第六章 电力系统自动低频减载装置 《电力系统自动装置(第2版)》教学课件
合集下载
第六章 电力系统自动低频减载及其他安全自动装置

四、自动低频减载的工作原理
装置的动作顺序
B
最大功率缺额 的确定
A 自动低频减载
C 频率级差的选
择
后备级的考虑
E
D 每级切除负荷
量限制
四、自动低频减载的工作原理
“轮” :计算点 f1、f2⋯ ⋯ fn 点1:系统发生了大量的有功功率缺额 点2:频率下降到 f1,第一轮继电器起动,经 一定时间 Δt1 点3:断开一部分用户,这就是第一次对功率 缺额进行的计算。 点3-4:如果功率缺额比较大,第一次计算不 能求到系统有功功率缺额的数值,那么频 率还会继续下降,很显然由于切除了一部 分负荷,功率缺额已经减小,所有频率将 按3-4的曲线而不是3-3'曲线继续下降。
二、电力系统频率的静态特性
功率缺额值。 P h
1 f Ph KL
K L 通常以标幺值表示:
50 Ph Ph % f K L* PLN 2 K L*
PLN 额定工况下的有功负荷。
例 电力系统在某一运行方式时,运行机组的总额定 容量为450MW,此时系统中的负荷功率为430MW ,负荷调节效应为KL*=1.5,设这时发生事故,突 然切除额定容量为100MW的发电机组,如不采取 任何措施,求事故情况下的稳态频率。 解:当时系统的热备用为 20MW, 所以实际功率缺额 为80MW,将有关数据代入上式得:
1 f Ph KL
可得
Ph max PL max K L* f * PLN PL max
PL max
Ph max K L* PLN f* 1 K L* f *
六、各轮动作功率的选择
1)第一级动作频率 f1 一般的一级启动频率整定在 48.5~49Hz。 2)最后一轮的动作频率 fn 自动减负荷装置最后一轮的动作频率最好不低于 46 ~ 46.5Hz。 3)前后两级动作的时间间隔 前后两级动作的时间间隔是受频率测量元件的动作误差 和开关固有跳闸时间限制的。 4)频率级差
电力系统自动装置低频减载
1 f K L Ph
系统功率缺额 负荷的频率调节特性
f 50 Ph K L* PLN
系统功率缺额
2020/5/12
9/37
2、电力系统频率的动态特性
B系统
i
PAi
PBi
Uii
在系统稳态运行情况下
A系统 ui U mi sinit i
全电网统一的角频率
•当系统受到微小扰动时,系统频率仍然维持 f X ,PAi PBi 发生
解决办法:针对引发系统性事故的紧急操作任务必须依靠
自动控制系统装置来完成。
电磁暂态
Electromagnetic Switching Transient
暂态稳定
Transient stability(angle and voltage) 小扰动稳定
系统运行 Power system operation
第六章 电力系统自动低频减 载及其他安全控制装置
主要内容
电力系统典型事故 自动低频减载
频率的静态/动态特性 自动低频减载的工作原理
最大功率缺额/动作顺序/频率级差选择 每段切功率的限制/延时与防止误动作特殊轮
自动低频减载装置
其他安全自动控制装置 自动解列装置 水轮机低频自启动装置 自动切机与电气制动
变化, i 也发生变化。此时,母线电压的瞬时角频率为
i
d dt
X
t
i
X
d i
dt
X
i
fi f X fi
•由于在扰动过程中,各母线电压的相角不可能具有相同的变化
率,因此,系统中各母线电压频率变化并一致。 变化情况。
f
i
取决于
i
的
2020/5/12
第六章 电力系统自动低频减载及其他安全自动控制装置

7
§6-2 自动低频减载
p发生频率崩溃现象
当 f↓→ 47~48Hz时,火电厂的厂用机械 (如给水泵等 )的出力将显著 ↓,→锅炉出力↓,导致发电厂发电功率进一步↓,致使功率缺额 更为严重。于是系统 f 进一步↓,这样恶性循环将使发电厂运行受 到破坏,从而造成所谓 “ 频率崩溃 ” 现象。
p对汽轮机的影响
l
Ø Ø Ø Ø
本章重要内容
电力系统安全自动控制装置的意义 ; 低频运行对电力系统运行的影响; 电力系统频率的静态和动态特性; 自动低频减载的工作原理;
2
第六章 电力系统自动低频减载及其他安全自 动控制装置
n
n
n
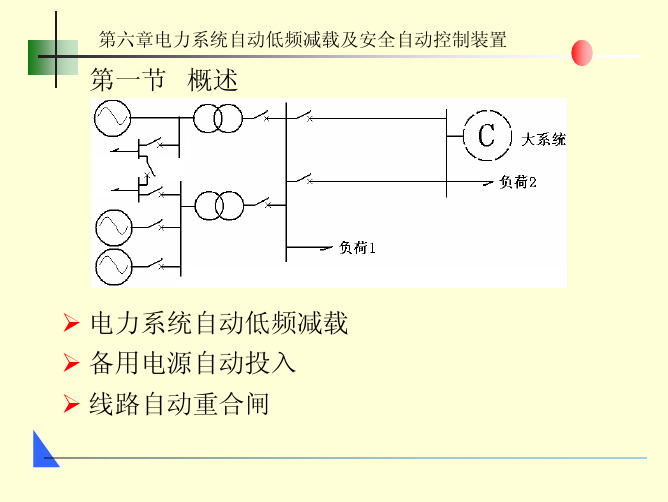
随着电力工业的迅速发展,电力系统的规模日益增大。运 行经验表明 大系统事故将使国民经济蒙受巨大损失,给人 民生活造成 极大困难 。例如 1965年 11月 9日美国电力系统 事故大约 20万 km2 的区域停电 13 h 以上,停电负荷达 2500 万 kW。 所以,对于系统性事故采取有效对策,以提高电 力系统运行的可靠性具有特别重要的实际意义。 当电力系统发生某些故障时,如不及时采取措施,就有可 能引起连锁反应,使事故扩大,以致危及整个系统的安全 运行。 本章所介绍的电力系统中常见的几种自动装置就是针对危 及系统安全运行的故障所采用的自动化对策,它们的主要 任务是,当系统发生某些故障时,按照预定的控制准则迅 速作出反应,采取必要措施避免事故扩大。
运行经验表明,某些汽轮机长时期在 f < 49~49.5Hz以下运行时,叶 片容易产生裂纹,当 f ↓→ 45Hz附近时,个别级的叶片可能发生共 振而引起断裂事故。
p发生电压崩溃现象
当 f↓时,励磁机、发电机等的 n相应↓,由于发电机的电动势↓和 电动机 n↓,加剧了系统无功不足情况,使系统电压水平↓。运行 经验表明,当 f ↓→ 46~45Hz时,系统电压水平受到严重影响,当 某些中枢点电压低于某一临界值时,将出现所谓 “ 电压崩溃 ” 现象, 系统运行的稳定性遭到破坏,最后导致系统瓦解。
§6-2 自动低频减载
p发生频率崩溃现象
当 f↓→ 47~48Hz时,火电厂的厂用机械 (如给水泵等 )的出力将显著 ↓,→锅炉出力↓,导致发电厂发电功率进一步↓,致使功率缺额 更为严重。于是系统 f 进一步↓,这样恶性循环将使发电厂运行受 到破坏,从而造成所谓 “ 频率崩溃 ” 现象。
p对汽轮机的影响
l
Ø Ø Ø Ø
本章重要内容
电力系统安全自动控制装置的意义 ; 低频运行对电力系统运行的影响; 电力系统频率的静态和动态特性; 自动低频减载的工作原理;
2
第六章 电力系统自动低频减载及其他安全自 动控制装置
n
n
n
随着电力工业的迅速发展,电力系统的规模日益增大。运 行经验表明 大系统事故将使国民经济蒙受巨大损失,给人 民生活造成 极大困难 。例如 1965年 11月 9日美国电力系统 事故大约 20万 km2 的区域停电 13 h 以上,停电负荷达 2500 万 kW。 所以,对于系统性事故采取有效对策,以提高电 力系统运行的可靠性具有特别重要的实际意义。 当电力系统发生某些故障时,如不及时采取措施,就有可 能引起连锁反应,使事故扩大,以致危及整个系统的安全 运行。 本章所介绍的电力系统中常见的几种自动装置就是针对危 及系统安全运行的故障所采用的自动化对策,它们的主要 任务是,当系统发生某些故障时,按照预定的控制准则迅 速作出反应,采取必要措施避免事故扩大。
运行经验表明,某些汽轮机长时期在 f < 49~49.5Hz以下运行时,叶 片容易产生裂纹,当 f ↓→ 45Hz附近时,个别级的叶片可能发生共 振而引起断裂事故。
p发生电压崩溃现象
当 f↓时,励磁机、发电机等的 n相应↓,由于发电机的电动势↓和 电动机 n↓,加剧了系统无功不足情况,使系统电压水平↓。运行 经验表明,当 f ↓→ 46~45Hz时,系统电压水平受到严重影响,当 某些中枢点电压低于某一临界值时,将出现所谓 “ 电压崩溃 ” 现象, 系统运行的稳定性遭到破坏,最后导致系统瓦解。
微机电力自动装置原理课件第6章自动低频减载
(6 13)
PL max 就是接入低频减载装置 的功率总数。例如
某系统负荷总功率是 PL 5000 MW ,系统最大功
率缺额为 Ph max 1200 MW ;负荷调节效应系数 K L* 2,希望系统恢复频率 fh 48 HZ , 求接入低频
减载装置的功率 PL max ?
由△f随时间t的变化方程,画出其特性曲线, 如图6-2所示。
14
第6章 常用的输入输出接口芯片
6、 图6.-3 系统频率动态曲线分析
(1)电力系统当产生功率缺口时若不加调节, 系统频率fx将随时间t指数地减小。如a,b俩条 曲线。
(2)当系统自动低频减载,但是减载功率
小于功率缺口时,曲线如e所示,最后会趋于新的平 衡fb(~)。但是频率不能恢复到额定值fe。 (3)当系统自动低频减载,但是减载功率大于功率 缺口时,曲线如c所示,系统频率会恢复到额定频率fe.---这就是系统自动低频减载的原理所在。
15
第6章 常用的输入输出接口芯片
四、电力系统自动低频减载机理论的应用
1、电力系统最大缺额功率PLmax的确定 自动低频减载装置是针对事故的一种反事
故措施。并不要求系统频率恢复到额定 值,一般希望他的恢复频率低于额定值, 约为49.5~50HZ之间 .在此条件下计算出 的、接到低频减载装置上最大可能断开 功 率 △ PLmax , 所 以 它 可 小 于 电 力 系 统 最大缺额功率△Phmax 。
户的电拉掉断电。称为电力系统自动低频减载。
例如:一般情况小 发电厂A,向系统B输送的功率为PA。出现 事故的情况有二:
(1)当发电厂A发生故障时,使系统B的发电功率少了PA,若 系统B运行机组的备用容量远小于PA,则造成电网严重的功率缺 额,引起电网频率大幅度降低。如果不及时采取果断措施,切除 部分负荷。将影响的安全运行或造成整个电网系统崩溃的危险。
第六章按频率自动减负荷装置总结课件

20
• 由于负荷调节效应的存在,当电力系统因有功功率 不平衡引起频率变化时,负荷自动改变消耗的有功 功率,对系统有一定的补偿作用,使系统可以稳定 运行在一个新的频率。但是,负荷的频率调节效应 毕竟是有限的,当电力系统出现较大的有功功率缺 额时, 如果仅仅依靠负荷的频率调节效应来补偿, 系统频率将会降低到不允许程度,从而破坏系统的 安全稳定运行。在这种情况下, 必须借助按频率自 动减负荷装置(简称AFL装置)来切除一部分不重要 的负荷,才能保证系统的安全稳定运行。
用标幺值表示,并取额定频率时的负荷功率PLN为功 率PL 的基准值,额定频率fN为频率f 的基准值,则有
显然,当系统的频率为额定值时, f*=1 ,PL*=1,
于是:
15
• 电力系统负荷的静态频率特性曲线如图6-1所示:
•当频率下降时,负荷从系统中 取用的功率将下降;
•系统频率升高时,负荷从系统 中取用的功率将增加。
19
•KL*是一个无量纲的数,
•KL*是调度部门要掌握的数据, 在实际系统中,需要 经过测试求得,也可根据负荷统计资料分析估算确定。
•对同一个系统,KL* 随季节及昼夜交替而变化,但差 别不大,因此对一个系统而言可近似认为KL*是不变 的,一般负荷调节效应系数在1~3之间 。
•KL与负荷的大小有关,调度部门只要掌握KL* 的值, 就很容易算出KL 的值,从而得到频率偏移量与功率 调节量之间的关系。
7
• 频率异常不同于系统正常运行中的频率波动。 • 频率异常是系统发生事故时,由于突然造成的有
功功率严重不平衡引起的频率大幅度剧烈变化。 • 导致有功功率平衡关系突变的直接原因有: • (1)两个系统间联络线因故障跳开。 • (2)系统内有大机组突然故障退出运行,而旋转
• 由于负荷调节效应的存在,当电力系统因有功功率 不平衡引起频率变化时,负荷自动改变消耗的有功 功率,对系统有一定的补偿作用,使系统可以稳定 运行在一个新的频率。但是,负荷的频率调节效应 毕竟是有限的,当电力系统出现较大的有功功率缺 额时, 如果仅仅依靠负荷的频率调节效应来补偿, 系统频率将会降低到不允许程度,从而破坏系统的 安全稳定运行。在这种情况下, 必须借助按频率自 动减负荷装置(简称AFL装置)来切除一部分不重要 的负荷,才能保证系统的安全稳定运行。
用标幺值表示,并取额定频率时的负荷功率PLN为功 率PL 的基准值,额定频率fN为频率f 的基准值,则有
显然,当系统的频率为额定值时, f*=1 ,PL*=1,
于是:
15
• 电力系统负荷的静态频率特性曲线如图6-1所示:
•当频率下降时,负荷从系统中 取用的功率将下降;
•系统频率升高时,负荷从系统 中取用的功率将增加。
19
•KL*是一个无量纲的数,
•KL*是调度部门要掌握的数据, 在实际系统中,需要 经过测试求得,也可根据负荷统计资料分析估算确定。
•对同一个系统,KL* 随季节及昼夜交替而变化,但差 别不大,因此对一个系统而言可近似认为KL*是不变 的,一般负荷调节效应系数在1~3之间 。
•KL与负荷的大小有关,调度部门只要掌握KL* 的值, 就很容易算出KL 的值,从而得到频率偏移量与功率 调节量之间的关系。
7
• 频率异常不同于系统正常运行中的频率波动。 • 频率异常是系统发生事故时,由于突然造成的有
功功率严重不平衡引起的频率大幅度剧烈变化。 • 导致有功功率平衡关系突变的直接原因有: • (1)两个系统间联络线因故障跳开。 • (2)系统内有大机组突然故障退出运行,而旋转
第六章 电力系统自动低频减载装置 《电力系统自动装置(第2版)》教学课件
§6-3 微机频率电压紧急控制装置 四、装置异常闭锁措施
5、频率差闭锁: 当电网的各相频差>0.2Hz时不进行频率
判断,闭锁频率判断回路。 6、频率值异常闭锁:
当f≤45Hz或f≥55Hz则认为测量频率值异 常,并将频率显示值置为零,闭锁频率判 回路,显示频率超限。
§6-3 微机频率电压紧急控制装置 五、防止低频低压过切负荷的措施
4、电力系统发生低频振荡时,低频减载装置不 应误动作。
5、电力系统受谐波干扰时,低频减载装置不应 误动作。
§6-2 自动低频减载装置的工作原理 二、最大功率缺额的确定
当系统出现有功功率缺额时,为了使停电的用户 尽可能少,一般希望系统频率恢复到可运行的水平 即可,并不要求恢复到额定频率,即系统恢复频率 小于额定功率。这样,低频减载装置可能断开的最 大功率△ PL.max 可小于最大功率缺额△Ph.max 。设正常 运行时系统负荷为 PL ,根据式(6-7)可得
§6-2 自动低频减载装置的工作原理 三、自动低频减载装置动作顺序
统允许2)的最最末低一频级率起受动“频频率率f n崩的溃选”择或:“电电力压系崩 溃’’的限制。对于高温高压的火电厂,在频 率低于46~46.5Hz时,厂用电已不能正常工作; 在频率低于45Hz时,就有“电压崩溃”的危险。 因此,最末一级的起动频率宜整定为46~ 46.5Hz.
§6-2 自动低频减载装置的工作原理 五、自动低频减载装置的动作时限
自动低频减载装置的动作时限,原则上应越短越好,但 还应考虑到系统的某些不正常运行状态可能造成装置误动作。 例如:当系统发生振荡时,由于频率偏离额定值装置误动; 在系统发生短路故障的暂态过程中,由于非周期分量、谐波 分量引起畸变,使频率测量产生误差,引起装置误动作;有 时系统出现短时的功率缺额也会误动作;电压突变时,在低 频继电器的频率敏感回路中产生过渡过程,致使低频继电器 误动作,从而造成装置误动作。为了防止以上各种可能的误 动情况的发生,自动低频减载装置必须带有一定的动作延时, 此动作延时不能太长,否则系统频率会降低到临界,一般延 时0.5s左右。
电力系统自动化第六章

三、自动切机与电气制动
PA
B系统 系统
L1 L2
A电厂 电厂
其中一回输电线路发生三相短路时, 其中一回输电线路发生三相短路时,即使继电 保护正确动作,电厂A功率过剩 功率过剩, 保护正确动作,电厂 功率过剩,仍有失去稳定的 可能。为保持系统稳定, 可能。为保持系统稳定,需要迅速减少输送功率 由于调速系统执行部件固有的机械惯性, 由于调速系统执行部件固有的机械惯性,使它 来不及迅速作出反应, 来不及迅速作出反应,故障期间的过剩功率将导致 发电机组转子加速, 发电机组转子加速,以致失去稳定
Tx f Ph* d f* + f* = dt K L*
f x 按指数曲线变化
四、自动低频减载的工作原理
当系统发生严重功率缺额时, 当系统发生严重功率缺额时,自动低频减载 装置的任务是迅速断开相应数量的用户负荷, 装置的任务是迅速断开相应数量的用户负荷, 使系统频率在不低于某一允许值的情况下, 使系统频率在不低于某一允许值的情况下,达 到有功平衡
f cz
与 解列点断 门 路器跳闸
(a) 频率启动 图6-13
(b) 解列逻辑 自动解列装置逻辑图
二、水轮机组低频自启动装置 水轮发电机启动较快, 水轮发电机启动较快,汽轮发电机启动较慢
正常运行中,系统的热备用容量不可能很大, 正常运行中,系统的热备用容量不可能很大,当 系统发生低频率事故时, 系统发生低频率事故时,希望冷备用机组能迅速启 动投入电力系统运行,以提高系统运行的可靠性。 动投入电力系统运行,以提高系统运行的可靠性。 水轮机在启动过程中, 水轮机在启动过程中,转速随时间变化的曲线称 为启动特性,它取决于水轮机的型式、 为启动特性,它取决于水轮机的型式、调速器的特 性、调速机件的位置和导水叶开度限制器的开度等
电力系统自动低频减载
频率,约49.5~50Hz之间,称为恢复频率fh。接至自
动低频减载装置的总功率将小于50Hz时的最大功率缺
额,两者之差为频率由50Hz下降至fh所少吸收的功率
ΔPhmax − ΔPLmax PLN − ΔPLmax
=
K L∗Δf∗
ΔPL max
=
ΔPhmax − K L∗PLN Δf∗ 1− KL∗Δf∗
第六章电力系统自动低频减载及安全自动控制装置
(5)自动低频减载后备段 若第i级切负荷后,频率下降不足以使第i+1级启
动,则频率将稳定在低于恢复频率fh的较低频率,这 样是不允许的。
设置后备段,其在常规 减负荷第1级启动时开始 计时,延时一定时间(等 系统频率稳定)后启动第 1级后备段切负荷,每级 延时Δt,直到频率高于 恢复频率。第1级后备段 延时10~12秒,每级差5 秒
第六章电力系统自动低频减载及安全自动控制装置
第二节 自动低频减载 二、电力系统频率静态特性 由于负荷的频率调节效应,在频率下降时,将 自动减少功率的吸收。 设ΔPh为功率缺额(已扣除发电机备用容量)
Δf = 1 ΔPh KL
Δf = 50 ΔPh K L∗PLN
Δf = ΔPh% 2K L∗
第六章电力系统自动低频减载及安全自动控制装置
i=2 i=3
ΔPL 2∗
=
(1 −
0.01626) 1.6(0.03 − 0.01) 1−1.6× 0.01
=
0.032
ΔPL2 = 0.032 × 2000 = 64MW
ΔPL 2∗
=
(1 −
0.01626
−
0.032) 1.6(0.04 − 0.01) 1−1.6× 0.01
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§6-2 自动低频减载装置的工作原理 三、自动低频减载装置动作顺序
§6-2 自动低频减载装置的工作原理 四、每级切除负荷的限值
Pi1 i 1
PL Phk
K L
fi fN
k 1
Pi1
1
i 1
Phk
K
Lfi
k 1
PLi
1
i1
Phk
k 1
K L (fi f ri ) 1 K Lf ri
Ph.max PL.max PL PL.max
K Lf
PL. m a x
Ph. m a x 1
K L PL f K Lf
§6-2 自动低频减载装置的工作原理 三、自动低频减载装置动作顺序
根据起动频率的不同,低频减载装置可分为若 干级,按所接负荷的重要性又分为n个基本级和n个 特殊级。
1、基本级。基本级的作用是根据频率下降的程 度,依次切除不重要的负荷,制止系统频率的继续 下降。为了确定基本级的级数,首先应该确定第一 级起动频率 f1 和最末一级起动频率 fn 的数值。
Tfqs----为低频启动延时定值。
§6-3 微机频率电压紧急控制装置 三、微机频率电压紧急控制装置动作原理
§6-1 概述 二、系统的动态频率特性
§6-2 自动低频减载装置的工作原理 一、对自动低频减载装置的基本要求
1、能在各种运行方式出现功率缺额的情况下, 有计划地切除负荷,防止系统频率下降至危险点以 下。
2、切除的负荷应尽可能少,应防止超调和悬停 现象。
3、变电所的馈电线路故障使变压器跳闸造成失 压时,低频减载装置应可靠闭锁,不应误动作。
§6-2 自动低频减载装置的工作原理 三、自动低频减载装置动作顺序
1)第一级起动频率 f1 的确定:由图6-3所示系 统频率动态特性曲线的规律可知,在事故初期若能 及早切除负荷功率,对于延缓频率的下降是有利的, 因此第一级的起动频率宜选择得高一些。但是,又 必须计及电力系统启动旋转备用容量所需的时间延 迟,避免暂时性的频率下降而断开负荷功率。所以, 一般第一级的起动频率 f1 整定为(47.5~48.5)Hz。
§6-3 微机频率电压紧急控制装置 一、微机频率电压紧急控制装置的硬 件
§6-3 微机频率电压紧急控制装置 三、微机频率电压紧急控制装置动作原理
§6-3 微机频率电压紧急控制装置 三、微机频率电压紧急控制装置动作原理
微机低频减载装置的动作条件 (1)低频启动条件:
f≤fq t≥Tfqs 式中 fq----低频启动定值;
§6-1 概述 一、低频运行的危害性
(3)系统频率若长时间运行在49.5~49Hz以下 时,某些汽轮机的叶片容易产生裂纹;当频率 降低到45Hz附近时,汽轮机个别级别的叶片可 能发生共振而引起断裂事故。
运行实践表明:电力系统的运行频率偏差不 超过±o.2Hz;系统频率不能长时间运行在(49 .5~49)Hz以下;事故情况下.不能较长时间 停留在47Hz以下;系统频率的瞬时值绝对不能 低于45Hz。
§6-2 自动低频减载装置的工作原理 三、自动低频减载装置动作顺序
统允许2)的最最末低一频级率起受动“频频率率f n崩的溃选”择或:“电电力压系崩 溃’’的限制。对于高温高压的火电厂,在频 率低于46~46.5Hz时,厂用电已不能正常工作; 在频率低于45Hz时,就有“电压崩溃”的危险。 因此,最末一级的起动频率宜整定为46~ 46.5Hz.
§6-2 自动低频减载装置的工作原理 三、自动低频减载装置动作顺序
3)级数n的确定:当 f1 和 f n 确定以后,就可以 在此频率范围内按频率级差 f 确定n个起动频率值, 即n级,将负荷功率 PL.max 分配在这些不同的起动 频率值上。其中级数n应选择为
n f1 fn 1 f
§6-2 自动低频减载装置的工作原理 三、自动低频减载装置动作顺序
4、电力系统发生低频振荡时,低频减载装置不 应误动作。
5、电力系统受谐波干扰时,低频减载装置不应 误动作。
§6-2 自动低频减载装置的工作原理 二、最大功率缺额的确定
当系统出现有功功率缺额时,为了使停电的用户 尽可能少,一般希望系统频率恢复到可运行的水平 即可,并不要求恢复到额定频率,即系统恢复频率 小于额定功率。这样,低频减载装置可能断开的最 大功率△ PL.max 可小于最大功率缺额△Ph.max 。设正常 运行时系统负荷为 PL ,根据式(6-7)可得
第六章 电力系统自动低频 减载装置
大学电力工程系自动装置课程组
§6-1 概述 一、低频运行的危害性
(1)由于频率降低,火电厂厂用机械的出力将显著 降低,导致发电厂发出的有功功率进一步减少,功 率缺额更加严重.系统频率进一步降低的恶性循环, 严重时造成系统频率崩溃。
(2)频率降低时,励磁机、发电机等的转速相应降 低,导致发电机的电动势下降,使系统电压水平下 降,系统运行稳定性遭到破坏,严重时出现电压崩 溃现象。
§6-2 自动低频减载装置的工作原理 五、自动低频减载装置的动作时限
自动低频减载装置的动作时限,原则上应越短越好,但 还应考虑到系统的某些不正常运行状态可能造成装置误动作。 例如:当系统发生振荡时,由于频率偏离额定值装置误动; 在系统发生短路故障的暂态过程中,由于非周期分量、谐波 分量引起畸变,使频率测量产生误差,引起装置误动作;有 时系统出现短时的功率缺额也会误动作;电压突变时,在低 频继电器的频率敏感回路中产生过渡过程,致使低频继电器 误动作,从而造成装置误动作。为了防止以上各种可能的误 动情况的发生,自动低频减载装置必须带有一定的动作延时, 此动作延时不能太长,否则系统频率会降低到临界,一般延 时0.5s左右。
f 2fer ft f y
§6-2 自动低频减载装置的工作原理三、 自动低频减载装置动作顺序
2、特殊级。从基本级的工作原理源自以看出,在 装置的动作过程中,可能出现这样的情况:第 i 级 动作之后,系统频率可能稳定在 fi ,它低于恢复频 率的极限值,但又不足以使第 i +1级动作,如图6-4 中的曲线2所示。于是系统频率将长时间停留在较低 水平上,显然这是不允许的。为了消除这种现象, 在低频减载装置中增加了特殊级,其动作频率一般 取为(47.5~48.5)Hz。