永磁同步电机弱磁控制
永磁同步电机弱磁控制的控制策略研究

永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用。
本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统。
矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能。
1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
永磁同步电机弱磁控制原理

永磁同步电机弱磁控制原理永磁同步电机是一种高效、高性能的电机,具有高转矩密度、高效率、高精度等优点,因此在工业生产中得到了广泛应用。
然而,永磁同步电机在运行过程中,由于磁场的不稳定性,容易出现磁场失稳、转速波动等问题,影响了电机的性能和稳定性。
为了解决这些问题,人们提出了弱磁控制原理,通过控制电机的磁场,使其保持稳定,从而提高电机的性能和稳定性。
弱磁控制原理是指在永磁同步电机运行过程中,通过控制电机的磁场,使其保持在一定的范围内,从而保证电机的性能和稳定性。
具体来说,弱磁控制原理包括两个方面:一是控制电机的磁场强度,二是控制电机的转速。
控制电机的磁场强度是弱磁控制原理的核心。
在永磁同步电机中,磁场的强度直接影响电机的性能和稳定性。
如果磁场过强或过弱,都会导致电机的性能下降或者失稳。
因此,弱磁控制原理要求控制电机的磁场强度在一定的范围内,既不能过强,也不能过弱。
具体来说,可以通过控制电机的电流来控制磁场的强度。
当电机的电流过大时,磁场会过强,导致电机失稳;当电流过小时,磁场会过弱,导致电机性能下降。
因此,弱磁控制原理要求控制电机的电流在一定的范围内,从而控制磁场的强度。
控制电机的转速也是弱磁控制原理的重要方面。
在永磁同步电机中,转速的稳定性直接影响电机的性能和稳定性。
如果转速波动过大,会导致电机的性能下降或者失稳。
因此,弱磁控制原理要求控制电机的转速在一定的范围内,既不能过快,也不能过慢。
具体来说,可以通过控制电机的电流和电压来控制转速的稳定性。
当电机的电流和电压过大时,转速会过快,导致电机失稳;当电流和电压过小时,转速会过慢,导致电机性能下降。
因此,弱磁控制原理要求控制电机的电流和电压在一定的范围内,从而控制转速的稳定性。
弱磁控制原理是一种有效的控制永磁同步电机的方法,可以提高电机的性能和稳定性。
在实际应用中,可以通过控制电机的电流和电压来控制磁场的强度和转速的稳定性,从而实现弱磁控制。
同时,还可以采用先进的控制算法和控制器,提高电机的控制精度和稳定性,进一步提高电机的性能和稳定性。
永磁同步电机弱磁控制策略仿真研究
永磁同步电机的弱磁控制策略的仿真研究收藏此信息添加:顾光旭来源:1 引言目前,弱磁控制是永磁同步电机研究的又一个热点。
由于材料技术的进展,高剩磁密度br 和高矫顽力hc的永磁材料应用于电机,电机在相当大的程度上已不怕电枢反映的去磁作用,允许在直轴上流过较大的去磁电流。
另一方面为了使电机运行于高速区,拓宽电机系统的调速范围。
在电压型逆变器驱动的电机系统中,电机端电压不可能提高的情形下,减弱电机磁场使电机转速升高的方式—弱磁控制,能够使电机运行在额定转速以上。
在很多牵引和纺织驱动应用处合中,需要恒功率控制和宽调速范围运行,因此,电机的弱磁控制日趋倍受关注。
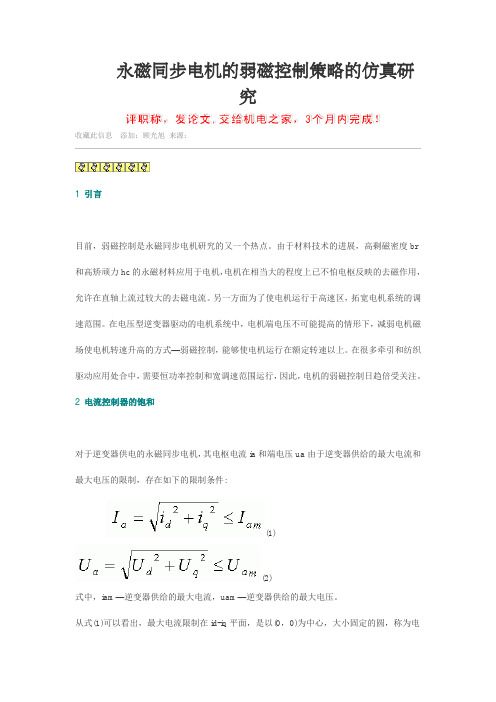
2 电流控制器的饱和对于逆变器供电的永磁同步电机,其电枢电流ia和端电压ua由于逆变器供给的最大电流和最大电压的限制,存在如下的限制条件:(1)(2)式中,iam—逆变器供给的最大电流,uam—逆变器供给的最大电压。
从式(1)可以看出,最大电流限制在id-iq平面,是以(0,0)为中心,大小固定的圆,称为电流极限圆。
最大的电压限制可以用以下方程表示:(3)在id-iq平面上,随着电机转速的提高,最大电压极限是一簇不断缩小,以(-1,0)为中心的椭圆,称为电压极限椭圆。
电流矢量ia必须位于电流极限圆和电压极限椭圆中,否则电枢电流不能跟随给定电流,永磁同步电机的调速性能将下降。
在电机低速运行段,电压极限椭圆较大,电流控制器输出电流能力主要受到电流极限圆的约束,限制了永磁同步电机低速时的输出力矩。
在高速运行段,电压极限椭圆不断缩小,电压极限椭圆成为逆变器输出约束的主要方面,从而限制了永磁同步电机的调速运行范围。
采用弱磁控制可以扩展永磁同步电机的调速范围,在高速段避免电流控制器饱和,即提高高速运行时永磁同步电机矢量控制系统的调速性能。
在永磁同步电机矢量控制系统中,正常转速运行范围内能够采用不同的电流控制策略,采用这些电流控制方法时,随着电机转速的升高,电流控制器很快就会进入饱和。
永磁同步电机弱磁控制0扭矩的原因-概述说明以及解释

永磁同步电机弱磁控制0扭矩的原因-概述说明以及解释1.引言1.1 概述永磁同步电机作为一种高效、节能的电机类型,广泛应用于电动汽车、工业生产等领域。
弱磁控制作为一种控制策略,在提高电机效率和降低能耗方面具有重要作用。
然而,在弱磁控制下,永磁同步电机可能出现零扭矩的情况,这将影响电机的性能和工作稳定性。
因此,本文将探讨弱磁控制下永磁同步电机出现零扭矩的原因,并提出解决方案,为优化永磁同步电机的控制效果提供参考。
写文章1.1 概述部分的内容1.2 文章结构文章结构部分是关于整篇文章内容的组织和安排的说明。
在这篇文章中,主要分为引言、正文和结论三个部分。
具体来说,引言部分包括概述、文章结构和目的三个小节,通过引言部分引领读者对文章主题有一个整体的认识和准备。
正文部分主要包括永磁同步电机的基本原理、弱磁控制的概念和应用、以及弱磁控制下出现零扭矩的可能原因三个小节,通过详细介绍这些内容来帮助读者深入了解永磁同步电机弱磁控制0扭矩的原因。
结论部分则包括总结弱磁控制对永磁同步电机的影响、对零扭矩问题的解决建议,以及展望未来永磁同步电机的发展方向三个小节,通过对文章内容进行总结和展望,让读者对这一主题有一个更加深入和全面的理解。
整个文章结构清晰明了,让读者能够系统性地了解和学习关于永磁同步电机弱磁控制0扭矩的问题。
1.3 目的本文旨在探讨永磁同步电机弱磁控制下出现零扭矩的原因。
通过对永磁同步电机的基本原理和弱磁控制的概念进行分析,深入探讨在弱磁控制模式下零扭矩问题可能出现的原因,为进一步研究和解决这一问题提供理论支持。
同时,本文还致力于总结弱磁控制对永磁同步电机性能的影响,并提出解决零扭矩问题的建议,为永磁同步电机的应用和发展提供参考和指导。
最终,本文旨在展望未来永磁同步电机的发展方向,推动其在各种应用领域中的广泛应用和进步。
2.正文2.1 永磁同步电机的基本原理永磁同步电机是一种通过永磁体产生磁场,并利用定子绕组和转子磁场之间的相互作用产生转矩的电机。
永磁同步电机弱磁最优控制策略研究

永磁同步电机弱磁最优控制策略研究GONG Jinbiao;SHI Huoquan【摘要】针对永磁同步电机(PMSM)在恒转矩区起动能力差、在恒功率区电流轨迹不易跟踪等问题,提出基于电压反馈复合电流前馈的定子电流弱磁最优控制策略.通过判断电流前馈环节达到稳定时所需的电流与采用最大转矩电流比(MTPA)算法所得电流大小,使定子电流在恒转矩区通过电流前馈作用快速跟踪MTPA曲线,加快起动;在恒功率区采用电压反馈复合电流前馈的策略,增强系统抗干扰能力的同时最大化直流母线电压利用率.为了验证该策略的可行性,搭建PMSM仿真模型,构建以dSPACE1007为核心的试验平台,对其进行仿真和试验,结果表明了该策略的稳定性和有效性.【期刊名称】《电机与控制应用》【年(卷),期】2019(046)004【总页数】6页(P32-37)【关键词】永磁同步电机;弱磁控制;最大转矩电流比;电压反馈复合电流前馈【作者】GONG Jinbiao;SHI Huoquan【作者单位】【正文语种】中文【中图分类】TM3410 引言内置式永磁同步电机(IPMSM)因其良好的功率密度和工作效率被广泛应用于各种工业场合[1]。
优化的控制策略通过适当控制电流矢量可以实现电机高利用率。
在基速范围内,最大转矩电流比(MTPA)控制策略可以实现铜耗最小化。
在需要宽速度范围运行的应用,比如电动汽车,在弱磁控制策略中利用永磁体励磁,使电机高速稳定地运行在恒功率区[2]。
对IPMSM进行弱磁区控制策略的研究有重要意义。
在传统IPMSM中,不能直接控制磁通量,只能通过去磁效应减弱气隙磁通量d轴电枢反应电流[3]。
通常采用电流前馈、电压反馈或混合弱磁方法扩展永磁同步电机(PMSM)的运行区域。
电压反馈弱磁控制是通过适当的闭环直接控制逆变器输出电压[4]。
文献[5]通过电压反馈研究不同PMSM控制系统在弱磁控制区域的变化,阐释了弱磁控制特性的参数变化以及转矩限制对弱磁控制的影响。
弱磁控制原理与控制方法个人总结

P D F 文件
用 使
" p d f F a c t 试 o r 用 y 本创 P r 建 版 "
电动机的定子端相电压就会升高,电流 PI 调节器的输出就会逐步接近饱和值,使调节裕量 减少,影响调节能力。
图 1-6 隐极电机定子电流矢量轨迹( −ψ f / Ld < ilim )
P D F 文件
用 使
" p d f F a c t 试 o r 用 y 本创 P r 建 版 "
(1-8)
弱磁控制式为满足式(1-7),如图 1-3 所示,通过控制 id 可使逆变器输出功率不变,将电 动机运行范围扩大到高速区域。但在上述两种控制方案中,当电动机转速达到较高转速时, 电机反电势增大, 都将会导致定子端电压大于母线电压, 迫使定子电流跟踪其指令值所需的 电压差减小至 0(甚至为负) ,此时逆变器的 dq 轴电流控制器都会开始饱和,此时 dq 轴电 流控制器输出均是其限幅值从而失去控制,没有达到弱磁控制的目的。因此在实际应用中, PMSM 的弱磁控制主要是在满足电压极限椭圆和电流极限圆的基础上,调整 id 、 iq ,控制 电流矢量轨迹,避免电流调节器饱和,从而使 PMSM 由恒转矩调速平稳、快速地过渡到弱 磁工作模式。
P D F 文件
用 使
" p d f F a c t 试 o r 用 y 本创 P r 建 版 "
区间 3 为到达 A2(即输出达到最大输出功率) 后如果仍需要扩速, 则需按 A2 → A3 的 轨迹变化。但若圆心坐标( − ψ f / Ld ,0)落在电流极限圆外即 −ψ f / Ld > ilim ,则不存在 此区间。 当电动机运行于某一转速 ω e 时,由电压平衡方程:
永磁同步电机的弱磁控制

永磁同步电机的弱磁控制
永磁同步电机被广泛应用于许多工业领域,如汽车工业、航天航空、机器人、风力发
电和家用电器等。
在永磁同步电机的控制方案中,弱磁控制是一种有效的控制方法,可以
提高永磁同步电机的效率、降低成本和减少能源消耗。
弱磁控制的主要原理是在永磁同步电机的运行过程中,通过降低磁通密度和磁场强度
来减少机械损耗和电流损耗,从而实现能耗的优化。
弱磁控制的另一个优点是可以减少永
磁模拟器的成本,因为永磁模拟器可以用绕组替代,从而减少用于控制电流的硬件成本。
弱磁控制的主要步骤包括:
1. 建立永磁同步电机的数学模型。
对于永磁同步电机的数学模型,可以采用矢量控
制法、电气模型和磁路模型等多种方法进行建模。
2. 选择合适的控制策略。
弱磁控制中,可以采用间接矢量控制和直接转矩控制两种
策略。
其中,采用直接转矩控制可以在永磁同步电机低速运行时减少电流损耗。
3. 设计控制算法。
控制算法是实现弱磁控制的关键,需要综合考虑控制精度、实时性、稳定性等因素进行设计。
4. 实现控制。
弱磁控制需要通过电子控制器来实现,在控制器中可以使用DSP、FPGA、ARM等芯片进行实现。
弱磁控制的实际应用需要考虑到永磁同步电机的不同工作状态。
在低速运行状态下,
弱磁控制可以减少永磁同步电机的电流损耗和机械损耗;在高速运行状态下,弱磁控制可
以减少永磁同步电机的谐波噪声和振动。
永磁同步电机弱磁控制理论研究
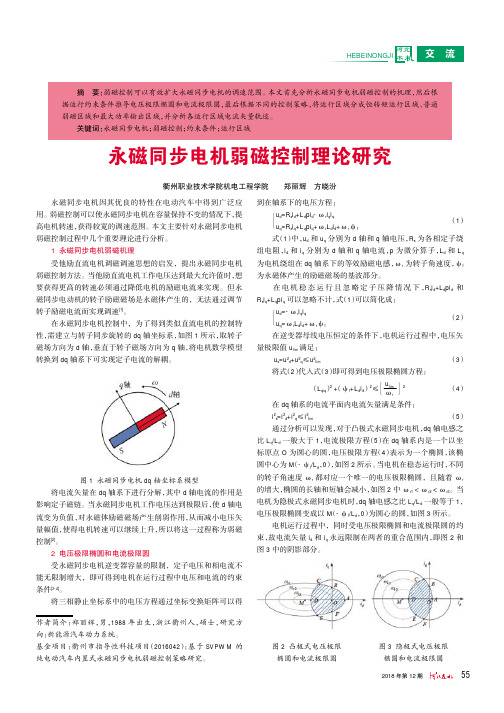
图 6 普通弱磁区域电流矢量轨迹(圆心在内) 3.3 最大功率输出区域 如图 7 所示,永磁同步电机的电压极限椭圆中心 M 在电流 极限圆的内部时,最大功率输出轨迹与电流极限圆必有交点 B, 随着转速的升高,电流矢量从 A 点变化到 B 点后将沿着最大功 率输出轨迹变化,直至椭圆中心 M 点。M 点为电机在该区域的极 限运行点,此时在理想状态下永磁体的磁链被完全抵消,电机的 转速能够达到无限大。
图 1 永磁同步电机 dq 轴坐标系模型 将电流矢量在 dq 轴系下进行分解,其中 d 轴电流的作用是 影响定子磁链。当永磁同步电机工作电压达到极限后,使 d 轴电 流变为负值,对永磁体励磁磁场产生削弱作用,从而减小电压矢 量幅值,使得电机转速可以继续上升,所以将这一过程称为弱磁 控制[2]。 2 电压极限椭圆和电流极限圆 受永磁同步电机逆变器容量的限制,定子电压和相电流不 能无限制增大,即可得到电机在运行过程中电压和电流的约束 条件[3-4]。 将三相静止坐标系中的电压方程通过坐标变换矩阵可以得
(3)
Hale Waihona Puke 蓘 蓡 (Lqiq)2 +(ψf+Ldid)2≤
ulim ωr
2
在 dq 轴系的电流平面内电流矢量满足条件:
(4)
i2s=i2d+i2q≤i2lim
(5)
通过分析可以发现,对于凸极式永磁同步电机,dq 轴电感之
比 Lq/Ld 一般大于 1,电流极限方程(5)在 dq 轴系内是一个以坐
标原点 O 为圆心的圆,电压极限方程(4)表示为一个椭圆,该椭
关键词:永磁同步电机;弱磁控制;约束条件;运行区域
永磁同步电机弱磁控制理论研究
衢州职业技术学院机电工程学院 郑丽辉 方晓汾
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
controllable maximum speed is reduced. On the other hands, if the SOC of battery is at Vdc2, the controllable maximum speed is extended. If ignoring the DC-link voltage factor, the motor should be controlled in case of possible minimum voltage of battery. If not, excessive back-EMF voltage can break the inverter by the generation of the large regenerating current.
(a) torque and speed curve in voltage variation.
iq[ A]
Current limit circle
Vdc 2 Vdc1
M
MTPAபைடு நூலகம்courve
id [ A]
Voltage limit ellipse
(b) voltage limit ellipse and current limit circle in voltage variation. Fig. 2 Start point according to the variable DC-link voltage.
1 School of Information and Communication Engineering, Sungkyunkwan University, Korea E-mail: jaylee8201@
Abstract — This paper proposes the field weakening method of IPMSM(Interior Permanent Magnet Synchronous Machine) for the electric vehicle (EV) application. The method of using lookup-table generally used in automotive application has merits for fast dynamics, however containable data is limited especially on DC-link voltage. On the other hands, the method using a voltage feedback control has advantages in current control at variable speed and DC-link voltage automatically. However, dynamics is determined by the gain of controller. In this paper, field weakening control of fast dynamics and variable DC-link voltage is achieved by suitable combination of lookup-table and voltage feedback controller. Proposed method is verified by the simulation and experiment result.
A. Voltage Feed-back Method [4]
Fig. 3 shows the voltage feed-back method. This method append feed-back controller to lock the output EMF voltage magnitude in the voltage limit condition by measuring inverter output voltage or regarding current controller output as a voltage magnitude. Once field-weakening strategy starts PI controller increases negative ∆idrs to reduce the EMF voltage. It is able to prevent saturation of current controller and makes voltage margin.
Te*
ie*
id*s
ds
ωr
Te*
Vdc vs*
ds
ie*
iq*s
qs
ωr
ωr
Te*
vs* qs
θr iv iu
Lookup Table
Fig.1 General vector control method using on lookup table.
Using lookup-table data is for reducing the unreliable data comes from controllers which can be affected by the various circumstance of motor. Moreover, the controlled data should pass through the specific sequence and the data consequentially has unavoidable delay. Lookup-table data comes from experiment has reliable and fast dynamics to
To use this control region of variable DC-link voltage, several researches are developed.[4][5][6] Detail explanation of each method is illustrated on the next chapter, but these method still have the problem of dynamics and safety. In this paper, to improve the control performance of field weakening, the methods of combining the controller and lookup-table is proposed suitably. The point of proposed method is that the field weakening d-axis current is separated by two components. The one is for torque current and the other is for permanent magnet flux. Due to the unaltered d-axis inductance and permanent magnet flux from motor circumstance variation, this component could be compensated by the lookup-table for fast dynamics of field weakening operation. Proposed algorithm is verified by the simulation and experiment.
control the motor. However, lookup table method also has the problem that it is only corrected on experimental setup and applicable data is limited by the memories in hardware setup. Although the data error between experimental and practical circumstance is generally small and it could be fixed by some modified data or ignored. However, the problem of inapplicable all various circumstances of motor and inverter make the limit of usable output power.
II. ANALYSIS OF CONVENTIONAL METHOD
In this section, the generally used current reference method according to torque reference and driving conditions are reviewed