自动飞行控制系统概述20页PPT
合集下载
《飞机飞行控制》课件

02
人机界面必须设计得简单、直观、易操作,使飞行员能够快速
地获取飞行状态信息并发出控制指令。
人机界面也是飞行员紧急情况下进行人工操纵的通道,必须保
03
证在任何情况下都能迅速有效地发挥作用。
飞行控制系统的基
03
本原理
飞行动力学基础
飞行动力学是研究飞 行器在气动力作用下 的运动规律的科学。
飞行动力学主要研究 飞行器的飞行性能, 包括稳定性和操纵性 。
飞行控制系统硬件
飞行控制系统硬件是实现飞行控制功能的物理设备,包括传感器、控制 器、执行器等。
传感器用于检测飞机的状态参数,如姿态、速度、高度和角速度等;控 制器用于处理传感器信号并计算出控制指令;执行器用于接收控制指令
并操纵飞行控制面。
飞行控制系统硬件必须具有高可靠性和高精度性,以确保飞行的安全和 稳定。
调查结论
调查报告认为,波音公司在MCAS的设计和认证过程中存在严重失误,
同时美国联邦航空局(FAA)也未能有效监管。
波音737 MAX的飞行控制系统简介
飞行控制系统
波音737 MAX的飞行控制系统包括自动驾驶系统、飞行指引系统、机动特性增强系统等 。
MCAS系统
MCAS系统是一种自动防失速系统,旨在防止飞机机翼上的失速。当传感器检测到机翼上 的气流分离时,MCAS会自动调整机头的角度以减少机翼的失速。
它以空气动力学为基 础,研究飞行器在空 气中运动的力学规律 及其应用。
飞行控制系统的工作原理
飞行控制系
它通过接收飞行员输入的指 令,经过处理后发送控制指 令给执行机构,使飞行器按 照预定的轨迹和姿态飞行。
飞行控制系统通常由传感器、 控制器和执行机构三部分组成
飞行控制系统的历史与发展
自动飞行控制系统PPT课件
远前方的大。若迎面气流速度逐渐增大,则翼面上流速的最大值也会增大,该处的温度则要降低,因而音
速也降低。当迎面气流的速度达到某一值时,翼面上最大速度处的流速等于当地音速,此时我们把远前方的
迎面气流速度 与远前方的空气音速
M
之
cr
比 ,定义为该机的临界马赫数
。
a
18
V
第18页/共92页
Mcr
第二节 空气动力学的基本知识
路;其作用是稳定与控制飞机姿态。 • 控制(制导)回路:由稳定回路加上飞机轨迹反馈元件、放大计算装置组成飞机轨迹自动驾驶仪,并与飞
机形成的回路;其作用是稳定与控制飞机轨迹。
8
第8页/共92页
第一章 飞行原理
• 飞机控制系统的核心问题是研究由控制系统和飞行器组成的闭合回路的静、动态性能,为此必须建立控制 系统和飞行器的数学模型,其形式可以是微分方程、传递函数或状态空间表达式等。
4
第4页/共92页
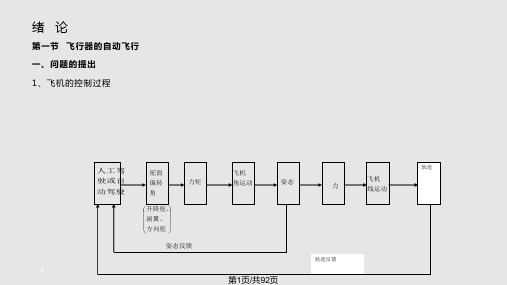
第一节 飞行器的自动飞行
二、控制面 1、控制飞行器的目的是改变飞行器的姿态或空间位置,并在受干扰情况下保持飞行器的
姿态或位置。因而必须对飞行器施加力和(或)力矩,飞行器则按牛顿力学定律产生运动。 2、作用于飞行器而与控制有关的力和力矩主要是偏转控制面(即操纵面)产生的空气动
力和力矩。一般飞机有三个控制面:升降舵、方向舵和副翼。 3、由于航空技术的发展,仅靠改善飞机的气动布局和发动机的性能难以达到对飞机性能
V a
19
Vmax a
第19页/共92页
第二节 空气动力学的基本知识
• 飞机飞行速度的范围划分如下:
• 飞行马赫数 为飞行速度与远前方空气音速之比,
时为低速飞行;
为亚音速飞行;
飞行控制系统典型飞行控制系统工作原理ppt幻灯片

分类:
因为飞机的角运动通常可以分解为绕三 轴的角运动,因而阻尼器也有俯仰阻尼器、 倾斜阻尼器及偏航阻尼器 。
❖组成:
阻尼器由角速率陀螺,放大器和舵回路 组成。舵回路中包括串联副舵机,反馈元 件,总和元件
q 速率陀螺
放大器
舵回路 阻尼器
助力器 e
阻尼系统:
❖ 阻尼器与飞机(不是飞控)构成回路(如 下图)如同是阻尼比改善了的新飞机,称 为飞机—阻尼系统,简称阻尼系统。
,称为拉平阶段
当
根轨迹进入s右半平面,系统不稳定。
,且航迹倾斜角 减小,使飞机沿曲线拉起
等效系统法(参见书p272-P273) 当
,即无一阶微分信号
❖ 侧向波束导引系统原理与下滑波束导引系统相似,不再作介绍。
都增大了,而绕纵轴的
类似高度控制系统,即俯仰角自控系统为内回路,增加空速传感器,当空速传感器换为M传感器时,就是M数自控系统
2)考虑助力器及舵回路惯性时阻尼器控制律
助力器传递函数为一阶惯性环节:
Ge (S)
1 s
1
1
舵回路传递函数为二阶环节:
G (S)
( s )2
1
2
s
1
阻尼器控制律为:
e Ge (S ) G (S ) L
LK T S 1
S
1
1
S
2
2
S
1
Td2S 2
2dTd S
1
❖ 惯频比性率环特c节 性与的大系G影3统e 响~s5截取倍止决以及频于上振率这,荡些助环环力c节节器的的,关G连舵系 接回。s频路若率惯对性1系只、1统给及 系统带来一些相移,不影响系统稳定性。
0m,提高 ,使空速向量与地平面平行―是保持段,然后减小 角,G>L,飞机飘落,滑跑。
因为飞机的角运动通常可以分解为绕三 轴的角运动,因而阻尼器也有俯仰阻尼器、 倾斜阻尼器及偏航阻尼器 。
❖组成:
阻尼器由角速率陀螺,放大器和舵回路 组成。舵回路中包括串联副舵机,反馈元 件,总和元件
q 速率陀螺
放大器
舵回路 阻尼器
助力器 e
阻尼系统:
❖ 阻尼器与飞机(不是飞控)构成回路(如 下图)如同是阻尼比改善了的新飞机,称 为飞机—阻尼系统,简称阻尼系统。
,称为拉平阶段
当
根轨迹进入s右半平面,系统不稳定。
,且航迹倾斜角 减小,使飞机沿曲线拉起
等效系统法(参见书p272-P273) 当
,即无一阶微分信号
❖ 侧向波束导引系统原理与下滑波束导引系统相似,不再作介绍。
都增大了,而绕纵轴的
类似高度控制系统,即俯仰角自控系统为内回路,增加空速传感器,当空速传感器换为M传感器时,就是M数自控系统
2)考虑助力器及舵回路惯性时阻尼器控制律
助力器传递函数为一阶惯性环节:
Ge (S)
1 s
1
1
舵回路传递函数为二阶环节:
G (S)
( s )2
1
2
s
1
阻尼器控制律为:
e Ge (S ) G (S ) L
LK T S 1
S
1
1
S
2
2
S
1
Td2S 2
2dTd S
1
❖ 惯频比性率环特c节 性与的大系G影3统e 响~s5截取倍止决以及频于上振率这,荡些助环环力c节节器的的,关G连舵系 接回。s频路若率惯对性1系只、1统给及 系统带来一些相移,不影响系统稳定性。
0m,提高 ,使空速向量与地平面平行―是保持段,然后减小 角,G>L,飞机飘落,滑跑。
飞机飞行控制课件

特点:智能化、自动化、高 精度、高可靠性
应用场景:无人机在军事、 农业、物流、救援等领域的 应用
发展趋势:智能化、网络化、 小型化、低成本化
航天飞行控制系统
航天飞行控制系 统是飞机飞行控 制系统的重要组 成部分
航天飞行控制系 统主要用于控制 航天器的姿态、 轨道和速度
航天飞行控制系 统可以保证航天 器在太空中的稳 定飞行和精确定 位
计算机技术
飞行控制计算机: 负责处理飞行控 制指令和传感器 数据
飞行控制算法: 实现飞行控制功 能,如姿态控制、 导航控制等
传感器技术:提供 飞行状态和外部环 境信息,如加速度 计、陀螺仪等
通信技术:实现飞 行控制计算机与传 感器、执行器之间 的数据传输和通信
导航技术
惯性导航系统(INS):利用陀 螺仪和加速度计等传感器测量飞 机的加速度和角速度,计算飞机 的位置和姿态。
法规限制:技术创新需要遵守相关法规 和标准,确保产品的合法性和安全性
合作与交流:加强与行业内外的合作 与交流,共同应对技术创新的挑战和 应对策略
安全保障的挑战和应对策略
挑战:飞机飞行控制系统的安全性要求 越来越高
应对策略:加强飞机飞行控制系统的测 试和验证,确保系统的稳定性和可靠性
应对策略:加强飞机飞行控制系统的安 全性设计,提高系统的可靠性和稳定性
早期的飞行控制系统20世纪源自,飞机开始使用 机械式飞行控制系统,如操 纵杆、舵面等
20世纪30年代,飞机开始 使用液压式飞行控制系统,
提高了控制精度和稳定性
19世纪末,莱特兄弟发明 了飞机,开启了飞行控制系 统的发展历程
20世纪50年代,飞机开始 使用电动式飞行控制系统,
实现了自动化控制
现代的飞行控制系统
《飞机自动飞行系统》——课件:电传飞行控制系统

一、电传飞控技术简介
(一)电传飞控技术简介
目前空客有六种型号的飞机(A319、
A320、A321和A330、A340、A380)采用
FBW,B-777和B787飞机也采用 FBW 系统。
电传飞控技术在民航中的典型性运用--A320驾驶舱
一、电传飞控技术简介
1.3电传飞行控制系统
电传飞行控制也称电传操纵,意为驾驶员指令飞机运动,而不是指令舵面偏转。
三、电传飞控的应用
(三)光传飞行控制系统
光传控制除了像电传控制一样可减轻重量,增加业载,改善可靠性和维护 性,提高性能和安全以外,在消除EMI、EMP、HIRF、火花、闪电、雷击等干 扰因素方面作用明显。Biblioteka 思 考 / THINKING
为什么在起飞和下降阶段, 坐飞机时候手机要关闭或者打 开飞行模式呢?
AIRCRAFT AUTOMATIC FLIGHT SYSTEM
Part 03
电传飞控的 应用
三、电传飞控的应用
(一)C919上的应用
目前电传飞控技术已经成为国
际各大航空制造商普遍采用的技术,
我国的C919大型客机也采用了电传
飞控技术,填补我国在大型客机领
域电传系统运用的空白。
使用了电传飞控的国产大飞机C919的驾驶体验舱
三、电传飞控的应用
(二)缺点——容易产生电磁干扰现象
电传飞行控制系统由于装载了大类的传输 电缆,容易产生电磁干扰现象。虽然目前已经采 用双绞线和屏蔽接地等技术,但尚不能完全抑制 意外的电磁和电击干扰。
三、电传飞控的应用
(三)光传飞行控制系统
用于光传输的辅助操纵系统和发动机控制系统都已研制成功并投入实践应用。 CBL(光传控制)和FBL(光传飞行控制)在民用飞机上的应用和发展始于1992 年,1996年进入实际使用,例如,MD-87飞机上采用光纤传输的副翼调整片控制 系统(TBL)和雷神公司的比奇(Beech jet 400A)飞机上采用光传输发动机控制 系统(cbl)。
飞机飞行控制课件

添加标题
添加标题
控制过程:通过传感器获取数据, 计算控制量,输出到执行机构,实 现对飞机的控制
飞机飞行控制系统的硬件组成
飞行控制系统的主要硬件设备
飞行控制计算机:负责处 理飞行控制指令和飞行数 据
传感器:包括加速度计、 陀螺仪、高度计等,用于 测量飞机的姿态、速度、 高度等参数
执行机构:包括舵机、电 动机、液压泵等,用于执 行飞行控制指令
飞行控制系统的功能
控制飞机的飞行姿态和速度
确保飞机的安全性和舒适性
添加标题
添加标题
保持飞机的稳定性和操纵性
添加标题
添加标题
提高飞机的飞行效率和性能
飞机飞行控制系统的工作原理
飞行控制系统的基本原理
飞机飞行控制系统主要由传感 器、执行器和控制器组成
传感器负责收集飞机的各种飞 行参数,如速度、高度、姿态 等
环境适应性:设计 适应各种恶劣环境 的硬件,如高温、 低温、振动等
维护与升级:定期 维护和升级硬件, 确保系统始终处于 最佳工作状态
飞机飞行控制系统的软件设计
飞行控制系统软件的功能和特点
飞行控制系统软 件是飞机飞行控 制的核心部分, 负责控制飞机的 飞行姿态、速度 和高度等参数。
飞行控制系统软 件具有高度的可 靠性和稳定性, 能够保证飞机在 各种飞行条件下 的安全飞行。
通信设备:包括无线电、 卫星通信等,用于传输飞 行控制指令和飞行数据
显示设备:包括显示器、 指示灯等,用于显示飞行 状态电力支持
飞行控制系统硬件的连接方式
传感器:用于检测 飞机的飞行状态和 参数
计算机:用于处理 传感器数据,生成 控制指令
飞行控制系统包括自动驾驶仪、飞行控制计算机、传感器、执行机构等 部分。 飞行控制系统的主要功能包括姿态控制、航向控制、高度控制、速度控 制等。 飞行控制系统是飞机安全飞行的重要保障,也是现代飞机的重要标志之 一。
第一章自动飞行控制系统概述ppt课件

数字式AFCS和计算机技术的高速发展为电传飞行控制(FBW)创 造了条件。
事实上,波音737飞机上AFCS的驾驶盘操纵(CWS)方式也是一种 电传操纵。
电传操纵又是以主动增稳控制技术发展起来的。如果不从余度和 备份手段方面去考虑,当今的自动飞行控制系统、电传操纵或电 传飞行控制系统之间很难找出明确的界限。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
自动飞行控制系统是在20世纪60年代中逐步发展起来的,70年 代是模拟式AFCS盛行的时代,80年代开始了AFCS从模拟式向数 字式过渡。
1.1
自动飞行控制系统的发展 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
20世纪60年代以前的自动驾驶仪均以舵机回路(舵机是指在自动驾驶仪中 操纵飞机舵面(操纵面)转动的一种执行部件)的稳定系统为主,配合较 少的输入指令(如转弯、升降、高度保持等)去操纵飞机。
随着计算机技术和信息综合化技术的发展,数字式的AFCS开始 和飞行管理计算机系统(FMCS)结合工作。在飞行管理计算机 统一管理下的自动飞行控制系统和自动油门配合,实现对飞机 的自动控制和对发动机推力的自动控制。
1.1.2 从自动驾驶仪到自动飞行控制系统 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
为了防止电磁干扰传输电缆,FBW(电传飞行控制)采用双绞线 和屏蔽接地等技术,但尚不能完全抑制意外的电磁和电击干扰, 在此问题上光传输具有极好的防护性能。用于光传输的辅助操纵 系统和发动机控制系统都已研制成功并投入实践应用。
事实上,波音737飞机上AFCS的驾驶盘操纵(CWS)方式也是一种 电传操纵。
电传操纵又是以主动增稳控制技术发展起来的。如果不从余度和 备份手段方面去考虑,当今的自动飞行控制系统、电传操纵或电 传飞行控制系统之间很难找出明确的界限。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
自动飞行控制系统是在20世纪60年代中逐步发展起来的,70年 代是模拟式AFCS盛行的时代,80年代开始了AFCS从模拟式向数 字式过渡。
1.1
自动飞行控制系统的发展 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
20世纪60年代以前的自动驾驶仪均以舵机回路(舵机是指在自动驾驶仪中 操纵飞机舵面(操纵面)转动的一种执行部件)的稳定系统为主,配合较 少的输入指令(如转弯、升降、高度保持等)去操纵飞机。
随着计算机技术和信息综合化技术的发展,数字式的AFCS开始 和飞行管理计算机系统(FMCS)结合工作。在飞行管理计算机 统一管理下的自动飞行控制系统和自动油门配合,实现对飞机 的自动控制和对发动机推力的自动控制。
1.1.2 从自动驾驶仪到自动飞行控制系统 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
为了防止电磁干扰传输电缆,FBW(电传飞行控制)采用双绞线 和屏蔽接地等技术,但尚不能完全抑制意外的电磁和电击干扰, 在此问题上光传输具有极好的防护性能。用于光传输的辅助操纵 系统和发动机控制系统都已研制成功并投入实践应用。
第七章 自动飞行控制系统的组成和原理

➢ 飞行控制计算机指令的计算和自动驾驶仪、飞行指引仪信号的分离情况以及 自动驾驶仪、飞行指引仪的联合使用与分开使用的情况如图7.1所示。
7.1 飞行控制计算机的自动驾驶仪指令和飞行 指引仪指令及作用
➢ 从图7.1可以看出,在自动飞行控制系统中,如果自动驾驶仪和飞行指引仪都处于接 通状态,且自动驾驶仪正在正确地控制飞机,则飞机指引仪的指引杆就应该处于中心 位置。所以,在自动驾驶仪和飞行指引仪都接通的情况下,飞行员通过观察指令杆的 移动及驾驶仪的运动方向可以监控自动驾驶仪工作是否正常。如果自动驾驶仪没有接 通,而只接通了飞行指引仪,飞行员就可以跟随指令杆的指令人工操纵飞机。
➢ 由于以上的原因,再加上计算机技术和电子技术的发展,以及飞机自动化程 度的提高,目前,大多数大中型飞机上,自动驾驶仪系统和飞行指引仪系统 共用一个计算机。
➢ 该计算机根据机组选择的工作方式和设定的目标轨迹,统一计算自动驾驶仪 的输出指令和飞行指引仪的输出指令,并将自动驾驶仪的输出指令输送到自 动驾驶仪伺服系统,驱动飞机操纵面的偏转实现对飞机姿态的控制;将飞行 指引仪的输出指令输送到姿态指引指示器用于驱动指令杆。
图7.4 AFCS 的控制组件在驾驶舱内的安装位置
7.2.2 AFCS的主要显示组件安装位置
➢ 自动飞行控制系统的主要显示组件有机长和副驾驶仪表板上的显示器,机长 和副驾驶仪表板上的自动飞行状态通告牌(ASA),机长和副驾驶仪表板上的 自动着陆警告灯,以及机长仪表板上的安定面失去配平警告灯。如图7.5式所 示。
➢ 自动驾驶仪输出的指令用于驱动自动驾驶仪某一个通道的舵机,进而控制飞 机的某一套舵面,从而改变飞机姿态或航向,在姿态或航向改变后,在飞机 空气动力学的作用下,飞机向目标轨迹运动,并最终稳定在目标轨迹上。