电液比例位置控制系统建模与仿真
水轮机筒阀电液同步控制系统数学建模与仿真
水轮机筒阀电液同步控制系统数学建模与仿真1. 引言嘿,朋友们!今天咱们聊聊一个非常酷的主题,那就是水轮机筒阀电液同步控制系统。
听起来复杂,但其实就像做饭一样,只要掌握了步骤,就能做出美味的菜肴。
水轮机,这个名字一听就知道是跟水打交道的东西,简单来说,它就像是大自然的动力工厂,利用水流来发电。
筒阀嘛,简单点说,就是水流的“开关”,它能控制水的流动,咱们今天的目标就是让这个“开关”与电液系统协同工作,达到最优效果。
2. 数学建模2.1 模型的建立首先,咱们得从建模开始。
数学模型就像是这个系统的“身份证”,没有它,系统就无法运转。
我们需要定义几个关键参数,比如水流速、压力,以及筒阀的开度。
这些参数就像是乐队的乐器,各自演奏自己的旋律,但最终得和谐地结合在一起。
就像煮汤,如果火候不对,味道肯定不行。
咱们的目标是建立一个精确的数学模型,能够反映出这些参数之间的关系。
数学模型的建立过程并不简单,首先得用一些基础方程来描述水流的运动,比如连续性方程和动量方程。
听起来有点复杂,但别担心,只要你有耐心,逐步来,总能找到答案。
可以想象成拼拼图,最初的几片可能很难对上,但随着拼图的逐步完善,最后的画面就会展现出它的美丽。
2.2 关键方程的推导接着,我们要推导出几个关键方程。
这些方程就像是我们的“秘密武器”,能够帮助我们解决各种问题。
比如说,如何计算筒阀的开度对水流速的影响。
这就需要运用到流体力学的一些基本原理,虽然听起来有点高深,但其实就像是在观察小溪里的水流,你只需关注水流的变化,慢慢摸索其中的规律。
建立好数学模型后,咱们就能进行仿真了。
仿真就像是在计算机上演一场精彩的舞台剧,所有的角色都得恰如其分。
通过仿真,我们可以预测系统在不同情况下的表现,避免了实地测试中可能遇到的各种麻烦。
就好比你在家里练习做菜,总能发现那些“意想不到的惊喜”。
3. 仿真分析3.1 仿真结果的解读仿真完成后,咱们得仔细分析结果。
结果就像是小孩子的成绩单,得一分就得一分,看能不能考出个好成绩。
电液速度控制系统建模与仿真

引言液压伺服系统是以液体压力能为动力的机械量(位移、速度和力)自动控制系统按系统。
控机械量的不同,它又可以分为电液位置伺服系统、电液速度伺服控制系统和电液力控制系统三种。
电液控制系统的基本元件包括电磁阀、电液开关控制阀、光电耦合器、功率放大器、电—机械转换器、普通电液伺服阀(频宽数十赫)、高频电液伺服阀(国内产品 400 赫)、电液比例流量阀、电液比例压力阀、电液比例方向阀、电液复合阀、电液比例泵、电液通断控制阀、电液数字阀、电液数字缸、电液数字泵等。
它们广泛用于机床工业、冶金工业、船舶工业、煤炭工业和工程机械等的控制系统中。
本文要研究的是电液速度控制系统及其仿真分析,是对电液速度控制系统的各个环节进行了数学模型的建立,并应用Matlab/Simulink对电液速度控制系统进行了仿真分析,通过幅频特性和相频特性的变化得到数学模型中各个部分对整个控制系统的影响。
1 绪论液压控制是液压技术领域的重要分支。
近20年来,许多工业部门和技术领域对高响应、高精度、高功率—重量比和大功率液压控制系统的需要不断扩大,促使液压控制技术迅速发展。
特别是控制理论在液压系统中的应用、计算及电子技术与液压技术的结合,使这门技术不论在元件和系统方面、理论与应用方面都日趋完善和成熟,并形成一门学科。
目前液压技术已经在许多部门得到广泛应用,诸如冶金、机械等工业部门及飞机、船舶部门等。
我国于50年代开始液压伺服元件和系统的研究工作,现已生产几种系列电液伺服产品,液压控制系统的研究工作也取得很大进展。
1.1电液控制技术的发展及趋势液压技术的发展与流体力学理论研究相互关联。
自1650年帕斯卡提出静态液体中的压力传播规律--帕斯卡原理以来,1686年牛顿揭示了粘性液体的内摩擦定律,18世纪建立了流体力学的连续性方程。
这些理论的建立为液压技术的发展奠定了理论基础。
从1795年,英国人首先制造出世界上第一台水压机起,液压传动开始进入工程领域。
研究有关电液比例阀控液压调平系统设计与仿真
高技术的现代战争要求地面雷达具有良好的机动性能。
雷达天线车的快速架设、调平和撤收系统是雷达的重要系统之一,直接影响到雷达的机动性能。
电液比例控制技术填补了开关液压控制技术与伺服控制技术之间的空白,已成为液压技术中最富活力的分支。
把电液比例阀控技术成功地应用雷达车调平系统中,对于提升雷达机动性能具有重要的意义。
本文所介绍的电液比例阀控液压自动调平系统,采用了比例多路阀控制,多个调平支腿执行元件可以实现不受负载约束的无级调速控制,这是实现高效调平性能的关键。
1 调平系统特点某雷达天线车自重45 t,要求工作状态时天线水平基准小于3’,整车展开并完成调平的时间控制在2 min以内。
雷达车采用四点支撑实现系统调平的方式。
系统设计采用液压作为动力源,由电机一液压泵驱动,通过液压控制阀控制四条液压支腿的升降运动,将天线车由运输状态转架为正常工作状态,并保持水平状态的稳定。
要实现本系统的功能有两个关键技术需要解决:一是调平支腿的性能问题;二是驱动控制方式和控制策略问题。
本系统方案摒弃了常规的开关阀控设计,采用性能更为先进的电液比例控制技术,提升液压系统执行机构的控制性能,实现多个执行元件同时相互独立地在不同的速度和压力下工作,使得调平控制更为灵活,实现柔性的控制策略;功能上解决了落地检测的问题,实现了一键式调平的全自动功能,有效地保证了调平时间指标的实现。
调平支腿采用带抱闸制动功能的液压马达驱动滚珠丝杆的结构设计,机械效率高,承载能力强,满足了大吨位雷达车的使用要求;通过专门研制的液压马达制动控制阀集成模块对调平支腿实施驱动和控制。
该设计方案在满足系统要求的前提下,具备了技术的先进性,同时具有很好的通用性和可扩展性。
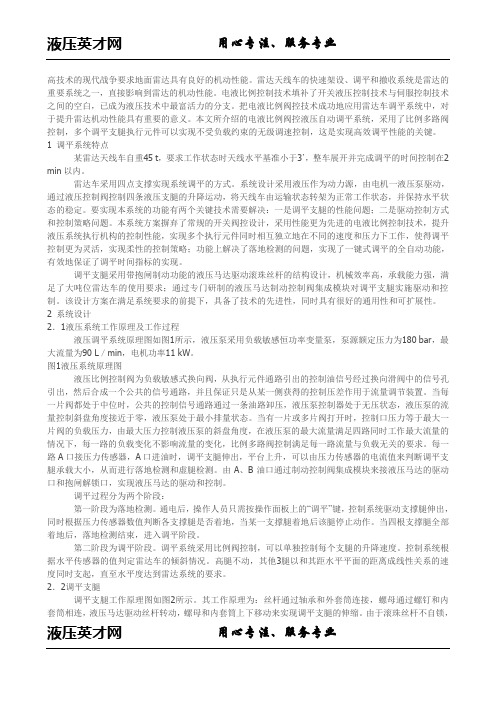
2 系统设计2.1液压系统工作原理及工作过程液压调平系统原理图如图1所示,液压泵采用负载敏感恒功率变量泵,泵源额定压力为180 bar,最大流量为90 L/min,电机功率11 kW。
图1液压系统原理图液压比例控制阀为负载敏感式换向阀,从执行元件通路引出的控制油信号经过换向滑阀中的信号孔引出,然后合成一个公共的信号通路,并且保证只是从某一侧获得的控制压差作用于流量调节装置。
电液比例位置系统控制的simulink仿真

Fm+Y(s)
_
Xv(s)
图2-2
_
Y(s)ΔpxFRf+
Xv(s)
图2-3
Xv(s)+Xp(s)
_
Ff
图2-4
3、基于MATLAB的常规PID控制simulink仿真
Matlab-Simulink仿真框图如图(3-1)所示
图3-1 控制系统的仿真框图
KfR:比例阀反馈杆的反馈系数,数值及单位1000N/m;
先导阀位移转换为压力差环节Δpx=Kp3Y
Kp3:先导液桥压力增益,数值及单位6× pa/m;
压力差传化为输出力的环节:FRf=ΔpxAc;
Ac:主阀控制腔液压作用面积7.065× ;
将力转化为主阀芯位移的环节:m2 +cx +Ksx =FRf Fx
3.3系统的瞬态响应分析
该系统的单位阶跃响应用matlab仿真得到,如图3-4所示:
图3-4 系统的单位阶跃响应
得到瞬态响应的主要指标有:
上升时间 : ;
峰值时间 : ;
最大超调量 : ;
调整时间 : ;
震荡次数 : 6.5
3.4对系统进行PID校正
此图为在matlab中仿真的PID控制器,如图3-5所示。可以通过改变比例环节(P)、积分环节(I)、以及微分环节(D)的系数来改善控制系统的性能。
:液压缸无杆腔活塞面积, ;
:平均活塞面积, ;
:流量增益; :流量压力增益系数;
αD:主阀的流量系数,取0.7;W:面积梯度(开口的总边长),取6.4× ;
:工作油液密度830kg/ ; :流量比, / =0.6864;k: ;
电液比例方向阀控位置系统仿真研究
电液比例方向阀控位置系统仿真研究摘 要:为了满足生产工艺的设计要求,电液比例控制系统的静态性能和动态性能往往需要进行校核,本文结合比例控制元件的特性和自动控制原理设计方法,通过参数计算建立了电液比例方向阀控位置系统的数学模型,利用MA TLAB 仿真校核比例控制系统的动态性能,实现了对系统参数的校正。
关键词:电液比例阀;数学建模;MA TLAB0 前言电液比例阀是在通断式控制元件和伺服控制元件的基础上发展起来的一种电-液控制元件,它可以接受电信号的指令,连续地控制液压系统的压力、流量和方向等参数,使之与输入信号成比例地变化。
电液比例控制技术作为连结现代微电子技术和大功率工程控制设备之间的桥梁,已经成为现代控制工程的基本技术构成之一。
与传统的电液伺服技术相比,它具有可靠、节能和廉价等明显特点,已经赢得相当广泛的应用领域。
实际应用中,为了改进和优化电液控制系统的控制特性,需要对系统进行理论分析和实验研究。
理论分析通常借助自动控制理论,为了分析便利常引入一些假设使问题简化,往往难以得到令人满意的结果;实验研究一般以建立实际系统或相似物理模型为前提,需要在时间、空间、费用等方面花费较大的代价。
相对而言,采用计算机仿真手段对电液控制系统进行研究则具有非常突出的优点[1]。
本文利用MA TLAB 仿真具有改变参数方便,与客观实际一致性好,省工省时,研究质量高的优点对比例方向阀控闭环位置系统进行了动态性能分析。
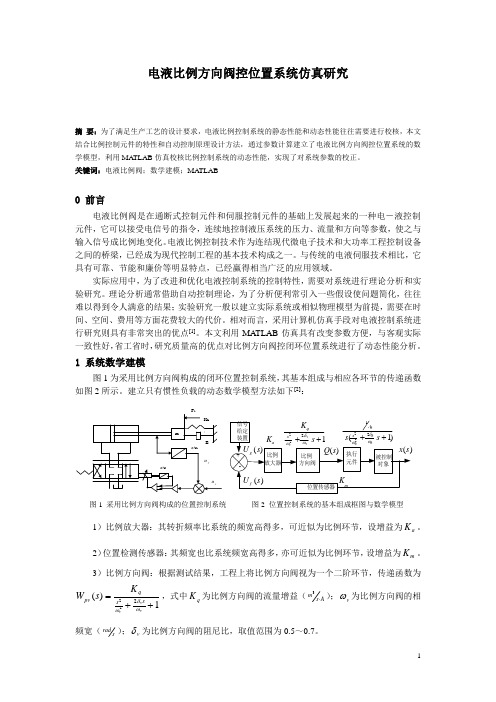
1 系统数学建模图1为采用比例方向阀构成的闭环位置控制系统,其基本组成与相应各环节的传递函数如图2所示。
建立只有惯性负载的动态数学模型方法如下[2]:1)比例放大器:其转折频率比系统的频宽高得多,可近似为比例环节,设增益为a K 。
2)位置检测传感器:其频宽也比系统频宽高得多,亦可近似为比例环节,设增益为m K 。
3)比例方向阀:根据测试结果,工程上将比例方向阀视为一个二阶环节,传递函数为1)(222++=vv vssqpv K s W ωδω,式中q K 为比例方向阀的流量增益(A s m⋅3);v ω为比例方向阀的相频宽(s rad );v δ为比例方向阀的阻尼比,取值范围为0.5~0.7。
电液比例阀控液压缸系统建模与仿真

本 文搭 建 了 比例 阀控 非 对 称 液压 缸 控 制 系统 , 建 立 了该 系 统 的数 学 模 型 ,着 重 对 阀 控 非 对 称 液 压 缸 的建 模 方 法 进 行 了研 究 ,并 利 用 Maa tb中 的 l Smuik进行 仿真 分析 ,设 计 了 PD控制 器 对 系统 i l n I
进 行校 正 。Biblioteka 2 比例 阀控 液压 缸控 制系统 的数学模型
2 1 阀控非 对称 液压 缸的数 学模 型 .
1 系 统 的 组 成 及 原 理
比例 阀控 非 对 称 液 压 缸 控 制 系 统 的硬 件 组 成 如 图 1 示 ,主要 由滤 油 器 1和 6 所 、溢 流 阀 2、液
广泛 的应 用 。
液压 缸加 载指 定 负 载 (±2 ) 0t ,位 移传 感 器 将 液 压 缸 活 塞 的位 置 信 息 通 过 数 据 采 集 卡传 递 给计 算 机 与 理想 位 移 进行 比较 ,得 出差 值 ,经 过 优 化 处 理 和转 换 输 出控 制 信 号 ,通 过 比例放 大 器 放 大 后 驱 动 电液 比例 方 向 阀工 作 ,从 而 实 现对 液 压 缸 位 置 的精 确控 制 。
n l sswi t b a d c l rt st es s m v at e d sg e I o t l r h e ut h w a h y t m d l sc r ay i t Ma l n ai ae y t i h e in d P D c n r l .T er s l s o t t e s se mo e o — h a b h e oe s h t i r c ,a d h s hg e c u a y a d b t r s b l y atrt e c l r t n e t n a ih ra c r c n et t i t f h a i ai . e a i e b o
MATLAB电液位置伺服控制系统设计及仿真教案资料
M A T L A B电液位置伺服控制系统设计及仿真数控机床工作台电液位置伺服控制系统设计及仿真姓名:雷小舟专业:机械电子工程子方向:机电一体化武汉工程大学机电液一体化实验室位置伺服系统是一种自动控制系统。
因此,在分析和设计这样的控制系统时,需要用自动控制原理作为其理论基础,来研究整个系统的动态性能,进而研究如何把各种元件组成稳定的和满足稳定性能指标的控制系统。
若原系统不稳定可通过调整比例参数和采用滞后校正使系统达到稳定,并选取合适的参数使系统满足设计要求。
1 位置伺服系统组成元件及工作原理数控机床工作台位置伺服系统有不同的形式,一般均可以由给定环节、比较环节、校正环节、执行机构、被控对象或调节对象和检测装置或传感器等基本元件组成[1]。
根据主机的要求知系统的控制功率比较小、工作台行程比较大,所以采用阀控液压马达系统。
系统物理模型如图1所示。
图1 数控机床工作台位置伺服系统物理模型系统方框图如图2所示。
图2 数控机床工作台位置伺服系统方框图数控机床工作台位置伺服系统是指以数控机床工作台移动位移为控制对象的自动控制系统。
位置伺服系统作为数控机床的执行机构,集电力电子器件、控制、驱动及保护为一体。
数控机床的工作台位置伺服系统输出位移能自动地、快速而准确地复现输入位移的变化,是因为工作台输出端有位移检测装置(位移传感器)将位移信号转化为电信号反馈到输入端构成负反馈闭环控制系统。
反馈信号与输入信号比较得到差压信号,然后把差压信号通过伺服放大器转化为电流信号,送入电液伺服阀(电液转换、功率放大元件)转换为大功率的液压信号(流量与压力)输出,从而使液压马达的四通滑阀有开口量就有压力油输出到液压马达,驱动液压马达带动减速齿轮转动,从而带动滚珠丝杠运动。
因滚珠丝杠与工作台相连所以当滚珠丝杠 运动时,工作台也发生相应的位移。
2数控工作台的数学模型 2.1 工作台负载分析工作台负载主要由切削力c F ,摩擦力f F 和惯性力a F 三部分组成,则总负载力为:a f c L F F F F ++=2.2液压执行机构数学模型工作台由液压马达经减速器和滚珠丝杠驱动。
电液比例马达速度同步控制系统建模与仿真
统 稳 定 性 同时 减 小 速 度 同 步 误差 , 引入 P I D控制环节. 仿真结 果表 明, 控 制系统引入 P I D整定环节后 , 其 稳 态 性 能
明显 提 高 , 马达 输 出速 度 稳 定 性 与 同步 性 均 有 满 意 的 设 计 效 果 . 在 同步 精 度 要 求 不 高 的情 况 下 , 基于 P L C 的 主从
第 2 2卷 第 4期
2 0 1 5年 8月
" 1 - 程 设 计 学 报 Chi n e s e J o u r n a l o f En g i n e e r i n g De s i g n
V0 1 . 22 No . 4 Aug .2 0 1 5
DOI : l O . 3 7 8 5 / j . i s s n .1 0 0 6 — 7 5 4 X. 2 0 1 5 . 0 4 . 0 0 5
电液 比例马达速度同步控制 系统建模 与仿真
杨前 明 , 孔 令 奇 , 李 健 , 王 世 刚。 , 郭 建伟
( 1 . 山东 科 技 大 学 机 械 电 子 工 程 学 院 , 山东 青岛 2 6 6 5 9 0 ; 2 . 青 岛华 海 环 保 工 业 有 限公 司 , 山东 青 岛 2 6 6 4 0 0 )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
i r v d mp o e .
Ke W o d : e e t — y r u i ; a y y rs l cr h d a l o c s mmer a Hy ru i C l d r p o o t np st n— o t l mah mai s tc il da l c y i e ; rp r o ; o i o c n r ; n i i o t e t mo e ; P D c nr l c dl I o t ; o
p o o t n lv l o c n rl t e a y r p ri a ae t o to h s mmer a y r u i yi d r p st n c n r l y tm, r d f e o d p e s r n o d f w, d d c d o t c h d a l c l e o i o — o t s se il c n i o e ei d l a r s u e a d ta l n o e u e
P o ri af Po ii n—c n r l y tm r po t on l s o — o to f S se t
LU o-i I B oj e QAN B o m n I G a- i Q AN Hu U - i
( h S c n rl r n ier g C l g, x ’n 1 0 5 C ia T e eo d A tl y E gn ei o ee ia 7 0 2 , hn ) ie n l
Hv ru i sP e mai s& S a sN . 12 1 da l n u t c c e l/ o 1 .0 1
电液 比例位置控制 系统 建模 与仿真
刘保 杰 强 宝 民 权 辉
( 第二 炮兵 工程 学 院 , 陕西 西安
摘
702 ) 10 5
要 :以 军 队 “ 10工 程 ” 持 项 目“ 压 综 合 实 验 台 ” 背 景 , 建 了 比例 阀 控 非对 称 液 压 缸 位 置 控制 系统 , 2l 支 液 为 搭 重新 定 义 了负 载 压 力 和
程 l0 m 活 塞 直 径 1 0 O 0 m, 8 mm, 塞 杆 直 径 10 m, 活 1 m 电 液 比例 方 向阀 7为 北 京 华 德 公 司 生 产 的 4 A E 0 Байду номын сангаас WR 6 2 —
精确 位置 控制 。因此 , 其进行 研究 有着 重要 的现 实意 对
义。
1 B2 N 4M 型 号 电 液换 向 阀 , 0 /4 Z / 电液 比例 方 向 阀 8为
中 图分 类 号 : H177 T 3. 文 献标 识码 : A 文 章 编 号 :1 0 — 8 3 2 1 )1 04 — 5 0 8 0 1 (0 1 1- 0 5 0
Th M o e ng n S mu ai n f El cr — y r uif e d h a d i lto o e to—h d a lc
Abtat ” 10 r et S h sp ot tm te yrui ytei s xe met e” tk h r y a akru d b i h s c: 2 po c ” te u p r e ” h dal snhs e ep r n r 1 j s i h c z i st ae team s bcgon . ul te t
负 载 流 量 , 导 出 了该 系 统 的数 学 模 型 , 利 用 M T A 推 并 A L B进 行 了仿 真 分 析 , 计 了 PD控 制 器 对 系统 进 行 了校 正 , 果 表 明 系 统 模 型 设 I 结 正 确 , 态精 度 明显 提 高 。 稳 关 键 字 :电 液 比例 ; 对 称 液压 缸 ; 置控 制 ; 学模 型 ; 真 ;I 制 非 位 数 仿 PD控
s se y t m. S mu ae . Th e u t o i l t n p o e c re t e s o h y t m t e t d l t e s b l y o h y tm s o v o sy i lt d e r s l f smu ai r v o cn s f te s s s o e ma h ma i mo e, h t i t ft e s s c a i e wa b i u l
组 成 , 图 1所 示 。液 压缸 为 上 海 立 新 液压 件 厂 生 产 如 的单 杆 活 塞 标 准液 压 缸 , 压 缸 标 准行 程 l0 m 活 液 O 0 m, 塞 直 径 10 m, 4 m 活塞 杆 直径 9 m 加 载缸 为上 海 立 新 0 m, 液 压 件 厂 生 产 的双 杆 活 塞标 准 液 压 缸 , 液压 缸 标 准 行
smU ai n i lt o
U 引 吾 随 着现 代 工业 的飞速 发 展 ,电液 比例技 术 已 广泛
应 用 于 精度 要求 较 高 的机 械 加工 、冶金 和装 备 制造 等 行 业 。在 这些 行业 中 , 多液压 设备 都需 要实 现精 确 的 很 位置 控 制 , 以获 得精 密 的工 件 和完 成 精 细 的工作 , 而采 用 电液 比例 阀组 成 的闭环 控 制 系统就 能 够很 好 的 实现