北京科大智能车技术报告
【第五届智能车技术报告】北京科技大学-光电一队技术文档解读
第五届全国大学生“飞思卡尔”杯智能汽车竞赛技术报告学校:北京科技大学队伍名称:北京科技大学光电一队参赛队员:郭心尘黄丽雅徐佩林带队教师:张文明杨珏关于技术报告和研究论文使用授权的说明本人完全了解第五届“飞思卡尔”杯全国大学生智能汽车邀请赛关于保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:I目录引言 .................................................................................................................................. 1第一章方案设计 . ...................................................................................................................3 1.1系统总体方案的选定 . ...............................................................................................3 1.2系统总体方案的设计 . ...............................................................................................3 1.3 小结 . ........................................................................................................................... 5第二章智能汽车机械结构调整与优化 .............................................................................. 7 2.1智能汽车车体机械建模 ........................................................................................... 7 2.2 智能汽车前轮定位的调整 ...................................................................................... 8 2.2.1主销后倾角 . ..................................................................................................... 8 2.2.2 主销内倾角 . .................................................................................................... 8 2.2.3 车轮外倾角 . .................................................................................................... 9 2.2.4 前轮约束 . ........................................................................................................ 9 2.3 智能汽车部分结构安装及改造 ............................................................................ 10 2.3.1 智能汽车转向机构调整优化 ...................................................................... 10 2.3.2 智能汽车电机与中间齿轮箱调整 ............................................................. 12 2.3.3 轮胎的选用 . .................................................................................................. 13 2.4 其他机械结构的调整 . ............................................................................................ 14 2.5 小结 . ......................................................................................................................... 15第三章智能汽车硬件电路设计 . . (17)3.1主控板设计 (17)3.1.1电源管理模块 ............................................................................................... 17 3.1.2 电机驱动模块 ............................................................................................... 18 3.1.3 接口模块 . (20)III3.1.4 主控板设计 . (22)3.2智能汽车传感器模块设计 (22)3.2.1 光电传感器原理 .......................................................................................... 22 3.2.2 激光传感器的设计 ...................................................................................... 23 3.2.3加速度传感器的应用 ................................................................................... 24 3.3 舵机的测试和调试 . ................................................................................................ 24 3.4 小结 . ......................................................................................................................... 25第四章智能汽车控制软件设计 . . (27)4.1光电传感器路径精确识别技术 (27)4.1.1光电传感器路径识别状态分析 .................................................................. 27 4.1.2 光电传感器路径识别算法 . ......................................................................... 28 4.2 弯道策略分析 ......................................................................................................... 30 4.3 弯道策略制定 ......................................................................................................... 32 4.4 小结 . ......................................................................................................................... 33第五章开发工具、制作、安装、调试过程 . . (35)5.1 开发工具 (35)5.2 调试过程 (35)第六章模型车主要参数 .....................................................................................................37 6.1 智能汽车外形参数 . ................................................................................................37 6.2 智能汽车技术参数 . ................................................................................................ 37结论 ................................................................................................................................ 39参考文献 .......................................................................................................................... 41致谢 (43)IV引言全国大学生“飞思卡尔”杯智能汽车竞赛是以“立足培养、重在参与、鼓励探索、追求卓越”为宗旨,鼓励创新的一项科技竞赛活动。
第六届飞思卡尔北京科技大学-电磁二队技术报告
参赛队员签名: 带队教师签名: 日期:
引言
这份技术报告中,我们小组通过对小车设计制作整体思路、电路、算法、 调试、车辆参数的介绍,详尽地阐述了我们的思想和创意,具体表现在电路的 创新设计,以及算法方面的独特想法,而对单片机具体参数的调试也让我们付 出了艰辛的劳动。这份报告凝聚着我们的心血和智慧,是我们共同努力后的成 果。 在准备比赛的过程中,我们小组成员涉猎控制、模式识别、传感技术、汽 车电子、电气、计算机、机械等多个学科,这次磨练对我们的知识融合和实践 动手能力的培养有极大的推动作用,在此要感谢清华大学,感谢他们将这项很 有意义的科技竞赛引入中国;也感谢北京科技大学相关学院对此次比赛的关注, 我们的成果离不开学校的大力支持及指导老师悉心的教导;还要感谢的是和我 们一起协作的队员们,协助,互促,共勉使我们能够走到今天。
-1-
第六届全国大学生智能汽车邀请赛技术报告
目录
引言 ...................................................................................................... - 1 目录 ...................................................................................................... - 2 第一章方案设计 .................................................................................... - 5 1.1 系统总体方案的设计 ........................................................................ - 5 1.2 系统总体方案设计图 ........................................................................ - 6 第二章智能车机械结构调整与优化 ........................................................ - 7 2.1 智能车车体机械建模 ........................................................................ - 7 2.2 智能车前轮定位的调整 .................................................................... - 8 2.2.1 主销后倾角 ............................................................................ - 8 2.2.2 主销内倾角 ............................................................................ - 8 2.2.3 车轮外倾角 ............................................................................ - 9 2.2.4 前轮前束 ................................................................................ - 9 2.3 智能车转向机构调整优化 .............................................................. - 10 2.4 智能车后轮减速齿轮机构调整 ...................................................... - 11 2.5 其它机械结构的调整 ...................................................................... - 12 第三章电路设计说明 ........................................................................... - 13 3.1 主控板和驱动板的硬件设计 ......................................................... - 13 3.1.1 电源管理模块 ...................................................................... - 13 3.1.2 电机驱动模块 ...................................................................... - 14 3.1.3 数模转换模块 ...................................................................... - 14 3.1.4 单片机及其他电路部分设计 .............................................. - 15 -2-
全国大学生智能汽车竞赛技术报告
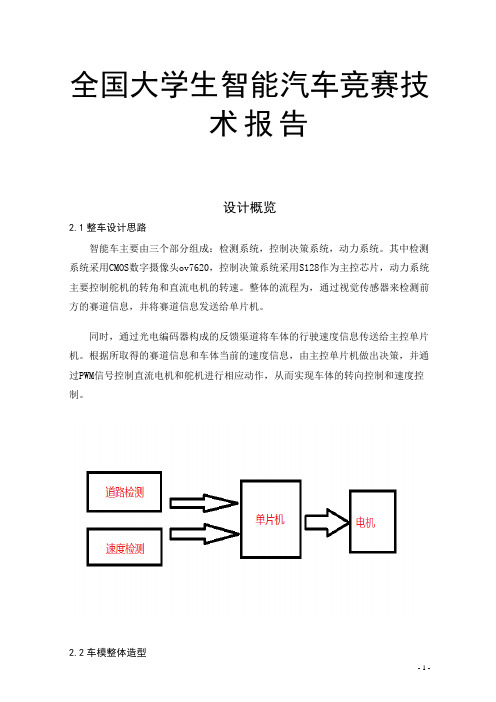
全国大学生智能汽车竞赛技术报告设计概览2.1整车设计思路智能车主要由三个部分组成:检测系统,控制决策系统,动力系统。
其中检测系统采用CMOS数字摄像头ov7620,控制决策系统采用S128作为主控芯片,动力系统主要控制舵机的转角和直流电机的转速。
整体的流程为,通过视觉传感器来检测前方的赛道信息,并将赛道信息发送给单片机。
同时,通过光电编码器构成的反馈渠道将车体的行驶速度信息传送给主控单片机。
根据所取得的赛道信息和车体当前的速度信息,由主控单片机做出决策,并通过PWM信号控制直流电机和舵机进行相应动作,从而实现车体的转向控制和速度控制。
2.2车模整体造型我们车模的整体设计简洁,轻便,可靠美观。
如下图:2.3智能车软件设计系统硬件对于赛车来说是最基础的部分,软件算法则是赛车的核心部分。
首先,赛车系统通过图像采样处理模块获取前方赛道的图像数据,同时通过速度传感器模块实时获取赛车的速度。
然后S128利用边缘检测方法从图像数据中提取赛道黑线,求得赛车于黑线位置的偏差,接着采用PID 方法对舵机进行反馈控制,并在PID算法的基础上,整合加入模糊控制算法,有利于对小车系统的非线性特性因素的控制。
最终赛车根据检测到的速度,结合我们的速度控制策略,对赛车速度不断进行恰当的控制调整,使赛车在符合比赛规则情况下沿赛道快速前进。
第三章小车的机械设计良好的机械结构将直接影响小车的结构稳定,和车模的高速时的性能。
模型车的机械机构和组装形式是整个模型车身的基础,机械结构的好坏对智能车的运行速度有直接的影响。
经过大量的实验经验可以看出,机械结构决定了智能车的上限速度,而软件算法的优化则是使车速不断接近这个上线速度,软件算法只有在精细的机械结构上才能够更好的提高智能车的整体性能。
3.1 舵机安装舵机转向是整个控制系统中延迟较大的一个环节,为了减小此时间常数,通过改变舵机的安装位置,降低舵机的中心,将舵机的安装尽量低,而并非改变舵机本身结构的方法可以提高舵机的响应速度。
智能车光电组-北京工业大学技术报告
第七届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:北京工业大学队伍名称:G-Tank参赛队员:郭靖波王智一梁迪带队教师:贾惠忠关于技术报告和研究论文使用授权的说明本人完全了解第七届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:郭靖波王智一梁迪带队教师签名:贾惠忠日期:2012-8-4摘要本文主要介绍了智能汽车控制系统的软硬件设计及开发过程。
整个系统涉及车模机械结构调整、硬件电路设计、赛道检测、控制算法等多个方面。
车模以MC9S12XS128单片机为控制核心,以激光管作为传感器检测赛道,以对传感器的随动控制作为核心控制算法。
正文分别从机械调整、电路设计和软件调试三个部分对智能汽车的整个制作过程进行了详细的介绍,其中包括了对设计方案选择、参数选取与调整、理论原理分析、技术的改进与创新等方面的内容。
经实际场地测试,本车模可以很好的适应大小“S”弯、“十字”交叉、小回环、大回环和坡道等不同的赛道类型以及不同类型赛道的不同组合,平均速度可达到2.5m/s,最大速度可达3m/s。
本车模主要特点在于路径的选择,对于长距离、复合型跑道更有优势。
关键字freescale智能车激光循迹随动控制路径选择目录摘要 (I)目录 .............................................................................................................................. I I 第一章引言 .. (1)1.1 综述 (1)1.2 系统主要结构思想 (1)1.3 特色与创新 (2)1.3.1 激光布局 (2)1.3.2 路径选择 (2)1.3.3 测试手段 (2)1.4 关联文献综述 (2)第二章机械 (3)2.1 概述 (3)2.2 悬挂改装 (3)2.3 舵机安装及连杆设计 (4)2.3.1 舵机安装 (4)2.3.2 舵机臂及舵机连杆 (5)2.4 前轮定位 (6)2.4.1 理论分析 (6)2.4.2 实际调整 (7)2.5 传感器的安装 (7)2.6 底盘高度和重心 (8)第三章硬件 (9)3.1 概述 (9)3.2 核心板 (9)3.3 传感器 (10)3.3.1 传感器选择 (10)3.3.2 排布方案 (12)3.3.3 驱动电路 (15)3.4 驱动 (16)3.5 测速 (18)3.6 人机交互 (18)3.7 电源分配 (19)第四章软件调试 (21)4.1 程序总框图 (21)4.2 循迹策略 (21)4.3 转向舵机控制算法 (22)4.4 速度控制算法 (23)4.5 弯道策略 (24)4.6 十字线策略 (25)4.7 调试工具和方法 (26)第五章开发制作与调试 (29)5.1 系统开发工具 (29)5.2 调试过程 (29)5.2.1 硬件调试 (29)5.2.2 软件调试 (30)第六章结论 (31)6.1 模型汽车制作概述与技术指标 (31)6.1.1 车模最终可达到的速度 (31)6.1.2 车模主要技术参数 (31)6.2 智能车最终实物图 (31)6.3 总结 (32)致谢 (33)参考文献 (34)附录A G-Tank智能车C语言源代码 (I)第一章引言1.1 综述全国大学生飞思卡尔智能汽车竞赛是由教育部高等自动化专业教学指导分委员会主办,以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,是以智能汽车为竞赛平台的多学科专业交叉的创意性科技竞赛,是面向全国大学生的一种具有探索性的工程实践活动,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神。
科大智能财务报告分析(3篇)

第1篇一、引言随着我国经济社会的快速发展,企业财务管理的重要性日益凸显。
科大智能作为一家专注于智能装备、工业自动化和工业互联网的高新技术企业,其财务状况直接关系到企业的可持续发展。
本文将对科大智能的财务报告进行深入分析,旨在揭示其财务状况、经营成果和未来发展潜力。
二、财务报表概述1. 资产负债表分析根据科大智能的资产负债表,我们可以看到以下关键数据:- 资产总额:截至2022年末,科大智能资产总额为XX亿元,较上年同期增长XX%。
- 负债总额:截至2022年末,科大智能负债总额为XX亿元,较上年同期增长XX%。
- 所有者权益:截至2022年末,科大智能所有者权益为XX亿元,较上年同期增长XX%。
通过对比分析,我们可以看出,科大智能的资产总额和所有者权益均呈增长趋势,表明企业规模不断扩大。
但同时,负债总额也呈现增长,需要进一步分析其负债结构和负债原因。
2. 利润表分析从利润表来看,科大智能的主要财务指标如下:- 营业收入:2022年,科大智能营业收入为XX亿元,较上年同期增长XX%。
- 营业成本:2022年,科大智能营业成本为XX亿元,较上年同期增长XX%。
- 净利润:2022年,科大智能净利润为XX亿元,较上年同期增长XX%。
通过分析,我们可以看出,科大智能营业收入和净利润均呈增长趋势,表明企业经营状况良好。
但需要注意的是,营业成本的增长速度高于营业收入,导致毛利率有所下降。
3. 现金流量表分析现金流量表反映了企业现金流入和流出的情况,以下是科大智能现金流量表的关键数据:- 经营活动现金流量:2022年,科大智能经营活动现金流量为XX亿元,较上年同期增长XX%。
- 投资活动现金流量:2022年,科大智能投资活动现金流量为XX亿元,较上年同期增长XX%。
- 筹资活动现金流量:2022年,科大智能筹资活动现金流量为XX亿元,较上年同期增长XX%。
从现金流量表可以看出,科大智能经营活动现金流量和投资活动现金流量均呈增长趋势,表明企业经营活动和投资活动较为稳健。
北科大智能车分析

图片展示的是车辆尾部以及车辆的中部。
我们可以观察的几个特点。
(1)此车采用了双测速,车尾用测速轮电机旁边还有小型的旋转编码器(应该是80线的吧)。
(2)在车尾部的上方,有一块芯片,当时记得看见上面的数字写的05969(貌似是)。
尚未查到该芯片的准确作用,起初以为是用来接码盘的,后来发现码盘没有接在该芯片上面。
我估计应该是一个重力传感器吧。
不然的话没有必要用那么多螺丝固定,并且放在车尾这样的位置也是很诡异的。
为了检测是不是甩尾??那这也太恐怖了,等着高人解析啊。
(3)车辆的避震结构完全被拆除,取而代之的是在车辆的后桥下面加了一层铝合金板(应该是这种材料吧)。
从加工的车度来看,应该是车床做出来的吧。
我认为铝合金板即起到了安装后测速轮的作用,又加固了底盘。
这个方法很巧妙,很多学校大多数都是对底盘进行了整体加固,但其实真正脆弱的只是前桥和后桥。
这样的加固方法,效果好而且也减轻了重量。
车辆的后悬挂支撑也由该铝合金板负责。
精度应该会比塑料件好。
(4)传动轴为蓝色,可以认定为是较早的一批车模。
现在的都是白色的。
(5)电路板的第一层为按键,按键为4*4(好像是)。
起初认为按键不需要那么多,但是真正比赛时候,调参数的时间很有限。
如果能用全数字键盘输入的话,会省事的多,挤出更多的时间试车。
(6)与差速器和电机相连的齿轮,貌似用了滚珠轴承,因为怎么看怎么觉得那里比较怪异。
这是北科光电车的正视图,希望高手们继续发挥你们的特长,来点评一下它的特点。
以下是我的一些看法和分析。
(1)首先最显著的特征是舵机的安装方法,这样放在车头上的竖装舵机,是今年很多强队不约而同采用的安装方法。
但是北科的安装方法,是和它前桥整体改造放在一起的。
原来的前束和一些连杆的位置都发生很大的改变。
前面保留的只是原来的传动结构。
前桥的结构和后桥的也是一样,也去掉了减震的部分。
而重新采用四个螺丝作为调整底盘高度的依据。
从舵机与车轮的链接杆来看,应该是去年车模上用的连接杆(今年车模没有这么长的)。
第四届飞思卡尔杯智能车大赛技术报告 北京工商大学

摘要随着数字图像处理技术的发展,面阵CCD摄像头在自动控制领域得到了越来越广泛的应用。
本文在对CCD图像处理技术和单片机嵌入式应用进行深入研究的基础上,借鉴国内外先进技术,研制出了具有自动循迹,转弯,加减速功能的智能小车。
本文介绍了基于面阵CCD图像处理技术以及MC9S12DG128微控制器嵌入式技术的智能小车的设计原理及研制过程。
论述了智能小车自动控制系统的实现方法,着重讨论了智能小车的硬件设计和以Codewarrior C交叉编译器为开发工具的软件设计。
在智能小车的研制过程中,利用CCD摄像头采集到的图像存在杂点和误差,这对单片机的控制影响较大,因此需要运用图像处理技术对数字图像进行处理,以达到对黑线正确识别的目的。
关键词:智能小车; CCD; MC9S12DG128微控制器;图像处理AbstractWith the development of treatment technology of the digital picture , plane array CCD camera has got more and more extensive application on the automatic controlled field.This text is on the basis of the thing that use and further investigate to CCD image processing technology and single-chip computer embeddedly, learns from domestic and international advanced technology, develop and follow the mark automatically, turn, add the intelligent car which moderates the function. The introduction to this text is on the basis of plane array CCD image processing technology and the design principle of the intellectual car of MC9S12DG128 microcontroller embedded technology and research course. Havedescribed the implementation method of the automatic control system of intellectual car , have discussed emphatically the hardware of the intellectual car is designed and as the software design of the developing instrument with Code-warrior C compiling device alternately.In the course of research of the intelligent car , utilize the picture that CCD camera gathers to noise and error, this makes a great influence on control of the single-chip computer, so need to use the image processing technology to deal with the digital picture , in order to achieve the correct purpose that discerns to the black line.Keywords:Intelligent car ; CCD ; MC9S12DG128microcontroller ;Image processing目录1.1背景简介 (1)1.2本课题研究的目的及意义 (2)1.3国内外相关技术的发展现状 (3)1.3.1国外智能小车的发展状况 (3)1.3.2国内智能小车的发展状况 (4)1.4系统设计要求 (5)1.5智能小车的设计思路 (5)1.6本文主要研究内容 (6)1.7本文的篇章结构 (7)2.1路径识别方案设计论证 (7)2.1.1 方案一:基于光电传感器阵列的路径识别方案 (7)2.1.2 方案二:基于线阵CCD图像传感器的路径识别方案 (8)2.1.3 方案三:基于面阵CCD图像传感器的路径识别方案 (8)2.1.4 所选方案 (8)2.2面阵CCD图像传感器简介 (8)2.3面阵CCD图像传感器的工作原理 (9)2.4面阵CCD图像传感器的选择 (10)2.5图像处理方法 (10)2.5.1 图像处理技术基础 (11)2.5.2 图像的灰度变换 (11)2.5.3 图像的平滑处理 (11)2.5.4 图像边缘检测 (12)2.6本章小结 (13)3.1机械方面设计及改进 (13)3.1.1 车模基本参数 (13)3.1.2 CCD摄像头的设计安装 (14)3.1.3 底盘参数设计改进 (14)3.1.4 齿轮传动机构调整 (15)3.1.5 后轮差速机构调整 (15)3.1.6驱动电机介绍 (16)3.1.7 舵机介绍 (17)3.2智能小车电路设计 (19)3.2.1 所选用单片机介绍 (19)3.2.2 硬件电路系统组成 (22)3.2.3 供电电路 (23)3.2.4 时钟电路 (24)3.2.5看门狗电路 (25)3.2.6 电源稳压电路 (25)3.2.7 驱动电机/舵机电路 (26)3.2.8 CCD摄像头数据采集分离电路 (27)3.2.9 A/D采集电路设计 (28)3.3本章小结 (29)4.1软件设计环境 (30)4.2软件整体设计方案 (30)4.3程序评测及流程 (31)4.4程序模块介绍 (34)4.4.1 初始化 (34)4.4.2 摄像头图像数据采集以及处理 (35)4.4.3 速度采集以及速度控制 (42)4.5黑线提取算法 (42)4.6本章小结 (42)5.1软件开发平台C ODEWARRIOR IDE (43)5.1.1 Codewarrior IDE 功能介绍 (43)5.1.2 Codewarrior IDE 基本使用方法 (44)5.2本章小结 (48)第1章绪论1.1背景简介车辆与我们的社会生活息息相关,然而当今车辆的智能化发展还不是很迅速,特别是在安全性,智能化,车与路之间交互信息等方面。
智能小车技术报告_王艺文师
第三届“飞思卡尔”杯全国大学生智能汽车邀请赛技 术 报 告附录A: 源程序代码附录B: 电路原理图及接口说明图附录C: Codewarriar4.6 使用简介队伍名称: Bumble Bee参赛队员:王艺文胡柏毓吴山甘红星指导教师:杨旭东邝坚目 录第一章引言 (4)1.1背景介绍 (4)1.2文献综述 (5)1.3文本结构 (5)第二章系统分析与设计 (7)2.1 总体需求分析 (7)2.2 系统设计方案论证 (7)2.3 本章小结 (8)第三章机械系统设计与实现 (9)3.1 车模安装与改造 (9)3.1.1 车模安装 (9)3.1.2 驱动模块 (9)3.1.3 舵机模块 (10)3.1.4 其他模块 (10)3.2 电路板安装 (11)3.3 传感器安装 (12)3.3.1摄像头安装 (12)3.3.2速度传感器安装 (12)3.4 本章小结 (13)第四章硬件系统设计与实现 (14)4.1 整体电路板设计 (14)4.1.1 硬件需求分析 (14)4.1.2 控制模块介绍 (14)4.1.3 电路板制作 (15)4.2 摄像头 (16)4.2.1工作原理 (16)4.2.2 摄像头选择 (17)4.2.3 电路设计 (18)4.2.4 数据提取 (19)4.3 速度传感器 (22)4.3.1 方案选择 (22)4.3.2 软件编程 (22)4.3.3 速度闭环控制 (23)4.4 本章小结 (24)第五章软件系统设计与实现 (25)5.1 需求分析 (25)5.2 系统设计 (26)5.2.1 时钟模块 (26)5.2.2 PWM模块 (26)5.2.3 ECT模块 (27)5.2.4 AD模块 (28)5.2.5 串口模块 (29)5.2.6 普通IO (29)5.3 黑线提取算法 (30)5.3.1 二值化算法 (30)5.3.2 直接边缘检测算法 (31)5.3.3 跟踪边缘算法 (31)5.4 车体控制算法 (32)5.4.1 PID算法 (32)5.4.2 模糊控制算法 (32)5.4.3 记忆算法 (34)5.5 本章小结 (35)第六章系统调试 (37)6.1 开发调试工具 (37)6.1.1 软件开发平台 (37)6.1.2 手动设置装置 (38)6.1.3 状态指示单元 (38)6.2 具体调试分析 (38)6.2.1 摄像头角度与高度的分析 (39)6.2.2 PID算法调试 (39)6.2.3 模糊控制算法 (39)6.3 本章小结 (41)第七章总结与展望 (42)7.1 赛车整体总结 (42)7.1.1 赛车制作过程 (42)7.1.2 制作过程中问题及解决方法 (42)7.1.3 不足 (43)7.2 展望 (43)鸣 谢 (45)参 考 文 献 (46)附录A源程序代码 (47)附录B电路原理图及接口说明图 (57)附录C Codewarriar4.6 使用简介 (60)第一章引言1.1背景介绍受教育部高等教育司委托,高等学校自动化专业教学指导委员会负责主办全国大学生智能车竞赛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:北京科技大学队伍名称:科大中冶队参赛队员:严林甘男练丁榑带队教师:张文明引言 关于技术报告和研究论文使用授权的说明本人完全了解第四届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:引言这份技术报告中,我们通过对整体方案、电路、算法、调试、车辆参数的介绍,详尽地阐述了我们的思想和创意,具体表现在电路的创新设计,以及算法方面的独特想法,而对单片机具体参数的调试也让我们付出了艰辛的劳动。
这份报告凝聚着我们的心血和智慧,是我们共同努力后的成果。
在准备比赛的过程中,我们的队员涉猎控制、模式识别、传感技术、汽车电子、电气、计算机、机械等多个学科,这次磨练对我们的知识融合和实践动手能力的培养有极大的推动作用,在此要感谢清华大学,感谢他们将这项很有意义的科技竞赛引入中国;也感谢北京科技大学相关单位对此次比赛的关注,我们的成果离不开学校的大力支持及指导老师悉心的教导;还要感谢的是和我们一起协作的队员们,协助,互促,共勉使我们能够走到今天。
目录引言.............................................................................................................. - 1 -目录.............................................................................................................. - 2 -第一章、方案设计 ........................................................................................ - 1 -1.1系统总体方案的选定 ................................................................................. - 1 -1.2系统总体方案的设计 ................................................................................. - 1 -第二章、智能车机械结构调整与优化............................................................ - 3 -2.1智能车车体机械建模 ................................................................................. - 3 -2.2智能车前轮定位的调整 ............................................................................. - 4 -2.2.1主销后倾角 ...................................................................................... - 4 -2.2.2主销内倾角 ...................................................................................... - 4 -2.2.3车轮外倾角 ...................................................................................... - 4 -2.2.4 前轮前束 ......................................................................................... - 4 -2.3智能车转向机构调整优化 ......................................................................... - 5 -2.4智能车后轮减速齿轮机构调整 ................................................................. - 7 -2.5轮胎的选用 ................................................................................................. - 8 -2.6其它机械结构的调整 ................................................................................. - 9 -第三章、电路设计说明 ................................................................................. - 11 -3.1 主控板的设计 .......................................................................................... - 11 -3.1.1 电源管理模块 ............................................................................... - 11 -3.1.2 电机驱动模块 ............................................................................... - 11 -3.1.3 主控板设计 ................................................................................... - 14 -3.1.4 传感器接口模块 ........................................................................... - 15 -3.2 智能车传感器模块设计 .......................................................................... - 15 -3.2.1光电传感器的原理 ........................................................................ - 15 -3.2.2 激光传感器的设计 ....................................................................... - 15 -第四章、智能车控制软件设计说明 ............................................................. - 17 -4.1光感器的路径精确识别技术 ................................................................... - 17 -4.1.1 光电传感器路径识别状态分析 ................................................... - 17 -4.1.2 光电传感器路径识别算法 ........................................................... - 19 -4.2弯道策略分析 ........................................................................................... - 20 -4.3弯道策略制定 ........................................................................................... - 21 -第五章、开发工具、制作、安装、调试过程说明........................................ - 23 -5.1 开发工具 .................................................................................................. - 23 -5.2 调试过程 .................................................................................................. - 23 -5.3 上位机监控 .............................................................................................. - 24 -第六章、模型车的主要技术参数说明.......................................................... - 26 -6.1 智能车外形参数 ...................................................................................... - 26 -6.2 电路部分参数 .......................................................................................... - 26 -6.3 除了车模原有的驱动电机、舵机之外伺服电机数量 .......................... - 26 -结论............................................................................................................ - 27 -参考文献 .................................................................................................... - 28 -第一章、方案设计本章主要简要地介绍智能车系统总体方案的选定和总体设计思路,在后面的章节中将整个系统分为机械结构、控制模块、控制算法等三部分对智能车控制系统进行深入的介绍分析。