《平衡机器人》
新型自平衡机器人在建筑混凝土施工中的应用

新型自平衡机器人在建筑混凝土施工中的应用一、引言自平衡机器人是一种新型的机器人技术,它能够通过内置的传感器和算法,实现自主平衡,具有灵活性和高效率的特点。
在建筑混凝土施工中,自平衡机器人的应用能够提高施工效率,降低工人的劳动强度和施工风险,有助于推动建筑行业的智能化和自动化发展。
二、自平衡机器人的原理与特点1. 自平衡机器人的原理自平衡机器人的平衡控制系统是通过机器人的倾斜角度和角速度进行控制的。
机器人内置的加速度计和陀螺仪传感器可以实时监测机器人的倾斜角度和角速度,然后通过控制机器人上下左右的电机来实现平衡控制。
2. 自平衡机器人的特点(1) 自主平衡:自平衡机器人能够实现自主平衡,无需外部干预。
(2) 灵活性:自平衡机器人具有灵活性,能够在狭小的空间内进行施工。
(3) 高效率:自平衡机器人的施工效率高,能够快速完成施工任务。
(4) 降低风险:自平衡机器人能够降低工人的劳动强度和施工风险,提高施工安全性。
三、自平衡机器人在建筑混凝土施工中的应用1. 混凝土浇筑自平衡机器人可以在混凝土浇筑过程中起到重要作用。
它能够在施工现场自主平衡,准确地测量浇筑深度和混凝土密实度,确保混凝土施工质量。
2. 等级仪测量等级仪是建筑施工中用于测量地面高度和水平度的测量工具。
自平衡机器人可以搭载等级仪进行测量,实现高精度的测量结果。
3. 砼抹平机械化施工传统的混凝土施工中,需要工人手工操作砼抹平板进行抹平,工作强度大、效率低。
自平衡机器人可以搭载砼抹平机进行施工,实现机械化施工,提高施工效率和质量。
4. 混凝土喷涂混凝土喷涂是一种常用的混凝土施工方式,但传统的混凝土喷涂需要工人手持喷涂枪进行施工,工作强度大、效率低。
自平衡机器人可以搭载混凝土喷涂机进行喷涂,实现机械化施工,提高施工效率和质量。
四、自平衡机器人在建筑混凝土施工中的优势1. 提高施工效率自平衡机器人能够实现机械化施工,提高施工效率,减少人工操作时间和劳动强度。
两轮自平衡智能机器人的设计与制作

Course Education Research
课程的学时一般都是在 48 到 64 个学时之间遥由于工程管理在工 程项目施工组织方面上学习到的专业知识比房地产经营与估价
的学生要多一些袁因此他们的学时就相对少一些遥 那么在对于房 地产经营与估价的学生而言袁 他们就要充分补充在施工组织尧建 筑工程基础等方面的基础知识袁这样有助于学生了解工程项目管 理的系统管理方式袁进而更好地对房地产项目进行经营管理遥
三尧从实践教学及课程项目设计的角度上分析 目前的高职的教育方式就是提倡学生能自主学习袁 通过实 践教学增强学生的专业素养和专业技术遥而叶工程项目管理曳这个 课程的各个章节内容相对比较独立袁任务联系也不紧密袁因此在 教学的过程中存在一定的难度袁所以要进行分项目的案例教学模 式遥 那么这样的情况下可以采用多媒体的教学模式袁 利用信息 技术的资源和力量袁以模块案例教学的形式教学遥 并在课上多点 组织学生的互动袁让学生以小组的形式完成一些案例的分析和管 理袁提高学生的参与度和增强学生的学习积极性袁以培养学生的 独立思考能力和独自解决问题的习惯和能力遥学校应该以不同难 度的项目对学生进行综合训练袁让学生能学会主动去学习袁自己 解决困难袁积极思考超前学习遥 那么在以后工作的过程中遇到的 麻烦和困难就不会无从下手遥 四尧课程建设方面的几点意见 第一袁考核方案的改革 大部分的高职都存在考核方案有漏洞和缺点的问题袁 那么 为了改善学校的管理和教学袁 学校都会在这些问题上进行改革遥
. All Rights Res两erv轮ed自. 平衡智能机器人的设计与制作
田啸宇 陈 扬 张 婷
渊上海工程技术大学工程实训中心 上海 201620冤
揖摘要铱本文主要介绍了两轮自平衡机器人的设计系统方案遥 该方案以 K60 系列单片机作为系统控制处理器袁采用陀螺仪尧加速
基于串级控制的自行车机器人平衡控制BalancecontrolofbicycleRobotbased
基于串级控制的自行车机器人平衡控制Balance control of bicycle Robot based on Cascade Control发布时间:2021-10-11T08:50:21.241Z 来源:《科学与技术》2021年第29卷第15期作者:朱炀爽[导读] 自行车机器人可以作为研究欠驱动非完整约束系统力学建模、非线性控制策略等问题的一个较高层次的实验平台。
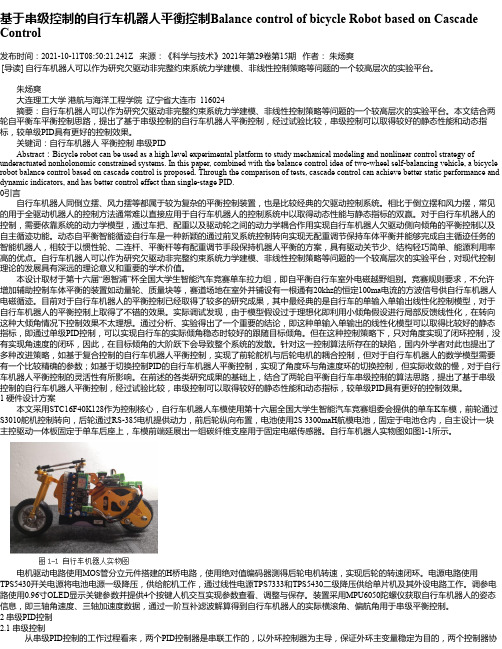
朱炀爽大连理工大学港航与海洋工程学院辽宁省大连市 116024摘要:自行车机器人可以作为研究欠驱动非完整约束系统力学建模、非线性控制策略等问题的一个较高层次的实验平台。
本文结合两轮自平衡车平衡控制思路,提出了基于串级控制的自行车机器人平衡控制,经过试验比较,串级控制可以取得较好的静态性能和动态指标,较单级PID具有更好的控制效果。
关键词:自行车机器人平衡控制串级PIDAbstract:Bicycle robot can be used as a high level experimental platform to study mechanical modeling and nonlinear control strategy of underactuated nonholonomic constrained systems. In this paper, combined with the balance control idea of two-wheel self-balancing vehicle, a bicycle robot balance control based on cascade control is proposed. Through the comparison of tests, cascade control can achieve better static performance and dynamic indicators, and has better control effect than single-stage PID.0引言自行车机器人同倒立摆、风力摆等都属于较为复杂的平衡控制装置,也是比较经典的欠驱动控制系统。
平衡机器人的原理

平衡机器人的原理
平衡机器人的原理主要依赖于内部的机械结构和控制系统,其中,陀螺仪是关键的传感器之一。
具体来说,平衡机器人需要具备稳定的机械结构,包括设计合理的重心位置、稳定的支撑点,以及适当的惯性力和弹性力的控制等。
此外,机器人的自平衡系统也发挥了重要作用,其利用倒立摆原理,通过机器人底部的不断来回移动,使其顶部的重量永远保持在其上方的中心,以此达到平衡状态。
为了实现自主移动和避障功能,平衡机器人通常配备有多种传感器和地图测绘系统。
在接取物体时,机器人手臂抬起的同时身体重心会配合着向后微微倾斜,两条腿则会小幅前后移动使整体保持平衡。
为了实现更准确的物体定位和抓取,平衡机器人还会利用机器视觉、深度学习等技术进行物体识别和姿态判断。
总之,平衡机器人的工作原理涉及到多个领域的知识和技术,包括机械设计、控制系统、传感器技术、机器视觉等。
这些技术的综合应用使得平衡机器人能够实现在复杂环境下的稳定运行和自主导航。
基于模糊信息融合的自平衡机器人姿态角补偿方法
基于模糊信息融合的自平衡机器人姿态角补偿方法
樊龙龙;李洪兴;翟晨汐;杨伽利
【期刊名称】《科学技术与工程》
【年(卷),期】2014(014)007
【摘要】为了简便、精确地获得自平衡机器人运行中的状态信息,提出了模糊信息融合的方法对机器人的姿态角进行补偿.首先,根据传感器的工作原理,以及对实验数据的分析建立了陀螺仪漂移误差的数学模型,对其零点随机漂移误差进行了初步的标定.然后根据陀螺仪和倾角传感器各自的误差特性,以及导致这些误差的原因,设计了一个双输入单输出的模糊融合器,将设计的融合器应用到两轮自平衡机器人系统中.实验结果表明系统误差得到了很好的改善,从而表明所设计的模糊融合器是有效的.
【总页数】6页(P34-39)
【作者】樊龙龙;李洪兴;翟晨汐;杨伽利
【作者单位】大连理工大学模糊信息研究所,大连116023;大连理工大学模糊信息研究所,大连116023;大连理工大学模糊信息研究所,大连116023;深圳市元创兴科技,深圳518055
【正文语种】中文
【中图分类】TP242.6
【相关文献】
1.双臂空间机器人基于高斯型函数的姿态、关节运动模糊自适应补偿控制 [J], 梁捷;陈力
2.基于模糊控制信息融合方法的机器人导航系统 [J], 薛艳茹;郑冰;郝兴贞;李谦
3.基于模糊控制信息融合方法的机器人导航系统 [J], 薛艳茹;郑冰;郝兴贞;李谦
4.基于模糊强化学习的双轮机器人姿态平衡控制 [J], 闫安;陈章;董朝阳;何康辉
5.基于KF的自平衡机器人姿态角补偿方法 [J], 李潮全;高学山;王树三;李科杰因版权原因,仅展示原文概要,查看原文内容请购买。
机器人的动态平衡与控制算法研究

机器人的动态平衡与控制算法研究随着科技的不断发展,机器人在日常生活和工业领域的运用越来越广泛。
机器人的动态平衡与控制算法是其中一个重要的研究领域。
本文将探讨机器人动态平衡的概念、挑战以及一些常用的控制算法。
机器人动态平衡是指机器人在运动过程中能够保持稳定的状态,即使在不平坦的地形上或受到外力的干扰。
实现动态平衡对于机器人来说是一项极具挑战性的任务,因为机器人需要通过传感器获取外部环境信息,并实时调整自身的姿态和运动来保持平衡。
为了实现机器人的动态平衡,研究人员开发了多种不同的控制算法。
以下是几种常见的算法:1. PID控制算法PID控制算法是一种经典的控制算法,被广泛应用于机器人动态平衡。
PID控制器通过测量偏差和对应的比例、积分和微分控制来调整机器人的姿态。
这些控制信号将使机器人能够根据外部环境的变化做出相应的调整,从而实现动态平衡。
2. 动态模型控制算法动态模型控制算法利用机器人的动力学模型来实现平衡控制。
它将机器人的动态特性建模为一个数学模型,并根据该模型设计相应的控制律。
这种算法的优势在于可以考虑到机器人的物理特性,对于不同的机器人类型和任务有更好的适应性。
3. 模糊控制算法模糊控制算法是一种基于人工智能的控制方法,可以处理模糊和不确定性的系统。
在机器人动态平衡中,模糊控制器可以根据模糊的输入和输出关系,通过模糊推理来调整机器人的姿态。
这种算法的优势在于它可以处理非线性和非确定性的系统,对于复杂的动态环境有较好的适应性。
上述算法只是机器人动态平衡控制中的一部分,实际应用中可能会根据需求选择不同的算法或结合多种算法进行控制。
除了算法选择,还有其他一些因素需要考虑,如传感器的选择,控制器的性能和应用场景的变化等。
然而,机器人动态平衡与控制算法研究也面临一些挑战。
首先,机器人的动态平衡是一个多变量、非线性和高度耦合的问题,需要设计相应的复杂算法来解决。
其次,精密的传感器和实时的控制器是实现动态平衡的关键,但同时也增加了系统的成本和复杂度。
基于模糊控制的全位移平衡机器人设计

收稿日期:2022-04-16基金项目:山东省自然科学基金项目(ZR2020MF093);山东省研究生教育优质课程(SDYKC20026);中石油重大科技合作项目(ZD2019 183 003)引用格式:刘恒,李哲,杨明辉,等.基于模糊控制的全位移平衡机器人设计[J].测控技术,2023,42(7):102-109.LIUH,LIZ,YANGMH,etal.DesignofFullDisplacementBalancingRobotBasedonFuzzyControl[J].Measurement&ControlTechnology,2023,42(7):102-109.基于模糊控制的全位移平衡机器人设计刘 恒,李 哲,杨明辉,邓晓刚,曹玉苹(中国石油大学(华东)控制科学与工程学院,山东青岛 266580)摘要:设计了一种模糊控制的四轮全位移平衡机器人,通过SolidWorks改进设计了基于麦克纳姆轮的全位移平衡底盘、双轴云台等机械结构。
以AltiumDesigner为开发平台设计了STM32F405核心板主控,外设电路设计主要包括:ICM20948传感器电路、CAN通信差分电路等。
使用Simulink对算法进行仿真验证,云台控制算法使用了串级PID控制,底盘通过HI220陀螺仪传感器结合模糊控制算法实现平衡及运动。
最终制作出了实体机器人并对模糊控制算法进行了验证,与传统PID算法相比,基于模糊控制的平衡机器人在响应速度、鲁棒性、稳定性等方面均有一定的提升。
相比于传统四轮机器人,制作的平衡机器人能够更好地通过狭小的空间,对环境的适应性更强。
关键词:模糊控制;视觉识别;全位移;平衡机器人中图分类号:TP242.6 文献标志码:A 文章编号:1000-8829(2023)07-0102-08doi:10.19708/j.ckjs.2022.08.298DesignofFullDisplacementBalancingRobotBasedonFuzzyControlLIUHeng牞LIZhe 牞YANGMinghui牞DENGXiaogang牞CAOYuping牗CollegeofControlScienceandEngineering牞ChinaUniversityofPetroleum牗EastChina牘牞Qingdao266580牞China牘Abstract牶Afour wheelfulldisplacementbalancingrobotwithfuzzycontrolisdesigned.ThroughSolidWorks牞mechanicalstructuressuchasfulldisplacementbalancingchassisandbiaxialheadaredesignedbasedonMc Namwheel.STM32F405coreboardmaincontrolisdesignedwithAltiumDesignerasthedevelopmentplat form牞andtheperipheralcircuitdesignmainlyincludes牶ICM20948sensorcircuit牞CANcommunicationdiffer entialcircuit牞etc.Simulinkisusedtosimulateandverifythealgorithm牞thegimbalcontrolalgorithmusescas cadePIDcontrol牞andthechassisisbalancedandkinematicbyusingtheHI220gyroscopesensorcombinedwithfuzzycontrolalgorithm.Finally牞asolidrobotisproducedandthefuzzycontrolalgorithmisverified.Com paredwiththetraditionalPIDalgorithm牞thebalancedrobothascertainimprovementinresponsespeed牞robust nessandstability.Comparedwiththetraditionalfour wheelrobot牞thebalancingrobotcanbetterpassthroughthesmallspaceandhasstrongeradaptabilitytotheenvironment.Keywords牶fuzzycontrol牷visualrecognition牷fulldisplacement牷balancedrobot随着世界经济和科技的高速发展以及人口数量的不断增多,人类对于各类资源的需求与日俱增,促使各国纷纷开始对未知风险的领域与地区进行资源的勘探与开发。
双足轮式机器人的设计与运动仿真

双足轮式机器人的设计与运动仿真
王健;张颖琳;周万勇
【期刊名称】《电子制作》
【年(卷),期】2024(32)10
【摘要】双足轮式机器人是一种轮腿相结合的双轮自平衡机器人,其不仅具有双轮平衡车灵活简便的特点,还具有更强的复杂地形环境适应能力。
该文针对传统双轮
自平衡机器人适应复杂地形环境能力差的问题,设计了一种可以适应复杂地形环境
下的轮腿结合的自平衡机器人。
该机器人由机身、腿部机构、控制系统及关节电机、驱动电机等组成。
机器人控制系统采用可编程逻辑控制器PLC作为核心控制器,控制器通过实时采集陀螺仪的姿态数据,结合基于LQR的平衡控制算法,可以更快地对机器人自身平衡偏差做出快速反应。
机器人在面对崎岖陡峭地形时,在控制器的快
速响应和平衡控制算法的准确输出下,通过调节机身左右两侧的关节电机的角度带
动腿部机构伸缩可以保持机身滚转方向的平衡,调节驱动电机的速度输出可以保持
机器人的俯仰方向平衡,在关节电机和驱动电机的共同调节下,实现机器人运动平衡
状态。
该文通过Adams运动仿真和搭建实物模型的方式,验证了所设计的机器人
在复杂地形下有着更好的适应能力。
【总页数】3页(P6-8)
【作者】王健;张颖琳;周万勇
【作者单位】北华航天工业学院机电工程学院;北华航天工业学院电子与控制工程
学院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.可轮式运动的小型双足机器人控制系统设计
2.小型双足步行机器人的机构设计及其运动仿真
3.双足滚轮式溜冰机器人及其运动学建模
4.被动动力式双足机器人仿生腿的设计与运动仿真研究
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业机器人设计
题目:平衡式机器人
姓名:李路非闫瑞雪赵菲学号:20092001072/76/75班级:09级机电一体化4班
平顶山工业职业技术学院
2010年11月27日
目录
第1章机器人设计 (4)
1.1设计任务 (4)
第2章控制原理分析 (4)
2.1自动控制系统 (4)
2.2闭环控制系统 (4)
2.3反馈 (5)
第3章制作步骤 (5)
3.1所需材料 (6)
3.2制作步骤 (6)
第4章结论 (8)
参考文献 (9)
摘要
本机器人属简易机器人,主要靠电机来实现小车的驱动,这个平衡机器人相当的“简陋”,但是却也是不平凡的,首先它用简单的方式实现了倒钟摆的平衡,虽然时间不久,但就其原理来说却是一切平衡机器人的基础,另外它也说明了自动控制的一种重要的控制方式,反馈,闭环反馈,这可能对刚刚接触机器人或者说其他自动控制系统的人是有趣的教育模式;其次,它告诉我们一个事实,人类的想象力是惊人的,也让我们反思,有很多的时候我们用很复杂的方法却来解决很简单的问题,同样却有人用简单的方法来解决复杂的问题。
关键词:平衡机器人、控制方式、闭环反馈、想象力
第一章机器人设计
1.1设计任务
设计并制作一个简易的平衡式机器人,使其能在电动机的驱动下实现行走。
第二章机器人控制原理分析
2.1自动控制系统
自动控制系统(automatic control systems)是在无人直接参与下可使生产过程或其他过程按期望规律或预定程序进行的控制系统。
自动控制系统是实现自动化的主要手段。
按控制原理的不同,自动控制系统分为开环控制系统和闭环控制系统。
2.2闭环控制系统
闭环控制系统是建立在反馈原理基础之上的,利用输出量同期望值的偏差对系统进行控制,可获得比较好的控制性能。
闭环控制系统又称反馈控制系统。
闭环控制是控制论的一个基本概念。
指作为被控的输出以一定方式返回到作为控制的输入端,并对输入端施加控制影响的一种控制关系。
在控制论中,闭环通常指输出端通过“旁链”方式回馈到输入,所谓闭环控制。
输出端回馈到输入端并参与对输出端再控制,这才是闭环控制的目的,这种目的是通过反馈来实现的。
正反馈和负反馈是闭环控制常见的两种基本形式。
其中负反馈和正反馈从达于目的的角度讲具有相同的意义。
从反馈实现的具体方式来看,正反馈和负反馈属于代数或者算术意义上的“加减”反馈方式,即输出量回馈到输入端后,与输入量进行加减的统一性整合后,作为新的控制输出,去进一步控制输出量。
实际上,输出量对输入量的回馈远不止这些方式。
这表现为:运算上,不止于加减运算,还包括更广域的数学运算;回馈方式上,输出量对输入量的回馈,也不一定采取与输入量进行综合运算形成统一的控制输出,输出量可以通过控制链直接施控于输入量等等。
闭环控制有反馈环节,通过反馈系统使系统的精确度提高,响应时间缩短,适合于对系统的响应时间,稳定性要求高的系统.
2.3反馈
反馈(feedback)又称回馈,是控制论的基本概念,指将系统的输出返回到
输入端并以某种方式改变输入,进而影响系统功能的过程,即将输出量通过恰当的检测装置返回到输入端并与输入量进行比较的过程。
反馈可分为负反馈和正反馈。
前者使输出起到与输入相反的作用,使系统输出与系统目标的误差减小,系统趋于稳定;后者使输出起到与输入相似的作用,使系统偏差不断增大,使系统振荡,可以放大控制作用。
对负反馈的研究是控制论的核心问题。
把放大器的输出电路中的一部分能量送回输入电路中,以增强或减弱输入讯号的效应。
增强输入讯号效应的叫正反馈;减弱输入讯号效应的叫负反馈。
正反馈常用来产生振荡;负反馈能稳定放大,减少失真,因而广泛应用于放大器中。
第三章制作步骤
3.1所需材料
需要以下的设备来完成简易平衡机器人:
1、小的电机;
2、一些齿轮;
3、一根轴;
4、两个轮子;
5、一个电路板,用来做机器人的轴承套和脖子;
6、4节5号电池;
7、一个耳机;
8、单极双掷开关;(俗称微动开关)
9、拨动开关;
10、焊锡丝;
11、一些电线。
3.2制作步骤
1、准备材料。
2、把电机和轴、轮子连接起来,使用上述材料里准备的齿轮、电机、轮子等把他们有机的组合起来。
3、把电路板用胶水固定到电机上,然后在电路板的两边分别涂上胶水,把电池粘在最高处。
(电池盒和电机之间这段电路板就叫做脖子了)
4、把耳机头粘到微动开关上。
然后把电路板和微动开关一起粘在电动
机上。
要特别注意耳机头的位置,要保证耳机头能正好碰到地面,这很关键。
(这个位置的确定很关键,要保证机器人垂直于平面)这是这个机器人成功与否的关键。
5、根据线路图连接。
(如右上图所示)
6、装上电池,看看它是否正常工作吧。
调整微动开关的位置,让它工作的更好。
如果颠倒了,那就更换一下正负极的电线。
第四章结论
通过这次的机器人的制作,是我们对机器人的认识更具体,形象了。
也许有很多人并不屑这个机器人的制作,但是对于刚刚接触机器人的我们来说,这确实是个很好的机器人,有趣,而且制作起来也不困难。
通过制作这个机器人,是我们对这门课程产生了更加浓厚的兴起,对以后更好的学好这门课程打下了基础。
参考文献:
《工业机器人》
《机器人天空》
《机器人爱好者》。