汽车CAN总线——故障诊断介绍
汽车CAN总线技术及故障分析
汽车CAN总线技术及故障分析随着汽车电子技术的飞速发展,汽车CAN总线技术的应用越来越广泛。
CAN总线技术是一种用于控制汽车电子系统的通讯协议,它可以让各个汽车电子模块之间进行数据交换,从而实现汽车各种功能的协调与控制。
由于汽车CAN总线系统复杂,故障问题也较为常见。
本文将就汽车CAN总线技术及故障分析进行详细介绍。
一、汽车CAN总线技术概述CAN总线是Controller Area Network的缩写,即控制器局域网络。
它是一种用于控制设备之间通讯的串行总线标准。
CAN总线技术最早由德国的Bosch公司在1986年提出,从此以后就迅速发展并得到广泛应用,成为了现代汽车电子系统的核心通讯技术之一。
CAN总线技术的优势主要体现在以下几个方面:1. 高可靠性:CAN总线系统采用了差分信号传输以及位优先和消息权限等机制,保证了通讯的可靠性和稳定性。
2. 高速传输:CAN总线系统可实现高速数据传输,满足了现代汽车电子系统对于大数据处理和快速响应的需求。
3. 灵活性:CAN总线系统采用多主机通讯结构,可以实现多个设备之间的并行通讯,从而提高了系统的灵活性和通讯效率。
4. 简化布线:CAN总线系统可以通过一根双绞线连接各个控制器,减少了布线的复杂性和成本。
在现代汽车中,CAN总线系统主要分为两种类型:CAN高速总线和CAN低速总线。
CAN高速总线主要用于发动机控制、变速器控制、刹车系统等对实时性要求较高的控制模块之间的通讯;而CAN低速总线主要用于车门控制、座椅控制、仪表盘等对实时性要求不高的控制模块之间的通讯。
1. CAN总线通讯中断故障CAN总线通讯中断可能是由于CAN控制器硬件故障、CAN总线信号线路断路、接触不良引起的。
当汽车CAN总线通讯中断时,会导致汽车各个控制模块之间无法正常通讯,从而出现各种各样的故障表现,例如ABS系统故障、发动机无法启动等。
解决方法:使用诊断仪对CAN总线进行检测,查找故障的具体位置。
汽车CAN总线技术及故障分析

汽车CAN总线技术及故障分析CAN(Controller Area Network)总线技术是一种现代汽车中广泛应用的通信协议。
它是针对汽车通信需求而设计的一种高可靠性、高效率的总线系统。
CAN总线技术能够实现电子控制单元(ECU)之间的即时通信,以及车辆与传感器、执行器之间的信息交换。
CAN总线技术的主要优点之一是其分布式控制能力。
CAN总线可以连接多个ECU,使它们能够相互通信并共享信息。
这种分布式控制能力使得车辆系统更加灵活可靠,可以更好地应对各种复杂的驾驶条件。
另一个优点是CAN总线技术的高效率。
因为CAN总线采用了CSMA/CD(载波侦听多路访问/冲突检测)机制,可以实现多个ECU同时进行通信,从而提高了总线的利用率。
CAN总线还采用了高速数据传输和优先级传输的机制,使得通信速度更快、更可靠。
CAN总线技术也存在一些故障问题。
其中一个常见的问题是总线冲突。
由于多个ECU同时访问总线,可能会导致冲突,进而影响通信效率。
为了解决这个问题,CAN总线使用了冲突检测机制,一旦发现冲突,ECU会停止数据传输并延后一段时间后重新尝试。
总线断开也是一个常见的故障问题。
总线断开可能是由于线缆损坏、连接器松动等原因造成的。
一旦总线断开,ECU之间的通信将无法进行,从而导致车辆系统无法正常工作。
解决这个问题的方法是检查线缆和连接器的状态,并及时修复或更换。
还有一个故障问题是总线负载过高。
如果总线上连接了过多的ECU,总线的负载可能会超过其承受能力,导致通信延迟或丢失数据。
解决这个问题的方法是合理规划和配置ECU,以保证总线负载始终在合理范围内。
CAN总线技术是一种在现代汽车中广泛应用的通信协议。
它具有分布式控制能力和高效率的优点,可以实现车辆系统的即时通信和信息交换。
也需要注意解决一些常见的故障问题,如总线冲突、总线断开和总线负载过高,以确保汽车系统正常运行。
丰田卡罗拉轿车CAN总线故障诊断案例

E14
22
(X)
E14 CANL
中央气囊传感器总成
5 BR(*1) (X)
16 W(*1)
3 CANH
E49
2
(X)
E49 CANL
转向角传感器 (X)
支 线 (CANH) 21
W
支 线 (CANL)
图 1 丰田卡罗拉轿车 CAN 总线
26 汽车维修 2017.3
技师手记
AUTOMOBILE MAINTENANCE
*1: 带 智 能 上 车 和 起 动 系 统 或 自 动 灯 控 *2:除 *1 外 *3: 手 动 空 调 *4: 自 动 空 调 *5: 带 驻 车 辅 助 监 视 系 统
CANH 27 G 2
CANH 1
E32
(X)
7
CANL E32
SB 3 (X)
W 14
动力转向 ECU
CANH 15 23 E52 E61
技师手记
AUTOMOBILE MAINTENANCE
丰田卡罗拉轿车 CAN 总线
故障诊断案例
王井
一、故障现象 有 1 辆 2006 年款卡罗拉轿车, 排量为 1.6L,发动机 故 障 指 示 灯 、 ABS 故障指示灯、动力转向故障指示 灯等许多故障灯在发动机起动以后 仍然不熄灭,着车后发动机有明显的 怠速发抖,加速也不是很顺畅。用诊 断仪读取 DTC,结果是失去通信,诊 断仪无法进入到发动机电控系统。 二、故障诊断与分析 针对发动机起动后许多故障指 示灯同时点亮,诊断仪无法进入发动 机电控系统这一现象,凭经验可知, 这是发动机通信故障;从发动机怠速 抖动,加速不畅可知,这是明显的单 缸“缺火”现象。这是 1 个难度不小的 双重故障,即:必须首先排除通信网 络的故障,才能使发动机自诊系统恢 复正常,再借助自诊系统排除发动机 的故障。于是摆在我面前的就有 2 个 选择:要么先解决通信问题,再解决 发动机抖动故障;要么放下通信故障 先从发动机怠速发抖故障入手。 1.发动机通信故障分析 考虑到汽车故障诊断每前进一 步都要有的放矢,所以,我决定先从 通信故障入手。根据维修经验,但凡 多个故障灯亮,总是通信故障或者和 通信故障有关。不必在意到底是 3 个 灯还 4 个灯,也不必从任何一个灯入 手,要先进行 Bus check(备注:即总
can接口功能描述

can接口功能描述【导言】CAN(Controller Area Network,控制器局域网)是一种常用于车载通信系统中的串行总线通信协议,其作用是连接车辆内部的电子设备,实现数据的传输和控制。
CAN接口是汽车电子系统中常用的接口之一,它广泛应用于车辆的信息传输、故障诊断、以及车辆控制等方面。
本文将对CAN接口的功能进行全面、生动的描述,并提供一些指导意义的内容。
【一、CAN接口的功能】1. 数据传输:CAN接口可以实现车辆内部各个电子设备之间的数据传输,包括车身控制单元、发动机控制单元、传感器、执行器等设备。
通过CAN接口,这些设备可以相互交换信息,实现车辆功能的协调和联动。
2. 故障诊断:CAN接口的另一个重要功能是实现车辆的故障诊断。
通过CAN接口,车辆内部的各个电子设备可以向诊断工具发送故障码和状态信息,以便进行故障诊断和修复。
这大大提高了车辆维修的效率和准确性。
3. 车辆控制:CAN接口可以实现车辆的远程控制,通过CAN总线可以向车辆的各个电子设备发送指令,从而实现车辆的控制和操作。
例如,发动机控制单元可以通过CAN接口控制发动机的启停、调速等操作,提高驾驶的便利性和安全性。
4. 数据采集和监测:CAN接口可以从车辆内部的各个传感器中获取数据,并将这些数据传输给电子控制单元进行处理。
通过CAN接口,可以实时监测车辆的各项指标,如车速、油耗、刹车状态等,为驾驶员提供准确和及时的信息。
5. 网络管理:CAN接口还可以实现车辆内部的网络管理,包括节点地址分配、数据的优先级控制和冲突检测等。
通过CAN接口的网络管理功能,可以确保数据的传输准确和稳定性,提高整个车载系统的可靠性。
【二、CAN接口的应用领域】1. 汽车行业:CAN接口是汽车电子系统中最常用的接口之一。
它被广泛应用于车辆的电控系统、信息娱乐系统、安全系统等方面。
通过CAN接口,车辆内部的各个电子设备可以互相通信和协作,为驾驶员提供更多的功能和便利。
CAN总线系统的故障诊断

当CAN-BUS数据总线对正极短 路时,检测到的CAN-BUS数据总线 的信号波形如图(b)所示。
当CAN-BUS数据总线中的 CAN-Low总线断路时,检测到 的CAN-BUS数据总线的信号波 形如图(b)所示。
当CAN-BUS数据总线中的 CAN-High总线断路时,检测到 的CAN-BUS数据总线的信号波 形如图(b)所示。
注意
终端电阻不是一定为大 约120Ω,而是相应的 阻值依赖于总线的结构
在总的阻值测量后,当在一 如果在拔取控制单元后显示 个带有终端电阻控制单元的 的阻值变得无穷大,那么, 插头拔下后测量的阻值没有 或者是连接中的控制单元终 发生变化,则说明系统中存 端电阻损坏,或者是到该控 在问题。这说明被拔取的控 制单元的CAN-Bus数据传输 制单元的终端电阻可能损坏 线出现故障。 或者是CAN-Bus总线出现断 路。
CAN-Low线对正极短路 • CAN-Low线的电压大约为12V、CAN-High线的电压
电位正常,汽车网络通讯系统在此故障下,变更为单线 工作状态。
CAN-High线对正极短路 • CAN-High线的电压大约为12V、CAN-Low线的电压
电位正常,汽车网络通讯系统在此故障下,变更为单线 工作状态。
同样的,CAN-Low驱动数据总线上有信号传输时,总线上的电压 值会在1.5~2.5 V之间高频波动,因此,万用表的测量值为1.5~2.5 V之 间,小于2.5 V但靠近2.5 V,如图所示。
3.总线波形的检测
检测CAN总线波形信 号时,一般采用测试仪或 示波器测量总线数据信号 的波形,例如采用双通道 的示波器进行同步波形的 测量,能够直观地观察 CAN总线系统波形信号有 无异常现象。
软件故障
即传输协议或软件 程序有缺陷或冲突,从 而使汽车CAN总线系统 通信出现混乱或无法工 作,这种故障一般会成 批出现。
浅析高速CAN总线系统故障诊断

汽车维修2020.3浅析高速CAN 总线系统故障诊断何莹CAN 总线是目前国际上应用最广泛的现场总线之一,其具有成本低、稳定性高、系统扩充方便等一系列优越性。
本文从维修的角度,介绍高速CAN 总线系统常见的故障现象、故障分类、故障诊断方法,利用检测仪器万用表及示波器分析其典型故障,为汽车高速CAN 总线系统的故障诊断与检修提供参考。
目前常见的CAN 总线分为速率为500kBit/s 高速CAN 总线(驱动CAN 总线)和速率为100kBit/s 低速CAN 总线(舒适CAN 总线),本文以高速CAN 总线为例分析故障的现象和分类,利用检测仪器车用万用表和车用示波器分析其典型故障,并阐明其要点。
一、高速CAN 总线系统故障1.高速CAN 总线故障产生的原理为提高数据传递的可靠性,CAN 总线系统采用双绞线自身差分检测结构,这2条线分别称为CAN-High 线和CAN-Low 线。
如高速CAN 总线发生故障时,不是检测高速CAN 线上传递的信息,而是要检测其CAN-H 线和CAN-L 线上的信号电平是不是在正常范围内,如图1所示为高速CAN 总线CAN-H 线和CAN-L 线的额定电压,CAN-L 为1.5~2.5V ,CAN-H 为2.5~3.5V 。
2.高速CAN 总线故障现象特征高速CAN 总线网络系统发生故障时常会出现一些明显的故障特征:一是单个控制单元或多个控制单元出现故障,使用汽车专用诊断仪检测无法通信。
二是整个网络失效,造成一个或多个控制单元不工作或工作不正常。
三是在不同位置及不同系统中,同时显示出没有任何关联的不同的多个故障。
3.高速CAN 总线故障类型当高速CAN 总线系统发生故障时,通常按引起故障的原因分类,可分为三类:(1)电源系统故障,当工作电压低于10.5~15.0V 范围时,某些对工作电压要求高的控制单元会短暂的停工,因此会造成整个传输系统短暂的无法通信。
但由于此类故障不涉及高速CAN 总线系统的本质,按汽车电源系统常规故障诊断方法较易排除,故不做详细介绍。
经典CAN总线错误分析与解决方案

经典CAN总线错误分析与解决方案1、(CAN)总线的常见故障CAN总线错误分析与解决当CAN总线出现故障或数据传输异常时,往往会出现多种奇怪的故障现象,如仪表板显示异常,车辆无法启动,启动后无法熄灭,车辆动力性能下降,某些电控系统功能失等。
这是因为相关数据或(信息)是通过CAN总线传输的,如果传输失败,那么会产生多种连带故障,甚至造成整个(网络)系统瘫痪。
最为常见的故障症状是仪表板的显示异常,如下图所示。
在检修过程中,首先应查看具体的故障症状,根据故障症状和网络结构图来初步分析有可能是哪些原因造成的,然后使用相关的诊断仪器进行诊断,根据诊断结果制定相关检修方案,做到心中有数,目标明确。
接着查找具体的故障部位和原因,同时结合相应的(检测)方法和测量结果找到故障点,从而彻底排除故障。
由于CAN网络采用多种协议,每个控制模块的(端口)在正常的情况下都有标准电压,因此电压测量法可用于判断线路是否有对地或(电源)短路、相线间短路等问题。
为了确定CAN H 或CAN L 导线是否损坏或(信号)是否正常,可以测量其对地电压(平均电压)。
测量点通常在OBD 诊断(接口)处,如下图所示。
诊断接口的6号针脚连接CAN H 导线,14号针脚连接CAN L 导线。
如果诊断接口上连接有两组CAN总线,那么动力CAN总线使用6号和14号针脚,舒适总线使用3号和11号针脚。
诊断接口的针脚含义如下图所示。
正常情况下,当CAN总线唤醒后,CAN H 对地电压约为2.656V,CAN L 对地电压约为2.319V,而且两者相加为4.975V▼正常的CAN H 电压正常的CAN L 电压CAN故障通常的原因有CAN线短路、对电源短路、对地短路、相互接反。
2、CAN H与CAN L短路当CAN H 与CAN L 短路时,CAN网络会关闭,无法再进行(通信)。
会有相应的网络故障码。
CAN H 与CAN L 短路的总线波形如下图所示。
当两者相互短路之后,CAN电压电位置于隐性电压值(约2.5V)。
CAN总线故障检查方法
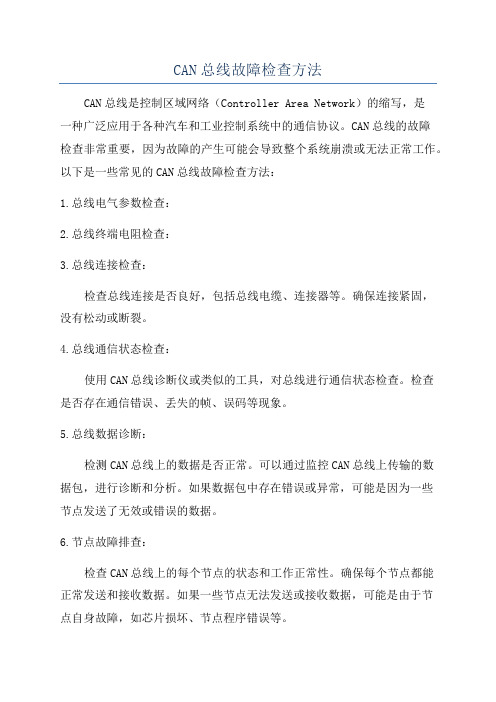
CAN总线故障检查方法CAN总线是控制区域网络(Controller Area Network)的缩写,是一种广泛应用于各种汽车和工业控制系统中的通信协议。
CAN总线的故障检查非常重要,因为故障的产生可能会导致整个系统崩溃或无法正常工作。
以下是一些常见的CAN总线故障检查方法:1.总线电气参数检查:2.总线终端电阻检查:3.总线连接检查:检查总线连接是否良好,包括总线电缆、连接器等。
确保连接紧固,没有松动或断裂。
4.总线通信状态检查:使用CAN总线诊断仪或类似的工具,对总线进行通信状态检查。
检查是否存在通信错误、丢失的帧、误码等现象。
5.总线数据诊断:检测CAN总线上的数据是否正常。
可以通过监控CAN总线上传输的数据包,进行诊断和分析。
如果数据包中存在错误或异常,可能是因为一些节点发送了无效或错误的数据。
6.节点故障排查:检查CAN总线上的每个节点的状态和工作正常性。
确保每个节点都能正常发送和接收数据。
如果一些节点无法发送或接收数据,可能是由于节点自身故障,如芯片损坏、节点程序错误等。
7.环境干扰检查:环境干扰可能会对CAN总线的通信造成干扰或干扰,例如电磁辐射、电源噪声等。
检查总线周围的环境,排除干扰源。
8.诊断仪器使用:使用专业的CAN总线诊断仪器进行故障检查。
这些诊断仪器具有丰富的功能和参数设置,可以帮助用户更好地了解总线的状态和工作情况。
最后,对于CAN总线的故障检查,需要针对具体的问题进行分析和诊断。
上述方法只是一般性的指导,具体情况下还需要根据实际情况进行调整和补充。
同时,也需要具备一定的专业知识和技能来进行故障排查和处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7
协议数据单元 Protocol Data Unit(PDU) • 协议数据单元是一种特定的CAN数据帧格 式。
8
肯定应答 Acknowledgement,ACK • 确认所请求的动作已经被理解并完成。 否定应答 Negative-Acknowledgment NACK • 表明某个设备不能理解一个消息或者无法实 现一个请求操作。
诊断故障码定义
• 诊断故障代码(DTC)由4 个独立域构成, 这4 个部分是:
31
• 这些独立的参数不是一个单独的数,而是 一组描述故障的信息。诊断测试工具希望 通过控制模块地址和名字,确定诊断信息 的来源。诊断信息发送者信息并不包含可 疑参数信息(SPN),但也有助诊断。控 制模块的地址和名字参考网络管理部分。
34
35
• • • • • • • • • • •
实例 3 诊断故障代码以诊断信息的方式传送(例DM1) 已知: 油压预滤器参数,可疑参数数值(SPN=1208) 故障模式标志(FMI)为3 发生次数(OC)为10 所有的诊断故障代码域以英特尔格式传送(最小有效字节优先) 十进制 十六进制 二进制 SPN 1208 =4B816 =000 00000100 101110002(19 位) FMI 3 =316 =000112(5 位) OC 10 =A16 =00010102(7 位) CM =02(1 位)
38
39
Thank you!
40
• 向指定模块发送的请求指令,接收方必须作出响 应,如果接收方控制模块不支持指令请求的参数 组,接收方控制模块应发送一个NACK。如果请 求指令不指定模块,而接收方控制模块不支持被 请求的参数组,则接收方控制模块不发送任何响 应。如无特别说明,参数值的格式和范围应符合 GB/T××××.5 的定义。
28
29
参数监视需求
• 参数定义见 GB/T××××.5。任何在应用 层文档中定义了的并包含于参数组(PG) 中的参数将用于诊断。所以,若参数已定 义,它不能为了诊断的目的而重新定义。 有些情况下,有必要识别密切相关的有关 参数,比如,当油门踏板传感器出错时的 读数,和当前油门踏板传感器读数。
30
25
• 对在线控制模块进行某些关键功能的操作时,控 制模块将要求先进行正确的“解锁”程序。当控 制模块处于“锁定”状态时,只有该控制模块的 生产厂才有权决定是否允许对其进行操作,用户 必须直接从控制模块的生产厂代表获取特定的代 码或口令,且可能被要求使用于产品用软件,才 能正确“解锁”,进而对控制模块进行操作,以 保护控制模块不受未授权操作的侵害。不试图定 义控制器所要求的能力,或者不试图指定符合任 何特殊安全措施的信息DM14至DM18描述的诊断 指令不是为了限制对控制模块的访问,那些信息 需要安全系统防护,安全防护等级均由控制模块 26 生产厂方决定。
• 实施安全防护不应防碍外部测试工具与整 车在线控制模块间基本的诊断通信。附件c, 附件d和附件e特别描述了安全体系实施的 过程,如何获取对控制模块进行内存操作 的方式,以及控制模块限制外部对内存操 作的多种方式。
27
诊断连接器
• 本标准第2 部分:物理层—非车载诊断连接器对诊断连接 器的安装要求、性能要求、物理要求都做了阐述。
32
• 每个故障码发送 4 个字节,这4 个字节的定义见 DM1。 • 激活状态的诊断故障代码DM1:本指令包含的诊 断信息仅限于当前正处于激活状态的可改变指示 灯状态的故障码。故障码和指示灯两者都是电子 控制模块用来通知网络上其它成员该模块自身的 诊断状态。该数据信息包括了:指示灯状态,一 列诊断代码以及当前激活状态诊断代码的发生次 数。这也包括排放相关的诊断故障代码。
上海海马汽车研发有限公司电气室
汽车CAN总线 总线——诊断 汽车 总线 诊断
编制:丰烨
1
目
录
概述 术语和定义 符号和缩写的涵义 技术要求 诊断代码具体内容及格式
2
概述
• CAN总线网络控制系统在低电压、小电流下工作, 状态相当可靠,一般情况下极少发生故障,另一 方面,由于导线大量减少,接插件也相应减少, 消除了断线、短路及接触电阻引发的故障,可见 系统能发生故障的机会是很少的,但也不是绝对 的。 • 由于CAN总线系统采用数字传输信号,不能用对 待一般汽车电器传统的检修方法,只用万用表测 电压和电阻进行判断,而必须用到原厂配备的故 障诊断仪和配套的附属器件,如汽车专用示波仪, 原车电路图和故障代码等,通过读取故障码进行 分析,才能判断故障所在。
23
安全性
以下信息在定义安全性时必须提供。
• 用户可使用测试工具通过整车网络存取和修改控 制模块的内存信息。支持这一功能的控制模块应 设有接入整车网络的接口,并有能力拒绝“未授 权”的修改请求,确保数据安全。
24
• 安全性不得限制测试工具对控制模块的其它操作 指令,见 DM1至DM13及DM19,目的是允许生 产厂限制用户对控制模块的数据操作。本文所列 的安全体系是由控制模块厂推荐的,各个控制模 块可根据自身安全需求具体定制。测试工具可通 过整车通信网络发出外部指令,修改接入网络的 各个控制模块的内存内容,不恰当的修改可导致 电气部件的损坏,整车性能下降,不能达到国家、 国际标准,或者侵害生产厂的信息安全权益。
12
技术要求 技术要求
• 诊断定义应满足使用本标准网络的所有潜 在用户的要求,适用于所定义的工业领域。 大量的功能设置为将来预留发展空间,可 逐步定义补充的特征值,参数组和参数。
13
技术要求 技术要求
• 期望的诊断性能 以下的性能将在本文或将来的版本中定义。 • a.安全性 • b.连接器 • c.诊断状态信息支持 • d.诊断测试程序支持
33
• 传输速度:一旦有 DTC 成为激活的故障,就有DM1 消息 会被传输,并在之后处于正常的每秒仅一次的更新速度。。 如果故障激活的时间是一秒或更长,然后变为不激活的状 态,则应传输DM1 消息以反映这种状态的改变。如果在 一秒的更新期间有不同的DTC 改变状态,则要传输新的 DM1 消息反映这个DTC。为了避免因高频率的间断故障 而引起的高消息传输率,建议每个DTC 每秒只有一个状 DTC 态改变被传输。这样,如果故障码在一秒期间发生两次状 态改变,激活/不激活状态,如实例1 中所示,会有一个 用于确认DTC 成为激活状态的消息,和在下一个传输期 间确认它为不激活状态的消息。该消息仅当有一个激活的 DTC 存在或处于响应一个请求时才被发送。注意,当不 止一个激活的DTC 存在时,这个参数组将会要求使用 “多包传输”参数组。
9
多包消息 Multipacket Messages • 当具有相同参数组编号的所有数据需要使用 多个CAN 数据帧来传输时使用的一种J1 939消息。每个CAN 数据帧拥有相同的 标识符,但在每个包中数据不同。
10
符号缩写的含义
• • • • • • • • • • • • • • • • • DM1 诊断信息1,当前故障码 DM2 诊断信息2,历史故障码 DM3 诊断信息3,历史故障码的清除/复位 DM4 诊断信息4,停帧参量 DM5 诊断信息5,诊断准备就绪 DM6 诊断信息6,持续监视系统测试结果 DM7 诊断信息7,指令非持续监视测试 DM8 诊断信息8,非持续监视系统测试结果 DM9 诊断信息9,氧传感器测试结果 DM10 诊断信息10,非持续监视系统测试标志符识别支持 DM11 诊断信息11,当前故障码清除/复位 DM12 诊断信息12,发送排放相关的当前故障码 DM13 诊断信息13,停止启动广播 DTC 诊断故障代码 FTP 联合测试程序 MIL 故障指示灯 NA 不支持
3
概述
• SAE1939-73:2004 《应用层—诊断》 • 一致性程度为修改采用(技术内容完全等 同) • 本部分规定了 CAN 总线的应用层-诊断的 技术要求
4
术语和定义
诊断故障代码 Diagnostic Trouble Code • 一种用以识别故障类型、相关故障模式以 及它的发生次数的4 字节数值。
21
• 车载系统对 GB/T××××.4 中定义的请求指令 均应响应。多个响应可能来自单一的请求指令, 要求使所有模块都有足够的时间来访问数据链路 并发送它们的响应。如果在规定时间内(例如 250ms),测试工具没有收到任何响应,则测试 工具认为不会再接收到任何响应;或者测试工具 已接收到一个响应,则测试工具认为将不会再接 收其它响应。 • 测试工具在接收到末次请求指令的响应之前,或 无响应计时器超时之前,不会发送新的请求指令。 任何情况下测试工具发送的连续两次请求指令的 时间间隔应小于GB/T××××.4 所指定的时间。 22
14
• a. 安全性 定义了使用串行数据链接的安全方案,使 工业标准测试工具能在维修服务程序中完 成必需的任务,包括操作诊断指令,存取 车辆配置信息,重新标定控制模块。
15
• b.连接器 测试工具可以通过连接器接入整车网络。 • c. 诊断状态信息支持 提供一组信息,能够读取/清除故障信息, 监控整车运行参数,读取/设置车辆及部件 的配置信息以及其他相关信息。
16
• d. 诊断测试程序支持 支持提供一种功能,测试工具使各个控制 模块进入指定的测试程序,由此确定子系 统的运行状态。
17
• 推荐的诊断支持 以下的性能将在本文或将来的版本中定义。 • a.排放相关 • 作为最基本的功能,所有使用本标准网络, 影响整车排放性能并满足OBDⅡ或OBD要 求的控制模块应支持表1的功能:
11
• • • • • • • • • • • • • • • • •
PID 参数标志符(SAE J1578 或SAE J1979) OBDⅡ 第二代车载诊断系统 DM14 内存存取请求 DM15 内存存取响应 DM16 二进制数据转换 DM17 引导载入数据 DM18 数据安全性 DM19 标定信息 DM20 监视工作比率 DM21 MIL 激活时的行程距离 EDC 错误检测和/或校准 EDCP 错误检测和/或校准参数 FMI 故障模式指示器 MA 内存存取 PG 参数组 OC 出现次数 SPN 可疑参数编号