自平衡两轮移动机器人的LQR控制策略研究
基于LQR控制的机器人自行车静态平衡研究

基于LQR控制的机器人自行车静态平衡研究【摘要】本文研究基于LQR控制的机器人自行车静态平衡,通过对自行车静态平衡原理和LQR控制原理进行分析,设计了基于LQR控制的自行车静态平衡系统。
实验结果表明,该系统具有良好的静态平衡效果,并且在不同路面环境下均表现出稳定性。
讨论部分对系统的性能和优化方向进行了探讨。
总结部分对研究的成果进行总结,并展望了未来的研究方向。
通过本研究,可以为机器人自行车的控制技术和智能化发展提供参考。
【关键词】自行车、静态平衡、LQR控制、研究、机器人、设计、实验结果、分析、讨论、总结、展望、结论、研究背景、研究目的、研究意义、原理分析、自行车静态平衡设计。
1. 引言1.1 研究背景自行车在运行过程中需要保持稳定,特别是在停止或低速行驶时更容易失去平衡。
研究如何实现自行车的静态平衡,不仅可以提高自行车的控制性能,还可以增强骑行者的安全感。
对于自行车静态平衡的研究具有重要的实际意义。
通过引入LQR(线性二次调节)控制方法,可以实现自行车的静态平衡控制。
LQR控制是一种经典的控制理论方法,通过优化系统状态与控制输入之间的权衡关系,可以有效地实现系统的稳定控制。
基于LQR控制的自行车静态平衡设计,可以更好地控制自行车的倾斜角度,提高自行车的稳定性和控制性能。
本研究旨在通过对自行车静态平衡原理和LQR控制原理的分析,设计基于LQR控制的自行车静态平衡方案,进一步通过实验结果分析和讨论,探讨如何提高自行车的控制性能和稳定性。
1.2 研究目的本研究的主要目的是通过对基于LQR控制的机器人自行车静态平衡进行深入研究,探讨如何利用现代控制理论和算法实现机器人在自行车上的静态平衡。
具体包括以下几个方面的目的:1. 研究自行车静态平衡的原理,分析机器人在自行车上实现平衡的关键因素,为后续基于LQR控制的设计提供理论基础和指导。
2. 探究LQR控制的原理和优势,分析其在自行车静态平衡控制中的应用价值,为设计出高效稳定的控制算法奠定基础。
两轮自平衡机器人的LQR实时平衡控制_张金学

图1 NXT两轮自平衡机器人 半径;a为倒立摆转动角加速度;I为倒立摆转动惯
Fig.1 Self-balancingtwo-wheeled NXTrobot 量;I 为角度转动惯量。
ω
LEGO Mindstorm NXT是由乐高公司推出的新 根据直流电动机的动态性,电机转矩可以表示为一代LEGO机器人套件,该套件包括可编程控制器 dω
关键词:两轮平衡机器人;LQR;平衡;倒立摆
中图分类号:TP273 文献标志码:A
Real-time Balance Control for Self-balancing Two-wheeled Robot with LQR
ZHANG Jin-xue,ZHANG Ming
其中:H 为左轮中心水平扭矩。 觶
L -2kmke x 2km
C+C= + V (14)
L R R r R a
由于作用于车轮中心的是直线运动,因此可以
通过简单的转换将角旋转转化为直线运动。 将方程(14)带入到方程(13)可以得到:
枢电压。
Studio开发工具, 美国的卡内基大学也针对LEGO 将方程(4)代入到方程(2),可以得到:NXT开发了专门在NXT上编程的程序设计工具 -kk k I
m e 觶 m w咬
HfR= θw+ Va- θw (5)RobotC。 R Rr r
副教授,研究方向为无线传感器网络与机器人技术。
自动化与仪表 2013(5) 5 专题研究
由美国发明家狄恩-卡门发明的两轮平衡运输
车“ ”[4]是得到很好的商业应用的两轮机器人,
Segway 2 系统动态性
Segway使用5个陀螺仪和其它的倾斜传感器用于 为了方便为平衡机器人开发高效的控制系统,需保持自身的平衡,当使用者使用Segway穿过某一区 要应用一个数学模型描述机器人的动态性。倒立摆的域时,能够使得站在其平台上的人保持平衡。 原理为自然不稳定系统提供了数学建模。倒立摆系统
两轮自平衡机器人的LQR和PID实验
用以在线学习两足机器人的平衡控制的CTRNN和BPTT算法的即时实现:站立姿态实验摘要:为了学习机器人控制规则,本文描述了CTRNN算法和BPTT算法的即时实现实验的结果。
实验的目的是为了控制一个两足步行机器人模型在站立姿态下保持平衡。
机器人通过神经控制器控制其关节运动来补偿外界扰动的影响。
在机器人的即时电子单元中嵌入程序算法。
同时,文中详细介绍了在线学习的实现。
最后,实验结果的学习行为和控制性能证明了所提方法的可行性和效率。
1、介绍随着技术的发展,人们得以将来自人体或动物形体的启发应用于机器人制作。
因此,最新的仿人机器人是一种集成了高端机械技术与电子技术的复杂系统。
这些机器人具有完整的感知系统,能够进行人机交互,且能够在人们的日常生活环境中运动。
如何控制机器人在行走或站立时的平衡是控制仿人机器人的一大难题。
解决这一问题的一种方法是根据零力矩点理论设计控制器;另一种方法是利用仿生控制器,即具备适应能力,且能够通过训练获得所需反应的方法。
为了能够了解如何“正确”控制机器人保持平衡,利用诸如神经网络等仿生架构是一个很有希望的途径。
为此,人们在过去提出了几个基于神经元控制器的设想。
其中,Albus(1975)在1975年提出的小脑模型关节控制器(CMAC)设想在控制腿式机器人领域仍为人们所研究。
近期的研究主要涉及CMAC的建模及其泛化性能(Horvath&Szabo,2007),或是CMAC与其他诸如模糊逻辑(Su,Lee&Wang,2006),计算力矩控制(Lin&Chen,2007)等的联系。
CMAC 已被应用于控制两足步行机器人的平衡(Kun&Miller,1996)、鲁棒动态行走仿真(Lin&Chen,2007)及两足步行机器人实验(Sabourin&Bruneau,2005)等领域。
多年以来,循环神经网络(即动态神经网络)在复杂系统的控制领域被广泛研究(Marcua,Köppen-Seligerb,&Stücher,2008;Song&Tahk,2001)。
基于改进型有限时间LQR的平衡车控制研究
基于改进型有限时间LQR 的平衡车控制研究刘锐军1,谢广明2,罗文广*1(1.广西科技大学电气与信息工程学院,广西柳州545006;2.北京大学工学院,北京100871)摘要:针对平衡车启动及停止时发生抖动的问题开展了相应的研究.通过建立系统动力学模型,设计了系统的改进型有限时间LQR (LQR ,Linear Quadratic Regulator )控制器;对系统矩阵及控制矩阵进行改进,增加小范围增量矩阵,系统能够实现自适应调节,并使最优控制率在小范围内可调,进而使性能指标达到最佳;通过仿真计算并选取最佳的加权矩阵Q 和R ,使性能指标达到最优.仿真实验表明该方法具有可行性和实用性,解决了小范围不稳定情况,有效克服了超调量过大而引起的不稳定.关键词:线性二次型;加权矩阵;最优控制器;MATLAB 仿真中图分类号:U489;TP273DOI :10.16375/45-1395/t.2019.02.0050引言平衡车是电动车的一种,市场上的平衡车主要分为独轮和双轮两种,其关键技术是动态稳定控制.就双轮平衡车而言,传统的平衡车是靠陀螺仪和加速传感器来检测车体的姿态变化,同时用伺服控制系统来驱动电机以确保系统的稳定.1985年日本提出了两轮平衡车的模型,经过21世纪初的一个快速发展期,多个国家对该模型进行优化改进研究,主要有美国、日本、瑞士和法国等,直到2005年日本发布了“村田顽童”自行车机器人,该模型有了质的飞跃.国内关于平衡车的研究起步较晚,主要集中在高校,如:清华大学、西北工业大学等高校.目前平衡车的快速发展,也大力支持高校与企业之间合作及共同开展项目研究.平衡车是在新产品的迭代创新过程中改进的.双轮平衡车在启动和停止时会出现抖动不稳的现象,需要一种控制方法来解决该问题,以确保其安全性.经典的线性二次型调节器LQR 是一种具有较好鲁棒性的控制器,其研究对象是现代控制理论中以状态空间形式给出的线性系统,而性能指标函数为对象的状态和控制输入的二次型函数.LQR 问题之所以受到普遍重视是因为它的应用不局限于某种物理系统,具有普遍意义且鲁棒性较强.LQR 最优控制器设计主要是求出状态反馈控制的增益K ,使二次型性能指标函数J 取最小值,而K 由加权矩阵Q 和R 唯一决定,故此Q 和R 的选择尤为重要.本文将LQR 控制器进行改进,以解决小范围不稳定情况.该方法应用到双轮平衡车上可以精确地检测车身偏移角度,并结合精密的中央处理器下达指令使陀螺仪能够及时调整车身角度,从而达到平衡控制[1].收稿日期:2018-11-08基金项目:国家自然科学基金项目(61563006)资助.*通信作者:罗文广,教授,硕士研究生导师,研究方向:智能控制与智能自动化,E-mail :lwg168@.第30卷第2期2019年6月广西科技大学学报JOURNAL OF GUANGXI UNIVERSITY OF SCIENCE AND TECHNOLOGYVol.30No.2Jun.2019第2期1双轮平衡车系统建模1.1系统模型建立双轮平衡车简称移动机器人.近几年研究的移动机器人有很多种类,包括:仿生的爬行机器人、类似动物运动的四脚机器人以及装甲车式的履带爬楼机器人等.这些机器人的发展为人们带来了实际效益,同时也带来了很大的方便.双轮平衡车在实际生活当中应用最广泛,例如,大型运动场、大型商场的治安员等都会用到双轮平衡车来快速达到短距离目的地[2-3].由于轮式机器人要比足式或爬行机器人的速度要高,因此需要轮式机器人在运动控制上具有较高的精度.这就要求控制器在设计上采用高性能控制策略,使其能够在运行过程中进行准确的定位.以下根据平衡车结构建立系统模型,分析其动力学模型,并建立动力学方程[4-5].图1所示为双轮平衡车的结构.建模中涉及到的参数如表1所示.1.1.1对车轮建模左、右车轮力学方程及转动惯量为:M L X L =f L -T L ,J L φL =C L -f L r (1)M R X R =f R -T R ,J R φR =C R -f R r (2)1.1.2对摆杆建模①水平方向的平衡方程为:mx P =T R +T L(3)其中,x p =x m +S sin θ,x p =x m +S (θcos θ-θ2sin θ)x m =x L +x R2(4)②转矩方程为:J P θ=S (P R +P L )sin θ-S (T R +T L )cos θ(5)③垂直方向的平衡方程为:mx Z =-mg +P R +P L(6)其中,x Z =S (cos θ-1),x Z =S (θ2cos θ-θsin θ)④平衡车在转弯时的平衡方程为:表1双轮平衡车参数含义表Tab.1Two-wheel balance car parameter meaning table图1双轮平衡车系统结构示意图Fig.1Schematic diagram of dual -wheelvehicle system structure参数C L 、C R H L 、H R f L 、f R M L 、M R P L 、P RϕL 、ϕRJ ϕ、J P 、J φX L 、X R 、X mS 参数含义左右车轮的转矩底盘及轮子在水平方向的力左右车轮与地面的摩擦力左右轮子的质量底盘及轮子在垂直方向的力左右轮子的旋转角度轮子、摆杆及车体的转动惯量左右轮子及平均位移平衡车杆长度参数D gχχθθθψr参数含义两车轮的距离重力加速度速度加速度摆杆内部与Z 轴的夹角角速度角加速度摆杆转向角车轮半径刘锐军等:基于改进型有限时间LQR 的平衡车控制研究31第30卷广西科技大学学报J ψψ=(T R +T L )D2(7)ψ=-x R +x LD(8)⑤两轮平衡车的数学模型为:C R +C L r =x m (2J ϕr2+2M )-mSθ(9)-mLx m =θ(mS 2+J P )-mgSθ(10)-C R +C L r =ψ(DM +2J ψD +DJ ϕr2)(11)由式(9)—式(11)可得平衡车系统方程如下:éëêêêêêêùûúúúúúúx x θθ=éëêêêêêêùûúúúúúú0001a 210000010a 4100éëêêêêêêùûúúúúúúθx θθ+éëêêêêêêùûúúúb 11b 12b 21b 220000éëêùûúC R C L (12)éëêêùûúúψψ=éëêùûú0100éëêùûúψψ+éëêùûúb 11b 1200éëêùûúC R C L (13)由于本动力学方程有两个角度,必须满足一定的条件才能成立,式(9)—式(11)是在假设当θ在±5∘变化时(±5∘变化是指平衡车内部IMU 检测摆杆内部机械的偏差,而非平衡车摆杆的倾斜度或车身的倾斜度.因IMU 模块检测比较灵敏,故若检测值偏离太大,反映在摆杆及车身的角度远大于偏离值,因此±5∘符合要求),sin θ≈θ,cos θ≈1成立,满足该条件,从而θ2≈0.在平衡车中控制系统是关键的部分,整个车身的运行情况都由控制系统实现,因此,精准的控制系统设计是平衡车安全与否的关键.因为设计简单便捷,市面上大多平衡车采用PID 算法来控制.该算法应用到平衡车上,虽然能够很好的利用其闭环系统实现控制,但在精准控制上难以保证,因此迫切需要一种控制器来实现精准控制.LQR 控制器以其易于构成闭环系统、设计简单及能够较好的实现最优控制目的的优点,成为平衡车设计控制器的新方法.本文对LQR 控制器进行了改进,增加微量调节反馈矩阵,使其能够对启动及停止时的微小抖动问题实现良好的控制.2平衡车LQR 控制器设计LQR 即线性二次型调节器,LQR 可以得到状态线性反馈的最优控制规律,易于构成闭环最优控制,可在不消耗过多能量的情况下,保持系统状态各分量仍接近平衡状态.LQR 最优控制充分发挥成本低这一特点,使其原系统达到较好的性能指标,也可以对不稳定系统进行调整.线性二次型问题解出的控制率可以通过状态反馈实现闭环最优控制,成为当今控制工程领域中主要设计方法之一.由于目前很多平衡车在启动和停止时出现不可控制的抖动现象,导致车身不稳,对人身安全造成一定的危险,因此,本设计采用自加调节式系统控制,利用微小调节矩阵检测偏移角度,从而矫正偏移量,使平衡车能够在整体倾斜角度范围内,通过自加调节式系统克服角度差,使车身能够在偏离一定角度后立刻得到矫正.32第2期2.1传统设计方案状态调节器的任务在于,当系统状态由于任何原因偏离了平衡状态时,能在不消耗过多能量的情况下,保持系统状态各分量仍接近于平衡状态.在研究这类问题时,通常是把初始状态矢量看作扰动,把零状态取作平衡状态.因此,需要解决的问题是,寻求最优控制率u 矩阵,在有限时间内将系统初始状态转移到零点附近.平衡车系统在当前状态由于任何原因偏离了平衡状态时,要在最短时间内,保持系统状态各分量仍接近于平衡状态,尤其在外部干扰情况下要求系统状态转移到零点附近.其系统满足最优控制的线性二次型调节器.①系统状态方程为:x (t )=A (t )x (t )+B (t )u (t )x (t 0)=x 0y (t )=C (t )x (t )(14)②性能指标为:J =12e T (t f )F e (t f )+12∫t 0t f [e T(t )Q (t )e (t )+u T(t )R (t )u (t )]d t(15)其中,A (t )称为状态矩阵,B (t )称为控制输入矩阵,C (t )称为输出矩阵,x (t )∈R m ;u (t )∈R m ,无约束;y (t )∈R l ,0<l ≤m ≤n ;输出误差向量e (t )=z (t )-y (t ),z (t )∈R l ,为理想输出向量,要求确定最优控制u ∗(t ),使性能指标J 取得极小值[6-7].在系统方程(14)和二次性能指标式(15)中,如果C (t )∈I ,z (t )=0,则有:e (t )=-y (t )=-x (t )(16)那么将式(16)代入式(15)得性能指标为:J =12x T (t f )F x (t f )+12∫t 0t f [x T(t )Q (t )x (t )+u T(t )R (t )u (t )]d t(17)式(17)即为状态调节器的性能泛函.构造哈密顿函数(Hamilton )H [x ,u ,λ,t ]=12[x T (t )Q (t )x (t )+u T (t )R (t )u (t )]+λT [A (t )x (t )+B (t )u (t )](18)从而得到:u ∗(t )=-R -1(t )B T (t )P (t )x (t )=-K (t )x (t )(19)其中,K (t )=R -1(t )B T (t )P (t ),P (t )可以通过黎卡提(Riccati )微分方程来计算.P(t )=-P (t )A (t )-A T (t )P (t )+P (t )B (t )R -1(t )B T (t )×P (t )-Q (t )(20)式(17)中加权矩阵Q 是n ×n 维半正定矩阵,R 是r ×r 维正定矩阵;第一个积分项表示系统动态跟踪误差加权平均和的积分;第二个积分项表示系统控制能耗总量.LQR 最优控制器设计主要是求出状态反馈控制的增益K ,使二次型性能指标函数J 取最小值,而K 由加权矩阵Q 和R 唯一决定,故此Q 和R 的选择尤为重要.在本设计平衡车控制器中Q 和R 的选取主要取决于工程上的调试及结构设计,一般根据设计要求的不同来选择Q 和R 的大小从而加以约束状态量及控制量.2.2改进型的设计方案①系统状态方程为:x (t )=[]A +ΔA 1(t )x (t )+[]B +ΔB 1(t )u (t )x (t 0)=x 0y (t )=C 1(t )x (t )(21)其中,A 和ΔA 1为相同维数的矩阵,B 和ΔB 1也为相同维数的矩阵,ΔA 1与ΔB 1为不确定性矩阵,而这两个刘锐军等:基于改进型有限时间LQR 的平衡车控制研究33第30卷广西科技大学学报矩阵分别是在外界干扰时所产生的,通过调节ΔA 1与ΔB 1来确定系统的稳定[8].增量矩阵ΔA 1与ΔB 1是通过平衡车的IMU 检测后反馈系统的差值,根据差值适当增加ΔA 1与ΔB 1矩阵以达到稳定的目标.增量矩阵不是无限随意增加,根据平衡车抖动的范围设定增量矩阵的界限,因此在检测到偏差值后反馈给系统即可以确定增量矩阵大小,从而调节系统稳定性.②相应的u ∗(t )及P (t )如下:u *(t )=-R -1(t )[]B +ΔB 1T(t )P (t )x (t )=-K 1(t )x (t )(22)P(t )=-P (t )[]A +ΔA 1(t )-[]A +ΔA 1T(t )P (t )+P (t )[]B +ΔB 1(t )R -1(t )[]B +ΔB 1T(t )×P (t )-Q (t )(23)3仿真实验及分析3.1仿真实验数据选择式(24)—式(25)中,系统矩阵:A +ΔA 1;输入矩阵:B +ΔB 1;输出矩阵:C 1;输入向量:u ;状态向量:X ;输出向量:Y .在实际仿真中各参数值的设定如表2所示.选取各参数值确定系统方程式(24)、式(25),使用数据分析计算软件MATLAB 进行仿真实验.仿真结果分别以可视化图形展示,图2—图6分别表示不同情况下的仿真结果[9-12].本仿真实验根据设计要求及所要达到目标为依据,选择不同Q 和R 的大小对状态量及控制量进行约束.在不同的Q 和R 值下进行仿真对比并得出结论,如图2—图6所示.表2各参数仿真值Tab.2Reference values for each parameter仿真各参数值M =0.6kg r =0.12m D =0.6m J P =0.0028kg ·m 2J ψ=0.001kg ·m 2S =0.6m m =8kg g =9.8m/s 2J θ=0.001kg ·m 2J φ=0.001kg ·m2图2Q =[1000,0000,0010,0000],R =1Fig.2Q =[1000,0000,0010,0000],R =1图3Q =[1000,0100,0010,0001],R =1Fig.3Q =[1000,0100,0010,0001],R =1x =éëêêêêêêùûúúúúúúx x θθ=éëêêêêêêùûúúúúúú000110.1270000010-0.59100éëêêêêêêùûúúúúúúθx θθ+éëêêêùûúúú003.4532.671u Y =éëêêêêêêùûúúúúúúx x θθ=éëêêêêêêùûúúúúúú100001000010001éëêêêêêêùûúúúúúúx x θθ+éëêêêêêêùûúúúúúú0000u (24)(25)34第2期刘锐军等:基于改进型有限时间LQR 的平衡车控制研究3.2仿真结果分析由以上仿真实验得知:解决双轮平衡车在启动与停止时小范围抖动的问题,关键在控制器的设计,控制器的参数值是控制效果的直接决定因素.仿真中可以得出,改进型的控制器只要选定合理的参数就可以实现较短时间内达到稳定状态.图2和图4代表加权矩阵Q 相同而加权矩阵R 不同的情况.从图中可以看出在加权矩阵Q 相同R 不同时:当R 越小,摆杆的摆幅偏离中心方向越小,而且到达稳定时间较短,并且R 越小,会出现小范围的超调量,但很快就恢复正常.图2和图3代表加权矩阵R 相同Q 不同的情况.这种情况下改变Q 的单一向量会消除超调量,并且在控制摆幅相等时,稳定时间会更短.图5表明同时选择较大的Q 和R 会使平衡车出现明显的超调量,而且稳定性无法得到控制.图6是经过调试后确定的Q 和R 值,并得到的状态响应及最优控制曲线.图中可以看到平衡车在发生抖动时能够很快得到控制并趋于稳定,控制效果很好,在该条件下K =[-12.5419,-1.0000,20.2822,-22.6268].通过实验仿真验证了该方案的可行性,即:增加小范围偏移防抖动矩阵有效解决了双轮平衡车在启动及停止时刻出现小范围抖动的问题.4结束语大量的仿真结果表明,当在系统中引入可调节控制矩阵时控制效果比传统的效果好,并且可以较为简单的实现调节功能.本文利用力学知识对平衡车进行系统建模,计算出系统方程;通过黎卡提(Ricca⁃ti )微分方程来计算,从而得出P (t ),进而计算出反馈矩阵.另外,在控制过程中Q 和R 的选取对控制效果有明显的影响,而且二者是相互制约的关系,改变其中任何一个都会有较大影响,在多次试验后选取了最优控制的加权矩阵Q 和R .文中虽然达到了控制效果,但还需改善达到最优控制的时间,才能使系统更加快速的达到稳定状态,该方案将在实际工程中具有很好的参考与指导价值.图4Q =[1000,0000,0010,0000],R =2Fig.4Q =[1000,0000,0010,0000],R =2图5Q =[200000,0000,0010,0000],R =3Fig.5Q =[200000,0000,0010,0000],R =3图6Q =[1000,0100,0010,0001],R =1Fig.6Q =[1000,0100,0010,0001],R =13536广西科技大学学报第30卷参考文献[1]朱年华.两轮自平衡电动车控制系统设计与研究[D].南昌:华东交通大学,2016.[2]牛伯冕.线性最优控制方法及其在旋转倒立摆中的应用分析[J].自动化与仪器仪表,2018(2):183-186.[3]杨正才,吕科.基于模糊PID控制方法的两轮直立自平衡电动车研究[J].控制工程,2016,23(3):366-370.[4]薛凡,孙京诰,严怀成.两轮平衡车的建模与控制研究[J].化工自动化及仪表,2012,39(11):1450-1454.[5]申铁龙,梅生伟,王宏,等.鲁棒控制基准设计问题:倒立摆控制[J].控制理论与应用,2003,20(6):974-975.[6]段广仁.线性系统理论[M].2版.哈尔滨:哈尔滨工业大学出版社,2004.[7]张晓亮,罗文广.汽车主动悬架系统的线性二次最优控制研究[J].广西工学院学报,2011,22(4):44-48.[8]刘爱民,梁亚茹.基于修正型线性二次最优控制的PID参数优化方法及其应用[J].组合机床与自动化加工技术,2007(11):36-39.[9]周加全,罗文广,李亮,等.仿生机器鱼位姿模糊控制研究[J].广西科技大学学报,2017,28(2):17-22.[10]谢超艺,罗文广,张午昀,等.基于AD5435的永磁同步电机矢量控制系统仿真[J].广西科技大学学报,2015,26(2):8-13.[11]PRASAD L B,TYAGI B,GUPTA H O.Optimal control of nonlinear inverted pendulum system using PID controller andLQR:performance analysis without and with disturbance input[J].国际自动化与计算杂志(英文版),2014,11(6):661-670.[12]ENDERLE J D,WOLFE J W.Time-optimal control of saccadic eye-movements[J].IEEE Transactions on Biomedical Engi-neering,1987,34(1):43-55.Design of optimal controller for balanced vehicle basedon improved LQRLIU Ruijun1,XIE Guangming2,LUO Wenguang*1(1.School of Electric and Information Engineering,Guangxi University of Science and Technology,Liuzhou545006,China;2.Engineering School,Peking University,Beijing100871,China)Abstract:In this paper,a systematic study is made on the jitter problem of balancing vehicle when starting and stopping.The improved LQR(LQR,Linear Quadratic Regulator)controller is designed by establishing the system dynamics model.The system matrix and control matrix are improved to increase the matrix of small range increment,the system realizes the adaptive adjustment,and the optimal control rate is adjustable in a small range so as to achieve the best performance index.The improved method solves the small-scale instability and effectively overcomes the instability of the overshoot.We can find the Q and R values that make the best performance by the simulation calculation of different Q and R.Through the simulation calculation and selecting the appropriate weight matrix Q and R,the performance index is optimized.Simulation experiments show that the method is feasible and practical.Key words:linear quadratic;weighted matrix;optimal controller;MATLAB simulation(责任编辑:黎娅)。
两轮自平衡机器人的研究共3篇
两轮自平衡机器人的研究共3篇两轮自平衡机器人的研究1两轮自平衡机器人的研究近年来,随着人工智能技术的不断发展,机器人正逐渐成为人类生活中的重要组成部分。
而作为机器人中的一种,两轮自平衡机器人的研究也日趋成熟。
本文将对两轮自平衡机器人的研究现状、原理、应用等方面进行介绍。
一、两轮自平衡机器人的研究现状两轮自平衡机器人可以追溯到20世纪80年代,当时研究者Christopher C. H. Kwan在其博士论文中首次提出了实现两轮自平衡的方法。
随着控制技术、电机技术、计算机技术等方面的发展,两轮自平衡机器人的研究也越来越广泛。
目前,两轮自平衡机器人的研究主要涉及控制策略、动力学建模、轨迹规划等方面。
控制策略是两轮自平衡机器人研究中的核心问题,目前主要有PID控制、模糊控制、神经网络控制等方法。
其中,PID控制是最基本的控制方法之一,能够实现较好的稳定性和鲁棒性。
而模糊控制则可以处理非线性系统和模棱两可的问题,有较好的实用价值。
神经网络控制则是利用神经元之间相互连接的方式,模拟人类大脑进行控制,有很高的容错性和自适应性。
动力学建模是对机器人的运动学和动力学模型进行建立,可以为控制策略的设计提供基础。
在两轮自平衡机器人研究中,采用的动力学模型主要有倒立摆模型和悬挂模型。
倒立摆模型是将两轮机器人抽象成一个质点和一个竖直平衡的杆,通过对杆的转动来实现机器人的前后倾斜。
悬挂模型则是将两轮机器人视为一根绳子和一个质点,通过调整绳子的张力来实现机器人的前后倾斜。
轨迹规划主要是将机器人的控制信号转化成轨迹点的位置和速度,以确保机器人能够按照指定的轨迹进行运动。
在两轮自平衡机器人研究中,轨迹规划的方法主要包括PID控制目标规划、工具函数法、动态规划等。
二、两轮自平衡机器人的原理两轮自平衡机器人的原理主要基于倒立摆理论,即通过控制机器人前后倾斜的角度,使机器人能够保持平衡。
两轮自平衡机器人的结构一般包括电机、减速器、编码器、惯性测量单元等部件。
基于LQR控制的机器人自行车静态平衡研究

基于LQR控制的机器人自行车静态平衡研究【摘要】本研究基于LQR控制理论,探讨了机器人自行车静态平衡的控制方法。
首先介绍了LQR控制理论的基本原理,然后分析了机器人自行车静态平衡的原理,接着提出了基于LQR控制的控制方法。
通过仿真实验设计和结果分析,验证了该方法的有效性。
最后对控制效果进行评价与讨论,总结了研究成果。
未来的研究可以进一步优化控制算法,提高自行车静态平衡的精度和稳定性。
通过本研究,可以为机器人自行车的智能控制提供理论基础和实际应用参考。
【关键词】机器人, 自行车, 静态平衡, LQR控制, 控制理论, 仿真实验, 控制效果, 结论, 研究背景, 研究目的, 研究意义, 原理分析, 控制方法, 实验设计, 结果分析, 成果总结, 未来展望, 评价与讨论1. 引言1.1 研究背景自行车是一种常见的交通工具,对于很多人来说是一种便捷且环保的出行方式。
自行车在静止状态下需要保持平衡是一个挑战。
为了让机器人自行车在静态状态下保持平衡,传统的控制方法往往借助于PID控制器等方法,但是这些方法在一些复杂情况下效果不佳。
为了解决这一问题,近年来基于LQR控制的方法受到了研究者的关注。
LQR控制是一种基于最优控制理论的方法,通过对系统状态和控制输入进行加权组合,可以使系统在最小二乘意义下达到最优控制效果。
将LQR控制方法应用于机器人自行车静态平衡控制中,有望提高系统的稳定性和精确性。
本研究旨在利用LQR控制方法实现机器人自行车的静态平衡控制,并通过仿真实验和结果分析来验证其有效性。
通过研究机器人自行车静态平衡控制,可以为未来更复杂的机器人运动控制问题提供参考和借鉴。
本研究具有一定的理论和应用意义。
1.2 研究目的本文旨在探究基于LQR控制的机器人自行车静态平衡技术,通过理论分析和仿真实验,验证这种控制方法在实际应用中的可行性和有效性。
具体目的包括:1. 探究LQR控制理论在机器人自行车静态平衡控制中的应用,深入了解其原理和特点;2. 分析机器人自行车静态平衡的基本原理,揭示其实现的关键因素和机制;3. 提出基于LQR控制的自行车静态平衡控制方法,设计相应的控制算法和策略;4. 进行仿真实验,评估基于LQR控制的自行车静态平衡控制方法的性能和稳定性;5. 总结控制效果,讨论其在实际应用中的优势和局限性,为未来的研究和应用提供参考依据。
两轮机器人自平衡研究

XX,a click to unlimited possibilities
汇报人:XX
目录 /目录
01
点击此处添加 目录标题
04
两轮机器人自 平衡的关键技 术
02
两轮机器人自 平衡技术概述
05
两轮机器人自 平衡技术的挑 战与解决方案
03
两轮机器人自 平衡系统的组 成
06
两轮机器人自 平衡技术的未 来展望
健康护理:未来,两轮机器人自平衡技术还可能应用于健康护理领域,如老年人照料、 康复训练等。
对产业和社会的影响
添加标题
促进相关产业发展:两轮机器人自平衡技术的不断进步将带动相关产业 链的发展,如电池技术、传感器等。
添加标题
提高生产效率:两轮机器人自平衡技术能够提高生产效率,降低生产成 本,为企业创造更多价值。
两轮机器人自平衡技术的应用场景:从个人出行到物流运输,再到公共安全等领域,具有广 泛的应用前景。
03
两轮机器人自平衡系统 的组成
控制系统
组成:传感器、控制器和执行器 功能:检测机器人姿态,控制平衡和运动 控制算法:PID控制、模糊控制等 实现方式:硬件电路、嵌入式系统等
传感器系统
传感器作用:检测机器人姿 态、速度和位置等信息
06
两轮机器人自平衡技术 的未来展望
技术发展趋势
智能化:随着人工智能技术的不断发展,两轮机器人自平衡技术将更加智能化,能够更好地适 应复杂环境。
高效化:未来两轮机器人自平衡技术将更加注重效率,提高平衡稳定性和行驶速度。
多样化:随着应用场景的不断拓展,未来两轮机器人自平衡技术的种类将更加多样化,满足不 同领域的需求。
该技术的应用场 景包括但不限于 个人出行、物流 运输、公共交通 等领域,具有广 泛的市场前景和 实际应用价值。
两轮平衡机器人系统控制方法探究
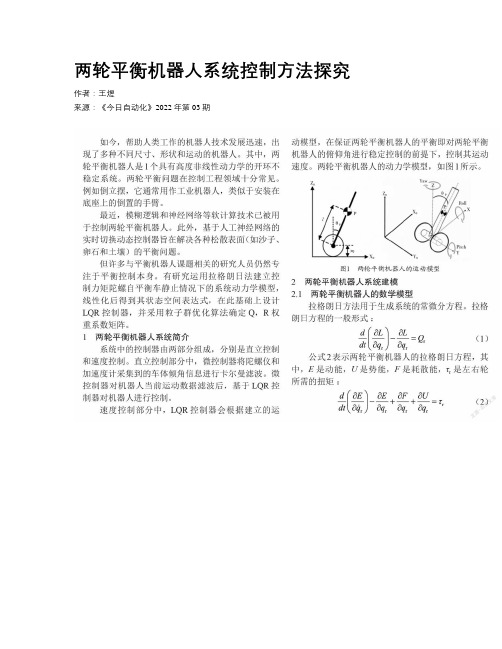
两轮平衡机器人系统控制方法探究作者:***来源:《今日自动化》2022年第03期[摘要]两轮平衡机器人的工作原理类似于倒立摆,控制器在自平衡和稳定中起着至关重要的作用。
文章介绍了一种两轮平衡机器人的设计。
文章的重点是使用线性二次调节器(LQR)控制器来控制两轮平衡机器人。
通过6轴传感器来进行互补滤波得到姿态信息,通过编码器得到机器人的速度信息。
两轮平衡机器人的控制采用LQR控制器,其中包含调节电机速度和旋转方向。
LQR控制建模基于线性运动方程,其中的运动学和电气参数通过实验确定。
实验结果表明,LQR控制器能够很好地将两轮机器人保持在平衡状态。
[关键词]两轮平衡机器人;LQR控制器;互补滤波[中图分类号]TP242 [文献标志码]A [文章编号]2095–6487(2022)03–00–03Research on Control Method of Two-Wheel Balancing Robot SystemWang Yu[Abstract]The working principle of a two-wheeled balancing robot is similar to an inverted pendulum, and the controller plays a crucial role in self-balancing and stability. This paper presents the design of a two-wheeled balancing robot. The focus of the article is the use of a Linear Quadratic Regulator (LQR) controller to control a two-wheeled balancing robot. The attitude information is obtained by complementary filtering through the 6-axis sensor, and the speed information of the robot is obtained through the encoder. The control of the two-wheeled balancing robot adopts the LQR controller, which includes adjusting the motor speed and rotation direction. The LQR control modeling is based on linear equations of motion, where the kinematics and electrical parameters are determined experimentally. The experimental results show that the LQR controller can keep the two-wheeled robot in a balanced state well.[Keywords]two-wheeled balancing robot; LQR controller; complementary filtering如今,幫助人类工作的机器人技术发展迅速,出现了多种不同尺寸、形状和运动的机器人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自平衡 两轮 移 动 机 器 人 是 一 种 类 似 于倒 立摆 的 轮 式 移 动 机 器 人 …, 垂 直 位 置 , 角 小 于41 。 , 近 似 为 线 性 系统 , 以 在 倾 -0 时 可 所 对 自平 衡 两 轮 移 动 机 器 人 的控 制 可 以 采 用 线 性 控 制 方 法 ] 由 。 于 该 机 器人 在控 制上 的复 杂 性 和技 术 实 现 上 的难 度 ,很 适 合 作 为 各 种 控 制 理论 和方 法 研 究 的 试 验 平 台 。 本 文设 计 的 自平 衡 两 轮 移 动 机 器 人 , 格 低 廉 , 部 自行 制 价 全
机 有 : 流 电 机 、 流元 刷 电 机 和 步 进 电机 , 着 设 计 成 本 低 , 直 直 ]本
作 , 以 进 行 各 种 创 新 性 实 验 , 有 很 好 的 理 论 研 究 价 值 , 是 可 具 也 个很 好 的 锻炼 动手 能 力 的平 台。 器 人 采 用 电 机 驱 动 , 般 由 机 一
模 的 合 理 有 效性 。
关 键词 : 自平 衡 机 器 人 , 学建 模 , 数 最优 控 制 器 , A L B仿 真 M TA
Ab tac sr t
T d PI 0F 11 he s C3 40 as he o to c p, e om e t c n r l hi t h h made tt e or en or, r s ope nd omemad moor i s ns s s sgy o c l a h e t en ode t c r o co po e t e m s h deecig y t m , ch ap wo— t t s s e t n he e t whe e sef eld l —bal cn an ig mobi r o s l ob t i desgn e i ed, qui s t o i t t ui t be e s an ex — per e t af r i n plto m o ar us onr l eh m fv i c to m todsAcc dig o t e obo pa a eer a d o i , oor o . or n t h r tS r m t s n m t m t mod , on el whe m o an el del d f war mo a e or d del r de i e dy m i l o a e sgn d, na ca m del r bula ob an h bal cn f war s sem sae pa e pr s in, i,nd t t i t e an ig or d y t S t t s ce x e so desgn t e QR tmalc tol r ge h xpe t baa ci r ut by i h L op i onr l , tt e e e ced ln ng es l s makn te i a i e er e t t MATL ig h smult on xp i n s wi m h AB. K wodss f al ci ob , a h m a ialm o ey r :el -b an ng r ot t e t del i n r l , ATL m c , malco tol M opt er AB Si ua in m lt o
格 低 廉 的 自平衡 两轮 移动 机 器人 , 适 合 作 为 各 种控 制 方 法 的研 究 平 台 。根 据 机 器人 的 系统 参 数 和 运 动 状 态 , 计 了电机 很 设
模 型 、 轮 模 型 及 车 身前 进 模 型 , 建 了 系统 的动 力 学模 型 , 到 了机 器人 平衡 前进 时 的 状 态 空 间表 达 式 , 计 了 L 车 构 得 设 QR 最 优 控 制 器 , 进 行 了 MA L B仿 真 , 到 了预 期 的 平衡 效 果 , 证 了 系统 具 有 良好 的 鲁 棒 性 , 时 表 明硬 件 设 计 和 系统 建 并 TA 得 验 同
动 电路 、 控 器 电路 、 一 接 口 电路 和 电 源 供 电 电路 。 图 1 遥 人 机 是
系 统 的构 成 图 。 2 自平 衡 两 轮 移 动 机 器 人 的动 力学 模 型
21 直 流 电 机模 型 . 由于 系 统 所 采 用 的 是 可 充 电 电 池 供 电 , 因而 可 供 选 择 的 电
一
对 控 制 器 要 求 不 高 的 原 则 , 用 直 流 电机 。 流 电 机 具 有 良好 的 选 直 控 制 性 能 、 大 的起 动 转 矩 以及 反 应 灵 敏 等优 点 , 根 据 输 入 电 较 它
枢 电压 大 小 输 出转 速 与 转矩 。 电机 转速 不 高 时 , 以 忽 略 电枢 电 可 感 L 粘 性 阻 尼 系数 B, 得 直 流 电 机 输 出 的 电 枢 电压 u 、 , 可 电机
《 业 控 制计 算机 }0 2年第 2 工 21 5卷 第 6期
自平衡两轮移动机器人的 L QR控制策略研究
R s a c f T —wh ee ef a a cn b l b t QR Co t lSt t g e e r h o wo e ld S l -b ln ig Mo i Ro o L nr r e y e S o a
杨 慧 王 富 东 ( 苏州大学机电工程 学院, 江苏 苏州 2 5 2 ) 1 0 1
摘 要
采 用 ds C3 F 01 PI 0 4 1作 为 主 控 芯 片 , 用 自制 倾 角传 感 器 、 利 陀螺 仪 和 自制 的 电 机 编 码 器 作 为 系统 的 传 感 器 , 计 了价 设