电涡流位移传感器线圈优化设计
基于MAX1452的电涡流传感器设计
基于MAX1452的电涡流传感器设计电涡流传感器是一种常用于测量金属零件精确位置和运动的传感器。
利用电磁感应原理,电涡流传感器能够检测金属零件表面的微小电流变化,从而实现对金属零件位置和运动的监测和控制。
MAX1452是一款专为电涡流传感器设计的高精度、低噪声的模拟前端芯片。
MAX1452具有内置的放大器和低噪声ADC,能够将传感器输出的微小电流信号转换为数字信号,实现对电涡流传感器的数据处理和分析。
其次,在设计过程中需要考虑传感器的灵敏度和分辨率。
灵敏度表示传感器的输出变化与被测量物理量变化之间的关系,分辨率表示传感器能够分辨并测量的最小物理量变化。
调整线圈的尺寸和形状、选择合适的磁芯材料和线圈材料,以及调整放大器的增益等都可以影响传感器的灵敏度和分辨率。
此外,为了提高传感器的抗干扰能力,还可以在设计过程中考虑使用差分输入模式和滤波技术。
差分输入模式可以抵消来自于电源和环境的共模噪声,提高信号的纯净度;而滤波技术可以减少高频噪声的干扰,提高传感器的信噪比。
最后,基于MAX1452的电涡流传感器设计还需要进行信号调理和数据处理。
MAX1452提供了内置的放大器和低噪声ADC,但这些数字信号可能还需要经过滤波、放大、抖动补偿等处理,才能得到精确的测量结果。
总结起来,基于MAX1452的电涡流传感器设计需要考虑传感器元件的选择、灵敏度和分辨率的调整、抗干扰能力的提高以及信号调理和数据处理等方面。
通过合理的设计和优化,电涡流传感器可以广泛应用于工业自动化、机械制造、汽车电子等领域,实现对金属零件的高精度测量和控制。
电涡流式位移传感器实验的意见和建议

电涡流式位移传感器实验的意见和建议
1. 建议在实验中使用多种不同频率和振幅的电信号来激励传感器,以尽可能模拟实际工作环境中的各种情况。
2. 注意传感器的位置和固定方式,确保其可以准确测量被测物体的位移。
可以考虑使用夹具或固定装置来保持传感器的稳定性。
3. 实验过程中应注意传感器与被测物体之间的间隙,过大或过小的间隙都可能影响传感器的测量精度。
可以通过调整固定装置或使用衬垫来控制间隙大小。
4. 定期检查传感器的工作状态和连接,确保传感器的正常运行。
如果发现异常,应及时进行修理或更换。
5. 可以尝试不同的工作频率和振幅,观察传感器的响应以及可能的非线性效应。
这有助于了解传感器的工作特性和测量范围。
6. 在实验中可以降低环境噪声的干扰,例如关闭其他电子设备或使用屏蔽材料来隔离传感器与外界干扰。
7. 需要注意传感器的最大工作温度和压力范围,避免在超过其额定范围的条件下进行实验。
8. 实验中可以与其他传感器进行对比,评估电涡流传感器在位移测量中的优势和局限性。
9. 在实验结果分析中,应注意量化传感器的精度、灵敏度和稳定性,并与理论预测进行比较。
10. 探索不同的实验条件和方法,例如改变激励信号波形、增加噪声等,以评估感测器的性能和鲁棒性。
总之,在电涡流式位移传感器实验中,要注意实验环境的控制、传感器的稳定性和精确性以及对传感器进行全面的评估和分析。
传感器应用实例:电涡流式位移传感器的设计
3.2.6电涡流缓速器
涡流制动通常与传统制动搭配使用,在大多数商用车(大 中型客车和卡车)上担任控制车速的作用,所以通常也称 为电涡流缓速器。
电涡流缓速器安装在汽车驱动桥与变速箱之间,靠电涡
流的作用力来减速。当缓速器的定子线圈通入直流电的时 候,在定子线圈会产生磁场,该磁场在相邻铁心、磁极板、 气隙、转子之间形成一个回路,此时如果转子和定子之间 有相对运动,这种运动就相当于导体在切割磁力线,由电 磁感应原理可知,这时候在导体内部会产生感生电流,由 于转子这个导体很大,在转子上产生的感生电流是以涡电 流的形式存在的,同时感生电流会产生另外一个感生磁场, 该磁场和已经存在的磁场之间会有作用力,而作用力的方 向永远是阻碍导体运动的方向。这就是缓速器制动力矩的
来源。
任务3.2 电涡流式位移传感器的设计
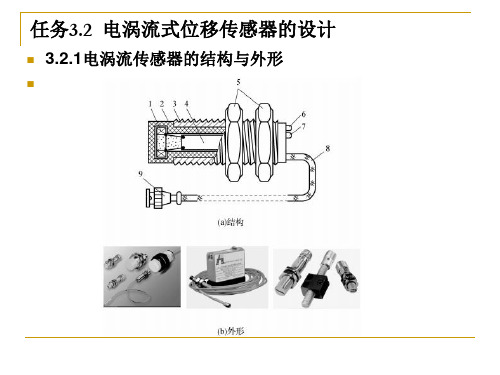
3.2.1电涡流传感器的结构与外形
3.2.2 电涡流传感器工作原理
3.2.3 电涡流传感器的测量电路
由电涡流式传感器的工作原理可知,被测参数变化可以转 换成传感器线圈的等效阻抗的变化。测量和电桥等测量电路。
1.电桥电路
2.调幅式电路
该电路的主要特征是把传感器线圈的等效电感和一个固定 电容组成并联谐振电路,由频率稳定的石英晶体振荡器提 供高频激励信号 。
3.调频式电路
3.2.4电涡流式位移传感器的设计 1.任务分析 图3-30为电涡流式位移传感器原理框图,主要由探头和检测 电路组成。探头是一只扁平线圈及支撑骨架,线圈是整个传 感器系统的敏感元件;检测电路又叫前置器,由振荡器、检 测电路和放大器组成 。
2.电路设计
3.2.5轴向位移检测仪
对于许多旋转机械,包括蒸汽轮机、燃汽轮机、水轮机、 离心式和轴流式压缩机、离心泵等,轴向位移是一个十分 重要的信号,过大的轴向位移将会引起过大的机构损坏。 轴向位移反映的是汽轮机转动部分和静止部分的相对位置, 轴向位移变化,也是静子和转子轴向相对位置发生了变化。 轴向位移的测量,可以指是旋转部件与固定部件之间的轴 向间隙或相对瞬时的位移变化,用以防止机器的破坏。
电涡流位移传感器设计
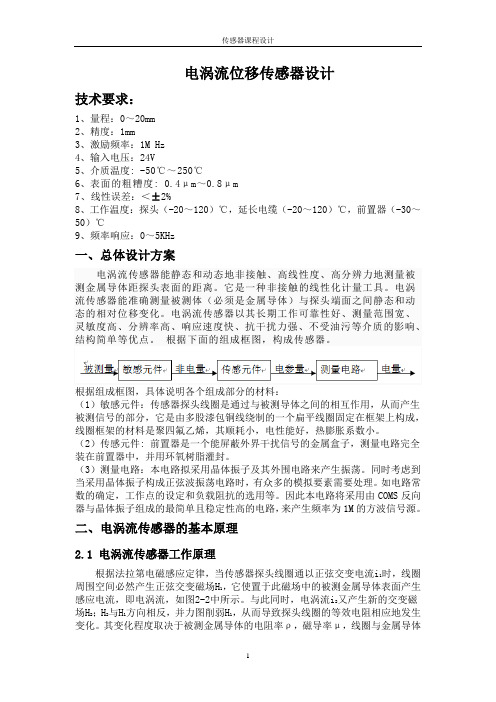
电涡流位移传感器设计技术要求:1、量程:0~20mm2、精度:1mm3、激励频率:1M Hz4、输入电压:24V5、介质温度: -50℃~250℃6、表面的粗糟度: 0.4μm~0.8μm7、线性误差:<±2%8、工作温度:探头(-20~120)℃,延长电缆(-20~120)℃,前置器(-30~50)℃9、频率响应:0~5KHz一、总体设计方案电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。
它是一种非接触的线性化计量工具。
电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。
电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点。
根据下面的组成框图,构成传感器。
根据组成框图,具体说明各个组成部分的材料:(1)敏感元件:传感器探头线圈是通过与被测导体之间的相互作用,从而产生被测信号的部分,它是由多股漆包铜线绕制的一个扁平线圈固定在框架上构成,线圈框架的材料是聚四氟乙烯,其顺耗小,电性能好,热膨胀系数小。
(2)传感元件: 前置器是一个能屏蔽外界干扰信号的金属盒子,测量电路完全装在前置器中,并用环氧树脂灌封。
(3)测量电路:本电路拟采用晶体振子及其外围电路来产生振荡。
同时考虑到当采用晶体振子构成正弦波振荡电路时,有众多的模拟要素需要处理。
如电路常数的确定,工作点的设定和负载阻抗的选用等。
因此本电路将采用由COMS反向器与晶体振子组成的最简单且稳定性高的电路,来产生频率为1M的方波信号源。
二、电涡流传感器的基本原理2.1 电涡流传感器工作原理根据法拉第电磁感应定律,当传感器探头线圈通以正弦交变电流i1时,线圈周围空间必然产生正弦交变磁场H1,它使置于此磁场中的被测金属导体表面产生感应电流,即电涡流,如图2-2中所示。
与此同时,电涡流i2又产生新的交变磁场H2;H2与H1方向相反,并力图削弱H1,从而导致探头线圈的等效电阻相应地发生变化。
电涡流位移传感器信号调理与位移显示电路的设计【文献综述】 (2)
文献综述电涡流位移传感器信号调理与位移显示电路的设计在基础学科研究和现代工业生产中,传感器具有不可或缺的作用。
电涡流位移传感器是一种据电涡流效应制成的常用物理传感器,其输出振荡电压随被测体(必须是金属导体)与探头之间的距离变化而变化,因此能测量被测体发生的静态和动态的相对位移变化,从而被广泛地应用于数据采集系统中。
目前国内研制的多数电涡流位移传感器测量物体位移变化时输出都是电压信号的绝对值,由于被测体位移相对变化很小,而传感器输出的电压信号初始值太大,以致变化量很小,从而不能很好地反映被测体位移的变化。
本课题即是对电涡流位移传感器进行信号调理设计,通过减法放大电路使传感器输出电压减去初始值后再进行放大,从而保证被放大的电压只对应位移变化部分,且从零点开始。
然后基于单片机设计传感器的工作电源和输出位移的显示电路,使输入输出信号都能清楚、直观地显示。
下图1是通用数据采集系统的组成和信号传输流程。
可见,信号调理电路是数据采集系统的重要组成部分。
信号处理电路,就是把模拟信号变换为用于数据采集、控制过程、执行计算显示读出或其他目的的数字信号。
传感器测量的很多物理量,如位移、温度、压力、光强等,输出后都是相当小的电压、电流或电阻变化,必须对其进行调理,即利用内部的电路(如滤波器、转换器、放大器等)将信号通过放大、滤波等操作转换成采集设备能够识别的标准信号,以便用于系统的数据处理。
图1黎琼,陈文庆,温泉彻[3]介绍了通用数据采集系统的组成及信号调理的重要性,然后以热电偶温度传感器及热电偶温度变送器为例,说明了传感器调理一般应包含补偿、线性化和激励三部分内容,且介绍了变送器与传感器的主要区别。
最后在给出典型信号调理电路的基础上,说明了通用数据调理功能(放大、隔离、滤波和数字信号调理)及电路实现,对基于PC机和ADC卡的通用数据采集系统的信号调理具有借鉴作用。
乔巍,杜爱玲,陈春,叶生[4]针对基于微控制器和PC的高速数据采集系统,分析了信号调理电路功能及必要性,并在此基础上给出了包括信号放大、衰减、隔离和滤波的设计方案,并对滤波电路的拓扑设计进行了研究。
实验二 电涡流传感器位移实验
实验二 电涡流传感器位移实验一、实验目的1.了解涡流式传感器的原理及工作性能。
2.熟悉实验仪器,掌握传感器使用过程中的注意事项。
二、结构和原理(此部分不用写在实验报告上)电涡流传感器是一种能将机械位移,振幅和转速等参量转换成电信号输出的非电量电测装置。
它由探头,变换器,连接电缆及被测导体组成,是实现非接触测量的理想工具。
其最大特点就是结构简单,可以实现非接触测量,具有灵敏度高、抗干扰能力强、频率响应宽、体积小等特点,因此在工业测量领域得到了越来越广泛的应用。
1. 涡流效应当金属导体置于变化的磁场中,导体内就会产生感应电流,这种电流就像水中的漩涡那样,在导体内部形成闭合回路,我们通常称之为“电涡流”,称这种现象为“涡流效应”。
电涡流传感器就是在涡流效应的基础上建立起来的。
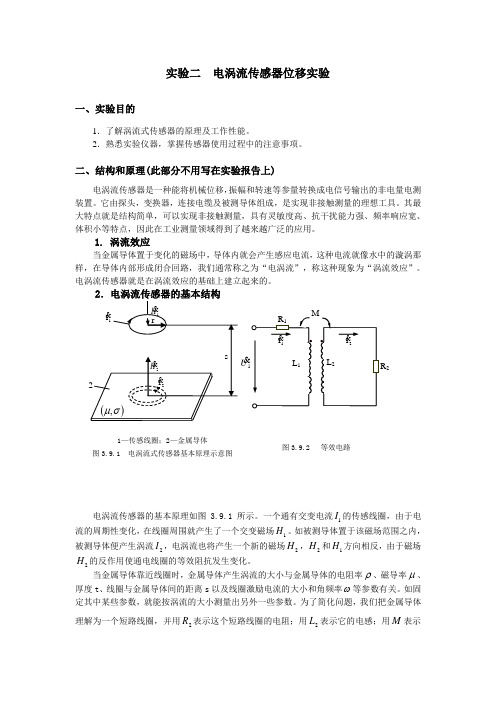
电涡流传感器的基本原理如图3.9.1所示。
一个通有交变电流1I 的传感线圈,由于电流的周期性变化,在线圈周围就产生了一个交变磁场1H 。
如被测导体置于该磁场范围之内,被测导体便产生涡流2I ,电涡流也将产生一个新的磁场2H ,2H 和1H 方向相反,由于磁场2H 的反作用使通电线圈的等效阻抗发生变化。
当金属导体靠近线圈时,金属导体产生涡流的大小与金属导体的电阻率ρ、磁导率μ、厚度t 、线圈与金属导体间的距离s 以及线圈激励电流的大小和角频率ω等参数有关。
如固定其中某些参数,就能按涡流的大小测量出另外一些参数。
为了简化问题,我们把金属导体 理解为一个短路线圈,并用2R 表示这个短路线圈的电阻;用2L 表示它的电感;用M 表示图3.9.2 等效电路U1—传感线圈;2—金属导体图3.9.1 电涡流式传感器基本原理示意图2它与空心线圈之间的互感;再假设电涡流空心线圈的电阻与电感分别为1R 和1L ,就可画出如图3.9.2所示的等效电路。
经推导电涡流线圈受被测金属导体影响后的等效阻抗为L j R L L R M L j L R M R R I U Z ωωωωωωω+=⎪⎪⎭⎫ ⎝⎛+-+⎪⎪⎭⎫⎝⎛++==22222222122222222111式中 R —电涡流线圈工作时的等效电阻;L —电涡流线圈工作时的等效电感。
电涡流传感器的仿真与设计
电涡流传感器的仿真与设计一、本文概述随着科技的飞速发展,传感器技术作为现代工业、自动化控制以及科研实验等领域中不可或缺的一环,其重要性日益凸显。
电涡流传感器作为一种非接触式测量工具,因其高精度、快速响应和广泛的应用范围,受到了广泛关注。
本文旨在深入探讨电涡流传感器的仿真与设计,以期为其在实际应用中的优化和改进提供理论支持和实践指导。
本文首先将对电涡流传感器的基本原理进行阐述,包括电涡流效应的产生机制以及传感器的工作原理。
在此基础上,我们将对电涡流传感器的仿真技术进行深入分析,探讨如何利用仿真软件对传感器性能进行预测和优化。
接着,本文将重点讨论电涡流传感器的设计要点,包括线圈结构、信号处理电路、屏蔽措施等方面,以期提高传感器的测量精度和稳定性。
本文还将关注电涡流传感器在不同应用场景下的性能表现,如高温、高湿、强电磁干扰等恶劣环境下的适应性。
通过实际案例分析,我们将对传感器的性能进行客观评估,并提出针对性的改进措施。
本文将展望电涡流传感器未来的发展趋势,探讨新技术、新材料在传感器设计中的应用前景。
通过本文的研究,我们期望能够为电涡流传感器的仿真与设计提供一套系统的理论框架和实践方法,推动传感器技术的不断发展和创新。
二、电涡流传感器的基本原理电涡流传感器,作为一种非接触式的测量工具,其基本原理基于法拉第电磁感应定律和电涡流效应。
当交变电流通过传感器线圈时,会在其周围产生交变磁场。
当这个磁场靠近导电材料(如金属)表面时,会在材料内部感应出电涡流。
电涡流的大小和相位与磁场强度、材料电导率、磁导率以及传感器与材料之间的距离有关。
电涡流传感器通过测量这个交变磁场与电涡流之间的相互作用,从而实现对材料性质或位置的测量。
具体来说,当传感器与被测物体之间的距离发生变化时,电涡流的大小和相位也会相应变化,进而引起传感器线圈的电感、阻抗或电压的变化。
通过测量这些电气参数的变化,可以实现对被测物体位置、材料电导率等物理量的测量。
电涡流位移传感器设计完整版本
课程设计报告与说明书《电涡流位移传感器》课程设计学生姓名:_________ ___________ 学号:____________ 入学时间: 14 年秋季专业:___机械设计制造及其自动化___ 直属/分校:__________直属____________ 指导教师:______ 解晓光__________大连广播电视大学2014年12月设计题目:电涡流位移传感器课程设计一、设计要求1、量程::0~20mm2、精度:1mm3、激励频率:1M Hz4、输入电压:24V5、介质温度: -50℃~250℃6、表面的粗糟度: 0.4μm~0.8μm7、线性误差:<±2%8、工作温度:探头(-20~120)℃,延长电缆(-20~120)℃,前置器(-30~50)℃9、频率响应:0~5KHz二、总体设计方案电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。
它是一种非接触的线性化计量工具。
电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。
电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点。
根据下面的组成框图,构成传感器。
根据组成框图,具体说明各个组成部分的材料:(1)敏感元件:传感器探头线圈是通过与被测导体之间的相互作用,从而产生被测信号的部分,它是由多股漆包铜线绕制的一个扁平线圈固定在框架上构成,线圈框架的材料是聚四氟乙烯,其顺耗小,电性能好,热膨胀系数小。
(2)传感元件: 前置器是一个能屏蔽外界干扰信号的金属盒子,测量电路完全装在前置器中,并用环氧树脂灌封。
(3)测量电路:本电路拟采用晶体振子及其外围电路来产生振荡。
同时考虑到当采用晶体振子构成正弦波振荡电路时,有众多的模拟要素需要处理。
如电路常数的确定,工作点的设定和负载阻抗的选用等。
因此本电路将采用由COMS反向器与晶体振子组成的最简单且稳定性高的电路,来产生频率为1M的方波信号源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2. 2 目标函数 线圈设计的目标是要在体积尽可能小的情况下获得较高的灵敏度[ 4] , 即要求导线总长度 ( L ) 越短越
好, 线圈阻抗导数(
d d
Zx )
越大越好. 另外,
考虑到线圈的整体性能, 线圈的品质因数(
Q)
也要包含到目标函
数中. 考虑到三者数量级相差较大, 求和不适宜, 故采用品质因数和导数的乘积再除以导线总长作为目标
第8卷 第3期 2007 年 6 月
北华大学学报( 自然科学版) JOU RN AL O F BEIHU A U N IVERSIT Y ( N atural Science)
文章编号: 1009 4822( 2007) 03 0285 04
Vol. 8 No. 3 Jun. 2007
电涡流位移传感器线圈优化设计
[ 2] Andrea Ber nieri, G iovanni Betta, L uig i F er rigno. Characterization of an Eddy Current Based System for Nondestructive T esting[ J] . I EEE T ranscations on M agnet ics, 2002, 51( 2) : 241 245.
下, 优化得 到 的 检 测线 圈 尺 寸 为 外 半径 2 mm , 轴 向 高 度 1. 2 mm , 内 半 径 0. 7 m m, 线 圈导 线 总 长 度
1. 323 2 m. 为比较优化线圈的性能, 特选择了 7 种尺寸线圈的性能参数列于表 1. 从表中数据可以看出:
优化后的线圈( 表中编号 3) 品质因数很高, 线圈等效阻抗导数较高, 导线总长度比较适宜. 这 7 种线圈的
导线长度/ m 1. 206 4
2
内径: 0. 8 厚度: 3. 0
3
内径: 0. 7 厚度: 1. 2
4
内径: 1. 0 厚度: 2. 0
5
内径: 0. 6 厚度: 0. 6
135. 93 1 871. 5 55. 573 956. 85
2. 000 7 3. 575 1 7. 502 2 1. 341 7
种群中的个体进行交换. 交换方法采用首尾两个个体互换低 5 位值, 依次进行. 当前后两次目标函数的计
算值之差小于给定值是就认为寻优结束.
2. 4 程序框图
图 3 表示的是整个算法的流程框图.
3 仿真计算
利用 MAT LAB 编写程序实现上述算法. 针对实际情况, 检测线圈的外半径限定在 2 mm . 在此条件
2. 3. 3 适应度函数 f
以目标函数作为适应度函数 f , 即以每 1 个个体 i 的目标函数值作为其适应度函数值 f i . 其复制的概
率 Pi =
f
i
f
,
i
复制的个数Ri
=
f i, fi
其中,
f
i
是f
i
的平均值.
2. 3. 4 交换与最优解的确定
在确定了各个个体的复制个数之后, 适应度低的个体已经被淘汰. 为了保证种群众个体的多样性, 对
R
2 2
2
+
M2 2L
2 2
+
j
( L 1-
L2
R
2 2
2
+
M
2 2
L
2 2
)
=
Re+ j
Le,
( 2)
Re =
R1 +
R2
R
2 2
2
+
M2 2L
2,
2
Le =
L1-
L2
R
2 2
2
+
M2 2L
2.
2
图 2 电涡流等效电路 Fig. 2 The equi valent circuit of eddy current
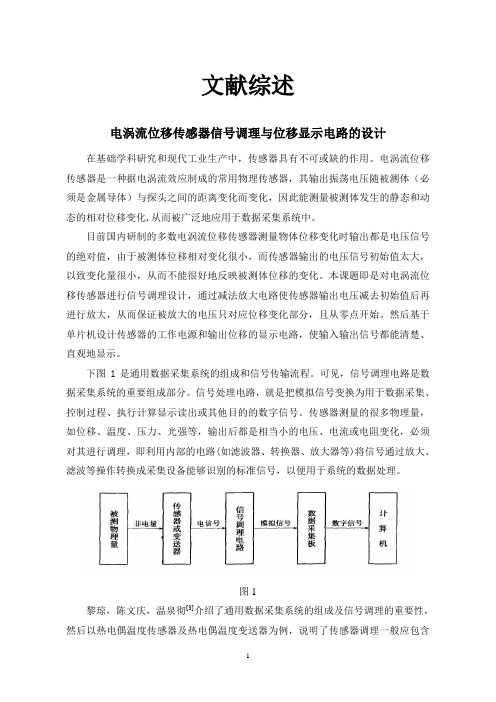
1 电涡流位移传感器的原理
1 块金属导体放置在 1 个线圈附近, 相互不接触,
如图 1 所示. 当线圈中通有高频交变电流 i 1 时, 在线 圈周围产生交变磁场 1; 交变磁场 1 将通过附近的金
属导体产生电涡流 i 2, 同时产生交变磁场 2, 且 1 和 2 的方向相反. 2 对 1 有反作用, 从而使线圈中的电
- j MI 1 + ( R 2 + j L 2) I 2 = 0.
收稿日期: 2007 03 30 作者简介: 浦铁成( 1977- ) , 男, 讲师, 硕士, 主要从事先进传感技术研究.
286
北华大学学报( 自然科学版)
第8卷
利用上式可得线圈的等效阻抗为[ 2]
Z=
U in I1
=
R1+
R2
10- 27 10- 28 10- 28 10- 28
3. 166 7 1. 323 2 1. 885 0 0. 686 1
6
内径: 0. 5 厚度: 1. 5
7
内径: 1. 5 厚度: 1. 0
2 993. 7 1 837. 7
6. 600 9 10- 27 2. 611 5 10- 28
2. 827 4 1. 256 6
流 i 1 的大小和相位均发生变化, 即线圈中的等效阻抗 发生了变化, 这就是电涡流效应[ 1] .
线圈阻抗的变化与电涡流效应密切相关, 即与线 圈的半径 r 、激励电流 i 1 的幅值、频率 、金属导体的 电阻率 、磁导率 以及线圈到导体的距离 x 有关, 可
图 1 电涡流效应示意图 Fig. 1 Effect of eddy current
总体性能即目标函数值如图 4 所示. 从图 4 中可知线圈编号 3 的总体性能最佳.
表 1 7 种线圈性能的比较 Tab. 1 Performance comparison of 7 kinds of coi ls
编号 1
尺寸/ mm 内径: 0. 4 厚度: 1. 0
品质因数 1 603. 1
阻抗导数/ ( m- 1) 2. 990 3 10- 28
0000, ~ , 1. 7 1111; 厚度: 0. 5 00000, ~ , 3. 6 11111. 再将两者和并, 内径在前厚度在后. 例如内径为1 mm,
厚度为2 mm, 其编码为100001111.
2. 3. 2 初始群体
初始群体数量过大增加计算负担, 过小容易造成收敛于局部, 故初始群体的选择对算法的影响很大.
=
dk dd
dd dy
=
-
[ d2+
( l1+
2dl 1l 2 l2) 2] 2 d 2 +
l1l2 ( l1+
. l2) 2
( 4)
其中, K ( ) = 积分.
n/ 2
( 1-
0
sin2 )- 1/ 2d , 为第一类椭圆积分; E ( ) =
n/ 2
( 1-
0
sin2 ) 1/ 2d , 为第二类椭圆
关键词: 电涡流传感器; 线圈; 优化设计
中图分类号: T H822
文献标识码: A
在用于航空航天飞行器的惯性导航系统中, 高速磁悬浮转轴系统是其重要的组成部分. 磁悬浮转轴在 高速旋转时会偏离其旋转轴线, 导致与周围部件发生碰撞, 造成导航系统损坏, 因此对转轴间隙的实时精 确测量显得尤为重要. 同时, 由于惯性导航系统体积有限, 对传感器的体积有着严格的限制. 本文研究了用 于此种情况下的电涡流位移传感器检测线圈的优化设计方法.
为避免使算法收敛于局部, 初始群体应均匀分布, 且数量不宜过小, 在此选择数目为 20 个, 分别为高 4 位:
0000, 0100, 1000, 1100; 低 5 位: 00000, 01000, 10000, 11000, 11111, 交叉组合构成. 这样初始群体就均匀分
布在整个搜索范围内.
由于线圈线性范围要求为1 m m, 故线圈外半径选择为为2 mm. 变量为线圈的内径 R a 和线圈轴向厚
第3期
浦铁成, 等: 电涡流位移传感器线圈优化设计
287
度 h. 其中内径范围: 0. 2~ 1. 7 mm ; 厚度范围: 0. 5~ 3. 6 mm. 采用二进制, 各用 4 位来表示. 即内径: 0. 2
1. 0
4. 0
3. 1
0. 7
3. 0
2. 1
0. 9
4结 论
本文提出了多参数优化电涡流位移传感器检测线圈尺寸的方法, 这种方法在保证检测线圈具有较高 灵敏度和较好的总体性能的情况下尽可能地缩小了线圈的总体体积, 仿真结果证明这种优化设计方法是 成功的. 这种方法具有很好的灵活性, 只要修改初始限定条件就可以得到不同条件下的优化线圈尺寸, 对 今后电涡流传感器检测线圈尺寸的设计具有一定的参考价值.
图 3 算法程序 Fig. 3 Algorithm prcedures
图 4 7 种线圈目标函数值 Fig. 4 Objecti ve function value of 7 ki nds of coi ls