微机原理-第9章_2(串行接口).
微机原理及接口第九章作业答案
“微机系统原理与接口技术”第九章习题解答(部分)1. 什么是并行接口和串行接口?它们各有什么作用?答:并行接口是指接口与外设之间按字长传送数据的接口,即4位、8位或16位二进制位同时传送;而串行接口是指接口与外设之间依时间先后逐位传送数据的接口,即一个时刻只传送一个二进制位。
并行接口传送速度较快,但在远距离传送数据时成本高,损耗大,且平行数据线之间干扰大,所以并行接口一般适用于近距离的高速传送,而串行接口则适用于远距离传送。
2. 试画出8255A与8086CPU连接图,并说明8255A的A o、A i地址线与8086CPU的A i、A2地址线连接的原因。
答:8255A与8086CPU的连线图如下图所示:题9-2图8086系统有16根数据线,而8255只有8根数据线,为了软件读写方便,一般将8255 的8条数据线与8086的低8位数据线相连。
8086在进行数据传送时总是将总线低8位对应偶地址端口,因此8086CPU要求8255的4个端口地址必须为偶地址,即8086在寻址8255 时A0脚必须为低。
实际使用时,我们总是将8255的A0、A1脚分别接8086的A1、A2脚,而将8086的A0脚空出不接,并使8086访问8255时总是使用偶地址。
4. 简述8255A工作在方式1时,A组端口和B组端口工作在不同状态(输入或输出)时,C端口各位的作用。
注:带*的各中断允许信号由 C 口内部置位/复位操作设置,非引脚电平。
5. 用8255A控制12位A/D转换器,电路连接如下图所示。
设B 口工作于方式1输入,C 口上半部输入,A 口工作于方式0输入。
试编写8255A的初始化程序段和中断服务程序(注:CPU采用中断方式从8255A中读取转换后的数据)。
答:设8255的A、B、C及控制端口的地址分别为PORTA、POATB、PORTC和PCON,则一种可能的程序段实现如下:初始化8255AMOV AL,10011110B;设置8255A的工作方式控制字OUT PCON,ALMOV AL,00000101B;设置C 口置位復位控制字,使INTEA (PC2)为OUT PCON,AL;高电平,允许B 口中断MOV AL,00000010B;设置C 口置位/复位控制字,使PC1(IBF B)输出OUT PCON,AL;低电平,启动第一次A/D转换6. 用8255A作为CPU与打印机接口,8255的A 口工作于方式0,输出;C 口工作于方式0。
微机原理总目录
※
14.2 PC/XT硬件结构 14.3 总线技术
※
◆实验指南
※
15.1 《微机原理与接口技术》课程上机简介
15.2 汇编语言上机指导
※
4.4
4.5 4.6
程序的段结构
地址表达式 宏定义与宏调用
※
※
◆汇编语言程序设计
※ 5.1
汇编语言软件开发步骤及输入/输出问题 顺序程序设计 分支程序设计
※ 5.2
※ 5.3
※ 5.4
循环程序设计
专题应用程序设计
※ 5.5
◆8086微处理器结构
※
6.1 6.2 6.3
8086微处理器工作模式与引脚功能 系统组成 8086的总线操作与时序
※
※
※
◆ 并行接口芯片8255A
※
10.1
10.2 10.3 10.4
8255A概述
8255A的控制字 8255A的工作方式 8255A的编程
※
※
※
◆串行通信
※
11.1
11.2 11.3
串行通信概述
RS-232C串行接口标准 异步通信接口芯片8250
※
※
◆ DMA 控 制 器 8237A
※
12.1 12.2 12.3
1微机原理与接口技术王丰王兴宝编著目录第一章基础知识第二章微型机算机的组成机工作原理第三章指令系统第四章masm伪指令系统第五章汇编语言程序设计第六章8086微处理器结构第七章半导体存储器第八章输入输出技术第九章中断第十章并行接口芯片8255a第十一章串行通信第十二章dma控制器8237a第十三章其他常用接口第十四章pc机系统结构及总线技术第十五章实验指南基础知识11数制12码制13常用数字逻辑器件微型机算机的组成机工作原理21微型机算机的组成机工作原理22pc机的编程结构指令系统
微机原理试题
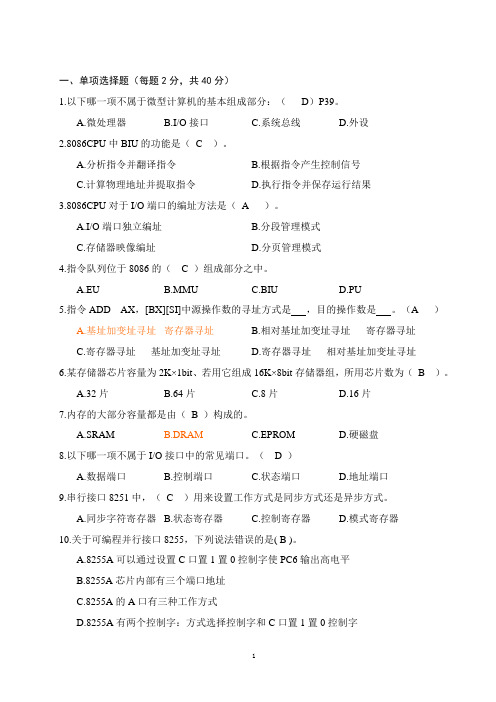
一、单项选择题(每题2分,共40分)1.以下哪一项不属于微型计算机的基本组成部分:(D)P39。
A.微处理器B.I/O接口C.系统总线D.外设2.8086CPU中BIU的功能是(C )。
A.分析指令并翻译指令B.根据指令产生控制信号C.计算物理地址并提取指令D.执行指令并保存运行结果3.8086CPU对于I/O端口的编址方法是(A )。
A.I/O端口独立编址B.分段管理模式C.存储器映像编址D.分页管理模式4.指令队列位于8086的( C )组成部分之中。
A.EUB.MMUC.BIUD.PU5.指令ADD AX,[BX][SI]中源操作数的寻址方式是,目的操作数是。
(A )A.基址加变址寻址寄存器寻址B.相对基址加变址寻址寄存器寻址C.寄存器寻址基址加变址寻址D.寄存器寻址相对基址加变址寻址6.某存储器芯片容量为2K×1bit、若用它组成16K×8bit存储器组,所用芯片数为(B )。
A.32片B.64片C.8片D.16片7.内存的大部分容量都是由(B )构成的。
A.SRAMB.DRAMC.EPROMD.硬磁盘8.以下哪一项不属于I/O接口中的常见端口。
( D )A.数据端口B.控制端口C.状态端口D.地址端口9.串行接口8251中,(C )用来设置工作方式是同步方式还是异步方式。
A.同步字符寄存器B.状态寄存器C.控制寄存器D.模式寄存器10.关于可编程并行接口8255,下列说法错误的是( B )。
A.8255A可以通过设置C口置1置0控制字使PC6输出高电平B.8255A芯片内部有三个端口地址C.8255A的A口有三种工作方式D.8255A有两个控制字:方式选择控制字和C口置1置0控制字11.在系统中,若想管理30个中断请求,则需要用(D )片8259A构成二级级联系统。
A.2B.3C.4D.512.在初始化8259A的过程中,(A)是必须写入的。
A.ICW1和ICW2B.ICW1和ICW3C.ICW2和ICW3D.ICW2和ICW413.8237中通道0的当前地址寄存器有(B )个二进制位。
《微机原理与接口技术》第九章8253
二、8253的内部结构
数据总线 缓冲器 读/写控 制电路 计数通道
通道控制 寄存器
三、 8253的管脚分配
控制线
数据线 通道选择
通道管脚
四、 8253的编程
8253只有一个控制字,8253的一个方式 控制字只决定一个计数通道的工作模式。 8253 的控制字格式如图所示。共分为 4 部 分,通道选择、计数器读 / 写方式、工作 方式和计数码的选择。
第9章 可编程接口芯片
可编程接口概术 可编程定时/计数器接口芯片8253
可编程接口概术
一个简单的具有输入功能和输出功能的 可编程接口电路如下图,它包括一个输入接口, 其组成主要是八位的三态门;一个输出接口, 其组成主要是八位的锁存器;另外还有八位的 多路转换开关及控制这个开关的寄存器FF。
9. 1 可编程定时/计数器接口芯片8253 一、功能
定时和脉冲信号的处理与接口是完全有别于 并行信号的,其特点是信号形式简单但需要连 续检测,下面介绍的INTEL8253可编程定时/ 计数器就是可以实现所要求这方面功能。8253 内部有3个独立的16位定时/计数器通道。计 数器可按照二进制或十进制计数,计数和定时 范围可在1—65535之间改变,每个通道有6种 工作方式,计数频率可高达2MHz以上。
4、方式3——方波发生器 方式2虽然可以作分频电路,但其输出 是窄脉冲,如果是方波,就只有选方式3
5、方式4——软件触发方式 方式4在工作过程中有以下特点:
a、 门控信号GATE为高电平,计数器开始减 1计数,OUT维持高电平; b、 当计数器减到0,输出端OUT变低,再经 过一个 CLK 输入时钟周期, OUT 输出又变 高。
解:1、电路。 需要两个通道,一个作为计数,选用通道0。另一 个产生1KHz信号,选用通道1。工作原理如下,传感 器电路把物理事件转换为脉冲信号输入到通道0计数, 当记录10000个事件后,通道0计数器溢出,GATE端输 出高电平,这时通道1开始工作,产生1KHz信号推动喇 叭发音。
微机原理第九章练习题及解

微机原理第九章练习题及解一:单项选择题●8253的端口地址数为( C )。
A:1个B:2个C:4个D:8个●8255的A端口读写操作时,地址线(A)。
A:A1 = 0、A0 = 0 B:A1 = 0、A0 = 1C:A1 = 1、A0 = 0 D:A1 = 1、A0 = 1●写8255的控制字88H,功能是( B )。
A:A口方式0输入B:B口方式0输出C:置PC4为低D:置PC7为高●从8255的C端口读状态信息时,地址线( C )。
A:A1 = 0、A0 = 0 B:A1 = 0、A0 = 1C:A1 = 1、A0 = 0 D:A1 = 1、A0 = 1●8088与8255连接时的写控制字地址是( D )。
A:100H B:101H C:102H D:103H●8086与8255连接时的B口读写地址是( B )。
A:100H B:102H C:104H D:106H●8253写方式控制字时,地址线( D )。
A:A1 = 0、A0 = 0 B:A1 = 0、A0 = 1C:A1 = 1、A0 = 0 D:A1 = 1、A0 = 1●8253的计数器0读写操作时,地址线(A)。
A:A1 = 0、A0 = 0 B:A1 = 0、A0 = 1C:A1 = 1、A0 = 0 D:A1 = 1、A0 = 1●8253的控制字为85H,功能为( B )。
A:计数器0二进制计数B:计数器2十进制计数C:计数器0低8位初值D:计数器2高8位初值●8253的控制字为78H,计数器选择为( B )。
A:计数器0 B:计数器 1 C:计数器 2 D:无作用●8253的控制字为40H,工作方式选择为( C )。
A:方式0 B:方式 2 C:方式 4 D:方式5●8259固定优先权方式的中断请求信号IR0—IR7的优先权顺序为( A )。
A:IR0→IR7 B:IR7→IR0C:IR0→IR7→IR-1 D:每个中断请求信号等优先权。
微机原理及接口第9章习题解答

第9章习题解答1、选择题(1)在数据传送过程中,数据由串行变并行或由并行变串行,其转换是通过()A.锁存器B.加法器C.移位寄存器D.数据寄存器(2)在远距离串行通信中,采用调制技术是为了使信号()A.强度加大B.不失真传送C.一位一位传送D.有条不紊传送(3)微处理器通过数据总线向慢速外设输出数据时,接口部分必须含有的部件是()A.反相器B.放大器C.锁存器D.TTL/EIA电平转换器(4)串行接口与设备之间的数据传输是以串行方式并且以()A.单工方式进行的B.半双工方式进行的C.全双工方式进行的D.半/全双工方式进行的(5)甲乙两台计算机近距离通过RS一232C口进行通讯时,常采用最简单的三线联结。
即是()A.甲机的TXD、RXD、GND分别与乙机的TXD、RXD、GND相连B.甲机的TXD、RXD、GND分别与乙机的RXD、TXD、GND相连C.甲机的RTD、TXD、RXD分别与乙机的RTS、TXD、RXD相连D.甲机的DSR、RXD、DTR分别与乙机的DSR、RXD、DTR相连2、什么是比特率、波特率?解:比特率指每秒传送的二进制位数。
波特率指每秒传送的信息位数量。
3、如果串行传输速率是2400波特,数据位的时钟周期是多少秒?数据位的时钟周期是 = 4.17×10-4秒4、若8251A的收发时钟(RxC、TxC)频率为38.4KHz,它的RTS和CTS 引脚相连。
工作在半双工异步通信,每帧字符的数据位数为7,停止位数为1,偶校验,波特率为600b/s,处于发送状态。
写出初始化程序,其端口地址为02C0H和02C1H。
38.4K = n * 600 ,得分频系数为64MOV DX,02C1HMOV AL,01111011 ;方式字OUT DX,ALMOV AL,00110001 ;控制字OUT DX,AL5、设8251A为异步工作方式,波特率因数为16,7位/字符,奇校验,两位停止位。
《微机原理》课程大纲
《微机原理》课程教学大纲一、课程名称(中英文)中文名称:微机原理英文名称:Principle of Microcomputer二、课程编码及性质课程编码:0800305课程性质:专业核心课,必修课三、学时与学分总学时:32学分:2.0四、先修课程电路理论、模拟电子技术、数字电子技术、C语言及其编程五、授课对象本课程面向材料成型及控制工程专业学生与电子封装技术专业学生开设,也可以供材料科学与工程专业选修。
六、课程教学目的(对学生知识、能力、素质培养的贡献和作用)《微机原理》是材料加工工程专业学生必修专业课程之一,其教学的主要目的包括:1、通过一门理论性、实践性和实用性很强的职业技能课程,增强学生的分析问题能力、编写程序能力与动手能力。
2、深入了解单片微型计算机的原理与结构,为今后成型设备开发打下牢固的理论基础。
3、系统掌握单片机的指令系统、接口技术和一般应用开发方法,为今后设计实际的单片机应用系统打下牢固的理论基础。
4、了解微型计算机技术的发展前沿,掌握其发展特点与动向,具备研发单片机的基础与能力。
表1 课程目标对毕业要求的支撑关系七、教学重点与难点:教学重点:1)当今计算机技术飞速发展,本课程以介绍单片微型计算机中最典型的8051为主体、以讲述单片机结构与应用为重点;2)在全面了解与掌握单片微型计算机种类及结构特点的基础上,重点学习汇编语言开发单片微型计算机技术;3)课程将重点或详细介绍新颖的流行的微型控制器及其开发方法,为同学提供更多的实践机会;4)重点学习的章节内容包括:第2章“单片机的结构和原理”(4学时)、第3章“单片机的指令系统”(4学时)、第4章“汇编语言程序设计基础”(8学时)、第6章“单片机的定时/计数器”(8学时)。
教学难点:1)单片机原理与接口技术课程是实践性极强的课程之一,本课程将密切结合学生的生产实习、课程设置、实验课等实践环节,培养学生对单片微型计算机的认识及设计能力,提高授课质量与效果。
微机原理与接口技术9章8253

定时器/计数器
• 主要内容
– 定时与计数 – 可编程定时器/计数器接口芯片8253
定时与计数
• 定时技术在微机系统中必不可少
– 微机的工作在标准时钟控制下完成 – 为外设提供实时时钟 – 向外设定时发出控制信号
• 定时中断、定时检测、定时扫描、定时显示……
– 对外部事件进行计数
定时与计数
• 定时与计数
可编程定时/计数芯片8253
• 8253的工作方式
– 方式4——软件触发的选通信号发生器
• 波形图
可编程定时/计数芯片8253
• 8253的工作方式
– 方式4——软件触发的选通信号发生器
• 工作特点
– 计数由软件启动,每次写入计数初值只启动一次 计数 – 当计数值为N时,则间隔N+1个CLK脉冲输出一 个负脉冲(计数一次有效) – 在计数过程中,可由GATE信号控制暂停。当 GATE=0时,暂停计数;当GATE=1时,继续计 数 – 在计数过程中写入新的计数初值,则按新的初值 重新开始计数
可编程定时/计数芯片8253
• 8253的工作方式
– 方式5——硬件触发的选通信号发生器
• 波形图
可编程定时/计数芯片8253
• 8253的工作方式
– 方式5——硬件触发的选通信号发生器
• 工作特点
– 计数由GATE上升沿启动,只要GATE端给触 发脉冲,则会装入计数值,并开始计数 – 在这种方式下,若设置的计数值是N,则在 GATE脉冲后,经过(N+1)个CLK,OUT端 才输出一个负脉冲 – 在计数过程中修改计数初值,不会影响本次计 数,只有GATE端再次触发时,才按新的计数 值计数
微机原理与接口技术
第九章 8253
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(串行接口部分)
§9.4 串行接口的基本概念 §9.5 异步串行通信接口标准RS-232C
§9.6 可编程串行接口芯片INS 8250
1
第九章 并行接口与串行接口串口基本概念_1
§9.4 串行接口的基本概念
所谓串行通信是指外设和计算机之间在单根数据 信号线上一位接一位地传输数据,每一位数据都占 据一个固定的时间长度(T)。 数据流 D0 D1 D2 D3 D4 D5 D6 D7 0 1 0 0 1 1 0 1 T
按待传输的数字信号的变化规律去改变载波(音频模拟信号) 的频率f、幅度A或相位φ。如下图所示:
9
第九章 并行接口与串行接口串口基本概念_9
用得最多的是调频方法,频移键控调制原理示意图:
音 f1 频 信 号 f2 数字信号
电子开关1
∑
电子开关2
+
输出 运放 …
0
1
1
0
1
0
1
1
0
1
数字信号为1时,电子开关1导通,输出f1音频信号; 数字信号为0时,电子开关2导通,输出f2音频信号; 传输距离:普通电话线,不失真传输500m左右; 同轴电缆,可达1.5~2Km以上。
波特率=1/T
国际上规定了一个标准波特率系列: 50、110、300、600、1200、1800、2400、4800、 9600、19.2K、56K、115.2Kbps等。
4
第九章 并行接口与串行接口串口基本概念_4
② 收/发时钟
在串行通信中,发送与接收都必须有时钟脉冲信 号对传送的数据进行定位和同步控制。如图示:
“串行”是指外设与接口电路之间的信息传送方
式,CPU与串行接口之间仍按并行方式工作。
2
第九章 并行接口与串行接口串口基本概念_2 1、串行数据传送方式
发送器
数据
接收器
单工(Simplex)方式: 只允许数据按照一个固定 的方向传送。 半双工(Half-duplex)方式: 只用1根数据线传送数据信 号,通信双方不能在两个方 向上同时传送。 全双工(Full-duplex)方式: 通信双方能同时进行发送 和接收操作。
3
收发器
数据
收发器
收发器
数据 数据 收发器
第九章 并行接口与串行接口串口基本概念_3 2、波特率和收/发时钟 ① 波特率 在计算机串行通信中,用波特率(数据位率)来描述 数据的传输速率。波特率是指每秒钟传送二进制数据 的位数,以位/秒为单位,简写为bps。如图示: 数据流 位周期 D0 D1 D2 D3 D4 D5 D6 D7 0 1 0 0 1 1 0 1 T
数据线 (SIN) 起始位(16t) t 8t 16t
6
时钟 (RCLK)
t为时钟周期,表明16个时钟脉冲传送1位数据。
第九制和解调
之前提及的串行通信都是针对数字信号的,数字 信号的频带宽,而普通通信线路频带较窄,如电话 线频带范围仅300~3000Hz。 故采用普通通信线路进行远程数据通信时,需要 在发送端用调制器(Modulator)把数字信号转换为 模拟信号,模拟信号经通信线路传送到接收方;接 收方再以解调器(Demodulator)把模拟信号还原成 数字信号。 大多数情况下(支持双工方式),将调制器和解调 器整合在一个装置中,称为调制解调器:Modem 。
并串移位寄存器 发送 时钟 发送缓存器 发送端 发送数据 接收缓存器 接收数据 接收端 通信 线路 串并移位寄存器 接收 时钟
串行通信简单原理图
5
第九章 并行接口与串行接口串口基本概念_5 收/发时钟频率通常是波特率的整数倍(称为波特率因 子n),二者之间的关系如下: 收/发时钟频率 = n×波特率 (n取1、16、32、64等) 异步通信:n=16; 同步通信:n=1。 例如:波特率=9600bps,波特率因子n=16,如图示:
7
第九章 并行接口与串行接口串口基本概念_7 远程通信示意图:
计 算 机 (1) 另 一 种 示 意 方 法 DTE(Data Terminal Equipment):数据终端设备(接收和发送), 微机串行通信接口电路,如INS 8250、INS 16550A等。 DCE(Data Communication Equipment):数据通信设备(传输)。 控制 M 串 收 O 行 D 发 接 E M 口 电话线 控制 M 发 串 O 行 D 收 接 E M 口 计 算 机 (2)
检错、纠错方法很多,都以增加冗余信息为代价。
11
第九章 并行接口与串行接口串口基本概念_11 5、串行通信的基本方式 串行通信分为两种基本方式:异步通信、同步通信
异步通信 • 收、发端时钟为各自独立的同频时钟。 • 以字符为单位一个一个地传输,每个字符中一位 接着一位地传输。 • 传输一个字符时,以起始位开始,然后传输字符 数据位、校验位,以停止位结束该字符的传输。 • 一次传输的起始位、字符数据位、校验位、停止 位构成一组完整的信息,称为帧(Frame)。 • 帧与帧之间可以有任意个空闲位。
音频模拟信号
8
第九章 并行接口与串行接口串口基本概念_8 调 调频(FM):频移键控FSK(Frequency Shift Keying)法 制 调幅(AM):幅移键控ASK(Amplitude Shift Keying)法 方 法 调相(PM):相移键控PSK(Phase Shift Keying)法
10
第九章 并行接口与串行接口串口基本概念_10 4、数据传输的检错和纠错 串行数据在传输过程中,由于硬件、软件故障或外 界电磁干扰,可能引起数据传输错误。
误码率:衡量传输错误的指标,即数据传输后出错的位数与 总传输位数之比(计算机通信中要求10-6数量级)。 差错控制 检错:如何发现传输中的错误; (编码) 纠错:发现错误后,如何消除错误。 自动重发请求ARQ(Automatic Repeat reQuest) 接收方检测到接收数据有错,请求发送方重发。 控制方式 前向纠错FEC(Forword Error Correction) 接收方可检错也可纠错,不需向发送方反馈信息。 具体方法:奇偶校验、循环冗余码校验(CRC)、海明码校验等。 最简单、常用的检错方法是奇偶校验。