欧姆龙step和snxt指令
欧姆龙step和snxt指令 -回复
欧姆龙step和snxt指令-回复欧姆龙(Omron)是一家领先的自动化控制解决方案提供商,致力于为全球范围内的制造业提供高效、可靠和创新的产品。
在欧姆龙产品线中,欧姆龙STEP和SNXT指令是两个重要的编程工具,它们为自动化控制系统的开发提供了强大的支持。
在本文中,我们将深入探讨欧姆龙STEP和SNXT 指令的功能和用法,并逐步解释如何使用它们。
一、欧姆龙STEP指令1. 功能和用途欧姆龙STEP指令用于控制步进电机的运动。
步进电机是一种特殊的电机,它可以按照预定步长或角度进行旋转。
STEP指令可以设置步进电机的步数、方向和速度,从而精确控制步进电机的转动。
2. 语法STEP指令的语法如下:STEP Dn+, Sn+, Tn+Dn+:指定步进电机驱动器的编号;Sn+:指定步进电机的步数;Tn+:指定步进电机的转速。
3. 示例以一个简单的步进电机控制为例,假设我们有一个步进电机,驱动器的编号为D1,需要让步进电机顺时针旋转2000步,并以每分钟1000转的速度旋转。
可以使用以下代码控制:STEP D1+, 2000, 1000二、欧姆龙SNXT指令1. 功能和用途欧姆龙SNXT指令用于与串行通信设备进行通信。
通过SNXT指令,用户可以发送和接收数据,实现与外部设备的数据传输和交互。
这在自动化控制系统中非常有用,可以实现与其他设备的联动控制。
2. 语法SNXT指令的语法如下:SNXT "Function Code", Dn+, Sn+, Address, Length"Function Code":指定SNXT指令的功能码;Dn+:指定串行通信设备的编号;Sn+:指定发送或接收的数据区域编号;Address:指定读取或写入数据的起始地址;Length:指定要读取或写入的数据长度。
3. 示例以与PLC进行数据交互为例,假设我们要从PLC的地址D100读取10个数据,并将其存储到数据区域S1。
欧姆龙PLC编程指令篇
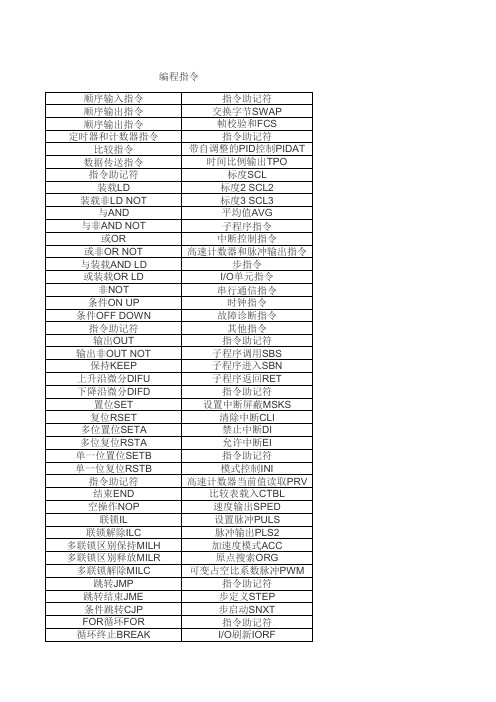
置位SET 复位RSET 多位置位SETA 多位复位RSTA 单一位置位SETB 单一位复位RSTB 指令助记符 结束END 空操作NOP
联锁IL 联锁解除ILC 多联锁区别保持MILH 多联锁区别释放MILR 多联锁解除MILC
跳转JMP 跳转结束JME 条件跳转CJP FOR循环FOR 循环终止BREAK
输入比较指令 (带符号)
LD,AND,OR+=+S LD,AND,OR+<>+S LD,AND,OR+<+S LD,AND,OR+<=+S LD,AND,OR+>+S LD,AND,OR+>=+S
输入比较指令 (双字长,带符号) LD,AND,OR+=+SL LD,AND,OR+<>+SL LD,AND,OR+<+SL LD,AND,OR+<=+SL LD,AND,OR+>+SL LD,AND,OR+>=+SL
有进位双字BCD加法+BCL 无进位带符号二进制减法- 无进位带符号双字二进制减法
-L 有进位带符号二进制减法-C 有进位带符号双字二进制减法
-CL 无进位BCD减法-B 无进位双字BCD减法-BL 有进位BCD减法-BC 有进位双字BCD减法-BCL 带符号二进制乘法* 带符号双字二进制乘法*L
BCD乘法*B 双字BCD乘法*BL 带符号二进制除法/ 带符号双字二进制除法/L
求补COM 双字求补COML
指令助记符 算术处理APR
位计数器BCNT
指令助记符
LD,AND,OR+= LD,AND,OR+<> LD,AND,OR+< LD,AND,OR+<=
LD,AND,OR+>
第10章 欧姆龙CPM1A系列PLC步进控制指令
湖北祥辉电气自动化培训中心
步进控制指令 步进控制程序的结构 步进控制程序的编程
步进控制概述
把一个较大的程序分成若干个程序段(对应实际的某 些操作)。一个程序段称为一个步,用指令来控制各 步执行的顺序——步进控制程序。
步C开始
25313
01002 步C
功能:步结束指令。 当所有步都执行完毕时,要 安排SNXT(09) B (B是虚控 制位、无实际意义)和 STEP 指令以结束步程序 。
二、 步进控制程序的结构
1. 步进程序的基本结构
每一 步都由具有执行条件的 SNXT(09) B开始,其后紧随 无执行条件的STEP(08) B。
STEP(08) B之后是步的内容
当执行步进程序时,在执行完上一步、启动下一步之 前,可将上一步使用的定时器、数据区等复位。这样, 在以下各步程序中还可以重复使用这些资源。
一、 步进控制指令
SNXT(09) B STEP(08) B
SNXT(09)B STEP(08) B
B:步的控制位号
STEP(08)
STEP(08)
功能:当SNXT指令的执行 条件为ON时,结束上一步 的执行、复位上一步用过的 定时器和数据区,并启动以 B为控制位的、以STEP B定 义的下一个步。
HR0001
启动步B
25313
STEP(08) HR0001
步B开始
01001 步B
00003 SNXT(09) HR 0004
STEP(08) HR 0002
复位步B 启动步E
25313
01002 步C
00004 SNXT(09) HR 0003 STEP(08) HR 0003
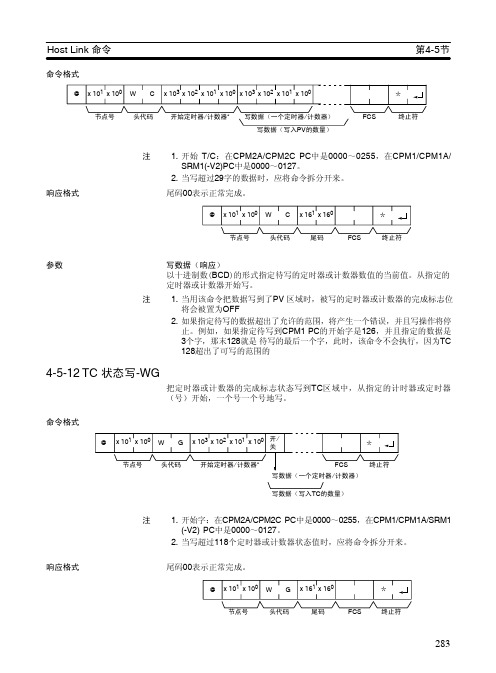
欧姆龙PLC编程手册(中文)04
命令格式
@ x 101 x 100 R # OP1 OP2 OP3 OP4 x 103 x 102 x 101 x 100
*
节点号
头代码
名称
TC号*
FCS
终止符
响应格式
注 TC 号:在CPM2A/CPM2C PC中是0000~0255;在CPM1/CPM1A/SRM1(-V2) PC中是0000~0127
2. 当写超过29个字的数据时,应将命令拆分开来。
尾码00表示正常完成。
@ x 101 x 100 W D x 161 x 160
*
节点号
头代码
尾码
FCS
终止符
注 CPM1/CPM1A PCs中的DM1024~DM6143 和CPM2A/CPM2C /SRM1(-V2)PCs 中的DM 2048~DM 6143这些字不能被定义。如果企图写这些字中任何一个字, 对这些字的写操作将不执行,且命令正常结束。
节点号
头代码
程序地址
名称
TC号
响应格式 参数
288
OP1 OP2 OP3 OP4 x 103 x 102 x 101 x 100
*
操作数
SV
FCS
终止符
注 TC号:在CPM2A/CPM2C PCs中是0000~0255;在CPM1/CPM1A/SRM1(-V2) PCs中是DM0000~0127
尾码00表示正常完成
名字
指令名
OP1
OP2
OP3
OP4
T
I
M
空格
定时器
T
I
M
H
高速定时器
T
I
M
L
长定时器
欧姆龙指令

CPM2AH日的一般规格注注: 1. CPU单元上的服务电源24V DC只能给输人设备使用。
(不能用来驱动输出设备)2.如果服务电源的电流超过额定电流值,或者有短路的情况,则服务电源电压将下降或PC操作停止。
3.若安装了CPM 1A .MAD01∕CPM l A-MADl1∕CPM 1A-TS102∕CPMIA-DA041单元.CPU单元上的服务电源24V DC的电流不应超过200MA。
4.若安装了2或3个CPM l A-DA041单元,该服务电源不能使用。
CPM2AH的I∕O规格注:在PC设置中,能设置输入时间常数1、2、3、5、10、20、40或80ms。
高速计数器输入如下表所示,输入位IN00000~-IN00002可作为高速计数器输入。
相位差输人模中断输入输入位IN00003~IN00006可被用于作中断输入(中断输入模式或计数模式)和快速响应输入。
这些输入的最小脉宽为0.05ms。
CPM2AH指令CPM2AH和CPM2C支持119条基本指令和特殊指令梯形图指令数据传送命令位控制指令递增∕递减指令顺序控制指令定时器∕计数器指令运算指令注:1.扩展指令带缺省功能代码2.CPM 1A不支持这些指令比较指令转换指令中断指令脉冲控制指令脉冲输出控制指令表格数据操作指令I∕O单元指令通信指令步进指令数据控制指令逻辑指令故障诊断指令特殊运算命令显示功能指令子程序指令进位标志指令注:1.扩展指令带缺省功能代码2.CPM1A不支持这些指令3.指令在CPM2A中得到改进模拟量I/O单元CPM2AH的性能规格。
Omron 步进指令注解

PULS指令格式:PULS(65)PCN其中:操作数P为口定义符,用来定义脉冲输出位置。
P=000时为单相不带加减速脉冲输出0(01000)或单相带梯形加减速脉冲输出0(01000和01001)。
P=010时为单相不带加减速脉冲输出1(01001)操作数C为脉冲形式控制字。
C=000时为相对脉冲;C=001时为绝对脉冲。
P=010和C=001不用于CPM2A。
操作数N为脉冲数,可以是IR、SR、HR、AR、LR、DM、*DM。
功能:脉冲输出设置指令。
用来设定SPED和ACC指令输出的脉冲数。
八位BCD码脉冲数放在N和N+1通道中。
N中放低四位,N+1中放高四位。
取值范围是-16 777 215~16 777 215。
SPED指令格式:SPED(65)PMF其中:操作数P为输出点设定,可以取000或010。
操作数M为输出模式设定,可以取000或001。
操作数F为脉冲频率设定,四位BCD码,可以是IR、SR、HR、AR、LR、DM、*DM、#。
功能:脉冲速度设置指令。
单相脉冲只能通过01000和01001两个端子输出,且同一时刻只能有一路输出。
输出端子由P指定。
P=000时,输出为01000;P=010时,输出为01001。
脉冲输出有两种模式。
当M=000时为独立输出模式。
在此模式下,用PULS指令设定输出脉冲总数,用SPED指令启动脉冲输出的开始。
输出的脉冲数达到PULS指令所指定的数目时脉冲输出停止。
当M=001时为连续输出模式,在此模式下,只能通过SPED指令中的F=0000的设置或INI指令来停止脉冲输出。
独立输出模式的脉冲输出一但开始就不能再用PULS指令来改变已设定的脉冲数。
而连续输出模式在输出过程中可以随时使用SPED指令来改变输出频率。
该频率由F的值设定。
F的取值范围为0001~1000对应的输出频率是10 Hz~10 kHz(CPM1A:0002~0200对应的输出频率是20 Hz~2 kHz)。
欧姆龙cp1e顺序步进控制完整注释

W3.03 I:0.04 70.04
000042 (000121)
产品通过了
<70.04> a122 a124 a133 b138 <c70> c015
产品送完 检测
70.04
产品通过 了
000043 (000124) 70.04 I:0.04 50.03 50.04 TIM
完成一次吸料
<70.02> a107 <c70> c015
P_On 常通标志
CF113 I:0.06 I:0.04
000021 (000061)
SET 80.03
吸料气缸进位
<80.03> a068 a179 <c80> c016 [OP1]
P_On 吸料气缸 产品送完 检测 常通标志 到位
I:0.06 50.03 50.04 80.03
复位
I:0.00 SNXT
(009)
复位步 复位步
[OP1] <50.00> a001 b003 a025 a032 <50.01> a002 b026 a041 <50.02> a151 a153 <50.03> b036 b048 b066 b071 b083 b089 b102 b108 b126 b140 a155 a157 b170 b174 b185 <50.04> a005 b037 b056 b067 b080 b084 b099 b103 b118 b127 b145 a160 b171 b175 b186 [OP2] [OP3]
STEP
(008)
吸料气缸上步
SFC编程
欧姆龙自动化(中国)有限公司营业技术中心2012年2月SFC编程介绍目录一、SFC编程介绍 (1)二、SFC的结构 (3)(一)、SFC步的介绍 (3)(二)、SFC的转移分类 (3)(三)、动作块 (7)(四)、SFC编程的一些规则 (10)(五)、SFC任务控制指令 (10)三、SFC编程示例 (11)一、SFC编程介绍PLC编程语言主要有以下几种,梯形图(LAD)、指令表(LI)、顺序功能图(SFC)、结构化编程语言(ST)、功能块(FB),大家最熟悉的一般是梯形图和指令表。
这五种编程语言都是符合IEC61131-3标准的编程语言(IEC61131是世界范围内第一个实现标准化的用于PLC系统的编程语言标准规范)。
PLC最初的出现是为了取代继电器控制系统,用软元件的逻辑运算来代替硬接线逻辑,以满足工业产品型号规格的不断变化及批量小、交货期短的市场需求。
因此早期PLC的软件功能比较简单,主要进行“与”、“或”等基本的逻辑运算。
用PLC的基本逻辑指令进行编程,其基本的设计方法同继电器-接触器控制系统的设计方法是相似的,通常有经验设计法和逻辑设计法两种。
经验设计法自然与设计者的经验有关,要求设计者有丰富的设计经验、熟悉比较多的控制线路等,尽管如此,在联锁比较复杂的情况下,也难免出现设计漏洞,理论上不能保证设计的完备性。
逻辑设计法比较复杂,一般设计人员难以掌握,虽然从理论上讲是完备的,但实际在设计过程中同样要渗进不少经验和人为的因素,尤其在工序步进动作比较复杂的情况下更是如此。
顺序功能图(SFC)的出现解决了以上困难:SFC:Sequential Function Chart顺序功能图,也称为顺序功能流程图,是一种强大的描述控制程序的顺序行为特征的图形化语言,可对复杂的过程或操作由顶到底地进行辅助开发。
SFC允许一个复杂的问题逐层地分解为步和较小的能够被详细分析的顺序。
(一)梯形图编程的难点:1、一是梯形图编程中需要考虑复杂的电路互锁信号,这样就往往是程序设计者由于考虑不周到而忘掉复位的信号,增加了编程人员的负担。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
欧姆龙step和snxt指令
欧姆龙PLC(Programmable Logic Controller)是一种广泛使用的工业控制设备,其指令系统对于PLC编程至关重要。
在欧姆龙PLC中,Step和SNXT是两个常用的指令。
1.Step指令
Step指令是欧姆龙PLC中的顺序控制指令,用于实现程序的顺序执行。
它允许用户按照特定的顺序执行一系列的操作,从而实现控制逻辑。
Step指令通常用于控制设备的启动、停止、切换等操作。
使用Step指令时,用户需要定义一系列的步骤,每个步骤代表一个特定的操作或状态。
然后,通过控制Step指令的执行,可以按照设定的顺序依次执行这些步骤。
这样,用户就可以通过简单的顺序控制实现对复杂工业过程的控制。
2.SNXT指令
SNXT指令是欧姆龙PLC中的条件转移指令,用于根据条件判断来改变程序的执行流程。
它允许用户根据一定的条件判断,选择性地执行某些操作或跳转到特定的程序段。
使用SNXT指令时,用户需要定义一个或多个条件判断,并根据这些条件判断的结果来决定程序的执行流程。
例如,当某个输入信号发生变化时,可以使用SNXT指令来判断是否满足某个条件,如果满足则执行相应的操作或跳转到特定的程序段。
SNXT指令的灵活性和可编程性使得它在工业控制中得到了广泛的应用。
通过合理地使用SNXT指令,可以实现复杂的逻辑控制和条件判断,提高程序的效率和可靠性。
总之,欧姆龙PLC中的Step和SNXT指令是两个非常重要的指令,它们分别用于实现顺序控制和条件转移。
通过合理地使用这两个指令,可以实现对复杂工业过
程的精确控制和灵活调整。
在实际应用中,需要根据具体的控制需求和设备特性选择合适的指令和编程方式,以实现最佳的控制效果。