多旋翼无人机调试概述
无人机(多旋翼)组装与调试技术 5.5 锂电池着火现象
教案一、导入锂聚合物电池是多旋翼无人机使用的较多的。
锂聚合物电池具有能量密度高、更小型化、超薄化、轻量化,以及高安全性和低成本等多种明显优势,是一种新型电池。
在形状上,锂聚合物电池具有超薄化特征,可以配合各种产品的需要,制作成任何形状与容量的电池,外包装为铝塑包装,有别于液态锂电的金属外壳,内部质量隐患可立即通过外包装变形而显示出来。
检查电池外观,是否有破损,涨肚,扭曲变形,若受损严重,请停止继续使用,将电池控制在10%以内废弃处理,不能分解。
二、主要内容1.无人机锂电池着火现象1)锂电池过充、过放电锂电池组中单个电芯不平衡, 容易导致锂电池过充或者过放电,致使锂电池着火。
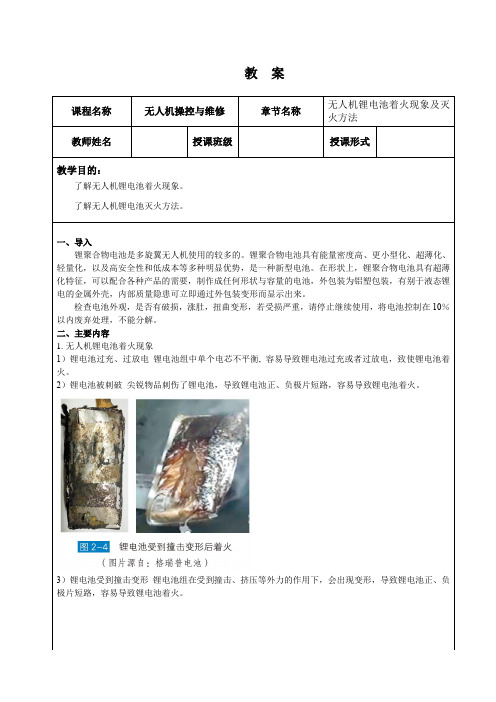
2)锂电池被刺破尖锐物品刺伤了锂电池,导致锂电池正、负极片短路,容易导致锂电池着火。
3)锂电池受到撞击变形锂电池组在受到撞击、挤压等外力的作用下,会出现变形,导致锂电池正、负极片短路,容易导致锂电池着火。
4)锂电池外部短路锂电池外部短路会引起锂电池正、负极短路或保护板元件短路,容易导致锂电池着火。
5)锂电池内部短路由于粉尘、毛刺刺破隔膜,容易导致锂电池着火。
2. 无人机锂电池消防措施(1)锂电池燃烧正确灭火方法1)锂电池组在充电过程中起火时,首先要切断充电设备的电源。
2)迅速使用石棉手套或火钳, 取下充电器上正在燃烧的锂电池,立刻搁置于地面或消防沙桶中。
3)立刻用石棉毯盖住地面上锂电池燃烧的火苗。
4)使用工兵铲铲上消防沙掩埋在石棉毯上,彻底隔绝空气将火熄灭。
(2)灭火的注意事项1)使用干粉灭火器效果不好,因干粉对扑灭固体金属化学类的火灾效果不佳,需要大量干粉才能起到完全覆盖作用,而且对设备、设施腐蚀严重,并且污染环境。
2)采用二氧化碳灭火器不会污染环境和腐蚀设备、设施,但只能对火苗瞬间起到抑制作用,必须配合使用消防沙、石棉毯,才能将火势彻底隔离、熄灭,是扑灭锂电池起火的最好方法。
3)第一发现者除了应尽快组织扑救外,还要立即使用通信工具通知值班、保安及其他人员进行增援,。
多旋翼无人机无桨调试的主要内容

多旋翼无人机无桨调试的主要内容哎呀,今天咱们聊聊多旋翼无人机无桨调试的那些事儿。
这玩意儿可真是个高科技的玩意儿,飞起来就像是现代版的“飞天大侠”。
不过,调试过程可不是随便拍拍就能搞定的。
你得准备好工具,想想,你要是去打高尔夫,没带球杆那还真是白忙活一场!所以,调试无人机时,工具、设备要齐全,才能顺利出门。
无桨调试就像是在给无人机做“体检”,首先得看看电池状况。
电池可是无人机的“命根子”,没有了它,飞起来就像是没了魂儿。
你得检查电池电量,确保它有充足的“能量”来支持接下来的飞行。
想象一下,如果电池没电,结果就是飞一半就“啪”地掉下来,那场面可真让人捧心!你得调试飞控系统。
这就好比是给无人机装上“大脑”,没有“大脑”,飞起来就乱糟糟的。
飞控系统的参数调试可得细致,别小看这一步,调整不当就可能导致无人机失控。
想想,如果无人机像个失控的孩子,四处乱飞,那场面可真是“鸡飞狗跳”啊。
然后咱们要说到传感器。
无人机上的传感器就像是它的“眼睛”,没了“眼睛”,怎么能准确判断高度、速度和位置呢?调试的时候,要确保每个传感器都正常工作,信号要清晰。
假如传感器出问题,飞行的时候就容易出岔子。
想象一下,没了“眼睛”的人走路,简直是自找麻烦。
别忘了检查遥控器。
这可是咱们操控无人机的“遥控神器”,一旦出现问题,飞行时的反应就会慢半拍。
调试时要确保遥控器和无人机之间的信号稳定,时刻保持“心有灵犀”。
遥控器坏了,别说飞,连发信号都得靠猜,实在是让人心急如焚。
还得进行一次小范围的试飞。
这一步就像是给无人机试水,看看它到底能不能飞得稳。
试飞的时候,要注意观察无人机的各项性能,看看飞行高度、速度是不是在合理范围内。
飞起来的感觉就像是驾驶一辆赛车,紧张刺激又得小心翼翼。
飞得好,心里就乐开了花;要是飞得不如意,那真是想“摔”就“摔”了。
在试飞后,如果发现问题,就得及时调整。
调试这个过程就像是在解一个复杂的数学题,得耐心、细致。
别想着一步到位,很多时候都需要多次调试。
无人机(多旋翼)组装与调试技术 2.1 凤凰模拟飞行软件(实操)

教案
主要内容
一、导入
模拟飞行是成为无人机驾驶员的入门训练,通过模拟飞行训练,既可以有效地降低训练成本,又可以快速地提升无人机驾驶的能力。
模拟飞行是依托计算机硬件和软件技术,应用互联网、局域网环境,近似于真实无人机的仿真飞行操作技术的训练。
二、内容
1.模拟飞行的优势
1)所使用的器材是普通的计算机及模拟器,降低了无人机的炸机频率,具有良好的经济性。
2)在基础训练方面,无人机模拟飞行与无人机真实飞行具有融通性。
3)高度仿真及互动性强,使模拟飞行具有实用性和应用性。
4)时间上灵活,不受设备、天气、场地和管理上的限制,在家里也可以练习。
5)没有电量限制,可以长时间进行练习。
6)通过规范的无人机模拟飞行,可以非常快地适应无人机真实飞行培训。
2.视频分享
凤凰模拟飞行软件。
项目1 多旋翼无人机的组装与调试

焊接完成后,检查是否漏焊虚焊,再用万用表测试各个焊点是否短路。
(三)整体组装
2.电机安装 使用的16颗内六角螺丝型号为 M3*8即为直径为3mm,长度为 8mm,2312电机即为定子尺寸为 23*12mm,分别有各2个CW、 CCW 。
CAR情报局
(三)整体组装
CAR情报局
2.电机安装 机臂组装过程——(小细节:将电机装到机臂上,打螺丝先打对角,打入2/3深度后打其余两颗, 再固定就完成了。),电机线头一定要朝着机臂方向,还有就是红色机臂,黑色机臂各CW、 CCW(切记不要黑色和红色都装一种)。
(三)整体组装
5.安装上中心板 安装机身上板。同样,拧螺 丝时,力度要适度,先拧至 2/3处,后全部拧紧。(此 时可以把GPS底座安在M4机 臂螺丝孔上)
CAR情报局
(三)整体组装
6.安装电机和电调 电机3根接线(黄、红、 黑),以及电调3个接线柱 (U、V、W)的连接方式, 根据多次尝试得出,红接-U, 黑接-W,黄接-V(这样接 线99%是没有问题的);倘 若个别出现问题的话,连接 电脑调参时,再任意交换2 根接线即可。
(三)整体组装
2.电机安装 组装好的电机。
CAR情报局
(三)整体组装
CAR情报局
3.安装底中心板 安装机身下板。拧螺 丝时,力度要适度, 避免拧坏螺丝,先打 对角螺丝,拧至2/3 处,全部拧完后统一 拧紧。
(三)整体组装
CAR情报局
3.安装底中心板 必须先确定好机头方 向,要注意机头方向 为M1为CCW、M2 为CW,机尾为M3为 CCW、M4为CW。 (注意电源线正对前 方为机头,也是GPS 和主控器正中心指向 方向)
无人机组装与调试
CAR情报局
无人机(多旋翼)组装与调试技术 5.3 无人机纤维类机架维修实例
教案一、导入无人机要实现自动飞行必须要使用地面站。
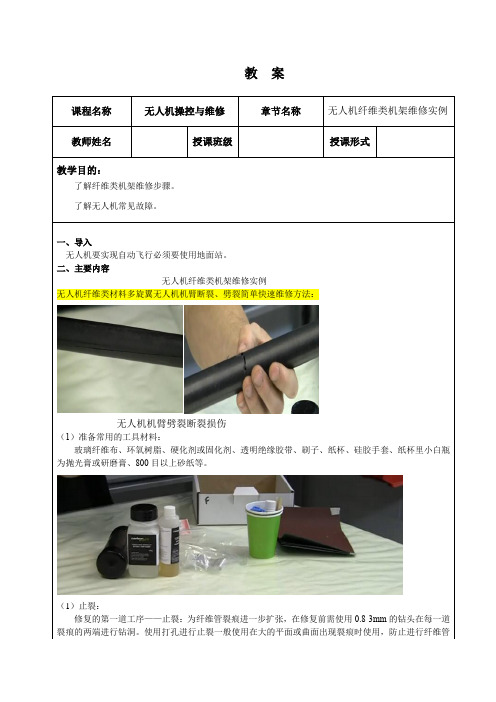
二、主要内容无人机纤维类机架维修实例无人机纤维类材料多旋翼无人机机臂断裂、劈裂简单快速维修方法:无人机机臂劈裂断裂损伤(1)准备常用的工具材料:玻璃纤维布、环氧树脂、硬化剂或固化剂、透明绝缘胶带、刷子、纸杯、硅胶手套、纸杯里小白瓶为抛光膏或研磨膏、800目以上砂纸等。
(1)止裂:修复的第一道工序——止裂:为纤维管裂痕进一步扩张,在修复前需使用0.8-3mm的钻头在每一道裂痕的两端进行钻洞。
使用打孔进行止裂一般使用在大的平面或曲面出现裂痕时使用,防止进行纤维管在受力或承受载荷情况下进一步开裂减少整个无人机机体材料的强度。
(3)开始修复在完成上一道工序--止裂,现在修复工作才正真开始,首先在用800目以上砂纸对损坏部分进行打磨清理需要修复的部位,打磨致成整个修理部位颜色均匀,表面较为平整,没有毛刺及不平整部位。
然后使用无绒干净布进行擦拭,或沾有酒精,丙酮的擦拭纸进行擦拭打磨的表面,直至无绒棉布或沾有酒精,丙酮的擦拭纸不在变颜色为止。
(4)固定选择一个固定支架将所需要维修部位进行对接或位置调整方便进一步维修。
(5)胶水调制拿出纸杯,取适中的环氧树脂倒入杯中;然后在取出环氧树脂的80%-95%的固化剂,均匀搅拌。
使环氧树脂与固化剂相互均匀,如果不均匀可能会导致维修的产品部位有一定脱胶行为,所修复部位达不到所要求强度致使修复失败。
(6)使用毛刷将混合好的环氧树脂与固化剂均匀的涂抹在所修部位。
(7)裁剪尺寸合适的玻璃纤维布,附与刚刚均匀刷好的损坏部位。
铺设一层后开始铺设第二层,使用毛刷将混合好的环氧树脂与固化剂均匀的涂抹在铺设的第一层纤维布上。
继续铺层,然后重复6、7步骤,直至完成所需要的铺层数,或达到要求强度,在铺层维修时断裂损坏一般铺层为4层以上即可达到所需强度,劈裂损坏一般铺层为3层以上即可达到所需强度。
(7)封装:铺层修理完成后,使用透明胶带进行压紧封装,在使用透明胶带时注意层与层之间禁止重合,防止固化后对外观处理的难度增大。
多旋翼无人机理论教材

1.2 无人机的分类
按活动半径分类:超近程(活动半径在15km以内)、近程(活动半径在1550km之间)、短程(活动半径在50-200km之间)、中程(活动半径在200800km之间)和远程(活动半径大于800km) 按任务高度分类:超低空(任务高度在0-100m之间)、低空(100-1000m之 间)、中空(1000-7000m之间)、高空(7000-18000m之间)、超高空(大于 18000m)。
行记录,飞行时远离干扰源(高压线对飞行器飞控IMU、图传、遥控信号均 会产生不同程度干扰)。
3)、规划飞行航线时,不要从人口密集地方飞过(飞行器失事仅仅是经济
损失,锋利的螺旋桨划伤人就是重大损失),非镜头需要不要从水库、江河、 湖泊等地方飞过(航拍作业所有数据存储于SD卡上,飞行器失事会导致前面
的的数据全部丢失)。
(5)前后运动:要想实现飞行器在水平面内前后、左右的运动, 必须在水平面内对飞行器施加一定的力。在图 e中,增加电机 3转速, 使拉力增大,相应减小电机 1转速,使拉力减小,同时保持其它两个 电机转速不变,反扭矩仍然要保持平衡。按图 b的理论,飞行器首 先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以 实现飞行器的前飞运动。向后飞行与向前飞行正好相反。(在 图 b 图 c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿 x、y 轴的水平运动。) (6)倾向运动:在图 f 中,由于结构对称,所以倾向飞行的工作 原理与前后运动完全一样。
1.2 无人机的分类 无人机可按飞行平台构型、用途、尺度、活动半径、任务高度 等方法进行分类。 按飞行平台构型分类:固定翼、旋翼机、无人飞艇、伞翼无人 机、扑翼无人机。 按用途分类:军用和民用两大类 按尺度分类(民航法规):微型(空机质量小于等于7Kg的无人 机)、轻型(空机质量大于7Kg,小于等于116kg)、小型(空机质 量小于等于5700kg)、大型无人机(空机质量大于5700kg)。
多旋翼飞行器 F4飞控+4合1电调说明书
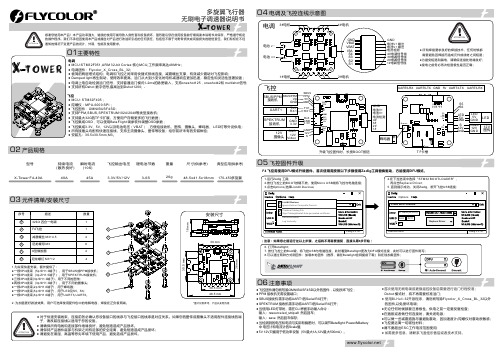
*图片仅供参考,产品以实物为准1.为实现快速安装,额外提供了:●一根5Pin线束(5p SH1.0端子),用于SBUS或PPM接收机;●一根3Pin线束(3p ZH1.5端子),用于SPEKTRUM接收机;●三根3Pin线束(3p SH1.0端子),用于不同的图传;●两根3Pin线束(3p SH1.0端子),用于不同的摄像头;●一根2Pin线束(2p SH1.0端子),用于蜂鸣器;●一根5Pin线束(5p SH1.0端子),用于LED及S5,S6;●一根6Pin线束(6p SH1.0端子),用于UART3,UART6。
2. 为加强更好滤波效果,用户可选择使用配件包中的电解电容,焊接在正负极两端。
持续电流(散热良好)瞬时电流(10S)飞控输出电压尺寸(供参考)重量锂电池节数型号典型应用(供参考)X-Tower F4-40A 40A45A3-6S170-450多旋翼3.3V/5V/12VF4 飞控需使用DFU模式升级固件。
首次使用需按照以下步骤使用Zadig工具替换驱动,方能使用DFU模式。
(注意:如果您之前运行过以上步骤,之后将不再需要重复,直接从第6步开始)● 飞控固件请勿刷写除OMNIBUSF4SD以外的固件,以免损坏飞控;● PPM 接收机无需设置端口;SBUS接收机需手动将UART1的Serial RX打开;●SPEKTRUM 接收机需手动将UART3的Serial RX打开;●当使用LED灯带时,需在CLI界面手动输入命令:●输入:resource led_strip a8 然后回车;输入:save 然后回车保存;当检测到的电压和电流与实际有偏差时,可以调节Betaflight-Power&Battery●中 电压计和电流计的Scale值;●只能用于低功率设备(最大,最大)。
5V12V5V1A12V500mA●首次使用无刷电调或更换遥控设备后需要进行油门行程校准;Dshot 模式时,将不再需要校准油门;● 使用BLHeli-开源程序,32请勿刷写除Flycolor_X_Cross_BL_32以外的固件,以免损坏电调;●无论任何时候都要注意极性,供电之前一定要反复检查;●在插拔或者做任何连接时,请关闭电源;●可以做一些减震措施尽量避免震动,因加速度计/陀螺仪对震动很敏感;●飞控要远离一切磁性材料;●请不要超出工作电流范围使用ESC;● 如需更多信息,请联系飞盈佳乐售后或者技术支持。
民用多旋翼无人机系统试验方法

民用多旋翼无人机系统试验方法1. 静态试验在进行动态试验前,需要进行静态试验。
在静态试验中,需要检查飞行器每个部件的功能和性能,确保其能够正常工作。
静态试验包括以下内容:(1)检查电池的电量和电压。
(2)检查控制器、传感器和执行器等是否正常工作。
(3)检查传感器的准确度和稳定性。
(4)检查无线通信系统的可靠性和稳定性。
2. 悬停试验在进行悬停试验前,需要将飞行器放置在宽敞平整的场地上,确保周围没有障碍物。
在悬停试验中,需要测试飞行器的飞行性能和悬停能力。
(1)首先,将飞行器连接到遥控器,确保连接正常。
(2)然后,将飞行器升空并逐渐使其悬停在空中,观察飞行器的悬停能力是否(3)接下来,运用遥控器控制飞行器进行左右移动、前后移动和旋转等动作,观察飞行器的响应和稳定性。
3. 飞行试验在进行飞行试验前,需要选择一个适宜的场所,确保没有障碍物或危险因素。
在飞行试验中,需要测试飞行器的飞行稳定性、垂直和水平速度、航行距离和飞行高度等。
(1)将飞行器连接到遥控器,先进行短距离的飞行测试,观察飞行器的飞行稳定性和悬停能力。
(2)然后进行长距离飞行测试,观察飞行器的航行距离和飞行高度等。
(3)接下来,进行一系列特殊模式的测试,例如自动降落、自动起飞等,检测飞行器的功能和性能。
4. 故障模式试验在进行故障模式试验时,需要模拟几种不同的故障模式,以检测系统的反应和稳(1)模拟飞行器的电量耗尽情况,观察飞行器的反应。
(2)模拟传感器故障或失效,观察飞行器的稳定性和响应。
(3)模拟执行器故障或失效,观察飞行器的控制能力。
在所有试验过程中,需要记录数据并分析结果。
这些数据包括飞行器的电量、飞行高度、飞行速度、姿态和位置数据等。
基于这些数据,可以进行进一步的分析,并对系统进行优化和改进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.无桨调试与有桨调试
4
2.有桨调试主要内容 (1)安装螺旋桨,根据电机转向正确的安装螺旋桨。 (2)限制飞行器,将飞行器放在安全防护网内试飞,或通过捆绑的方式限制飞行器。飞行
器第一次试飞可能会出现各种意外情况,通过防护网或捆绑可以有效的保护人员和设备安全。 (3)飞行测试,通过飞行状态检验飞行器是否正常。
一、多旋翼无人机调试概述
2. 调试步骤
5
电动多旋翼无人机调试内容主要为软件部分的调试,其调试步骤大致如下:
软件部分 调试内容
飞控系统调试 遥控器和接收机调试 动力系统调试
飞控固件的烧写 各种传感器校准 飞控相关参数的设置
电调调参等内容
对码操作 遥控模式设置 通道配置 接收机模式选择 模型选择和机型选择 舵机行程量设置 中立微调和微调步阶量设置 舵机相位设置 舵量显示操作 教练功能设置 可编程混控设置
第四章 多旋翼无人机的调试
2
目录
第一节 多旋翼无人机调试概述 第二节 多旋翼无人机飞控调试 第三节 多旋翼无人机遥控器和遥控接收机调试 第四节 多旋翼无人机动力系统调试
一、多旋翼无人机调试概述
1.无桨调试与有桨调试
3
多旋翼无人机将机架、飞控系统、动力系统和通信系统等硬件组装后,为了实现无人机的 良好飞行及功能要求,必须进行合理的调试,调试工作关系着飞行性能及安全。根据调试过程 中是否需要安装螺旋桨,可分为无桨调试和有桨调试。
1.无桨调试主要内容 (1)连接所有线路,接通电源,进行首次通电测试,检查飞控、电调、电机和接收机是否
正常通电,检查有没有出现短路或断路现象。 (2)检查遥控器,进行对频及相关设置。 (3)将飞控连接到电脑,用调试软件(地面站)对飞控进行调试。 (4)接通电源用遥控器解锁飞控,推动油门检查4个电机的转向是否正确。