陀螺转子偏转角的测量模型
第三章-联系测量陀螺定向课件
(1)通过平硐导入高程
(2)通过斜井导入高程 (3)通过立井导入高程
2024/10/5
通过立井导入高程
2024/10/5
h=l-a+b=l+(b-a) B点在统一坐标系中的 高程
HB=HA-h
二、长钢尺导入高程
2024/10/5
用长钢尺导入高程
2024/10/5
pM HsinQ Hslin
θ为陀螺轴x轴相对于地平面仰起的角度
2024/10/5
五 陀螺经纬仪定向测量方法
(一)陀螺经纬仪定向的作业过程
1、地面已知边上测定仪器常数
假想的陀螺仪轴的稳定位置通常不与地理子午线重合,陀螺 方位角与地理方位角二者之间的夹角称为仪器常数,一般用△ 表示 。
可以按下式求出仪器常数: △=A0-αT
钢丝导入高程
三、光电测距仪导入标高
运用光电测距仪导入标高,不仅精度高,而且缩短了井 筒占用时间,因此是一种值得推广的导入标高方法。
2024/10/5
光电测距仪导入高程
2024/10/5
三 陀螺经纬仪的工作原理
• 1.地球自转及其对悬挂式陀螺仪的作用
p
2024/10/5
MsinQslin
H
H
❖ 2.陀螺仪轴对子午面的相对运动
• 地球自转的水平分量使陀螺仪轴相对于地平面高度θ发生 变化。当陀螺仪轴在子午线以东时,其向东的一端相对于 地平面上升,向西的一端下降,此时产生外力矩(重力原 因)。若陀螺仪转子处于高速运转,则根据进动效应,x 轴有回到地平面的进动趋势,即向子午面靠近。反之,陀 螺仪轴在子午线以西,也有向子午面靠近的运动,因此在 地球自传作用下,x轴形成以子午面为中心的简谐摆动, 其轨迹为一很扁的椭圆 。
加速度 陀螺仪 算倾斜角-定义说明解析
加速度陀螺仪算倾斜角-概述说明以及解释1.引言1.1 概述在现代科技发展的背景下,加速度传感器和陀螺仪成为了物理学和工程领域中极为重要的传感器之一。
加速度传感器能够测量物体在三维空间内的加速度,而陀螺仪则可以测量物体在空间中的旋转角速度。
这两种传感器的结合应用可以帮助我们更准确地获取物体的运动信息,包括物体的倾斜角度。
本文将重点介绍如何利用加速度传感器和陀螺仪来计算物体的倾斜角度,探讨这种方法在实际应用中的重要性和发展前景。
通过深入了解这些传感器的工作原理和计算方法,我们可以更好地理解和利用它们在各种领域的应用,为相关研究和工程实践提供参考和指导。
1.2 文章结构文章结构部分包括了引言、正文和结论三个大的部分。
在引言部分,我们将对加速度、陀螺仪和算倾斜角的概念进行简要介绍,说明文章的结构和目的。
在正文部分,将逐一介绍加速度的概念、陀螺仪的原理以及算倾斜角的方法,并深入分析它们之间的关系。
在结论部分,将总结加速度和陀螺仪的作用,强调算倾斜角的重要性,并展望未来发展方向。
整篇文章将以此结构为蓝本,系统地介绍加速度、陀螺仪和算倾斜角的相关知识,为读者提供全面的了解和参考。
1.3 目的本文的目的在于介绍加速度和陀螺仪在测量和计算倾斜角时的重要性和应用。
加速度和陀螺仪是现代传感器技术中常用的两种传感器,它们在航空航天、汽车工业、智能手机等领域都有着重要的应用价值。
通过深入了解加速度和陀螺仪的原理以及两者结合计算倾斜角的方法,读者可以更好地理解这些传感器的作用和原理,同时也可以认识到它们在解决实际问题中的重要性。
希望通过本文的介绍,读者能够对这两种传感器有更清晰的认识,从而为其在实际应用中的选择和使用提供一定的指导和参考。
2.正文2.1 加速度的概念:加速度是物体在单位时间内速度改变的速率。
在物理学中,加速度通常用来描述物体在运动过程中的速度变化情况。
加速度的单位是米每秒平方(m/s^2),表示每秒钟速度增加或减小的米数。
偏摆检测仪的测量原理

偏摆检测仪的测量原理偏摆检测仪是一种通过测量物体的偏移角来判断物体平衡状态的仪器。
它主要应用于工业制造和船舶导航等领域,可以提高生产精度和安全性。
下面将详细介绍偏摆检测仪的测量原理。
偏摆检测仪的测量原理主要基于陀螺效应。
陀螺效应是指旋转物体在力矩作用下的现象,即旋转物体在力的作用下会产生力矩,使其发生角度的偏转。
偏摆检测仪利用陀螺效应来测量物体的偏移角。
偏摆检测仪一般由陀螺仪、信号处理电路和显示装置组成。
陀螺仪是实现测量的核心部件,它通过旋转来产生陀螺效应。
信号处理电路用于接收、处理和放大陀螺仪输出的信号,最后通过显示装置将测量结果展示给用户。
陀螺仪中的核心元件是陀螺转子,它是一个旋转的刚体。
陀螺转子通常由一个金属球体构成,球体内有一个高速旋转的轴。
当陀螺转子旋转时,由于角动量守恒,外界施加的力会产生一个力矩,使陀螺转子发生偏离。
在偏摆检测仪中,陀螺转子通过悬挂在支架上,可以在任意方向上自由转动。
当物体发生偏移时,由于陀螺效应的作用,陀螺转子会受到力矩的作用,产生角度的偏转。
此时,陀螺仪会检测到转子的偏移角,并传递给信号处理电路。
信号处理电路会对陀螺仪输出的信号进行放大和滤波处理,以提高测量的精度和稳定性。
处理后的信号最终会通过显示装置展示出来,供用户观察和分析。
需要注意的是,偏摆检测仪的测量原理基于陀螺效应,因此在使用过程中需要保证陀螺仪的旋转速度和稳定性。
同时,由于陀螺效应与旋转速度和力矩的大小有关,所以在实际应用中,需要根据具体的测量需求选择合适的陀螺仪。
总结起来,偏摆检测仪的测量原理是基于陀螺效应,通过陀螺转子的偏转角度来判断物体的偏移情况。
它利用陀螺效应的旋转特性,将物体的力矩转化为角度的偏移,通过陀螺仪的测量和信号处理实现对偏移角的测量和分析。
这种原理在工业制造和船舶导航等领域具有重要应用价值。
一种测量陀螺转子静平衡的方法
一种测量陀螺转子静平衡的方法
田艳玲;郭立忠;赵艳琴;元春峰
【期刊名称】《计测技术》
【年(卷),期】2003(023)001
【摘要】介绍了测量陀螺转子静平衡的一种行之有效的方法,并介绍了如何进行去重.
【总页数】3页(P21-23)
【作者】田艳玲;郭立忠;赵艳琴;元春峰
【作者单位】中国航空工业第一集团公司北京长城计量测试技术研究所,北
京,100095;中国航空工业第一集团公司北京长城计量测试技术研究所,北京,100095;中国航空工业第一集团公司北京长城计量测试技术研究所,北京,100095;中国航空工业第一集团公司北京长城计量测试技术研究所,北京,100095
【正文语种】中文
【中图分类】TB93;V241.5
【相关文献】
1.陀螺转子静平衡测量方法的研究 [J], 刘国栋;刘炳国;李佳;朱效方;张琢
2.一种陀螺飞轮转子的本机动平衡方法 [J], 章晓明;于学文
3.特殊结构陀螺转子的称重静平衡方法 [J], 李丙乐;王厚生;王晖;王秋良
4.一种用于位标器陀螺转子动平衡测量的新方法 [J], 田社平;颜德田;丁国清;石猛
5.位标器陀螺转子动平衡测量的数字方法 [J], 田社平;侯丹;盛晓颖
因版权原因,仅展示原文概要,查看原文内容请购买。
北航水平对准及陀螺测角实验
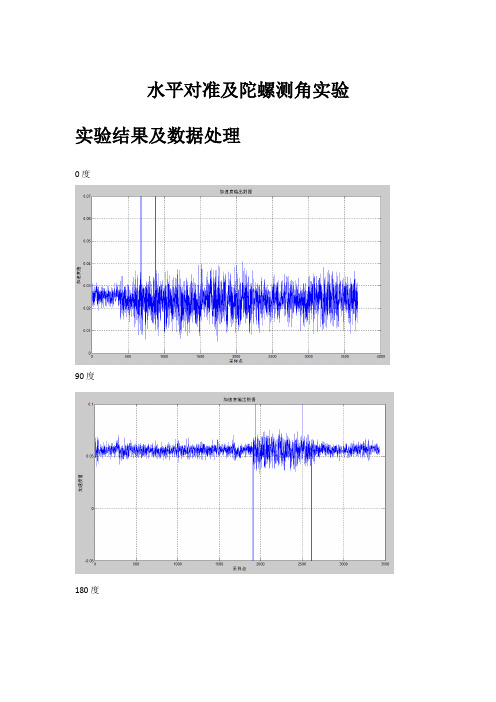
水平对准及陀螺测角实验实验结果及数据处理0度90度180度270度可以看出,在实验过程中数据较稳定,几处峰值可用作排除,取均值算出下表加速度利用相差180度的两数据依次计算得到常值偏置:利用获得的常值偏置计算实际加速度均值:设当地加速度为29.8/m s ,计算偏角:对上表数据分别用0度和180度,90度和270度进行计算,均值θ=0.00104062 度,由此可得,转台调水平后水平度非常好。
陀螺测角实验实验数据分析及处理:1、正反转测试:设置速率转台速率为:36.6deg/s :,获得数据如图所示:综合处理上述数值,由上两图可以看到,实验数据存在随即误差,应在数据处理中予以剔除:由上数据可得:陀螺零飘为-0.467164368 deg/s2、陀螺转角测试:利用获得数据,参考1部分数据处理方式,剔除粗大误差后进行计算,所得数据误差分析:在实验中,利用秒表测试转台转动的时间,同时控制数据采集的开始和停止,以转台转过一定角度作为开始和停止的信号。
实验中主要误差来源于:(1)开始、停止信号与转台转动对应角度不完全匹配,即发出停止信号时,转台可能已经超过了既定读数;(2)在开始、停止信号的同时,没有立即停止电脑端数据采集,造成获得数据过多,对应计算数据超过实际值;(3)计时误差,开始、停止计时动作与相应动作信号不完全同步。
以上三点误差为本次实验产生误差的主要原因,考虑到这些误差的存在,综合最后测试结果,可以看出,实验测试转角数据具有较高的准确度。
一、实验总结和体会:通过水平对准和陀螺测角实验,我对加速度计和陀螺仪的使用有了较多的认识,对MEMS器件有了一定的认识。
实验操作部分相对较简单,但实验原理及数据处理部分都相对较复杂,需要有较好的理解,这些对我们进一步了解陀螺仪的操作都有很大的帮助。
13_第十三章竖井联系测量与陀螺经纬仪测量2ppt课件

3、零位校正:不同的仪器有不同的校正方法 4、零位改正
第二部分 竖井联系测量与陀螺经纬仪测量
2-11 用陀螺经纬仪观测陀螺北方向的方法
其目的在于测定子午线方向 1、粗略定向
1〕两逆转点法 2〕四分之一周期法 2、精密定向 1〕跟踪逆转点法,取舒勒平均值 2〕中天法〔时间差法)
第二部分 竖井联系测量与陀螺经纬仪测量
2-7陀螺仪指北ห้องสมุดไป่ตู้原理
4 陀螺仪指北的原因 1〕陀螺仪本身的基本特性〔定轴性、进动性) 2〕地球的自转,产生重力矩 高速旋转的陀螺,其转轴与北方向存在转角,产生
进动现象,自动寻北方向。
第二部分 竖井联系测量与陀螺经纬仪测量
2-8 陀螺的运动方程
根据陀螺的运动方程,可以分析: 1〕特殊地区的陀螺仪应用现象
第二部分 竖井联系测量与陀螺经纬仪测量
2-7陀螺仪指北的原理
1 陀螺仪的结构 按陀螺仪转子所具有的转动自由度的数目分:
2〕二自由度陀螺仪
陀螺转子轴不能绕水平轴Y 旋转,只能绕X、Z轴旋转
称为陀螺罗盘仪。
Z X
Y
第九章 竖井联系测量与陀螺经纬仪测量
2-7陀螺仪指北的原理
2 陀螺仪的基本特性 1〕定轴性 高速旋转的陀螺,在没有外力矩的作用时,陀螺仪
其中, 0地 面与地下子 午线收敛角的差值。
第二部分 竖井联系测量与陀螺经纬仪测量
2-13 陀螺经纬仪的应用
由地面与地下陀螺经纬仪的观测,可以实现高精度的
定向传递:
0(m m 0)
2、陀螺经纬仪的组成: 陀螺仪 + 经纬仪 = 陀螺经纬仪
3、陀螺经纬仪在工程测量中的应用,目前主要由一 次定向精度和观测时间长度的要求选择仪器型号
一种陀螺稳定平台的角位移测量方法[发明专利]
![一种陀螺稳定平台的角位移测量方法[发明专利]](https://img.taocdn.com/s3/m/b1bbf32d89eb172dec63b77e.png)
专利名称:一种陀螺稳定平台的角位移测量方法专利类型:发明专利
发明人:张宇鹏,汪永阳
申请号:CN201711445163.0
申请日:20171227
公开号:CN108303019A
公开日:
20180720
专利内容由知识产权出版社提供
摘要:本发明提供一种陀螺稳定平台角位移的测量方法,陀螺稳定平台包括方位轴、俯仰轴、第一电容传感器和第二电容传感器,所述测量方法包括以下步骤:在方位轴上设置方位轴偏心检测弧面,以及在俯仰轴上设置俯仰轴偏心检测弧面;根据电容传感器预设的安装距离,将第一电容传感器固定在陀螺稳定平台的平台框架上以检测方位轴偏心检测弧面,并将第二电容传感器固定在陀螺稳定平台的平台框架上以检测俯仰轴偏心检测弧面;根据方位轴偏心检测弧面的第一偏心距和第一电容传感器检测到第一线位移得到方位轴的角位移,并根据俯仰轴偏心检测弧面的第二偏心距和第二电容传感器检测到第二线位移得到俯仰轴的角位移。
申请人:中国科学院长春光学精密机械与物理研究所
地址:130033 吉林省长春市经济技术开发区东南湖大路3888号
国籍:CN
代理机构:深圳市科进知识产权代理事务所(普通合伙)
代理人:赵勍毅
更多信息请下载全文后查看。
陀螺PPT课件

当陀螺仪相对于地球静止时 ,其敏感轴与地球重力加速 度平行分量重合,此时陀螺 仪输出为零。
当陀螺仪绕地球旋转时,其 敏感轴与地球重力加速度平 行分量之间产生夹角,通过 测量这个夹角可以计算出陀 螺仪相对于地球的角度变化 。
角度测量通常采用加速度计 或倾斜传感器等技术,将重 力加速度分量转换为电信号 进行测量。
成本问题
光纤陀螺仪的制造成本较 高,难以在低端市场广泛 应用。
原子陀螺仪技术展望与挑战
超高精度测量
原子陀螺仪有望实现超高精度的角速度测量,满足高精度导航等应用需求。
长期稳定性好
原子陀螺仪具有长期稳定性好的特点,适用于长时间连续工作的场景。
原子陀螺仪技术展望与挑战
• 无机械运动部件:原子陀螺仪无需机械运动部件,具有更高的 可靠性和寿命。
大动态范围
光纤陀螺仪具有较大的动态范围,适用于高速旋转等应用场 景。
光纤陀螺仪技术进展与挑战
• 抗干扰能力强:光纤陀螺仪对外部干扰具有较强 的抵抗能力,保证了测量结果的稳定性。
光纤陀螺仪技术进展与挑战
光源稳定性问题
光纤陀螺仪对光源的稳定 性要求较高,需要采取特 殊措施进行保障。
光纤环圈制造难度
高精度光纤环圈的制造难 度较大,限制了光纤陀螺 仪的进一步发展。
工作原理
当陀螺受到外力作用时,其自转轴将 绕某一定点(称为极点)作进动,且 进动角速度与外力矩成正比,而与陀 螺的转动惯量成反比。
陀螺仪组成与结构
组成
陀螺仪主要由转子、支承系统、 驱动系统、测量系统和控制系统 等组成。
结构
陀螺仪的结构形式多种多样,根 据支承方式的不同可分为液浮式 、气浮式、挠性式、静电式和磁 悬浮式等。
未来发展趋势预测与展望
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陀螺转子偏转角的测量模型
针对陀螺转子偏转角的测量,采用降维分析的方法,建立了静态模型与动态模型。
首先根据空间几何关系和坐标变换原理得出陀螺转子相关参数间的关系式,基于此推导出具有垂直关系的两个低维度偏转角测量公式,合成偏转角在三维空间中关于占空比的二元关系式;并对线性关系的条件进行了仿真分析,发现方位角在±30°内一元线性关系良好。
此种测量方法便捷、精确度较高,具有一定的应用价值。
标签:降维分析;静(动)态模型;线性度;MATLAB仿真;占空比
1 概述
从力学角度分析,陀螺转子可近似为绕一定支点的做三自由度运动的刚体,即绕其对称轴高速旋转的飞轮转子。
陀螺转子通常采用同步电机、磁滞电机等拖动方法来使其绕自转轴高速旋转,且转速近似为常值。
当陀螺转子以一定的角速度绕其自转轴旋转时,其自转轴在三维空间内相对于原自转轴位置所偏转的角度为偏转角(工程上称为方位角),广泛应用于导弹的离轴发射和制导、雷达搜索及随动、飞机船舶的航向陀螺仪等。
因此其测量精度具有至关重要的意义。
典型的陀螺转子成球台结构,在其表面涂覆有黑、白相间的条纹图案,一个黑色条纹和与其相邻的白色条纹为一组条纹,如图1所示。
工程上常采用光电传感器测量陀螺转子的方位角,光电传感器可以接收到黑、白条纹所反射的光,由于黑白条纹对信号光的反射率差异,可以定义光电传感器接收到白条纹反射光的时间与接收到该组黑白条纹反射光的时间之比为占空比k。
若陀螺转子的自转速度恒定,则占空比可以转换为光电传感器所在的平面与陀螺转子表面相交的交线在白条纹部分的弧长与在该组黑白条纹部分的弧长之比。
2 位标器的分布及基本模型的搭建
2.1 位标器分布模型
考虑到陀螺转子做三自由度的运动,其自转轴在三维空间的偏转角Φ可降成两个维度的分量,那么用一个位标器测量的占空比k必然不能反映偏转角Φ真实值作用,因此在每个独立的维度上放置位标器。
为了防止位标器分布造成的微小误差,每个维度上两个方向各放置一个位标器,位于与陀螺转子转轴垂直的同心圆上,如图1所示。
2.2 模型准备
以陀螺转子的球心为坐标原点,自转轴为X轴,建立右手坐标系。
假设在转子表面涂覆的黑、白条纹的数目均为n,则赤道圆上每个黑条纹或白条纹所对应的角度α=π/n;陀螺转子上下表面对应的球心角为Φm,如图2所示(以红色标识白条纹)。
弧DBI所在大圆可以看作是过B点的经线圆(即弧ABC所在的大圆)以OB为轴(即Y轴)逆时针旋转β角而得到的,弧DEF所在的大圆可以看作是过B点的经线圆绕X軸顺时针旋转α角而得到的。
当转子以一定的角速度绕其自转轴旋转时,自转轴会随着外界环境以球心为定点发生偏转。
若陀螺转子没有发生偏转,四个光电传感器所测得的占空比是相同的;若自转轴发生偏转,则四个传感器所测得的占空比也会发生变化,根据光电传感器测得的占空比即可计算出陀螺转子的偏转角度。
3 陀螺转子参数α、Φm和β之间的关系
模型准备里已提到,弧DBI所在的大圆(设为圆O1)可以看作是过B点的经线圆以OB为轴逆时针旋转β角而得到的,弧DEF所在的大圆可以看作是过B 点的经线圆绕X轴顺时针旋转α角而得到的。
两圆交点为D,由几何关系:
设过D点的纬度圆为圆O2,在OXYZ坐标系内,圆O2的方程为:
圆O1的坐标在OXYZ坐标系内不易直接求出,可以通过坐标变换的方法求出,设OXYZ坐标系以同样的方式旋转β角后得到的新坐标系为OX1Y1Z1,则在新坐标系内,圆O1可以表示为:
根据坐标变换原理,从坐标OXYZ到OX1Y1Z1的坐标变换矩阵可以表示为:
从而:
将式(3)代入式(2)得圆O1在OXYZ坐标系内的公式为:
联立式(4)与式(1),求得D点坐标为:
则有:
4 陀螺转子偏转角测量模型
4.1 静态模型与动态模型的建立
转子偏转角为Φ,但自转轴偏转的方向不定。
将偏转角的运动分解为一个自转轴在XOY平面的偏转角为Φ1的运动与一个自转轴在XOZ平面的偏转角为Φ2的运动,Φ1与Φ2所对应的k值由对应的两个相邻的传感器测得。
利用几何关系得Φ、Φ1与Φ2关系为:
Φ1与Φ2的求法相同,下面以求Φ1与占空比k1的关系为例,通过建立静态坐标系与动态坐标系求解。
设转子的自转轴为X’轴,建立右手坐标系O’X’Y’Z’该坐标系不随转子的运动而变,称为静态坐标系。
然后z轴不动,以z轴为轴逆时针转过一个角度Φ1,从而z轴与z′轴仍然重合,x轴与y轴相比于X’轴和Y’轴都偏转Φ1角(∠XOX’=∠YOY’=Φ1),此时旋转轴为X轴,坐标系OXYZ与转子固连,称其为动态坐标系。
为图示方便,把偏转后的陀螺转子摆正,如图3所示。
陀螺转子的自转速度恒定,则占空比k1可以转换为传感器所在的平面(圆O3)与转子表面相交的交线在白条纹部分(弧MP)的弧长与在该组黑白条纹部分(弧MN)的弧长之比,而弧MP与弧MN均在圆O3上,故弧长之比可等价为弧所对应的圆心角之比。
设弧QP在圆O1上对应的圆心角为γ,则:
γ对应弧QP,由几何关系得到,sin?酌=■,问题转化为求出点P的纵坐标。
P点坐标可以由弧EPC所对应的圆(设为圆O4)的方程与圆O3所对应的方程联立求得(在同一坐标系下)。
在此过程中,陀螺转子一直以x轴为自转轴高速旋转。
联立圆O3、圆O4在OXYZ坐标系内的方程解得交点P的坐标为:
则有:
联立式(7),得:
同理可得Φ2的表达式,联立(6)式,得出Φ与占空比k的解析关系式:。