TM影像与GIS矢量数据的自动配准
GIS实验二地图(或影像)配准及矢量化
一、实验目的与要求1.利用影像配准(Georeferencing)工具进行影像数据的地理配准2.编辑器的使用(点要素、线要素、多边形要素的数字化)。
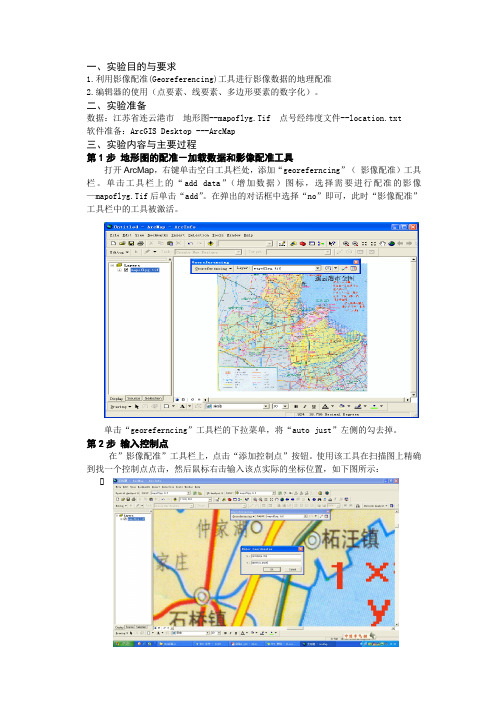
二、实验准备数据:江苏省连云港市地形图--mapoflyg.Tif 点号经纬度文件--location.txt软件准备:ArcGIS Desktop ---ArcMap三、实验内容与主要过程第1步地形图的配准-加载数据和影像配准工具打开ArcMap,右键单击空白工具栏处,添加“georeferncing”(影像配准)工具栏。
单击工具栏上的“add data”(增加数据)图标,选择需要进行配准的影像—mapoflyg.Tif后单击“add”。
在弹出的对话框中选择“no”即可,此时“影像配准”工具栏中的工具被激活。
单击“georeferncing”工具栏的下拉菜单,将“auto just”左侧的勾去掉。
第2步输入控制点在”影像配准”工具栏上,点击“添加控制点”按钮。
使用该工具在扫描图上精确到找一个控制点点击,然后鼠标右击输入该点实际的坐标位置,如下图所示:用相同的方法,在影像上增加多个控制点(大于7 个),输入它们的实际坐标。
点击“影像配准”工具栏上的“查看链接表”按钮。
增加所有控制点,并检查均方差(RMS)后,在“georeferncing”(影像配准)菜单下,点击“up date georeferncing”后再单击“fit display”。
执行菜单命令”rectify”,打开“save as ”(另存为)对话框。
设置相应的属性,完成后单击“save”(保存)按钮。
注意:在“format”一栏的下拉列表框中选择“TIFF”。
第三步编辑器的使用(点要素、线要素、多边形要素的数字化)(1)单击工具栏上的“arccrtalog”图标打开如下图所示的对话框。
在左侧的树型区域中选择文件夹后在右边的空白区域右键单击,选择“new”\“shapefile”命令。
TM影像与GIS矢量数据的自动配准

2 TM 影像外参数解算
a6 X3 + a7 X2 Y + a8 X Y2 + a9 Y3 y = b0 + b1 X + b2 Y + b3 X2 + b4 X Y + b5 Y2 +
如前所述 ,对于 CCD 扫描式成像的 TM 影像 而言 ,一条直线特征上的不同点有不同的参数 ,因 此很难用共面方程描述线状特征的成像条件 ,需要
1 基于 GIS 矢量地图信息的影像线 状信息自动提取
从遥感影像上自动提取线状地物 (道路 、水系
等) 是摄影测量与遥感领域的难题和重点 ,它对摄 影测量和遥感影像分析自动化起着至关重要的作 用[6] 。目前直接从影像上自动提取线状地物的算 法还不成熟 ,本文采取如下策略 : 分别在 TM 影
矢量数据由一系列点连成线段所组成 。将每 段线段等分为若干部分 (如图 2 所示) ,一般间隔 以 5~10 个像素为宜 。以等分点为起点 ,沿法线 方向在一定范围内搜索特征点 。图 2 中实折线是 矢量数据根据仿射变换叠加到影像上的结果 ,虚 折线为对应的影像特征 。垂直于实折线的一组虚 线是等分点的搜索范围和方向 。
第 30 卷第 11 期
矢量与遥感影像的自动配准
矢量与遥感影像的自动配准矢量数据和遥感影像在地理信息系统(GIS)和遥感领域中具有广泛的应用。
矢量数据是一种描述地理要素的数据格式,包括点、线、面等几何形状和属性信息,常用于地图制作和空间分析。
遥感影像是通过遥感技术获取的地球表面图像,可以包括可见光、红外、雷达等多种类型,用于土地资源调查、环境监测、城市规划等领域。
在应用过程中,往往需要将矢量数据与遥感影像进行配准,以便实现空间位置的精确对应,进而进行一体化分析和应用。
提高精度:通过对矢量数据和遥感影像进行精确配准,可以将不同数据源的数据进行精确对接,减少地图制作和空间分析中的误差,提高数据精度。
降低成本:手动配准数据不仅需要大量时间,而且容易出错。
自动配准技术可以通过程序实现快速、准确的数据对接,大大降低配准成本。
促进数据融合:通过将矢量数据和遥感影像进行配准,可以促进多种数据源的融合,扩展数据的应用领域,提高数据的利用率。
矢量与遥感影像的自动配准主要涉及以下技术和方法:特征提取:通过对矢量数据和遥感影像进行特征提取,获取具有代表性的特征点、线、面等元素,为后续匹配提供依据。
匹配算法:常见的匹配算法包括基于概率统计的匹配算法、基于距离的匹配算法、基于梯度的匹配算法等。
这些算法可以根据矢量数据和遥感影像的特征,选择合适的算法进行自动配准。
变换模型:常用的变换模型包括仿射变换、透视变换、多项式变换等。
这些模型可以将矢量数据和遥感影像进行几何变换,以实现精确配准。
优化算法:为了找到最优的变换参数,需要使用优化算法进行求解。
常见的优化算法包括梯度下降法、牛顿法、遗传算法等。
矢量与遥感影像的自动配准技术在诸多领域都有广泛的应用。
以下是一些典型案例:土地资源调查:将矢量地图与遥感影像进行配准,可以准确获取土地资源的分布、面积、利用状况等信息,为政府决策提供科学依据。
环境监测:通过对矢量数据和遥感影像进行配准,可以实时监测环境污染状况,为环境保护提供数据支持。
矢量数据配准具体步骤ARCGIS软件
矢量数据配准具体步骤(ARCGIS 软件)ArcGIS下矢量数据配准ArcGIS 空间校正(spatial adjustment)是个常用的工具,下面简单说一下它的使用方法。
下图中,青色的是已经有坐标系的要素(基准要素),黄色的是需要校正的要素(被校正要素)。
1、将已经具有坐标系的要素类和需要校正的要素类加进arcmap中(注意:先加入有坐标系的图层),调出spatial adjustment工具条,使需要校正的图层处于编辑状态。
2、在spatial adjustment工具条菜单里设置要校正的数据,把要校正的要素类打钩,3、设置校正方法每种校正方法的适用范围和区别可看帮助文件。
仿射变换是最常用的方法,建议使用。
4、设置结合环境,以便准确地建立校正连接Editor->snapping:5、点置换连接工具6、点击被校正要素上的某点,然后点基准要素上的对应点,这样就建立了一个置换链接,起点是被校正要素上的某点,终点是基准要素上的对应点。
用同样的方法建立足够的链接。
理论上有三个置换链接就能做仿射变换,但实际上一般是是不够用的。
实际使用中要尽量多建几个链接,尤其是在拐点等特殊点上,而且要均匀分布。
7、点spatial adjustment工具条菜单下的adjust,即可应用配准,然后保存编辑。
当熟悉整个过程后,可以试试其他几种变换(相似、投影、橡皮拉伸等)。
上面的方法是将一个没有坐标系的要素类校正到一个有坐标系的要素类,简单说是图对图校正。
如果只有一个没有坐标系的要素类,但知道它上面关键点的真实坐标,上面的4、5、6步用下面方法代替:4、读出原图上关键点的屏幕坐标,找到和它对应的真实坐标5、建立连接链接文件,格式为文本文件,第一列是关键点的屏幕x坐标,第二列是关键点的屏幕y坐标,第三列是关键点真实的x坐标,第四列是关键点真实的y坐标,中间用空格分开,每个关键点一行。
如下图所示6、在spatial adjustment菜单中打开链接文件,选刚才建立好的链接文件其它步骤与前面的相同。
配准及矢量化实验报告
配准及矢量化实验报告配准及矢量化实验报告一、引言配准和矢量化是遥感图像处理中的重要步骤,它们在地理信息系统(GIS)和遥感应用中扮演着关键的角色。
本实验旨在探索配准和矢量化的方法,并通过实际操作验证其有效性。
二、配准方法1. 影像预处理在进行配准之前,我们首先对原始遥感影像进行预处理。
预处理包括去除噪声、增强对比度和调整图像亮度等步骤,以提高影像的质量和可视化效果。
2. 特征提取特征提取是配准的关键步骤。
我们可以通过不同的算法提取图像中的特征点或特征线,常用的方法包括SIFT、SURF和ORB等。
在本实验中,我们选择了SIFT算法进行特征提取。
3. 特征匹配特征匹配是将待配准图像与参考图像中的特征进行匹配的过程。
匹配的目标是找到两幅图像中相对应的特征点或特征线。
常用的匹配算法有最近邻匹配和RANSAC等。
我们在实验中使用了最近邻匹配算法。
4. 几何变换在完成特征匹配后,我们需要根据匹配结果进行几何变换,将待配准图像与参考图像对齐。
常用的几何变换包括平移、旋转、缩放和仿射变换等。
在本实验中,我们使用了仿射变换进行配准。
三、矢量化方法1. 影像分割在进行矢量化之前,我们需要将配准后的影像进行分割,将影像划分为不同的区域。
常用的分割算法包括基于阈值的分割、基于边缘的分割和基于区域的分割等。
我们在实验中使用了基于阈值的分割算法。
2. 矢量化矢量化是将分割后的影像转化为矢量数据的过程。
在本实验中,我们将使用自动矢量化方法将影像中的区域转化为矢量多边形。
常用的自动矢量化方法包括边缘追踪、区域生长和形态学操作等。
3. 矢量数据处理在完成矢量化后,我们可以对生成的矢量数据进行进一步的处理和分析。
例如,可以计算矢量多边形的面积、周长和形状指标,或者进行空间查询和拓扑分析等。
四、实验结果与讨论我们选择了一组高分辨率航拍影像进行配准和矢量化实验。
经过预处理、特征提取、特征匹配和几何变换等步骤,我们成功地将待配准影像与参考影像对齐,并生成了配准后的影像。
ArcGis对影像进行配准
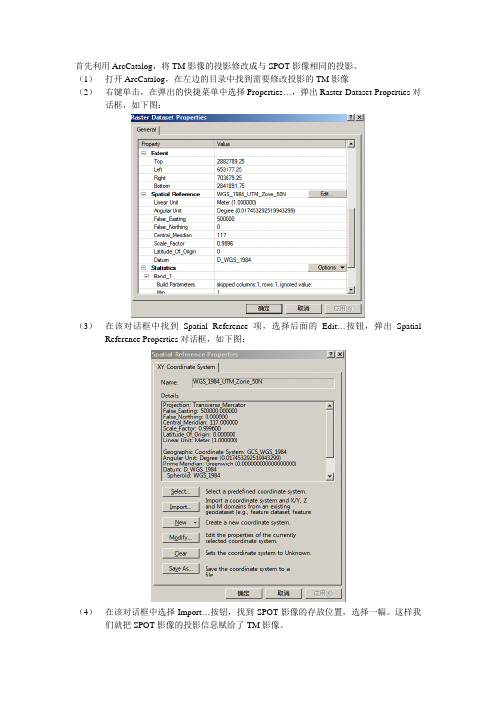
首先利用ArcCatalog,将TM影像的投影修改成与SPOT影像相同的投影。
(1)打开ArcCatalog,在左边的目录中找到需要修改投影的TM影像(2)右键单击,在弹出的快捷菜单中选择Properties…,弹出Raster Dataset Properties对话框,如下图:(3)在该对话框中找到Spatial Reference项,选择后面的Edit…按钮,弹出Spatial Reference Properties对话框,如下图:(4)在该对话框中选择Import…按钮,找到SPOT影像的存放位置,选择一幅。
这样我们就把SPOT影像的投影信息赋给了TM影像。
(5)单击“应用”,“确定”按钮,完成操作。
在ArcGis中配准遥感影像。
(1)打开Arcmap,加载修改过投影的TM影像和SPOT影像。
(2)打开Georeferencing 工具条,如下图:(3)其中Layer:选项应选择TM影像,即需要配准的影像,(4)为了便于配准,我们将SPOT影像放在TM影像的下面,并将TM影像的透明度进行修改,右键单击TM影像名,在弹出的快捷菜单中选择Properties…,弹出Layer Properties对话框,如下图:(5)在弹出的对话框中,选择Display标签,并将其中的Transparency:该项的值改为50 (6)为了更好的分辨出基准图和需要配准的图,我们还可以讲TM影像的颜色进行修改,方法就是单击TM影像名称下的颜色条进行修改。
(7)接着,就可以利用Georeferencing 工具条上的“Add Control Points”工具,进行控制点的选取。
通常影像的四个角应选择合适的控制点,对于其它的点的选择应遵循均匀分布,特征明显的地方。
(8)选择了20个点左右,点击Georeferencing 工具条上的“View Link Table”工具,弹出Link Table对话框,如下图:(9)在Transformation:选项中选择合适的变换方法,并同时查看所选控制点的误差和Total RMS error,删除那些误差较大的控制点,误差和Total RMS error是越小越好。
实验五影像配准及矢量化-实验报告.doc
实验五影像配准及矢量化-实验报告.doc一、实验目的1. 掌握卫星影像配准方法;2. 掌握ArcGIS软件的基本操作和面图层矢量化方法;3. 会运用ArcGIS软件进行矢量化操作。
二、实验步骤1. 导入两个卫星影像并打开“Georeferencing”工具;2. 对其中一个影像进行裁剪,保留感兴趣区域;3. 对两个影像进行配准;4. 使用矢量化工具将裁剪后的影像中的目标矢量化成面图层。
三、实验原理1. 影像配准原理影像配准是指将不同数据源的影像进行比对,通过像素级别的匹配确定它们的空间位置,使它们在同一地理坐标系下并且符合各自在地球上的真实位置和空间位置。
常用的影像配准方法有:基于特征点的配准和基于控制点的配准。
影像裁剪是指通过选取感兴趣的区域对影像进行裁剪处理,从而提高图像的可读性和可用性。
在ArcGIS中,裁剪工具主要有“矢量裁剪”和“栅格裁剪”两种类型。
3. 面图层矢量化原理面图层矢量化是指将栅格图像中的目标通过工具转换成矢量面图层。
在ArcGIS中,面矢量化工具主要有“栅格矢量化”和“矢量化笔”两种方法。
四、实验操作1. 导入两个卫星影像在ArcGIS中,通过左上角的“文件”-“添加数据”-“添加卫星影像”进行导入。
本实验导入的是两幅经过预处理的卫星遥感影像,名分别为“Ikonos02”和“Ikonos03”。
2. 对其中一个影像进行裁剪选择“Ikonos02”影像,右键点击属性–“定义图像边界” –“从当前显示extents 定义边界”–“裁剪保存”–“保存”即可保存当前感兴趣的区域。
在ArcGIS中,通过选择“Georeferencing”工具进行影像配准。
首先对“Ikonos02”影像进行配准:①选择“Georeferencing”工具,新建“Control Points”;②通过“从要素中添加点”插入至少4个对应点来标记影像的原始坐标;③依次选择“Transformation”、“指定输出”,选择新建控制点文件、坐标系和输出路径,并勾选“启动另一个Georeferencing”;④ 影像配准完成后,右键选择“移动和旋转”,选择调整到符合实际。
影像配准及矢量化实验报告
影像配准及矢量化实验报告1. 实验目的学习和掌握影像配准和矢量化的基础知识,了解和掌握相关的方法和技术,并能够应用这些知识和技术,完成实际的操作和应用。
2. 实验环境在本实验中,我们主要使用了ArcGIS软件,该软件是一个非常强大的地理信息系统,可以进行地图绘制、数据处理、分析和可视化等操作。
3. 实验内容(1)影像配准影像配准是指将多幅遥感图像、地图或其他相关的图像进行空间上的对应和重叠,使它们能够准确地融合在一起。
在实际应用中,影像配准可以实现多波段、多时相和多来源图像间的精确对齐和重叠,进一步提升影像的解译和分析能力。
在ArcGIS软件中,影像配准主要可以通过以下几个步骤来完成:- 打开需要进行配准的影像和参考影像;- 点击“数据管理”菜单中的“地理处理”功能,然后选择“影像拼接”工具;- 在拼接工具中,选择需要进行配准的影像和参考影像,然后设置正确的配准方式和参数;- 点击“运行”按钮,开始进行影像配准。
完成后,可以查看配准效果并进行相关的后续分析。
(2)矢量化矢量化是指将栅格数据或其他非矢量数据转化为矢量数据的过程。
在实际应用中,矢量化可以帮助我们提取和记录图像中的空间特征和属性,进一步实现精确的测绘、地图制图和空间分析。
4. 实验结果在实际操作中,我们成功地完成了影像配准和矢量化两个实验,并得出了以下的结论和结果:- 影像配准可以大幅提升遥感图像的解译和分析能力,确保多时相和多来源图像之间的准确融合和拼接;- 矢量化可以有效提取图像中的空间特征和属性,进一步实现精确的测绘和地图制图,以及空间分析和应用;- 使用ArcGIS软件可以快速、简便地完成影像配准和矢量化,进一步提升数据处理和应用效率。
5. 实验总结影像配准和矢量化是遥感图像处理和地图制图中非常重要的技术方法,可以帮助我们更好地解析和利用空间数据。
在实际操作中,需要根据不同的应用需求和数据特征,选择合适的方法和技术,进一步提升处理和分析效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通过广义点摄影测量的方法求解外参数 。迭 代平差过程中采用了丹麦法选权策略 ,正确定位 了粗差 ,使结果不致于因少部分复杂地区的线状 地物提取错误而受到影响 。将求得的影像参数代 入式 (2) 中 ,然后将矢量数据反投影到影像空间 中 ,叠加结果见图 6 。可以看出影像和矢量配准 得较好 。
图 5 多尺度模板匹配法提取道路点 Fig. 5 U sing Multi2scale Template Matching Met hod
图 3 线状信息自动提取 Fig. 3 The Ext ractio n of Line2like Info rmation
Auto matically
采用广义点摄影测量的方法来解决这个问题 。 采用二元三次多项式描述地面与 TM 影像
的映射关系 ,其数学表达式为 :
x = a0 + a1 X + a2 Y + a3 X2 + a4 X Y + a5 Y2 +
文献标志码 :A
TM 影像与 GIS 矢量数据的自动配准
张剑清1 董 明1 张宏伟1
(1 武汉大学遥感信息工程学院 ,武汉市珞喻路 129 号 ,430079)
摘 要 :介绍了一种新的基于信息融合的 TM 影像和 GIS 矢量数据自动配准方法 。首先建立 TM 影像和 GIS 矢量数据的近似变换关系 ,在此基础上以矢量地图上的信息 (水系 、道路网等) 为先验知识 ,利用多尺度模板匹 配法对 TM 影像中的线状信息进行自动提取 。把自动提取的结果作为像方观测 ,矢量地图数据作为地面观 测 ,通过广义点摄影测量原理和方法 ,解算出 TM 影像的外参数 ,实现新的 TM 影像和旧的 GIS 矢量数据的 自动配准 。实验结果表明 ,一般情况下 ,本文方法达到了像素级精度 ,且大大提高了工作效率 。 关键词 : TM 影像 ; GIS 矢量地图 ;线状地物 ;广义点摄影测量 ;自动配准 中图法分类号 : P237. 3 ; P208
第 30 卷 第 11 期 2005 年 11 月
武 汉 大 学 学 报 ·信 息 科 学 版 Geo matics and Info rmation Science of Wuhan University
Vol. 30 No . 11 Nov. 2005
文章编号 :167128860 (2005) 1120950205
基于 GIS 矢量数据信息与 TM 影像中线状 信息的融合 ,可以实现新的 TM 影像与旧的 GIS 矢量数据的自动配准 。首先 ,用 3 到 5 个粗略对 应点 ,确定 TM 影像和 GIS 矢量数据间的近似变 换关系 ,在此基础上 , 以 GIS 矢量数据信息 (水 系 、道路网等) 作为先验知识 ,利用多尺度模板匹 配法对 TM 影像相应线状地物进行自动提取 。 将 GIS 矢量数据信息与 TM 影像相应线状地物 信息进行融合 ,通过广义点摄影测量原理和方 法[5] ,解算出 TM 影像的外参数 ,实现新的 TM 影像和旧的 GIS 矢量数据的自动配准 ,其流程如 图 1 所示 。
传统的 摄 影 测 量 是 基 于 点 的 变 换 和 参 数 解 算 ,而在矢量数据与影像之间确定点对应关系比 较困难 ,因为通常情况下 ,特征点较少 ,并且难以 精确量测 ,而线状地物特征大量存在 ,并且量测相 对容易 ,所以能否利用矢量数据和影像上存在的
大量线特征作为控制信息进行参数解算具有重要 意义 。基于此 ,Mulawa[8] 提出了基于直线的摄影 测量 ,即利用地面观测和对应影像观测的直线特 征之间的关系列出条件方程 ,平差解算影像外参 数 。对于框幅式中心投影成像方式而言 ,可以根 据物 、像方直线共面条件列出条件方程 ,从而解求 影像 的 外 参 数[9] 。但 对 于 CCD 扫 描 式 成 像 的 TM 影像而言 ,一条直线特征上的不同点有不同 的外参数 ,因此很难用共面方程描述线状特征的 成像条件 。可见 ,遥感影像和 GIS 矢量数据之间 的自动配准问题 ,到目前为止还没有一个有效的 解决途径[4] 。
信息进行自动提取 。
应影像窗口的相关系数 :
mn
mn
mn
ρ( c , r) =
∑∑ ∑∑ ∑∑ · ′ 1 ′ gi, j
· i = 1 j = 1
g i+r, j+c - m
g ( g ) i , j
i+r, j+c
n i =1 j =1
i =1 j =1
(1)
mn
mn
mn
mn
∑∑ ∑∑ ∑∑ ∑∑′ 1 1 [
目前 ,我国已经完成了除部分荒漠地区外的 基本比例尺地形图的测图计划 。随着经济的发展 和自然因素的影响 ,地表在不断发生变化 ,然而空 间数据更新的情况却不容乐观 。据联合国测量署 的统计 ,全球 1 :5 万和 1 :2. 5 万的地图更新周期 分别是 50 a 和 20 a ,这种更新速度显然无法适应 现代社会飞速发展的需要[1] 。遥感影像是目前地 图更新的主要数据源 ,而遥感影像和地图的精确 配准是地图更新的首要步骤 。
TM 影像与地面平面坐标间的仿射变换关系 ;利 用仿射变换将矢量数据 ( 水系 、道路网) 投射到 TM 影像上 ,作为 TM 影像上线状信息提取的初 值 ;用多尺度模板匹配的方法对 TM 影像中线状
点 。由于不知道线状地物的宽度 ,采用一系列带 状模板 ,分别设计模板的像素宽度为 3 、5 、7 、9 、11 与 13 像素 。在每一条线段中 ,在不同的等分点处 沿着法线方向分别计算这些不同宽度的模板与相
b6 X3 + b7 X2 Y + b8 X Y2 + b9 Y3
(2)
由前述线状地物自动提取过程可知 , 从影像
上提取的线状地物上的特征点都对应着矢量地图
952
武 汉 大 学 学 报 ·信 息 科 学 版
2005 年 11 月
上的一条线段 (包含两个端点) 。根据式 (2) ,将地 图上每一线段的两端点 P1 ( X1 , Y1 ) 和 P2 ( X2 , Y2 ) 投射到影像上 ,得到影像上的两点 p1 ( x1 , y1 ) 与 p2 ( x2 , y2 ) , 若该线段对应的特征点为 p ( x , y) ,则从点 p 到线段 p1 p2 沿 x 或 y 方向的距离 分量 v x 或 v y 应当为零 。每个特征点只列出一个 误差方程 。当 p1 p2 与水平方向夹角θ满足 - 45° ≤θ< 45°或 135°≤θ< 225°时 ,误差方程为 :
g2 i, j
-
· · i = 1 j = 1
m
( n i =1
j =1
gi, j ) 2 ][
i =1
j =1
g′2 i+r, j+c
-
m
( n i =1
j =1
g i+ r, j+c) 2 ]
其中 , m 、n 表示计算相关系数的影像块行列数 ; r、
c 表示搜索区域的位置 ; g 、g′分别表示模板和影
图 2 线状地物特征点搜索示意图 Fig. 2 The Sketch Map of t he Searching for of t he
Characteristic Point of t he Line2like Object
像和矢量地图上人工概略选 3~5 个对应点 ,建立
采用模板匹配的方法提取线状地物中的特征
2 TM 影像外参数解算
a6 X3 + a7 X2 Y + a8 X Y2 + a9 Y3 y = b0 + b1 X + b2 Y + b3 X2 + b4 X Y + b5 Y2 +
如前所述 ,对于 CCD 扫描式成像的 TM 影像 而言 ,一条直线特征上的不同点有不同的参数 ,因 此很难用共面方程描述线状特征的成像条件 ,需要
vy
=
y1
+
y2 x2
-
y1 ( x x1
x1 )
-
y
(3)
当 p1 p2 与水平方向夹角θ满足45°≤θ< 135°
或 225°≤θ< 315°时 ,误差方程为 :
vx
=
x1
+
x2 y2
-
x1 ( y y1
y1 )
-
x
(4)
将误差方程线性化后迭代平差 , 可求得 TM 解影像参数 a0 , a1 , …, a9 , b0 , b1 , …, b9 。
矢量数据由一系列点连成线段所组成 。将每 段线段等分为若干部分 (如图 2 所示) ,一般间隔 以 5~10 个像素为宜 。以等分点为起点 ,沿法线 方向在一定范围内搜索特征点 。图 2 中实折线是 矢量数据根据仿射变换叠加到影像上的结果 ,虚 折线为对应的影像特征 。垂直于实折线的一组虚 线是等分点的搜索范围和方向 。
像的灰度 。由于相关系数是标准化的协方差函
数 ,因而当目标影像的灰度和搜索区影像的灰度
之间存在线性畸变时 , 仍然能较好地评价它们之
间的相似程度 。可以证明 , 影像灰度经线性变换
后相关系数是不变的[7] 。沿着法线方向选出相关
系数绝对值较大的 2~3 个匹配位置 ,然后根据以 下规则滤除噪声点 :属于同一线状地物的特征点 对应的相关系数正负号应一致 , 即要么都为亮特 征点 ,要么都为暗特征点 ;与初值的距离应相差不 大 。滤除噪声点后 , 对每一线段选取最佳的一个 特征点 (如图 3 所示 ,特征点用“ + ”表示) 。
针对如何实现自动配准的问题 ,学者们见仁 见智地开展了研究 。Drewnio k[2] 利用规则的人 工标志地物作为控制要素 ,根据它们的特征从影 像上提取对应的理想模板 ,通过模板匹配实现影 像和地图的配准 。这种用单一模板进行匹配的方 法失败率较高 。Schickler[3] 分别在地图和影像上 提取特征地物 (如房顶) ,然后把提取的结果进行 关系匹配 ,从而实现二者的配准 。由于基于影像 的地物自动提取算法还不成熟 ,这种方法需要较 多的人工交互 。