAB in Control System ′s SimulationGuo H u L iu Yongqing(Au tom ation and Control Dept .of S ou th Ch ina Un iv .of T echnolog y Guangzh ou 510641)W u J inp ei(Intelligen t and Information Ins titu te of Wu Yi Univ . J iang men 529000)Abstract In this paper ,the functio n o f MAT LAB lang uage and its application in control sy stem ’s simulatio n are analyzed.With a sam ple of Feedback Co ntrol ’s sim ulation software that uses MAT LAB lang uag e,a w ay of designing the contro l system ’s sim ulation software is given.T his way can be used to design controlling sim ulation software quickly and co nv e-niently ,besides the characteristics of stro ng ly calculating and mapping functio ns ,excellently mutual and friendly interface.Key words M AT LAB lang uag e Contr ol sy stem ’s simulation Feedback contr olling sy s-tem 145 第13卷第2期 郭虎等:M AT LAB 语言在控制系统仿真中的应用 。
基于MATLAB_Simulink机器人鲁棒自适应控制系统仿真研究
第18卷第7期系统仿真学报©V ol. 18 No. 7 2006年7月Journal of System Simulation July, 2006基于MATLAB/Simulink机器人鲁棒自适应控制系统仿真研究高道祥,薛定宇(东北大学教育部暨辽宁省流程工业综合自动化重点实验室,沈阳 110004)摘要:介绍了一种在MATLAB/Simulink环境下进行机器人鲁棒自适应控制系统仿真的方法,利用Matlab软件强大的数值运算功能,将系统模型用Matlab语言编写成M-Function(或S-Function)文件,通过User-Defined-Function模块嵌入到Simulink仿真环境中,可以充分发挥Simulink模块实时的动态仿真功能,简化仿真模型的设计,修改和调整。
基于M-Function建立机器人系统模型的方法可以推广到其他复杂控制系统的建模,SimMechanics在建立多自由度连杆机器人受控对象仿真模型时,简单可靠。
关键词:机器人;Matlab/Simulink;SimMechanics;仿真;鲁棒自适应控制中图分类号:TP391.9 文献标识码:A 文章编号:1004-731X(2006) 07-2022-04Simulation Research of Robust Adaptive Control Systemfor Robotic Manipulators Based on MATLAB/SimulinkGAO Dao-xiang, XUE Ding-yü(Key Laboratory of Process Industry Automation, Ministry of Education, Northeast University, Shenyang 110004, China) Abstract: A simulation method of robust adaptive control was proposed for the robotic manipulator system. The method took the advantage of the powerful computing function of Matlab to programme M-function (or S-Function) for the system model by Matlab language and embedded it to the Simulink by User-Defined-Function module. The real time dynamic simulating function of Simulink would be exerted adequately and the design, modification and adjust of the system model could be greatly simplified. The method of constructing manipulator control system model based on M-Function could be generalized to the other complicated control system and SimMechanics would make the n-links manipulator model conveniently and credibly.Key words: robotic manipulator; Matlab/Simulink; SimMechanics; simulation; robust adaptive control引言一个新的控制算法在付诸使用之前,无论从经济原因还是技术角度,都需要经过仿真阶段来测试控制系统的性能和缺陷。
ESI推出仿真设计新概念
ESI推出仿真设计新概念
佚名
【期刊名称】《航空制造技术》
【年(卷),期】2008(0)1
【摘要】当前CAE市场的需求已经从单一软件工具的需求发展到多物理场、集成的解决方案。
这种变化加速了CAE市场的统一。
其主要变化是:摒弃传统“前处理器一求解器一后处理器”的CAE模式,而采用新的“基于仿真的设计和优化”模式。
【总页数】1页(P93-93)
【关键词】仿真设计;ESI;前处理器;CAE;软件工具;物理场;求解器;市场
【正文语种】中文
【中图分类】TP368.5
【相关文献】
1.英美推出绿色飞机新概念设计 [J],
2.安捷伦科技推出每分钟可进行百万比特量级仿真的通道仿真器用于信号完整应用——新的先进设计系统仿真器可加快多千兆位/秒芯片间数据链路设计的眼图测量速度 [J], 无
3.万达酒店及度假村推出超中端设计酒店新概念 [J], ;
4.法国ESI推出PAM-CAST 2002铸造仿真模凝软件 [J],
5.仿真设计——包装设计教学新概念 [J], 曹武亦
因版权原因,仅展示原文概要,查看原文内容请购买。
001 (ISSCC tutorial)Noise Analysis in Switched-Capacitor Circuits
© 2011 IEEE
IEEE International Solid-State Circuits Conference
© 2011 IEEE
Thermal Noise Power
• Nyquist showed that
PSD ( f ) = 4kT
• The total average noise power of a resistor in a certain frequency band is therefore
– Examples: Audio systems, wireless transceivers, sensor interfaces
• Electronic noise directly trades with power dissipation and speed • Electronic noise is a major concern in modern technologies with reduced VDD
• The noise of a MOSFET operating in the triode region is approximately equal to that of a resistor • In the saturation region, the thermal noise can be modeled using a drain current source with power spectral density
• We can model the noise using an equivalent voltage or current generator
2 vn
= Pn ⋅ R = 4kT ⋅ R ⋅ Δf
一篇没有图和公式的工程类综述文章
/Structures Journal of Intelligent Material Systems and/content/23/11/1181The online version of this article can be found at:DOI: 10.1177/1045389X124450292012 23: 1181 originally published online 6 May 2012Journal of Intelligent Material Systems and Structures Fabio Casciati, José Rodellar and Umut Yildirimtheory and applications: A review of recent advances−Active and semi-active control of structuresPublished by: can be found at:Journal of Intelligent Material Systems and Structures Additional services and information for/cgi/alerts Email Alerts:/subscriptions Subscriptions: /journalsReprints.nav Reprints:/journalsPermissions.nav Permissions:/content/23/11/1181.refs.html Citations:What is This?- May 6, 2012OnlineFirst Version of Record- Jun 29, 2012Version of Record >> by Xian-Xu Bai on October 27, 2013 Downloaded fromReview articleJournal of Intelligent Material Systems and Structures 23(11)1181–1195ÓThe Author(s)2012Reprints and permissions:/journalsPermissions.nav DOI:10.1177/1045389X12445029Active and semi-active control of structures –theory and applications:A review of recent advancesFabio Casciati 1,Jose´Rodellar 2and Umut Yildirim 1AbstractIt is internationally recognized that structural control was introduced in civil engineering through a pioneering article by Yao and through the implementations promoted by Kobori.The concepts of active and semi-active structural control in civil and infrastructure engineering date back 40years and much progress has been recorded during these four decades.Periodically,state-of-the-art manuscripts have been published and technical books were also printed to testify the maturation of the topic.This article only covers the period from the second semester of 2009to the first semester of 2011,emphasizing the developments in terms of theoretical,numerical and experimental studies,as well as the use of control algorithms and devices in actual implementations.It is observed that there are still several operational limitations to prevent from the expected growth of the applications in standard design.Nevertheless,some innovative concepts help to foresee future developments within special sectors of applications.Keywordsactive control,control algorithms,intelligent systems,laboratory testing,semi-active control,structural controlIntroductionThe solutions for mitigating the response of structures under natural hazards,such as earthquakes and strong winds,have been moving from passive control systems to smart and effective active or semi-active systems by exploring recent advances in microprocessor,sensor and actuator technologies.While passive systems are unable to adapt to changes in the structural properties and to the stochastic nature of the external excitations,active control systems can adapt to a wide range of operating conditions and structures.But their input of mechanical energy into the structural system could result in significant increases in hardware costs and reliability issues.Semi-active control systems achieve a compromise between active and passive control systems by combining the inherent reliability of passive systems and the adaptability of active systems without requiring significant sources of external power.In addition they are inherently stable.Over the past four decades,various control algo-rithms and control devices have been developed,modi-fied and investigated by various groups of researchers since the pioneering work by Yao (1972).Periodic con-ferences greatly helped to disseminate the scientific and technical developments (Baratta and Rodellar,1996;Belyaev and Indeitsev,2008;Casciati,2003;Casciatiand Magonette,2001;Flesh et al.,2005;Fujino et al.,2010;Housner et al.,1994;Johnson and Smyth,2007;Kobori et al.,1999).While many of these structural control strategies have been successfully applied,challenges pertaining to cost,reliance on external power and mechanical intri-cacy during the life of the structure have delayed their widespread use.An early review article of active struc-tural control in civil engineering was prepared by Soong (1988).The article stated the motivating factors of active control and the benefits of its use under severe conditions.The activities in control system design,algorithm development and some practical considera-tions were also outlined.The conceptual basic system architecture of actively controlled structures was first proposed by Kobori early in the 1950s.He classified the researches on active control in theoretical research and application1Department of Structural Mechanics,University of Pavia,Pavia,Italy2Department of Applied Mathematics III,Universitat Polite`cnica de Catalunya (UPC),Barcelona,SpainCorresponding author:Umut Yildirim,Department of Structural Mechanics,University of Pavia,Via Ferrata 1,27100Pavia,Italy.Email:umut.yildirim@unipv.itdevelopment(Kobori,1996).Several authors worked together(Housner et al.,1997)to publish a tutorial(or survey)article to provide a starting point for research-ers who were wishing to assess the state of the art in the control of civil engineering structures.The article provided a link between structural control and other fields of control theory,pointing out both differences and similarities.The article provided details of passive energy dissipation systems,active control systems, hybrid and semi-active control systems,sensors for structural control,smart material systems as well as structural health monitoring and damage detection as support to structural control.A detailed literature review of semi-active control systems was prepared in Symans and Constantinou (1999).The review specifically focussed on the descrip-tion of the dynamic behaviour and the distinguishing features of various semi-active systems,which had been experimentally tested both at the component level and within the small-scale structural models.The semi-active systems that were reviewed include stiffness control devices,electrorheological dampers,magnetor-heological(MR)dampers,friction control devices,fluid viscous dampers,tuned mass dampers(TMDs)and tuned liquid dampers.The article by Soong and Spencer(2002)presented a brief historical outline of the development and an assessment of the state of the art and state of the prac-tice of evolving structural control technology.Also, their advantages and limitations were included in the context of seismic design and retrofit of civil engineer-ing structures.A review study for the main classes of semi-active control devices and their full-scale imple-mentation to civil infrastructure applications was pre-sented1year later(Spencer and Nagarajaiah,2003).Another review(Datta,2003),mainly focussed on the application of active control of structures to coun-teract earthquake excitation,provides theoretical back-grounds of different active control schemes,parametric observations on active structural control,limitations and difficulties of their practical implementation.An overview on some theoretical and practical issues involved in the design and implementation of control algorithms was presented in Rodellar et al.(2008), including selected references.More recently,the article by Soong and Cimellaro (2009)focussed on the integrated design of control/ structural systems.The research opened a gate for new possibilities in structural forms and configurations.The main idea was to separate the control law into two parts: a passive part that was implemented into the physical system by redesigning it and an active part that repre-sents the remaining active control law required after the structure redesign.In other words,the structure can be redesigned for better controllability in terms of a lighter structure for a specified performance in view of minimiz-ing the amount of active control power needed.The developments and advances in semi-active/smart variable stiffness and adaptive passive systems were pre-sented in Naragarajaiah(2010).Semi-active or smart tuned mass dampers(STMDs),adaptive length pendu-lum(ALP)dampers,adaptive negative stiffness devices (NSD)and also their driving algorithms were proposed.In parallel to the evolution of review papers published in international journals,some books were also prepared (Casciati et al.,2006;Chu et al.,2005;Rodellar et al., 1999),initially in the form of contributed chapters orga-nized by editors.Recent contributions of the new con-cepts and applications in structural control strategy are disseminated by Rodellar et al.(1999).From mathemati-cal calculations to practical issues at the infrastructure level,several topics are introduced to the readers’atten-tion.In particular,the book chapters ranged from topics of observability,controllability,model-free approaches, risk adverse control,semi-active control,spillover,decen-tralized control,H N tools,stability-based control,fuzzy controllers,adaptive structures and so on.Significant issues involved in the integrated implementation of active control systems are introduced in Chu et al.(2005).Basic knowledge of how to handle digital data discretized from analogical measurements,transformation from theoreti-cal values to practical signals and the effects of quantiza-tion are introduced.Then,the compatibility between the control hardware and the software of the integrated sys-tem is evaluated.Additionally,the issues of discretization in time,output feedback,sensor inaccuracies,time delays,measurement noises and real-time measured sig-nals are considered.The book by Casciati et al.(2006)is organized into two parts:theoretical contributions and experimental evaluations.The first part consists of different kinds of control schemes and strategies.The second part explains the concepts in terms of implemen-tation aspects.This article only covers the developments in the period from the beginning of2009to the early2011.Its general outline moves from a review of the progresses on a theoretical and numerical ground(section ‘Theoretical issues and numerical simulations’).Section ‘Experimental studies’groups few examples of experi-mental and hybrid testing studies.Section‘Full-scale applications’discusses the full-scale applications together with a foreseeing of the expected develop-ments in structural control.Section‘Final remarks and conclusions’outlines some concluding remarks. Theoretical issues and numerical simulationsControl theory is the base for developing active and semi-active strategies.Many issues are involved in designing control laws:model,feedback architecture (centralized/decentralized),performance objective,con-trol methodology,stability,robustness in the presence1182Journal of Intelligent Material Systems and Structures23(11)of uncertainties and non-linearities.All of them are crucial and have to be investigated in the design pro-cess.Since most of these characteristics are combined in different ways depending on each control problem, there is not a single way of organizing a review on con-trol methods in an area like structural control.This sec-tion is divided into subsections where the compiled contributions have significant intersections.Subsection ‘Control laws and feedback architecture’joins articles where modelling issues and feedback architecture are particularly relevant.Subsection‘Soft computing and adaptive control laws’includes mainly soft computing and adaptive approaches.Typical non-linearities arise when using‘smart’actuators in semi-active settings, like in the family of MR dampers.This family has attracted intensive research in the last few years and is the subject of subsection‘Control laws for the MR device family’.Control designs have been sometimes directly motivated by case studies.Results are often based on reduced numerical models without experi-mental support.They offer the scientists and the designers a common framework for comparing the achieved ability to manage well-defined problems. Among the case studies,a special character must be given to the contributions to the benchmarks launched across the scientific community.Subsections‘Case studies’and‘Benchmark studies’discuss a number of articles within this framework.Control laws and feedback architectureThis subsection reviews a set of articles whose main focus is on several issues that have an architectural nature within a control loop.Thus,some articles deal with the kind of performance that a system(the struc-ture)is expected to achieve through a control system. Concepts such as desired response and pole assignment are used to design controllers based on performance specifications.The problem of the time delay in the control loop(mainly due to the actuation time lags), which was a subject of big concern for long time in the structural control research community,is still in the focus of some of the reviewed articles.A significant component in a control loop is the architecture linking the sensors and the actuators. Different options can be adopted depending on the number and location of these devices and how the information signals are connected,particularly for sys-tems with large physical dimensions.This may be par-ticularly relevant for large-scale structures like bridges, buildings and others.Some articles in this subsection deal with decentralized strategies where the overall sys-tem is first decomposed into subsystems and local con-trollers are designed and implemented.The final purpose is to reduce the transmission and computation costs within the control loops while increasing the relia-bility of the control system in case of failures in sensors.A procedure using a two-stage approach was formu-lated in Cimellaro et al.(2009a)for the integrated design of controlled structural systems.As a first step, an initial structure was chosen and was assumed fixed, while the controller was designed in order to satisfy a given performance requirement(e.g.drift,absolute acceleration,base shear,etc.)of this initial structure. The dynamic response of the initial structure in this step is called‘Ideal Response’.As a second step,the struc-ture and the controller were redesigned cooperatively to achieve a common goal(the ideal dynamic response of the first step),while a certain objective function was optimized.For example,structural redesign can be accomplished to reduce the amount of active control power needed to achieve the‘ideal response’.In other words,the structure was redesigned in view of a better controllability.Basically,the integrated redesign proce-dure was formulated for the case of elastic buildings. The same authors also proposed the integrated design of structural/control systems in the case of inelastic structures(Cimellaro et al.,2009b).The eigenvalues of a linear vibratory system under state-feedback control in the presence of time delay are studied using the method of receptances(Ram et al., 2009).The eigenvalues are separated into two groups, primary and secondary eigenvalues.The primary eigen-values are the finite eigenvalues of the system without time delay.The secondary eigenvalues are the other eigenvalues emerging from infinity due to the delay. The analysis is based on Taylor series expansion of the control that allows approximation of the primary eigenvalues of the system.This approximation can be improved to desired accuracy by increasing the order of the expansion as shown by examples.The theoretical and practical applications of receptance method for single-input and multi-input state-feedback partial pole placement were developed and demonstrated useful for vibration suppression in structures(Tehrani et al., 2010).One of the advantages of the receptance method, over conventional matrix methods such as state-space control based on a finite element discretization,is that there is no need to know or to evaluate the structural matrices,or of the actuator dynamics,which may be included in the measurement by generalization of the receptance.Poles are assigned sequentially,the force distribution vector in each step being selected from the null space of previously assigned modes to easily excite the next mode,thereby ensuring that the previously assigned poles are uncontrollable and remain unchanged.A good agreement was demonstrated between the simulated and measured poles and also in the natural frequencies and damping of the structures. The problem of noise in measured receptances of robust pole placement in structural vibration is studied in Tehrani et al.(2011).The effects of sequential multi-input state feedback combined with minimization of the eigenvalue sensitivity are investigated.In aCasciati et al.1183sequential multi-input state-feedback approach,the procedure assumes that a different eigenvalue can be assigned at each step without changing those eigenva-lues assigned at previous steps.The sequential approach has the advantage of a characteristic equa-tion that is linear in the control gains and is shown to be inherently more robust to measurement noise than the single-input method.A dynamic control strategy,based on pole placement technique,was proposed for application to active or semi-active control systems installed in buildings designed against seismic actions(Pnevmatikos and Gantes,2010).The general control strategy consists of the following stages:the monitoring of the incoming signal,its fast Fourier transform(FFT)or wavelet anal-ysis for recognition of its dynamic characteristics,the selection of poles of the integrated controlled system, the application of the pole placement algorithm for the calculation of the required actions,and finally,account-ing for the limitations of the devices to be used,their action accounting for saturation effects and time delay.The article by Abdel-Rohman et al.(2010)addressed the problem of time delay compensation by two meth-ods.In the first method,the delayed control action was expressed in terms of the current control action and its derivatives using a truncated Taylor’s series.In the sec-ond method,the delayed control action was expressed as feedback of the delayed state variables.Both meth-ods were applied on a linear model derived from the actual non-linear model.A technique to verify the stability and accuracy of adaptive control algorithms affected by time delay is proposed in Bursi et al.(2010).The adaptive minimal control synthesis(MCS)algorithm is applied to linear time-invariant plants while the whole controlled system state and control equations,discretized by the zero-order-hold(ZOH)sampling,are non-linear.The two linearization procedures are obtained by a physical insight scheme and Taylor series expansion.The effec-tiveness of the methodology is assessed by both simula-tions and experimental tests.A time-delayed decentralized H N controller was designed and validated using a numerical model of a five-storey structure in Wang(2011).Simulations were conducted to illustrate the effects of different feedback time delays for different decentralized feedback pat-terns.The performance of the decentralized H N con-trollers was then compared with the performance of time-delayed decentralized controllers that were based on linear quadratic regulator(LQR)optimization cri-teria.It was shown that with less feedback latency, decentralized control strategies may achieve similar performance when compared with centralized ones. Therefore,decentralized strategies can be more appeal-ing due to associated lower costs.An algorithm of modified predictive control(MPC), which was derived with the partial-state concept of direct output feedback(DOF)to reduce the number of sensors for real implementation,was given in Yang et al.(2011).According to the algorithm,the online con-trol forces were simply generated from the actual out-put measurements that were multiplied by a prescribed constant output feedback gain matrix.Decentralized strategies using the concept of over-lapping systems have been proposed in control theory and recently focussed on structural control in Bakule et al.(2005)and Palacios-Quin onero et al.(2010). Overlapping means to decompose a large-scale system into subsystems that share state and control variables. Using appropriate linear transformations,the overall system can be represented as a set of decoupled subsys-tems in such a way that‘virtual’decentralized control-lers can be designed for such subsystems.Then,these controllers are transformed back so that they can be implemented in the real system.The methodology ensures essential structural properties like controllabil-ity and observability(Bakule et al.,2001).In the article by Zimmerman and Lynch(2010),an agent-based data processing in the wireless structural health monitoring through the application of market-based techniques was used in network mode shape esti-mation.Specifically,following previous wireless sensor work by the authors,in both decentralized frequency domain decomposition(DCFDD)and market-based resource allocation,an algorithm derived from free-market principles was developed through which an agent-based wireless sensor network can autonomously and optimally shift emphasis between improving the accuracy of its mode shape calculations and reducing its dependency on any of the physical limitations of the wireless network,namely,processing time,storage capacity,wireless bandwidth or power consumption.In summary,most of the articles discussed above deal with eigenvalues,poles,time delay,performance, model decomposition and decentralization.All of them are essential issues in designing and implementing con-trollers for systems that have a complex architecture,as for the systems encountered in structural control.Some of the above issues are‘classical’in the structural con-trol literature.Others,like those related to feedback architecture and decentralization,are more recent in this context and,in our opinion,have potential to grow in the near future,particularly when associated to the new possibilities of wireless sensing and computing. Soft computing and adaptive control laws Structures are complex systems that include elements and devices with a clear non-linear nature.This issue motivated an increasing interest in the recent years for developing non-linear control methods.In this context, the interaction between modelling and control formula-tion is very important and the mathematical and computational involvement is a significant problem to1184Journal of Intelligent Material Systems and Structures23(11)tackle.Analytical models are,in principle,the ideal framework to describe accurately the dynamic beha-viour and to develop appropriate mathematical control laws to ensure stability and performance requirements with robustness capability against discrepancies between the models and the real non-linear behaviour. Since accurate models are not always available and are difficult to validate experimentally,there is a trend to use simplified models based on semi-physical approxi-mations or direct input–output relationships experi-mentally obtained for control purposes.The articles included in this subsection use tools such as wavelets,neural networks,fuzzy logics and soft com-puting.They have in common the objective of control-ling systems by combining analytically based control methods with model-free tools for uncertain non-linear and time-varying components.A wavelet-based adaptive time-varying controller was investigated by Basu and Nagarajaiah(2008).The modified LQR algorithm of the controller uses the information derived from the wavelet analysis of the response in real time,in order to obtain the local energy distribution over frequency bands.This struc-tural system information is used to adaptively design the controller by updating the weighting matrices to be contributed to the response energy and the control effort.The optimal LQR control problem is solved for each time interval with updated weighting matrices, through the Riccati equation,leading to time-varying gain matrices in real time.A wavelet neuro-controller capable of self-adaptation and self-organization was also proposed in Laflamme et al.(2011)for uncertain systems controlled by semi-active devices,regarded as ideal candidates for large-scale civil structures.The controller was built on neural networks.The adaptive rules of the neuro-controller were derived using Lyapunov stability to ensure robustness.The performance of an adaptive fuzzy sliding mode control(AFSMC)for highway bridges was investigated in Ning et al.(2009).This approach combines the advantages of sliding mode control(SMC),adaptive control and fuzzy control without compromising the stability or robustness.Switching-type control law of the conventional SMC and uncertainty part of the equivalent control was approximated by a fuzzy con-troller to attenuate the chattering phenomenon of SMC and harmful effects caused by uncertainties.In order to reduce the complexity of the fuzzy rule bases,an adap-tive law based on Lyapunov function and Barbalat’s lemma was designed.AFSMC is also integrated with a clipped-optimal(CO)strategy to illustrate its efficiency for semi-active MR dampers.A non-linear robust control approach to address the non-linear control problem of civil structures under strong earthquake excitation was presented in Li et al. (2011).The overall system was decomposed into several subsystems,each adopting a corresponding control algorithm.During the control design process,a direct adaptive fuzzy control design scheme was developed to deal with the non-linear subsystem.The stability of the closed-loop system was proven by Lyapunov’s direct methods.Moreover,H N performance was achieved through a subsystem with the proposed controller.An adaptive control method was proposed in Bitaraf et al.(2010)with the focus on damage mitigation.The purpose was to force the damaged structure to behave like the undamaged structure that has an acceptable performance.The observability of the system shows that the internal states of the system can be inferred by the knowledge of its external outputs.The controllabil-ity and observability of the system with the governing equations were checked.An inverse Lyapunov method in a bang-bang type semi-active control for civil structures was used in Hiramoto et al.(2010).In the conventional Lyapunov-based semi-active control,the Lyapunov function is first determined;mostly,it is defined as the sum of the kinetic and potential energies at every instant,and the bang-bang type control is derived so that the dissipation rate of the defined Lyapunov function(the total energy) is maximized.In this specific article,conversely,the bang-bang type control is first introduced,based on an unspecified Lyapunov function.Then,the Lyapunov function was searched over a defined parameter space so that the performance index on vibration control was optimized.The Lyapunov function was parameterized as the weighted sum of the following indices:the sum of the kinetic and the potential energies,the sum of the squared inter-storey drift,the squared modal displace-ment and velocity of lower modes of vibration.Under the proposed parameterization,the parameters in the Lyapunov function were optimized with genetic algo-rithms to minimize the quantitative performance indices on vibration suppression.The combination of complementary techniques is,in general,an interesting way of addressing complex prob-lems.The above articles combine analytical methods, like Lyapunov stability,SMC and H N,with‘soft’tools trying to exploit benefits from both sides.While the analytical methods provide a solid mathematical back-ground for a class of models within given assumptions and working conditions,model-free tools can help in supplying practical rules for time-varying environments that may be difficult to model.The reviewed articles are some examples in structural control.Control laws for the MR device familyThis subsection deals with a class of actuators that con-tain MR fluids.After application of a magnetic field, the fluid changes from liquid to semi-solid state in few milliseconds.Thus,although they are really dampers that supply dissipative(not active)forces only,they canCasciati et al.1185。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AWESIM: THE INTEGRATED SIMULATION SYSTEMA. AlanB. PritskerJean J. O’ReillyPritsker CorporationP.O. Box 2413Lafayette, Indiana 47906, U.S.A.ABSTRACTAweSim® is a totally new general-purpose simulationsystem. AweSim takes advantage of the latest inWindows® technology to integrate programs andprovide componentware. AweSim includes the VisualSLAM® simulation language to build network,subnetwork, discrete event, and continuous models.Network models require no programming yet allowuser-coded inserts in Visual Basic or C. Discreteevent and continuous models can be created using theobject-oriented technology of Visual Basic, C orVisual C++ and can be combined with networkmodels. This paper will demonstrate the process ofusing AweSim’s componentware, describe examples ofuser interfaces that allow integration with otherapplications, and present examples of models used forproblem solving using AweSim.1INTRODUCTIONAweSim is a program that supports the range of tasks required to perform a simulation project. AweSim also provides integrating capabilities to store, retrieve, browse and communicate with externally written software applications. The architecture of AweSim is shown in Figure 1. The most fundamental feature of the AweSim architecture is its openness and interconnectivity to databases, spreadsheets and word processing programs such as Microsoft Office. AweSim is built in Visual Basic and C/C++ and programs written in these languages are easily incorporated into its architecture. The details on the capabilities of AweSim are contained in the AweSim User’s Guide (Pritsker Corporation, 1997).An AweSim project consists of one or more scenarios, each of which represents a particular system alternative. A scenario contains component parts. Software programs called builders are provided by AweSim to create each component.Figure 1:The AweSim Architecture AweSim’s Project Maintainer determines if a model translation or compilation is required. Each time the modeler requests a run, the Project Maintainer examines changes made to the current scenario to determine if any components have been modified and indicates whether translating tasks should be performed. The Project Maintainer then allows the user to specify whether these tasks should be done prior to performing the requested function. Multiple tasks may be performed in parallel while a simulation is executed in the background. The simulation modeler can switch between tasks by using a mouse to click in the appropriate window.The use of the MS Windows interface simplifies learning and provides the foundation for combining application programs using that interface.ConcurrentAnimationAnimationReplayInput OutputDatabaseOutput(.dbf)TextOutputOutputLegendSpreadsheetOutput(.xis)AweSimComponent BuildersProject MaintainerProceedings of the 1997 Winter Simulation Conferenceed. S. Andradóttir, K. J. Healy, D. H. Withers, and B. L. Nelson5452 MODEL OUTPUTAweSim provides the ability to compare output from various scenarios both graphically and textually. A report “browser” allows alternative textual outputs to be compared side by side. Graphically, output maybe viewed within AweSim in the form of bar charts,histograms, pie charts, and plots. Bar charts can be used to display the value of a statistic across scenarios.It is possible to view multiple windows of graphical output at the same time, as shown in Figure 2.Graphical and textual information from the AweSim database can be exported to other Windows packages such as EXCEL or Word for additional analysis andfor documentation.Figure 2: Multiple Report Windows 3 ANIMATIONWith the AweSim animator, one may develop and display multiple animations for a single scenario(Figure 3).Figure 3: Animation with Multiple WindowsFor example, the modeler can create one animation of a system at an aggregate level and another at a department level, side by side in separate windows.The two views may then be displayed by associating the animations with the current scenario and running the simulation. Animation constructs, called actions,correspond to elements in an AweSim network model.For example, the ACTIVITY action shows movement of a symbol. It requires that the modeler define a symbol, a graphical path location where movement of the symbol will be shown, and the number of an activity in the AweSim model to which to tie the movement. Other actions are provided to display resource status, items in a queue, variable values, and other system status conditions. The symbols manipulated by the animator are of two types:graphical items one wants to display or move, and the background on which they will appear. These symbols are stored in standard Windows bitmap format,allowing them to be exchanged between programs using the Windows clipboard.4 INTERACTIVE EXECUTIONThe AweSim Interactive Execution Environment (IEE)provides an interface with an executing simulation.The modeler may examine, modify, save, or load the current system status using the IEE. The IEE supports the debugging of a model under construction and verification of a completed model. The analyst may use the IEE to develop and analyze alternative control strategies for a system or to demonstrate the operation of the model to non-modelers. The IEE control panel (Figure 4) lets you advance through the model step-by-step or by setting breakpoints. At any point you may examine variable values, statistics, or queue entries or save the system status in order to reload andexperiment with alternative scenarios.Figure 4: Interactive Execution Environment546 Pritsker and O’Reilly5 MODELING AGENTS AT AN AIRPORTCOUNTERAt an airport counter, there are two lines for passengers waiting to check in or to purchase tickets. One of the two lines is for first class passengers and passengers who receive priority treatment due to the number of miles they fly with the airline. The second line is for coach passengers. The airline maintains 6 agents to process passengers during a peak period. Two agents process priority passengers but will serve coach passengers if no priority passengers are waiting. Two of the agents select their passengers from either of the two lines with a preference for passengers waiting in the priority line if both dedicated agents are busy. If no one is waiting in the priority line, then these agents select the next passenger waiting from the coach line. The last 2 agents are dedicated to coach passengers. If more than 1 of the coach agents are idle, the agents have an informal rule that the agent that has been idle the longest serves the next incoming passenger. Passengers in the priority line are served by the closest available agent that serves priority passengers.Priority passengers arrive during the peak period according to an exponential distribution with a mean time between arrivals of 5 minutes. Coach passengers also arrive with an exponential distribution but with a mean time between arrivals of 2 minutes. For priority passengers, the service time is uniformly distributed between 2 and 20 minutes as they require different types of service. Coach passengers have a processing time that is triangularly distributed with a modal value of 6 minutes, a low value of 3 minutes and a high value of 12 minutes. It is desired to estimate the amount of time each type of passenger waits in the system and to assess the utilization of the 6 agents, both individually and as part of the first class and coach groups. A schematic of the system is shown inFigure 5.Figure 5: Schematic Diagram of Airport Counter.The Visual SLAM network model consists of two disjoint network segments involving the arrival of passengers, the waiting for an agent, the processing by the agent, the freeing of the agent and the collection of time-in-the-system statistics. These functions are modeled by a CREATE node, AWAIT node, ACTIVITY, a FREE node, a COLCT node and a TERMINATE node. Consider first the resource definitions and the resource GROUP definitions whichgraphically are shown in blocks (Figure 6).Figure 6: Resource and Group BlocksA RESOURCE block defines each resource individually by number and name and resource capacity. Then the file numbers where entities wait for the resources are listed in a preferred order for allocation. The GROUP block defines a group number and name, the order in which individual resources are allocated from the group and the rule by which they are allocated. For example, for the GROUP FCAGNTS, agent F6 is allocated before agent F5 if both are idle. At an AWAIT node, multiple GROUPS can be listed so that combinations of sets of resources can be allocated to entities.In Figure 7, the flow of entities is shown. The arrival time is assigned at the CREATE nodes and placed in ATRIB[0] for each arriving passenger entity. The entity is then routed to an AWAIT node where it waits, if necessary, in File 1 for priority service or File 2 for coach service. For priority service, a selection is made of one of the resources in GROUP FCAGNTS and the coach agents C4 and C3. The coach passenger entities wait in File 2 for one of the resources in GROUP COACHAGNTS or for an idle FCAGNTS. The agent or resource number allocated to a passenger is stored in LTRIB[0] as indicated at the AWAIT nodes. Activities 1 and 2 model the agent processing time. For priority passengers the processing time is uniformly distributed between 2 and 20. For coach passengers the processing time is triangularlydistributed with parameters 3, 6 and 12.AweSim: The Integrated Simulation System 547Figure 7: Network Model for Airport Agent Model.After being processed, the passenger entity arrives at a FREE node where the resource allocated at the AWAIT node is freed. Next, the time in the system, TNOW-ATRIB[0], is collected at COLCT nodes which are numbered as 1 and 2. The entities are then terminated as they have received service from an agent.6 MODELS WITH A SUBNETWORKThe Visual SLAM subnetwork (VSN) shown in Figure 8 is used to demonstrate the basic capabilities and concepts related to subnetworks. The VSN block provides a name, COMPRES, a computer resource for the subnetwork. COMPRES is used to make a computer resource available at different locations in a calling network or subnetwork. The parameters of COMPRES are COMPCAP, a computer resource capacity, and PROCTIME, a processing time for the computer activity.Figure 8: Subnetwork for Computer Processing The RESOURCE block in the VSN specifies the label for resource 1 as COMP which has a capacity as defined by Parameter 1, that is, COMPCAP. The value of COMPCAP on the RESOURCE block for the instance CPU is set on the first call to VSN COMPRES through the process of instantiation. The first node of the VSN is an ENTERVSN node which is the start of the path of the entity in the subnetwork. Next the entity waits at an AWAIT node in file 1 for one unit of the resource COMP. When the entity is allocated the resource, it proceeds to activity 1 where Parameter 2, PROCTIME, provides a value for the processing time. Following the processing time activity, resource COMP is freed at a FREE node and the entity is returned from the VSN by the RETURNVSN node.The VSN is called from the main network or a subnetwork when an entity arrives to a CALLVSN node. An example of a calling network with two calls to the VSN COMPRES from nodes CALL1 andCALL2 is shown in Figure 9.Figure 9: The Main Network. 548 Pritsker and O’ReillyAt both CALLVSN nodes, the resource is identified as CPU which provides an instance of the VSN whose name is COMPRES. At node CALL1, the processing time is specified as EXPON(10.,1) and at node CALL2 the processing time is specified as 6. In this illustration, the entities arriving to the CALLVSN nodes both wait in file 1 for resource COMP with instance CPU in accordance with the priority rule for file 1. The processing time is taken as parameter 2 of the VSN. The resource capacity, COMPCAP, is taken from parameter 1. Since no special exit numbers are prescribed, the entity is returned to the CALLVSN node from which it came and normal branching from the CALLVSN node occurs.A second calling network that uses the VSN COMPRES is shown in Figure 9 involving two resources, CPU1 and CPU2. The CALLVSN nodes CALL3 and CALL4 specify the instance of the subnetwork as CPU1 and CPU2, respectively. Each different instance of the subnetwork is a separate object with its own capacities, files, etc.Figure 10: A Second Main Network.In Figure 10, parameter 1 at both CALLVSN nodes indicates a capacity of 1. Parameter 2 specifies the processing times. Entities wait in file 1 but in a different instance of file 1. Statistics for file 1 would be collected separately for entities waiting for CPU1 from those waiting for CPU2.If CPU2 has a capacity of 2 then parameter 1 at node CALL4 would be changed to a 2. Since there are two instances of the VSN COMPRES, the resource capacity COMPCAP is set on the first call of VSN COMPRES for each instance.7 LIVER TRANSPLANTATION POLICYEVALUATIONOrgans for transplantation are a scarce life-saving resource. The number of cadaveric donors has not kept pace with increasing demand. The United Network for Organ Sharing (UNOS) operates a nationwide system to procure and allocate human organs to potential recipients. Pritsker Corporation in conjunction with UNOS developed the UNOS Liver Allocation Model, ULAM, for assessing proposed policies for allocating livers (Pritsker et al., 1995, 1996). The material presented here referred to as ULAMjr is based on ULAM with major changes made to reduce the size and scope of the model.ULAMjr illustrates the use of the AweSim integration capabilities to: provide input data for a model; store model outputs for presentation using Excel; and build animations illustrating the allocation of organs to waiting patients. Outputs are stored in an AweSim database to facilitate the computation and display of performance measures. A MATCH node is used to determine the patient to which an arriving liver is to be allocated. A ranking of entities in a queue based on primary and secondary priority variables is demonstrated with the first priority being status and the secondary ranking based on waiting time.The ULAMjr model is shown in Figure 11. Only the novel features will be described in this paper (see Reference 1 for more details).The arrival time of the liver entity is established as ATRIB[0] and the time between arrivals of liver organs is specified at the CREATE node. READ node READ0 is used to read a file which contains attributes for liver entities. The liver entity is then routed to QUEUE node Q2 where it is matched with a waiting patient. The coordinates of the donor hospital are read in as ATRIB[4] and ATRIB[5] and these are used to collect statistics on the donated liver travel distance and in an animation that shows the transfer of livers to patients throughout the United States.The arrival of patients is separated into arrivals by status type. Prior to running the Visual SLAM program, files were constructed with the attributes necessary to describe the type of patient arriving for a given status. The random sampling from these files to represent a set of characteristics for patient entities is referred to as “bootstrapping.”The patient entity is sent to an ASSIGN node where the patient’s current status is set. The value of the next status for the patient, and the time at which the status change will occur, are set in a user function.For each status code, patient entities are routed to QUEUE node Q1 where they are inserted into the file 1 waiting list in accordance with the file's priority ranking rule. A MATCH node MAT is used to match an arriving liver entity with a waiting patient with the same blood type who has the highest value of the ranking expression. The matched entities are routed from the MATCH node to an ACCUMULATE node where the attributes of the two entities are combined. The transplanted patient entity is then routed to COLCT node DISP where the distance between the donor hospital and the patient transplant center iscollected and the patient entity is routed according to AweSim: The Integrated Simulation System 549the status code at which the patient was transplanted.Three COLCT nodes are used to obtain the waiting time until transplant by status type. Following each COLCT node is an activity which has a condition that represents the 2-year survivability of the transplanted patient.A disjoint network is used to model the statuschange process. To accomplish this reviewing of patients, a CREATE node creates one entity at 4 a.m.of the first simulated day and routes it to FINDAR node SEARCH. The FINDAR node initiates a search through file 1 and a testing of the value of LTRIB[2]to determine whether it is less than or equal to TNOW.Figure 11: Visual SLAM Network Model for Transplantation Analysis.If the value is less than or equal to TNOW, the patient entity that is making a status change is removed from file 1 and routed to GOON node CHST where it is further routed to ASSIGN nodes, STAT2 or STAT3,based on its changed status code, LTRIB[2]. At nodes STAT2 and STAT3, the current status of the patient is reset and the next transition state and time are established. If the patient is making a transition to Status 4, the death state, then statistics are collected onthe number and waiting time of a pre-transplant death categorized by status at death. The pre-transplant death waiting times are collected at a single COLCT node by making the COLCT node number an expression,7+LTRIB[0], and concatenating a string with LTRIB[0] as the output identifier. This entity is then terminated from the simulation.Function INTLC is used to provide an initial list of200 patients in file 1. Fifteen hundred hours was550 Pritsker and O’Reillyselected as the start time of the simulation because the earliest arrival time of the 200 patients was within this 1500 hour time interval.The policy being simulated involves a single national list in which patients are allocated a liver based on their medical status first and patients of the same status selected based on longest waiting time. The allocation requires identical blood matching between the organ donor and the patient. Livers were available to transplant approximately 66% of the arriving and initial patients. Of the patients transplanted, 3,156 survived for greater than two years to give a transplantation survival fraction of 0.778. There were 900 patients who died after transplantation and 699 patients who died while waiting for a transplant. This constitutes 26% of the patients.Although the data in this example is hypothetical, it does present the dilemma involved in allocating a scarce life-saving resource. In actuality, there is a great need to increase the number of donors. This can be done by making the general public aware that each donor can save as many as five lives of terminally ill patients. Donation of organs needs to be discussed among family members.There are many performance measures that need to be taken into account in selecting a liver allocation policy. A policy must balance the utility of an organ placement with the equity involved in treating all patients in the same manner. Simulation is a tool that has supported policy selection in this complex medical environment.8 INTEGRATION OF AWESIM WITHOTHER SOFTWAREAweSim was designed to integrate easily with other Windows applications. AweSim is built on a relational database which is accessible with standard tools such as Dbase, Access, FoxPro and Excel. Input data is easily moved from an Excel worksheet to the AweSim input tables. Output data is stored in AweSim output tables, available for creating custom reports using a favorite tool. In addition to standard output data, raw data from the simulation can be stored in standard database or Excel format for analysis, manipulation, or presentation. Data used to create AweSim output graphics can also be exported “on the fly” to an output file for use in any tool accepting comma-delimited input.An AweSim animation can use graphics created from other programs. As mentioned in the discussion of animations, the graphical elements manipulated by the animator can be created using CAD, drawing or paint programs and loaded into AweSim by using the Windows bitmap format. The output charts and plots created by AweSim can be exported via the clipboard to other applications. For example, a pie chart created by AweSim may be copied to the clipboard and pasted into a word processing document describing the results of the model.9 SUMMARYAweSim is a new simulation support system. which takes advantage of the latest Windows technology in order to provide a simulation support system able to interface with a variety of familiar tools. It incorporates the Visual SLAM modeling methodology. AweSim is distributed by Pritsker Corporation, which offers regularly scheduled training classes as well as applications support.REFERENCESPritsker, A.A.B. et al, "Organ Transplantation Policy Evaluation", Proceedings, 1995 Winter Simulation Conference, pp. 1314-1323. Pritsker, A.A.B., O.P. Daily and K.P. Pritsker, "Using Simulation to Craft a National Organ Transplantation Policy", Proceedings, 1996 Winter Simulation Conference, pp. 1163-1169. Pritsker, A.A.B., J.J. O'Reilly and D.K. LaVal, Simulation with Visual SLAM and AweSim, John Wiley and Systems Publishing Corporation, 1997. Pritsker, A.A.B., J.J. O'Reilly, Solutions Manual for Simulation with Visual SLAM and AweSim, Systems Publishing Corporation, 1997.Pritsker Corporation, AweSim! User's Guide, West Lafayette, IN, 1997.Pritsker Corporation, Visual SLAM Quick Reference Manual, West Lafayette, IN, 1997.AUTHOR BIOGRAPHIESA. ALANB. PRITSKER is Chairman of the Board of Pritsker Corporation. He obtained a Ph.D. from The Ohio State University in 1961. In 1967, he was awarded the IIE Distinguished Research Award for his pioneering work on network simulation languages. In 1985, he was elected to the National Academy of Engineering for the basic concepts underlying discrete/continuous simulation languages. Dr. Pritsker served twice as a member of the Board of Directors ofthe WSC and as Board Chairman in 1984 and 1985. AweSim: The Integrated Simulation System 551。