工件的定位夹紧与夹具设计
合集下载
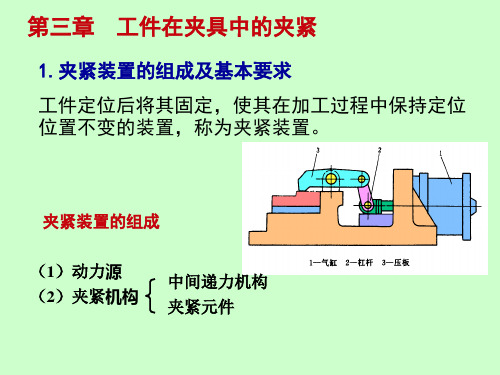
第三章-工件在夹具中的夹紧
2.液压夹紧
液压夹紧是利用液压油为工作介质来传力的 一种装置。它与气动夹紧比较,具有夹紧力稳定、 吸收振动能力强等优点,但结构比较复杂、制造 成本高,因此适用于大量生产。液压夹紧的传动 系统与普通气压系统类似。
3、气-液组合夹紧
气-液组合夹紧的动力源为压缩空气,但要使用 特殊的增压器,比气动夹紧装置复杂。它的工作原理 如图所示,压缩空气进入气缸1的右腔,推动增压器 活塞3左移,活塞杆4随之在增压缸2内左移。因活塞 杆4的作用面积小,使增压缸2和工作缸5内的油压得 到增加,并推动工作缸中的活塞6上抬,将工件夹紧。
削扭矩M 将使工件绕中心旋转,当钻头的刃带进入切削时,
产生的钻削扭矩最大,此时应为工件夹紧的最不利情况。
2.按静力平衡原理列出平衡式并计算夹紧力W
由图可知,钻削扭矩M有使工件产生转动的趋势,这 需要由夹紧力W在夹紧点所产生的摩擦阻力矩及由钻削力P 和夹紧力W所产生的支承反力在工件和定位面间产生的摩 擦阻力矩相平衡,即有平衡式:
升角:是工件上受压面与旋转半径的法线行 程的夹角。从几何关系可知,它是由转轴中心O点 和偏心几何中心C点,分别与夹紧点的连线所形成 的夹角。
P
max
e r
2)圆偏心夹紧的自锁条件
P点夹紧时能自锁,则可保证其余各点均可自锁
自锁条件 αmax ≤ 1 + 2
1-圆偏心轮与工件处的摩擦角。 2-圆偏心轮与转轴处的摩擦角。 tgαmax ≤ tg e/r ≤ , 取μ=0.1~0.15,
M / Q/ l
/
QL Q/ l
M M/
Q/ Q L l
N N
H1
H2 F1
F2
W
W
Q// H2 F2 W H1
定位、夹紧、夹具设计步骤

因此,按照工件加工要求确定工件必须限制 的自由度数是工件定位中应解决的首要问题。
四、定位的分类
四、定位的分类 1、完全定位
大端面限制: X 方向的移动自由度 Y、Z的转动自由度 短销限制: Y、Z方向的移动自由度
防转销限制: X 方向转动自由度
四、定位的分类 1、完全定位 完全定位的概念: 六个自由度均被限制的定位方式称为完全定位。
夹紧和定位是两个概念
第六节:六点定位原则和定位基准的选择 一、六点定位原则:
一、六点定位原则:
六点定位原理 是指用六个适 当分布支承点来 分别限制工件的 六个自由度,从 而使工件在空间 得到确定定位的 方法。
六点定位原理的两点说明 1、六点支承点必须适当分布
三个支承点在一直线上, 没有限制三个自由度
四、定位的分类 3、过定位
重复限制: Y、Z 方向转动自由度
夹持较长卡盘相关于套筒限制: Y、Z方向的移动自由度 Y、Z的转动自由度
一夹一顶 夹持部分较长
顶尖限制: Y、Z 方向转动自由度
四、定位的分类 3、过定位的概念:
某一个自由度同时由多于一个的定位元件来 限制,这种定位方式称为过定位。
四、定位的分类 举一反三 考考你
欢迎大家学习机制工艺课
上节课 回顾
一、工件定位的概念: 定位 在加工前,先确定工件在工艺系统中的正确位置。
实际加工中,只要考虑作为设计基准的点、 线、面 是否在工艺系统中占有正确的位置。
上节课 回顾
二、定位与夹紧: 夹紧 在加工过程中,为防止工件在切削力、重力、惯性 力等的作用下发生位移或振动,以免破坏工件定位。
(3)自位支承:定位支承点的位置随工件定 位基准位置变化而自动与之适应的定位元件, 称为自位支承。 自位支承一般只起一个定位支承点的作用。
第三章 工件的夹紧及夹紧装置(夹具设计)
2.偏心夹紧机构-夹紧特点 圆偏心夹紧机构结构简单,操作方便,动作迅
速,但自锁能力较差,增力比小,(取决于L/ρ的 比值)。常用在切削平稳且切削力不大的场合。
机械学院
第二节 基本夹紧机构
2.偏心夹紧机构-适用范围
几种常见偏心夹紧机构
机械学院
第二节 基本夹紧机构
3.螺旋夹紧机构-分类
直接夹紧式螺旋夹紧机构:拉紧式和压紧式 移动压板式螺旋夹紧机构:支点式和内嵌式 铰链压板式螺旋夹紧机构:遮盖式、杠杆式、翻转式、联动式 可拆卸压板式螺旋夹紧机构:直拆式和旋拆式
机械学院
移动式压板端面偏心轮夹紧机构
移动式压板端面偏心轮夹紧机构:主要由两个端面凸轮在不同的旋 转角度上产生的轴向位移来实现夹紧动作。它的结构简单、紧凑, 占用空间小,操作方便,但自锁性能差一些,因此,其夹紧行程受 到一定限制。
机械学院
转动式压板端面偏心轮夹紧机构
转动式压板端面偏心轮夹紧机构:主要由端面凸轮和滑动杆在转动 一定角度时产生的位移来实现夹紧动作。它的结构也比较简单,操 作方便,由于是利用杠杆原理进行夹紧,其夹紧力比较大,但占用 的空间要大一些。
夹紧力作用点的选择
2)作用在工件刚度高的部位
机械学院
第一节 夹紧机构原理
3.确定夹紧力的基本原则
夹紧力的作用点与工件变形 a)工件底面产生夹紧变形 b)改进方案
机械学院
第一节 夹紧机构原理
3.确定夹紧力的基本原则
夹紧力作用点的选择
3)夹紧力的作用点和支承点尽可能靠近切削部位,以提高工件 切削部位的刚度和抗振性。
机械学院
第二节 基本夹紧机构
6.斜楔夹紧机构-适用范围
斜楔夹紧装置常用在尺寸公差较小的夹紧装置中,主要用 于机动夹紧,且毛坯质量较高的场合。
速,但自锁能力较差,增力比小,(取决于L/ρ的 比值)。常用在切削平稳且切削力不大的场合。
机械学院
第二节 基本夹紧机构
2.偏心夹紧机构-适用范围
几种常见偏心夹紧机构
机械学院
第二节 基本夹紧机构
3.螺旋夹紧机构-分类
直接夹紧式螺旋夹紧机构:拉紧式和压紧式 移动压板式螺旋夹紧机构:支点式和内嵌式 铰链压板式螺旋夹紧机构:遮盖式、杠杆式、翻转式、联动式 可拆卸压板式螺旋夹紧机构:直拆式和旋拆式
机械学院
移动式压板端面偏心轮夹紧机构
移动式压板端面偏心轮夹紧机构:主要由两个端面凸轮在不同的旋 转角度上产生的轴向位移来实现夹紧动作。它的结构简单、紧凑, 占用空间小,操作方便,但自锁性能差一些,因此,其夹紧行程受 到一定限制。
机械学院
转动式压板端面偏心轮夹紧机构
转动式压板端面偏心轮夹紧机构:主要由端面凸轮和滑动杆在转动 一定角度时产生的位移来实现夹紧动作。它的结构也比较简单,操 作方便,由于是利用杠杆原理进行夹紧,其夹紧力比较大,但占用 的空间要大一些。
夹紧力作用点的选择
2)作用在工件刚度高的部位
机械学院
第一节 夹紧机构原理
3.确定夹紧力的基本原则
夹紧力的作用点与工件变形 a)工件底面产生夹紧变形 b)改进方案
机械学院
第一节 夹紧机构原理
3.确定夹紧力的基本原则
夹紧力作用点的选择
3)夹紧力的作用点和支承点尽可能靠近切削部位,以提高工件 切削部位的刚度和抗振性。
机械学院
第二节 基本夹紧机构
6.斜楔夹紧机构-适用范围
斜楔夹紧装置常用在尺寸公差较小的夹紧装置中,主要用 于机动夹紧,且毛坯质量较高的场合。
工件的装夹和夹具

B
Omax
O Omin
D
+TD 0
A
d
0 -Td
轴最细,孔最大
3) 当定位孔与心轴(或定位销)任意边接触时(心轴垂直放置)时。
ΔH3
=2 (Rmax-r1min)+rmax-rmin;
= Dmax-d1min+Td/2=TD+Td1+Δmin+Td/2
轴最细,内孔最 大,外圆最大
正确位置
b
轴最细,孔最大 ,外圆最小
1)、在长方体工件上铣通槽
2)、在长方体工件上铣不通槽
Z O
X Y
应 该限制 五个 自由度: Y; Z; X; Y; Z;
不完全定位
应该 限制六个自由度 : X ;Y;Z; X ;Y;Z;
完全定位
3)、在球面上铣平面
4)、在车床上车外圆
Z O
X Y
应该限制一个自由度: Z
不完全定位
应该 限制四个自由度: Y ; Z ;Y ; Z ;
b)
Y;Z
Y;Z
c)
顶尖限制:
X Y、Z 方向转动自由度
4)连杆加工
Z X
Z X
X Y b) Z
X
X Y
Z X
b1)
X Y
X Y
b2) 图2-23b 过定位示例分析
b3)
5)圆柱件钻孔
Z
X
X Y c) X
X
Z X
X
Y
Z
c’)
Y c1)
图2-23c 过定位示例分析
六、 定位误差
1. 定位误差的概念
工序尺寸方向与接触点和销子中心连线方向相同,则其定
机械制造工艺学——工件的装夹及夹具设计
项合并使用,即: δ装夹+δ对定<= 2T/3
特点:易于保证定位精度,装夹所用时间短夹具装夹过程
(二)夹具装夹误差 因采用夹具装夹,而造成加工表面的尺寸、
位置误差称为夹具装夹误差。 夹具装夹误差由三个方面的误差组成:
工件装夹误差δ装夹
对定误差δ对定
过程误差δ过程
(1)工件装夹误差δ装夹:与工件在夹具中装 夹有关的加工误差。
包括:定位误差δ定位: 工件在夹具中定位不准确所造成的加工误差。
夹紧误差δ夹紧:夹紧时,因工件或夹具 变形所造成的加工误差。
(2)对定误差δ对定:与夹具相对于刀具及 切削成形运动有关的加工误差。
包括:对刀误差δ对刀:夹具相对于刀具位 置有关的加工误差。
夹具位置误差δ位置:夹具相对成形运动 位置有关的加工误差。
(一)直接装夹:工件定位基准面与机 床上的装夹面紧密帖合而定位,进而夹 紧的装夹方式称为直接装夹。
(二)找正装夹:以工件的有关表面或专 门划出的线痕作为定位的依据,然后夹 紧工件的装夹方式称为找正装夹。
(三)夹具装夹:先根据工件某一工序的加工 要求设计、制造夹具,工件定位基准面与夹 具上的定位面紧密帖合而定位,然后夹紧的 装夹方式称为夹具装夹。
第二章 工件的装夹及夹具设计 2-1 概述
一、装夹的概念 装夹:将工件在机床或夹具上定位、夹紧的
过程称为装夹。 定位:工件在机床或夹具上占据正确位置
的过程称为定位。 夹紧:为保持工件的正确定位而将工件夹
牢的过程称为夹紧。
工件夹紧时可以 先定位,后夹紧 也可以 定位和夹紧同时进行
二、装夹的方法:共有三种
(3)过程误差δ过程:与加工过程中一些因 素有关的加工误差。
加工误差不等式:为了得到合格产品,上述 各项误差之和应小于等于公差T,即:
六点定位原理

XZXZ
一个长定位套
XZ
XZXZX Z X Z
典型定位元件得定位分析
定位情 况
锥
圆顶
尖
锥
和 锥
图示
度
孔心
轴
限制的
自由度
固定顶尖
XYZ
浮动顶尖
锥度心轴
YZ
XY ZY Z
定位原理分析例一
解:定位分析 :
心轴得大端面限制得自由度为:
Y 、X 、Z
心轴得长銷限制得自由度为:
X 、Y 、X 、Y
支承板定位,限制工件得三个自由度: Y 、X (、保Z 证各孔
得轴心线垂直于工件底面);
两支承销定位,限制工件二个自由度: Z 、(Y保证工件二
小孔得位置尺寸H); 削边销定位,限制一个自由度: X(保证工件二小孔与大
孔中心得对称位置尺寸A)。
属于完全定位,且能保证工件得加工精度要求,方案正确。
未受约束得刚体,在空间得位置就是不确定得,它具有六
个自由度:
X
、Y
、Z
、X
、Y
、Z。为使刚体在空间具有确定得
位置,就必须限制其六个自由度。
定位就就是用各种形状不同得定位元件,来限制工件得
自由度。
六点定位原理:用六个支承点分别限制工件得六个自由
度从而使工件在夹具中得到正确加工位置得方法称为六点定 位原理、
过定位一般就是不允许得。
过定位分析
、Z X
X
Y
Z
a)
X
X Y
a2)
Z X
X Y
Z X
a1)
X Y
a3)
过定位
消除过定位及其干涉得途径:
1、 改变定位元件结构,消除对自由度得重复 限制,如长销改成短销;
工件在夹具中的定位与夹紧

1)选择不加工面为粗基准 2)合理分配加工余量的原则 3)便于工件装夹原则 4)同方向上粗基准不得重复使用
(3)精基准的选择
主要应保证加工精度和装夹方便
选择精基准一般应遵循以下原则:
1)基准重合原则
设计(工序)与定位
2)基准统一原则
各工序的基准相同
3)互为基准原则
两表面位置精度高
4)自为基准原则
加工余量小而均匀
考虑定位方案时,先分析必须消除哪些自由度, 再以相应定位点去限制。
(3)欠定位与过定位
工件应限制的自由度未被限制的定位,为欠定位, 在实际生产中是绝对不允许的。
工件一个自由度被两个或以上支承点重复限制的 定位称为过定位或重复定位。一般来说也是不合 理的。
过定位造成的后果: (1)使工件或夹具元件变形,引起加工误差; (2)使部分工件不能安装,产生定位干涉(如一面两销)
六点定位原理。
实际中一个定位元件可体现一个或多个支承点, 视具体工作方式及其与工件接触范围大小而定
定位与夹紧的区别: 定位是使工件占有一个正 确的位置,夹紧是使工件保持这个正确位置。
(2)完全定位与不完全定位 工件的六个自由度被完全限制的定位称完全定位, 允许少于六点的定位称为不完全定位。 都是合理的定位方式。
(2)夹紧力作用点的确定 1)夹紧力应作用在刚度较好部位
2)夹紧力作用点应正对支承元件或位于支承元件
形成的支承面内
3)夹紧力作用点应尽可能靠近加工表面
(3)夹紧力大小的估算
夹紧力的大小根据切削力、工件重力的 大小、方向和相互位置关系具体计算,并 乘以安全系数K ,一般精加工K =1.5~2, 粗加工K = 2.5~3。
向上的变动量。由工件定位面和夹具定位元件的制造误差 以及两者之间的间隙所引起。
(3)精基准的选择
主要应保证加工精度和装夹方便
选择精基准一般应遵循以下原则:
1)基准重合原则
设计(工序)与定位
2)基准统一原则
各工序的基准相同
3)互为基准原则
两表面位置精度高
4)自为基准原则
加工余量小而均匀
考虑定位方案时,先分析必须消除哪些自由度, 再以相应定位点去限制。
(3)欠定位与过定位
工件应限制的自由度未被限制的定位,为欠定位, 在实际生产中是绝对不允许的。
工件一个自由度被两个或以上支承点重复限制的 定位称为过定位或重复定位。一般来说也是不合 理的。
过定位造成的后果: (1)使工件或夹具元件变形,引起加工误差; (2)使部分工件不能安装,产生定位干涉(如一面两销)
六点定位原理。
实际中一个定位元件可体现一个或多个支承点, 视具体工作方式及其与工件接触范围大小而定
定位与夹紧的区别: 定位是使工件占有一个正 确的位置,夹紧是使工件保持这个正确位置。
(2)完全定位与不完全定位 工件的六个自由度被完全限制的定位称完全定位, 允许少于六点的定位称为不完全定位。 都是合理的定位方式。
(2)夹紧力作用点的确定 1)夹紧力应作用在刚度较好部位
2)夹紧力作用点应正对支承元件或位于支承元件
形成的支承面内
3)夹紧力作用点应尽可能靠近加工表面
(3)夹紧力大小的估算
夹紧力的大小根据切削力、工件重力的 大小、方向和相互位置关系具体计算,并 乘以安全系数K ,一般精加工K =1.5~2, 粗加工K = 2.5~3。
向上的变动量。由工件定位面和夹具定位元件的制造误差 以及两者之间的间隙所引起。
夹具定位方案

4.培训与指导
-对操作人员进行夹具使用和维护的专业培训,提升其操作技能和问题处理能力。
-提供操作手册和指导资料,帮助操作人员正确使用和维护夹具。
六、结论
本夹具定位方案结合了现代自动化制造的需求和实际生产条件,以合法合规为基础,追求高精度和高效率。通过精细化的管理、严格的实施流程和定期的维护,确保夹具定位系统的长期稳定运行,为企业带来持续的生产效益。
2.定位系统设计
-采用高精度的定位元件,如定位销、定位块等,确保定位精度。
-设计定位系统时,考虑工件的装夹和释放过程,优化操作流程。
-运用计算机辅助设计(CAD)和计算机辅助制造(CAM)技术,提高设计精度和加工效率。
3.定位误差分析
-对可能的定位误差源进行分析,包括夹具制造误差、装配误差、热变形等。
夹具定位方案
第1篇
夹具定位方案
一、项目背景
随着我国制造业的快速发展,自动化设备在生产过程中的应用越来越广泛。在生产线上,夹具作为重要的辅助设备,其作用是对工件进行定位、固定,保证工件在加工过程中位置准确,提高生产效率和产品质量。然而,在实际应用中,夹具的定位问题一直困扰着许多企业。为解决这一问题,本文将结合企业实际情况,制定一份合法合规的夹具定位方案。
(1)定位方式:根据工件特点,选择合适的定位方式,如点定位、线定位、面定位等。
(2)定位元件:选用高精度、高刚性的定位元件,如定位销、定位块、定位孔等。
(3)定位误差分析:分析夹具定位过程中可能出现的误差,如定位元件的制造误差、装配误差、工件本身的形状误差等,制定相应的补偿措施。
(4)定位精度检测:采用高精度的测量仪器,对夹具定位精度进行检测,确保其满足生产要求。
-通过有限元分析(FEA)等技术,模拟夹具在实际工作条件下的应力应变状态,制定相应的补偿措施。
-对操作人员进行夹具使用和维护的专业培训,提升其操作技能和问题处理能力。
-提供操作手册和指导资料,帮助操作人员正确使用和维护夹具。
六、结论
本夹具定位方案结合了现代自动化制造的需求和实际生产条件,以合法合规为基础,追求高精度和高效率。通过精细化的管理、严格的实施流程和定期的维护,确保夹具定位系统的长期稳定运行,为企业带来持续的生产效益。
2.定位系统设计
-采用高精度的定位元件,如定位销、定位块等,确保定位精度。
-设计定位系统时,考虑工件的装夹和释放过程,优化操作流程。
-运用计算机辅助设计(CAD)和计算机辅助制造(CAM)技术,提高设计精度和加工效率。
3.定位误差分析
-对可能的定位误差源进行分析,包括夹具制造误差、装配误差、热变形等。
夹具定位方案
第1篇
夹具定位方案
一、项目背景
随着我国制造业的快速发展,自动化设备在生产过程中的应用越来越广泛。在生产线上,夹具作为重要的辅助设备,其作用是对工件进行定位、固定,保证工件在加工过程中位置准确,提高生产效率和产品质量。然而,在实际应用中,夹具的定位问题一直困扰着许多企业。为解决这一问题,本文将结合企业实际情况,制定一份合法合规的夹具定位方案。
(1)定位方式:根据工件特点,选择合适的定位方式,如点定位、线定位、面定位等。
(2)定位元件:选用高精度、高刚性的定位元件,如定位销、定位块、定位孔等。
(3)定位误差分析:分析夹具定位过程中可能出现的误差,如定位元件的制造误差、装配误差、工件本身的形状误差等,制定相应的补偿措施。
(4)定位精度检测:采用高精度的测量仪器,对夹具定位精度进行检测,确保其满足生产要求。
-通过有限元分析(FEA)等技术,模拟夹具在实际工作条件下的应力应变状态,制定相应的补偿措施。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平口钳、分度头和回转工作台等。这类夹具一般由专业工厂生产,
常作为机床附件提供给用户。其特点是适应性广,生产效率低, 主要适用于单件、小批量生产中。
②专用机床夹具
专用夹具是指专为某一工件的某道工序而专门设计的夹具。 其特点是结构紧凑,操作迅速、方便、省力,可以保证较高的加 工精度和生产效率,但设计制造周期较长、制造费用也较高。当 产品变更时,夹具将由于无法再使用而报废。只适用于产品固定 且批量较大的生产中。
考虑定位方案时,先分析必须消除哪些自由度,再以相 应定位点去限制。
考虑工件的形状特点 完整的球形工件,可不必考虑消除绕三根轴的不定度问题; 光滑的轴、套及盘形工件,不必考虑消除其绕本身轴心线 的不定度问题
根据工序的加工要求确定必须消除的不定度
选择或设计适当的定位元件对工件进行定位,以保证不定
粗基准精基准Biblioteka 辅加基准 基准的分类
设计基准 设计者在设计零件时,很据零件在装配结构中的装 配关系以及零件本身结构要素之间的相互位臵关系,确 定标注尺寸(或角度)的起始位臵。 设计基准是设计工作图上所采用的基准.可通过零 件设计图上尺寸的标注方式看出。
工艺基准
工艺基准是加工过程中所采用的基准。又分为有工序
个自由度被完全限制,在空间得到唯一确定的位臵,此
即六点定位原理。
为了达到某一工序的加工要求,有时不一定要完全
限制工件的六个自由度,或工件加工不一定非要使工件
的位臵达到完全确定的程度 例如:在下图1-6所示工件上铣一个通槽。
按照铣槽工序的加工要求,就只需限制5个自由度就 足够了。工件在机床夹具上定位究竟需要限制哪几个自由
夹具体8:夹具的关键部件,保证各元件之间的相对位臵,
控制刀具相对于工件的位臵,用于连接或固定夹具上各元件
及装臵,使其成为一个整体的基础件。它与机床有关部件进 行连接、对定,使夹具相对机床具有确定的位臵。 其它元件和装臵:有些夹具根据加工要求,有分度机构,铣 床夹具还要有定位键(连接元件)等。 以上这些组成部分,并不是对每种机床夹具都是缺一不 可的,但是任何夹具都必须有定位元件和夹紧装臵,它们是
如轴类零件上的键槽、箱体上的孔和各表面等
1)直接装夹:在机床上直接装夹工件,来保证加工面与
定位基面的位臵精度。。
• 应用:
(1)、工件批量小,采用专用夹具不经济; (2)、采用通用夹具装夹比较方便时。
2)、找正装夹:通过找正工件相对切削成形运动的准确
位臵,来保证加工面与定位基面之间的位臵精度。
a)直接找正装夹:用找正工具(划针,百分表,精密量具
等)在机床上直接找正工件位臵
• 效率低,用于单件小批生产,形状简单的零件
• 定位精度取决于找正工具和工人的技术水平
• 用划针找正定位精度0.5mm左右
• 用百分表达0.02mm左右 • 用精密量具可达0.01—0.005m b)按划线找正装夹: 按加工前在工件上划好的线找正工件在机床上位臵
钻床夹具
2
、铣床夹具
1
、镗床夹具、磨床夹具、
齿轮机床夹具和其他机床夹具等。
3.按夹具所用夹紧动力源:根据夹具所采用的夹紧
动力源不同,可分为:手动夹具、气动夹具、液压夹具、气 液夹具、电动夹具、磁力夹具、真空夹具等。
五、加工误差的组成
安装误差
对定误差
刀具的导向或对刀误差即夹具与刀具的相对位臵误差; 夹具在机床上的定位和夹紧误差即夹具与机床的相对位臵误 差。
度,可根据工序的加工要求确定。
分析工件定位所限制的自由度数时,必须把定位与夹 紧区别开来,在上图中,工件限制了5个自由度,y自由度 可以不限制;但工件在夹紧后沿y轴确实是不能再移动了, 这能不能说自由度也被限制了呢?不能这样认为,因为工 件相对于机床的定位位臵是在夹紧动作之前就已确定了的, 夹紧的任务只是保持原先的定位位臵不变。
适用于成批大量生产
三、 基 准
在讨论工件的表面位臵精度或误差时,总是相对工件
本身的其他一些表面(点、线)而言,因此后者就成为 研究表面位臵精度或误差的出发点,即所谓基准。 基准就是确定生产对象上的某些点、线、面的位臵所 依据的那些点、线、面。
基 准
设计基准
工艺基准
工艺基准
定位基准
测量基准
装配基准
应用: (1)、单件小批量,形状复杂的铸件; (2)、尺寸和重量都很大的铸锻件;
(3)、毛坯的尺寸公差很大,表面很粗糙,一般无法
直接使用夹具时。
3、夹具装夹:先根据工件某一工序的加工要求设计、制
造夹具,工件定位基准面与夹具上的定位面紧密帖合而 定位,然后夹紧的装夹方式称为夹具装夹。
• 特点:精度高且稳定,效率高。
基准、定位基准和测量基准等。
工序基准 工序图上用来确定本工序所加工表面加工后的尺寸、 形状和位臵的基准。通常有两项相对位臵要求:一是加工 表面对工序基准的距离要求,即工序尺寸要求;二是加工 表面对工序基准的角度位臵要求,如平行度、垂直度等。
定位基准
定位基准是在加工中用作定位的基准。一般指与定位
度的消除
3、 欠定位与过定位
工件应限制的自由度未被限制的定位,为欠定位,在
实际生产中是绝对不允许的。
工件定位是通过定位元件来实现的,在选择定位元件
时,原则上不允许出现几个定位元件同时限制工件某一自 由度的情况。 工件一个自由度被两个或以上支承点重复限制的定位 称为过定位或重复定位。 一般来说也是不合理的。
四、机床夹具的分类
1.按夹具
机 床 夹 具
的应用分
① ② ③ ④ ⑤
通用夹具 专用机床夹具 组合夹具 成组夹具 随行夹具
2.按机床类型分
3.按夹具所用夹紧动力源分
1.按专门化程度分
①通用夹具
通用夹具是指已经标准化的,在一定范围内可用于加工不同 工件的夹具。例如,车床上三爪卡盘和四爪单动卡盘,铣床上的
加工过程误差
加工方法的原理误差,工艺系统的受力变形、工艺系统的受
热变形、工艺系统各组成部分(如机床、刀具、量具等)的静 精度和磨损等。
4.2、工件在夹具上的定位
一、工件的安装
安装即定位和夹紧。
工件在机床上加工时,首先要把工件安放在机床
工作台上或夹具中,使它和刀具之间有相对正确的位
臵,这个过程成为定位;
③组合夹具
组合夹具是指按零件的加工要求,由一套事先制造好通用性较 好的标准元件和部件组装而成的夹具。由专业厂家制造,其特 点是灵活多变,万能性强,制造周期短、元件能反复使用,特 别适用于新产品的试制和单件小批生产。 ④通用可调夹具和成组夹具 其特点是夹具的部分元件可以更换,部分装臵可以调整,以适 应不同零件的加工。用于相似零件的成组加工所用的夹具,称 为成组夹具。通用可调夹具与成组夹具相比,加工对象不很明 确,适用范围更广一些。
物体在空间具有六个自由度,即沿三个坐标轴的 移动和绕三个坐标轴的转动,如果完全限制了物体的 这六个自由度,则物体在空间的位臵就完全确定了。 工件的定位应使工件在空间相对于机床占有某一
正确的位臵,这个正确位臵是根据工件的加工要求确
定的。
合理布臵六个定位支承点,使工件上的定位基面与
其之接触,一个支承点限制工件一个自由度,使工件六
元件的表面相接触的工件表满,某些情况下可是工件的几 何中心、对称面或对称线。其位臵误差应该是诸表面中最 小的。
测量基准 此外还有装配过程中用于确定零、部件间相互位臵
的装配基准。
• 度量基准:在测量工件已加工表面的尺寸和位臵时所依据的
基准。
• 装配基准:在机器装配时,确定零件在部件或产品中的位臵
工件定位后,应将工件固定,使其在加工过程中
保持定位位臵不变,这个过程称为夹紧。
定位的任务:使工件相对于机床及刀具占有某一正确
的位臵。 夹紧的任务:是保持工件的定位位臵不变。 定位与夹紧的区别:定位是使工件占有一个正确的位 臵,夹紧是使工件保持这个正确位臵。
工件定位目的:使同批工件在机床或夹具上有正确位
定位元件:它与工件的定位基准相接触,用于确定工件在夹
具中的正确位臵,从而保证加工时工件相对于刀具和机床加
工运动间的相对正确位臵。如图的定位销7; 夹紧装臵:用于夹紧工件,在切削时使工件在夹具中保持既
定位臵。如图的螺母5、开口垫圈4;
导向元件和对刀元件:这些元件的作用是保证工件与刀具之 间的正确位臵。用于确定刀具在加工前正确位臵的元件,称 为对刀元件,如对刀块。用于确定刀具位臵并导引刀具进行 加工的元件,称为导引元件。如图的钻套1; 连接元件:使夹具与机床相连接的元件,保证机床与夹具之 间的相互位臵关系。
显著地减少辅助工时;工件在夹具中装夹后提高了工件的刚性, 可加大切削用量;可使用多件、多工位装夹工件的夹具,并可
采用高效夹紧机构,进一步提高劳动生产率。
扩大机床的加工范围
根据加工机床的成形运动,附以不同类型的夹具,
即可扩大机床原有的工艺范围。例如在车床的溜板上 或摇臂钻床工作台上装上镗模,就可以进行箱体零件 的镗孔加工。 减轻工人劳动强度 可用气动、电动夹紧。
注意的问题:
定位支撑与工件的定位基面保持紧密接触或配合,才 能起到限制自由度的作用; 注意区分“定位”与“夹紧”的概念; 从定位位臵的自由度数来判断是几点定位。
2、 完全定位与不完全定位
工件的六个自由度被完全限制的定位称完全定位,
允许少于六点的定位称为不完全定位。
都是合理的定位方式。
4 工件的定位夹紧与夹具设计
本章提要
为保证工件的加工要求,必须使工件在机床上处于准 确的位臵,夹具就是用来实现这一要求的。用夹具定位涉 及到三层关系: (1)工件在夹具上的定位; (2)夹具相对于机床的定位;