基于PLC的等离子弧焊控制系统
基于人机界面的PLC控制焊接自动化系统
第28卷 第5期2006年10月三峡大学学报(自然科学版)J of China Three G orges Univ.(Natural Sciences )Vol 128No.5Oct 12006收稿日期:2005212220作者简介:黄敬尧(1963-),男,副教授,主要研究方向为电力电子、计算机控制技术及智能仪器仪表.基于人机界面的PLC 控制焊接自动化系统黄敬尧 施保华(三峡大学电气信息学院,湖北宜昌 443002)摘要:根据生产企业的技术要求,设计制造出基于PL C 的自动化焊接工作台.该工作台的旋转和进退运动采用步进电动机及驱动器控制,保证较高的定位精度及较高的性价比.控制中心采用可编程控制器(PL C )和触摸式液晶显示人机界面,可实现平面复杂焊点的全自动焊接.关键词:自动化焊接; 可编程控制器; 点焊机中图分类号:TP273 文献标识码:A 文章编号:16722948X (2006)0520448203Automatic Welding System with PLC B ased on HMIHuang Jingyao Shi Baohua(College of Electrical Engineering &Information Science ,China Three G orges Univ.,Y ichang 443002,China )Abstract An automatic welding workbench wit h a p rogrammable logic cont roller (PL C )is designed and made for t he company ’s need.The workbench ’s rotation and advance and ret reat movement are driven by t he step motors and t he special cont roller ;t hus t he workbench has highly oriented precision and nice performance.The PL C and t he to uch pane are used in t he equip ment ,so t he complex welding can be carried out automatically.K eyw ords automatic welding ; programmable logic cont roller (PL C ); welding machine1 现状及系统要求概要环保型低噪音系列锯片基体为某公司重点畅销产品.该产品突破传统锯片基体制造方法,采用2张相同金属基体中间夹一层阻尼材料(三明治复合锯片基体),有效地解决了环保消音降噪问题.自主设计研发基于人机界面的PL C 控制焊接自动化系统可以将其三合一,而且能使焊接部分与非焊接部分硬度均匀一致,在提高效率的同时,解决了焊后变形大的问题.原加工方式为手工焊接,为保证定位准确和防止工件变形,自制工件夹具.工件尺寸规格较多,焊点位置要求灵活多变.手工焊接工作量较大,而且难于保证焊接质量.现要求设计焊接自动化工作台,提高产品加工质量和加工效率.自动化工作台主要完成旋转、前进后退和抬升动作.自动化焊接过程满足焊接工艺(隔点焊接,内外圈焊点错位和工件压紧防变形)要求.项目研发的系统将从焊点分布、焊接顺序、时间、电流、温度、受力和平面度等方面保障基体质量,使焊接部分与非焊接部分硬度均匀一致,解决焊后变形问题,并提高生产效率,降低次品率,从而提高生产的经济效益,也使得整个技术和管理的自动化水平提高.2 电气控制方案全自动工作台的旋转和进退运动采用步进电动机及驱动器控制,保证较高的定位精度及较高的性价比.控制中心采用可编程控制器(PL C )和触摸式液晶显示屏,可实现平面复杂焊点的全自动焊接.(1)可编程控制器特点可编程控制器是一种数字运算操作系统,专为工业环境下应用而设计,有较强的抗干扰能力.它采用了可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字式或模拟式的输入和输出,控制各种类型机械的生产过程[1].正是由于可编程控制器是一种工业控制计算机,其控制操作功能通过软件编制确定,在生产工艺改变或生产线设备更新时,可不必改变PL C硬件设备,只需改变编程程序就可改变控制方案,具有良好柔性.(2)触摸式液晶显示屏随着工业自动化的发展,基于PL C、单片机和PC 机的自动化系统与自动化设备越来越普及,几乎遍布所有自动化领域,与之相应的人机交互系统也应运而生,并得到同步发展,工业触摸屏液晶显示器是人机交互系统中一颗耀眼的明星.高可靠、长寿命、高性能使触摸屏越来越受到自动化系统集成商、自动化设备制造商的青睐.触摸屏作为一种新型的人机界面,从一出现就受到关注,它的简单易用,强大的功能及优异的稳定性使它非常适合用于工业环境.TP170A触摸屏是工业触摸屏领域的优秀代表,它能够理想、生动地显示PL C、单片机、PC机上的数据信息,并直接支持市面上大多数的PL C产品,功能强大,使用方便.(3)步进电动机及驱动器步进电动机具有快速起停、精确步进以及能直接接收数字量的特点,所以在工业过程控制和精确定位场合得到广泛应用.SJ22H80M驱动器驱动二相混合式步进电机,该驱动器采用原装进口模块,实现高频斩波,恒流驱动,具有很强的抗干扰性、高频性能好、起动频率高、控制信号与内部信号实现光电隔离、电流可选、结构简单、运行平稳、可靠性好、噪声小,带动8.0A以下所有的110B YG、130B YG系列电机二相混合式步进电机.图1是电气控制系统框图.前进和后退由两台步进电机控制,汽缸的升起落下由电磁换向阀实现.一般的伺服驱动系统由专用控制面板实现,功能强大,但是操作复杂,只能由专门技术人员操作.采用人机界面+PL C控制方案,可靠性高,操作界面简单,一般工人就可熟练操作.图1 电气控制系统框图3 固定点焊机全自动工作台系统组成及工作原理加工工件如图2所示.首先,将工件夹紧后放到工作台上.工作台自动前进,到位后进行外圈焊点的隔点焊接加工.外圈焊点加工完成后,工作台前进,到位后进行内圈焊点的隔点焊接加工.在工作台前进或旋转过程中,汽缸抬起工件.焊接时,控制汽缸使工件落下.整个工件加工完成后,工作台自动退回原位.图2 工件1加工示意图由于工件内圈焊点离工件中心太近,焊接电极有一定的直径,常规中心驱动设计会导致工件径向进给无法到位,影响工件内圈焊点自动化焊接的实现.现采用心轴定位、外圆周驱动方式原理.加工过程中相邻两焊接点之间必须有一个辅助升降运动,现利用4个汽缸及驱动块上4个压紧装置实现该辅助运动并起水平支撑作用.固定点焊机全自动工作台的控制方案有3种:自动化加工流程,手动加工流程和新工艺参数设定.在工作过程中,需要设置的参数较多,如几十种工件选择、工件半径输入、焊点数输入等.采用传统控制面板几乎无法实现.4 控制方案设计概要触摸式液晶显示屏接受加工工艺信息,如工件直径、焊点数和焊接电流,如图3所示.然后,由PL C计算出焊点位置,控制两台步进电动机按要求完成自动化加工过程.也可事先存储几十个加工信息,供加工时选用.增加手动后援,加工少量焊点可手动按键操作.(1)人机界面程序设计人机界面采用西门子基于Windows的触摸面板TP170A,软件用SIMA TIC Protool.Pro Tool/Pro CS944第28卷 第5期 黄敬尧等 基于人机界面的PL C控制焊接自动化系统图3 工艺参数类型用于组态计算机上Windows 创建组态.Pro Tool/ProR T 是用于运行组态和使在Windows 下过程可视化的程序.也可以在组态计算机上使用Pro Tool/Pro R T 测试和模拟生成的项目文件.Protool提供了多种控制器件库、图形控件和功能组件,通过组态出各种显示和控制功能,实现系统操作状态、当前过程值及故障的可视化.利用人机界面操作被监控系统,对PL C 中的实时数据进行显示、记录、存储、处理,从而满足各种监控要求.主画面如图4所示.图4 主画面(2)PL C 程序设计S72226型PL C 在其编程软件STEP72Micro Win SP3的运行环境中可用语句表(STL )或梯形图(L AD )进行编程,编译通过后可由PC/PPI 通讯电缆下载到PL C [2].程序由主程序、子程序和中断程序3部分组成.主程序主要完成工件选择、手动加工及新工艺参数设定程序的入口转换.带参数的子程序工件加工过程.步进电动机由另外两个子程序按启动加速、运行和停止减速3段过程进行控制.(3)PL C 插补算法为了减小传动误差,外圆旋转采用一级齿轮传动.经推导外圆旋转一周,步进电动机需要5840个脉冲.工件规格较多,焊点数从20到80点不等.例如25点工件,若直接运算5840/25=233.6,PL C 只能做整数运算,步进电动机接受整数个脉冲,忽略小数将产生较大的积累误差.采取的算法如下,可以完全克服小数积累误差.设N 为焊点数,k 为计数值,y 为步进电动机脉冲数.则y k+1=5840×(k +1)N-5840×kN以上算式做整数运算结果如表1所示.整数运算结果表明外圆旋转一周,步进电动机脉冲总数为5840,没有累计误差.表1中,k 为焊点数,表中k 从第1点到第25点;CP 为步进电动机脉冲数,CP 表示两个焊点的距离.表1 整数运算结果k123456789101112CP 233234233234234233234233234234233234k13141516171819202122232425CP 2332342342332342332342342332342332342345 结 语PL C 控制焊接自动化工作台操作简单,人机界面友好,能适应小批量多规格产品的加工需要,加工精度高,加工产品质量稳定可靠.目前,该工作台投入使用效果良好.PL C 控制焊接自动化工作台的设计较好满足了合金钢圆锯片基体特殊焊接加工生产自动化要求,在同类产品的加工中有较大的推广价值,整体提高我国加工业自动化水平.参考文献:[1] 王兆义.可编程序控制器[M ].北京:机械工业出版社,2004.[2] 西门子(中国)有限公司.深入浅出西门子S7-200PL C[M ].北京:北京航天航空大学出版社,2005.[责任编辑 张 莉]054三峡大学学报(自然科学版) 2006年10月。
基于PLC的自动焊锡机控制系统设计毕业设计(可编辑)
基于PLC的自动焊锡机控制系统设计毕业设计基于PLC的自动焊锡机控制系统设计摘要随着现代技术的迅速发展,各种机械的应运而生,自动化已成为了社会发展的必然趋势,自动焊锡机也成为了工业生产中必不可少的产物。
为了提高自动控制系统的可靠性和设备的工作效率,设计了一套以PLC为核心控制器的自动焊锡机控制系统,用来取代以往的较复杂的继电器?接触器控制。
系统的核心部分采用了德国西门子公司生产的S7?200型PLC,因为在核心控制部分采用的是软件程序控制,从而在保证自动焊锡机正常运行这个要求的情况下,大大的提高了自动焊锡机故障检查与维修的方便性和容易性,同时还克服了手动操作带来的一些人为干扰因素,取得了良好的预期效果。
关键词:PLC,自动焊锡机,梯形图Design of automatic soldering machine control system based on PLC ABSTRACTWith the rapid development of modern technology, all kinds of machinery came into being, automation has become an inevitable trend ofsocial development, automatic soldering machine has also become an essential product of industrial production.In order to improve the reliability of the automatic control system and equipment efficiency, the design of automatic soldering machine control system of a PLC as the core controller, is used to replace the more complex relay - contactor control. The core of the system with the production of Germany's Siemens S7-200 PLC, as used in the core part of the software program control, thus ensuring the case of automatic soldering machine uptime requirements, greatly improves the automatic soldering machines convenience and ease of troubleshooting and maintenance, but also to overcome the manual operation to bring some human disturbance factors, achieved the desired effect.KEY WORDS: PLC,Automatic soldering machine,Ladder目录前言 1第1章概述 21.1 自动焊锡机的背景21.2 自动焊锡机的意义2第2章硬件设计 42.1 自动焊锡机的结构及控制过程 42.2 PLC简介 52.3 PLC工作原理 62.4 PLC的选取82.5自动焊锡机I/O分配表92.6 自动焊锡机外部接线图10第3章软件设计113.1 自动焊锡机PLC控制顺序流程图11 3.2 STEP7-Micro/WIN32简介123.3 自动焊锡机梯形图143.4自动焊锡机语句表 20第4章组态王仿真画面234.1 组态王简介234.2设计监控画面254.3定义数据变量274.4变量动画连接294.5应用程序命令31结论33谢辞34参考文献35外文资料翻译36前言近年来我国的科技与经济飞速发展,工业生产水平也有很大的提高,自动焊锡机作为工业生产中必不可少的工具,与工业生产水平息息相关。
交流自动电焊机的plc控制
交流自动电焊机的plc控制毕业设计开题报告摘要随着焊接技术和控制技术的发展,等离子弧焊或MIG弧焊在自动控制下在铝及其合金方面工业生产中起着很大的作用;而作为新型的焊接方法等离子MIG焊,在国了较大的进步,国内却较少在这方向上进行研究。
本文所进行是利用等离子MIG焊这种新的方法,结合PLC进行自动焊接铝及其合金。
在设计中,控制系统的核心单元采用57一200型CPU以及对应1/0、Al产品;焊接电源分别选用了TPSS000型MIG电焊机ARGP300型T工G电焊机,对两的控制信号来进行协调控制;焊胎、送丝系统、冷却水循环系统、三维步进电机行走等设备均由PLC 进行控制;液晶触显示触摸屏提供了友好的人机界面。
同时,控制软件利用STEP7的模块化设计方法,设计了共计12套程序,10套为带有固定参数的分别适用于不同厚度的管及板的不同工件,另2套为不带参数的程序,以用作用户的二次开发。
1焊接自动化发展的特点随着自动化技术的飞速发展,大力地推动了焊接自动化技术的快速前进。
在焊接中,系统涉及的变量越来越多,如复杂的焊接冶金物理化学过程、合理的工艺流程制定与实现、焊接的稳定性、应用的灵活性、操作的安全性及设计的优化及经济性等方面,单凭人工完成的可能性及成功率,相对较低,有时甚至无法实现。
而利用自动化焊接技术中的控制技术,如开环、闭环等,可以方便地达到高质量的焊缝成形。
焊接自动化包括一以下几个方面:焊接检测,自动操作和自动调节2焊接自动检测自动检测是目前焊接自动化一个关键的环节。
国内外的一些大专校和科研院过大量的工作,对焊接过程中的光、声、电等信号都可以进行检测。
在光信号检测方面,R.J.BEATTIE等人在复杂焊接中采用视觉传感器阵/u’曰砂’获得理想的控制性能:Wang QL等人在脉冲GMAW焊过来检测人用焊接过程的检测;W.ChenB.A.Chin运用红外等等各方面的应用〔月一’0]。
国内的一些科研单位及一些人员,发展,做了一些相关研究,如殷树言等人做的粗丝,COZ利用CCD进行熔滴过渡的拍摄;王其隆等人做的钢焊丝弧与过渡实验,采用视觉传感器进行熔滴过渡中电弧燃烧情况的深层分析等等3焊接自动调整为了保证焊接质量,通常在焊接过程中的某些变量能自动保持定的范围内进行调整,即焊接自动调整。
基于PLC的焊接机器人控制系统设计

基于PLC的焊接机器人控制系统设计扬州大学广陵学院本科生毕业设计毕业设计题目学生姓名专业班级指导教师完成日期摘要焊接机器人作为工业机器人应用的一个重要领域,对提高企业的工作效率、提升产品质量、降低企业的生产成本等方面都有着非常重要的意义。
根据焊接机器人的控制需要,设计了基于PLC的焊接机器人控制系统。
焊接机器人控制系统是焊接机器人的核心部分,它是机器人控制柜和主控制柜以及夹具操作台之间通讯的桥梁,它可控制伺服的启动、暂停、旋转速度等,从而控制夹具翻转;可控制机器人和夹具之间的联动,使焊接动作能够自动的运行,并且能实现任意的暂停再启动和紧急停止再启动。
系统经过调试,联系焊接样件可知,本课题所设计的控制系统能良好的运行,适应各种环境干扰,能够较为准确的沿着示教的轨迹进行焊接,而且焊接质量达到了产品的质量要求。
关键字:焊接机器人、控制系统、PLC、伺服控制AbstractWelding robot as an important field of industrial robot applications, to improve the efficiency of enterprises, improve product quality, reduce the production cost of enterprises have a very important significance. According to the control of welding robot, designed a welding robot control system based on PLC. Welding robot control system is the core part of the welding robot, it is a bridge of communication between the robot control cabinet and main control cabinet and the jig operation platform, it can control servo motor start, pause, such as rotation speed, so as to control the fixture turnover; can control the robot and the linkage between the clamp, welding operation can be run automatically, and can realize any pause and restart and emergency stop and restart. The system after the debugging, the contact welding sample, control system designed by this paper can run in good, adapt to various environment interference, can accurately along the teaching track welding, and welding quality meets the quality requirement of products.Key words:Welding robot、control system、PLC、servo control目录第一章绪论 (1)1.1 引言 (1)1.2 焊接机器人的国内外研究现状 (1)1.3选题背景和意义 (2)1.4课题的主要研究内容 (3)第二章焊接机器人 (4)2.1 焊接机器人的组成 (4)2.2 焊接机器人的分类 (4)2.3 焊接机器人的常用控制方式 (7)2.4 焊接机器人的应用 (8)2.5 焊接机器人的发展趋势 (9)第三章控制系统 (10)3.1 伺服控制系统 (10)3.1.1 伺服控制系统的概述 (10)3.1.2 伺服控制系统的机构组成 (10)3.1.3 伺服控制系统的技术要求 (11)3.2 PLC控制系统 (11)3.2.1 PLC控制系统的概述及其特点 (11)3.2.2 PLC的基本结构及其分类 (13)3.2.3 PLC的型号选择 (20)3.2.4 PLC的性能指标与发展趋势 (24)3.2.5国内外PLC产品简介 (26)第四章硬件电路的设计 (28)4.1 PLC的选取 (28)4.2元器件的选择 (33)4.2.1断路器的选择 (33)4.2.2继电器的选择 (34)4.2.3 交流接触器的选取 (35)4.3 PLC的主控柜接线图 (37)第五章软件设计 (38)5.1 I/O的分配 (38)5.2 触摸屏的设计 (40)5.2.1 HMI的概述 (40)5.2.2 触摸屏画面的设计 (42)5.3 伺服控制 (47)5.4梯形图 (49)5.4.1程序梯形图见附录 (53)第六章系统安装与调试 (54)6.1引言 (54)6.2 焊接机器人的系统安装于调试 (54)6.2.1 焊接机器人的系统安装 (54)6.2.2 焊接机器人的调试 (54)6.3 机器人焊接实验 (55)6.3.1 焊接机器人的焊接实验 (55)6.3.2 焊接机器人实验及其结果分析 (58)6.4 小结 (59)第七章总结 (60)参考文献 (61)致谢 ........................................................................................................ 错误!未定义书签。
PLC在弧焊机器人控制系统中的应用
PLC在弧焊机器人控制系统中的应用闫海兰【摘要】弧焊机器人在现代制造业中的应用越来越广泛,且发挥着不可替代的作用.开发功能全面、开放性强、可靠性高的弧焊机器人控制系统至关重要.在分析和研究了国内外工业机器人控制系统的基础上,搭建了新型的弧焊机器人控制系统.整个系统由西门子315-2 DP PLC控制,机器人与PLC间通过PROFIBUS-DP总线通讯,机器人与焊机通过Devicenet总线通讯.焊接实验表明:该系统具有可靠性高、柔性好以及长期运转稳定性强等特点.【期刊名称】《兰州石化职业技术学院学报》【年(卷),期】2018(018)002【总页数】4页(P23-26)【关键词】弧焊机器人;315-2DPPLC;人机界面;控制系统【作者】闫海兰【作者单位】兰州石化职业技术学院电子电气工程学院,甘肃兰州 730060【正文语种】中文【中图分类】TP242.2目前,工业机器人逐渐成为现代制造业必备的自动化设备,越来越广泛的应用于摩托车、汽车、电子信息、工程机械、化工和家电等行业。
主要用途为搬运、码垛、加工、喷漆和焊接等。
其中,焊接机器人是在工业机器人的基础上发展起来的先进焊接设备,已占机器人投入使用量的45%以上[1,2] 。
按焊接方式的不同,焊接机器人大致可以分为点焊机器人、弧焊机器人和激光焊机器人。
近年来,尤其弧焊机器人以其能保证焊接作业的高效率和高稳定性等优点被普遍应用于焊接制造中。
然而,在实际的焊接生成中,如装配和加工上的误差会造成焊缝尺寸和位置的变化,焊接条件的变化会使熔透不均或焊道变形。
为了克服机器人焊接过程中各种不确定因素对焊接质量的影响,提高长期作业的可靠性、稳定性和柔性,而且还能实现焊接参数的在线检测、调整和焊缝质量的实时控制[3,4]。
利用计算机进行实时监测和控制时,普通的工业PC机在此环境下抗干扰能力较差。
而PLC电压范围宽、抗干扰能力强、适应环境温度范围广,在焊接环境下不需要采取特殊电源隔离和屏蔽措施。
基于PLC等离子喷涂自动控制系统的研制
U 刖
百
抗 器 后 由三 相不 控 桥 式 整 流 电 路 将 交 流 电 变 成 直 流 电 , 枪 的 喷
热 喷 涂 技 术 在 国 民 经 济 建 设 中 的 作 用 越 来 越 得 到 人 们 的 重 视 。其 应 用 领 域 从 航 空 、 天 扩 展 到 了 汽 车 制 造 、 铁 工 业 、 航 钢 纺 织机 械 、 油 化 工 、 舶 等 领 域 。 等 离 子 喷 涂 具 有 火 焰 流 温 石 船
eain, l bl n n o to fe t. rt o Rei it a df ec n l a i y i r e cs
[ y rs PamaS ryn ; L T u hsre ; rnmie Ke d 】 ls pa ig P C; o c en T as t r wo c t
关键词 : 等离子喷涂 ;L ; P C 触摸屏 ; 变送器
中图分类号 : P 1 T 22 文献标识码 : A D : 03 66i n10 —9 02 1. .3 OI1 . 9 .s.0 367 . 1 60 4 9 s 0 0
The e l p n o a o tc d ve o me t f ut ma i Co r l Sy t m f r Pl s S a i b e o nt o s e o a ma pr y ng as d n PLC
导电、 绝缘 等优异性 能的涂层 。随 着 P C ( L 可编程逻 辑控 制器)
的 出 现 , 离 子 喷 涂 技 术 自动 化 程 度 得 到 很 大 的 提 高 , 控 制 等 其 系统 操 作 简 便 、 度 快 、 率 高 。 速 效 本 文 以 实 际 研 发 改 造 项 目为 基 础 , 喷 涂 电 流 为 控 制 对 以 象 , 过 闭环 控 制 策 略 , 行 等 离 子 喷 涂 控 制 系统 的 研 制 。 实 通 进 验运行效果 表 明, 闭环 控 制 能 有 效 抵 抗 干 扰 , 现 离 子 弧 稳 定 实
基于PLC的自动焊条电弧焊装置及控制系统
基于PLC的自动焊条电弧焊装置及控制系统发布时间:2021-11-29T08:11:37.784Z 来源:《新型城镇化》2021年22期作者:尹立勇[导读] 微型步进电机、激光测距传感器、握把等组成,带动焊条进而带动电弧进行来回摆动。
科尔(天津)能源科技有限公司 300000摘要:目前,由于操作方便,焊接成本低等特点,焊条电弧焊作为一种传统的焊接方法和工艺仍然在众多工业生产场合和小微企业大量应用。
但传统手工焊条电弧焊存在送条速度和焊枪行走速度不稳,且经常需要利用摆动电弧手法控制熔池形状和焊缝成形等问题,焊接质量对于操作者依赖性非常高。
本装置设计了一种全自动的焊条电弧焊焊接装置及其控制系统,实现了焊条电弧焊过程自动焊枪行走,自动送条以及自动精确电弧摆动功能,为特定场合实现全自动焊条电弧焊过程,提升焊条电弧焊质量提供可能。
关键词:PLC;自动焊条电弧焊装置;控制系统1.自动焊条电弧焊装置构成焊接装置系统主要由焊接电源、焊接小车、摆动焊枪、焊条送条机构以及控制系统等组成。
系统工作的工作过程是利用焊接小车带动焊条行走实现自动化焊接过程,利用焊条送条机构带动往下行走,实现稳定送条过程,且送条过程中采用PID算法实现弧长跟踪。
摆动焊枪则有焊钳、电缆套壳、微型步进电机、激光测距传感器、握把等组成,带动焊条进而带动电弧进行来回摆动。
2.电弧摆动原理摆动过程中,步进电机带动焊钳做圆弧摆动实现电弧来回摆动过程。
激光测距传感器则用来实时采集焊条长度值L,并送给PLC,由PLC根据计算步进电机摆动角度α并转化为步进电机转动需要的脉冲数量和脉冲速率,以保证电弧摆动幅度和频率不变。
3.电气控制系统设计3.1系统硬件设计系统硬件连接如图1所示,FX3UPLC通过整个控制系统的核心,外部连接送条步进电机驱动器、摆动电弧步进电机驱动器以及通过扩展模块FX3U4AD连接激光测距传感器、LEM电流传感器以及电压数据采集器。
人机界面通过串口连接PLC。
基于PLC等离子喷涂自动控制系统的研制
基于PLC等离子喷涂自动控制系统的研制金鑫;宋杨洁;刘教瑜【摘要】针对传统等离子喷涂设备可靠性差,控制精度低,开环控制等缺点;设计开发了以 DVP-20EX 型号 PLC 为核心控制器以及台达 DOP-B10S615 触摸屏为人机界面的等离子喷涂自动控制系统,系统通过变送器对主电路的电流进行实时检测,并采用模糊 PID 控制算法实现闭环控制.经现场调试使用,该系统控制方便,可靠性好,能达到较好控制效果.【期刊名称】《软件》【年(卷),期】2011(032)006【总页数】3页(P111-113)【关键词】等离子喷涂;PLC;触摸屏;变送器【作者】金鑫;宋杨洁;刘教瑜【作者单位】武汉理工大学材料复合新技术国家重点实验室,武汉,430070;武汉理工大学材料复合新技术国家重点实验室,武汉,430070;武汉理工大学材料复合新技术国家重点实验室,武汉,430070【正文语种】中文【中图分类】TP212热喷涂技术在国民经济建设中的作用越来越得到人们的重视。
其应用领域从航空、航天扩展到了汽车制造、钢铁工业、纺织机械、石油化工、船舶等领域。
等离子喷涂具有火焰流温度高,喷涂范围广泛等特点。
既可以用于器件制造,也能用于旧损器件修复等。
可制备各种具有耐磨、耐腐蚀、耐热、耐氧化、导电、绝缘等优异性能的涂层。
随着PLC(可编程逻辑控制器)的出现,等离子喷涂技术自动化程度得到很大的提高,其控制系统操作简便、速度快、效率高。
本文以实际研发改造项目为基础,以喷涂电流为控制对象,通过闭环控制策略,进行等离子喷涂控制系统的研制。
实验运行效果表明,闭环控制能有效抵抗干扰,实现离子弧稳定喷涂。
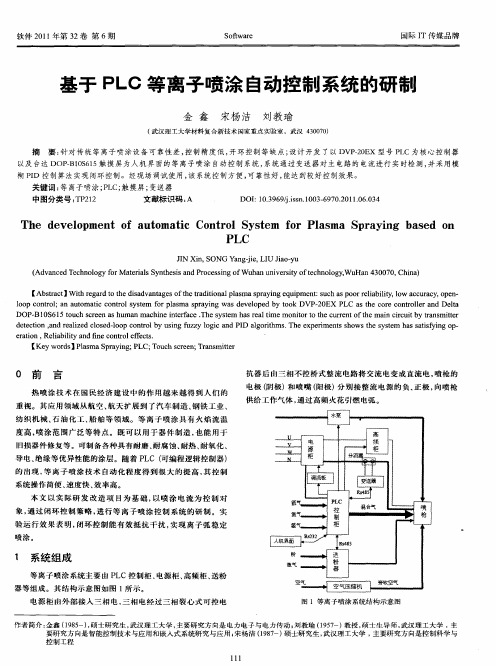
等离子喷涂系统主要由PLC控制柜、电源柜、高频柜、送粉器等组成。
其结构示意图如图1所示。
电源柜由外部接入三相电,三相电经过三相裂心式可控电抗器后由三相不控桥式整流电路将交流电变成直流电,喷枪的电极(阴极)和喷嘴(阳极)分别接整流电源的负、正极,向喷枪供给工作气体,通过高频火花引燃电弧。
基于PLC的点焊机控制系统毕业论文说明书
摘要点焊机作为一种重要的工业用具,在当今的工业生产中占着很重要的位置。
点焊是一种重要的焊接工艺,具有成本低、生产效率高、易于实现自动化和节省材料等特点。
如今,传统的点焊机自动化程度低,生产效率不高,焊点质量差,这已经不能满足工业发展的需求。
因此,需要开发一种自动化程度高的点焊机控制系统。
本文的点焊机控制系统系采用PLC加触摸屏的控制方式,能很大程度的提高企业的生产效率,减少废品率。
本文所涉与的点焊机系采用双面双点过流焊接的原理,工作时工件被压在两个电极之间,在压力的作用下两电极之间产生电阻。
当有电流通过时,就会产生高温电弧,高温融化被焊接的工件,并且电流瞬间从另一电极沿工件流至此电极,并形成回路,不对被焊工件的部结构产生伤害。
和传统半自动化点焊机相比较,该设备焊出的焊点与焊缝长度分布更均匀、效率更高,节省人力。
本次设计的点焊机由可转动的圆形工作台、带动电机左右移动的横梁以与控制电机上下运动的主轴构成。
主要加工某公司旋转座椅的零部件,一共有三个工位需要加工,这三个工位的运动控制都是由伺服系统完成精确的定位控制。
3套伺服系统分别控制X、Y、Z轴完成精确定位,PLC则对伺服电机驱动器进行控制,伺服驱动器则负责驱动伺服电机。
关键词:信捷PLC;伺服电机;触摸屏AbstractSpot welding as an important industrial appliances, occupied a very important position in today's industrial production. Spot-welding process is an important, low cost, high efficiency, easy to automate and saving materials and so on. Today, the traditional spot welding low degree of automation, production efficiency is not high, poor weld quality, which can not meet the needs of industrial development. Therefore, the need to develop a high degree of automation control system of spot welding. Spot welding control system system control PLC paper, plus a touch screen, to a large extent improve production efficiency, reduce scrap rates. Spot welding system referred to herein using double-sided double-point overcurrent welding principle, the work piece is pressed between two electrodes under pressure produces resistance between the two electrodes. When a current is passed, it will have a high temperature arc, high melting temperature of the workpiece to be welded, and the current moment from the other electrode along the workpiece flow to this electrode, and form a loop, does not harm the internal structure is the welder member. And the traditional semi-automatic welding machine compared to the device solder joints and weld length out more evenly distributed, high efficiency and save manpower.The design of the spot welding by a rotatable circular table, motor driven beam move around and up and down movement of the spindle motor control composition. The main processing components rotating seat of a company, a total of three stations need to be processed, these three stations precise motion control is done by the servo positioning control system. 3 sets of servo control the X, Y, Z axis for accurate positioning, PLC is to control the servo motor drives, servo drives are responsible for driving the servo motor.Keywords: XinJie PLC; servo motor; touch screenI / 45目录摘要AbstractI第1章绪论01.1课题意义01.2 课题的国外现状与趋势01.2.1国电焊机科技水平与发展趋势01.2.2国外电焊机科技水平的现状和发展01.3.课题容1第2章点焊机工艺的介绍12.1 点焊机控制系统12.1.1 系统原理12.1.2 系统控制框图22.2 点焊机控制系统的结构介绍22.3 点焊的基本原理32.4 点焊机控制系统的工艺流程32.5本章小结4第3章控制方案比较43.1 方案比较43.1.1确定控制方案43.1.2确定控制方向53.2 本章小结5第4章硬件设计64.1 控制要求64.2 控制方案64.3 硬件控制系统64.4 硬件选型74.4.1 PLC选型74.4.2 伺服电机的选型84.4.3 伺服驱动器的选型104.4.4 触摸屏的选型114.4.5 熔断器的选型124.4.6 按钮开关的选型124.4.7 行程开关的选型134.4.8 焊枪的选择144.4.9 交流接触器的选型144.5 PLC的I/O地址表154.5.1.输入点154.5.2.输出点154.6 PLC外部接线图164.7本章小结16第5章伺服系统设计165.1 系统设计思想165.2 伺服方案设计175.3 半闭环控制系统175.4 伺服驱动器与伺服电机的连接185.4.1 伺服单元CNO接口185.4.2伺服单元CN1接口195.4.3伺服单元CN2接口195.5 位置控制设定205.5.1 操作模式选择205.5.2 电子齿轮比的设定205.6寻找参考原点215.7本章小结22第6章软件设计226.1 软件设计思想226.2 软件流程图236.3 各主要程序236.3.1 初始化程序236.3.2 高速计数指令的应用246.3.3 DPLSY脉冲输出指令256.3.4 精确定位程序266.4 本章小结26第7章触摸屏系统267.1 触摸屏画面的制作267.1.1 新建工程277.1.2 开机动画制作277.1.3 主菜单画面制作287.1.4 自动控制画面制作287.1.5 实时监控画面制作297.2 触摸屏调试307.3 变量定义317.4 本章小结31第8章程序调试31总结32参考文献33致33附录A 伺服驱动器硬件接线34附录B PLC外部接线图36附录C 主程序37I / 45第1章绪论1.1课题意义点焊机作为一种重要的工业用具,在当今工业生产中占着举足轻重的位置。
论文基于plc控制的自动焊接机设计大学论文
基于PLC控制的自动焊接机设计系部:学生姓名:专业班级:学号:指导教师:年月日声明此论文所呈交的,是我在指导教师的指导和查阅相关著作下独立进行分析研究所取得的成果。
除文中已经注明引用的内容外,此论文不包含其他个人已经发表或撰写过的研究成果。
对此文的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:【摘要】随着现代科技的高速发展,手机的更新换代周期加快,同时手机的附属且是不可缺少的硬件--电池的需求量不断增加。
而电池在生产过程中正负极片的焊接是至关重要的一个环节,所以很有必要设计电池正负极片的自动焊接机。
本文基于此设计开发了基于PLC控制的自动焊接机设计,适用于企业的自动化设备,主要是对电池正负极片进行焊接。
在设计过程中采用欧姆龙PLC作为主控制器,加入CCD元素在激光焊接机对电池的正负极片焊接完成后,通过PLC的控制自动将电池送到下一个工位,从而CCD对其进行拍照检测焊接的结果是否合格。
在本设计中充分考虑到企业利益最大化的因素,此毕业设计产品不仅为其节约了人力成本,而且大大的提高了生产效益,保障品质的稳定,提升企业绩效,提高企业的竞争优势。
【关键词】:自动焊接机;电池正负极片;欧姆龙PLC【abstract 】With the rapid development of modern science and technology, mobile phone upgrade cycle is accelerated, at the same time is indispensable in the mobile phone accessory and hardware - battery demand is increasing. And the battery is the cathode piece of welding in the production process is one of the most important step, so it is necessary to design a battery is the cathode of the automatic welding machine. In this paper, based on the design and development the design of automatic welding machine based on PLC control, is suitable for the automation equipment of the enterprise, mainly on the battery is negative for welding. In the design process adopts omron PLC as the main controller, CCD elements in laser welding machine across the electrodes of the battery, after the completion of welding by PLC control of automatic to send the battery to the next station, thus the CCD photograph the check whether the results of the welding qualified. In this design, fully consider the factors of enterprise benefit maximization, this graduation design products not only save themanpower cost, and greatly improves the production efficiency, guarantee the stability of quality, improve enterprise performance, improve the competitive advantage of enterprises.【key words 】: automatic welding machine; The battery is negative; Omron PLC目录引言 (1)一、自动焊接机的动作流程 (2)(一)自动焊接机主要工位 (2)(二)自动焊接机动作的流程 (2)二、自动焊接机的机械设计简述 (5)(一)自动焊接机中气缸的选用 (5)(二)电磁阀 (6)(三)真空发生器 (7)(四)电机 (7)三、自动焊接机的电气元器件介绍分析 (7)(一)控制柜介绍 (7)(二)重要控制元器件介绍 (9)总结 (14)参考文献 (15)致谢 (16)附录PLC梯形图 (17)引言工业的自动化一直以来都是我国的发展的方向和目标。