地磁匹配导航算法研究
地磁匹配算法的研究现状及改进策略
地磁匹配算法的研究现状及改进策略肖晶;齐晓慧;段修生【摘要】地磁导航算法是地磁辅助导航系统的核心.首先,分析了地磁匹配算法的基本原理;然后,以此为基础从特征空间、相关性度量、搜索空间和搜索策略4个方面总结了地磁匹配算法的研究现状和改进方法;各种新方法的引入为匹配策略的改进提供了新的思路;最后,根据工程应用中的实际问题,指出了地磁导航算法的改进策略,为其工程化应用奠定了基础.%Magnetic navigation algorithm is the key to geomagnetic aided navigation systems.At first,the basic principle of the magnetic matching algorithms is analyzed.On the basis of this,the research status and improving methods are summarized from four aspects of characteristic space,relativity measurement,search space and search strategy.The introducing of various new methods supplies some new ideas to modify the matching method.Finally,based on the problems appeared in engineering applications,the improvement strategies of the geomagnetic navigation algorithm are pointed out,which can be taken as a reference for the algorithm's engineering application.【期刊名称】《电光与控制》【年(卷),期】2018(025)001【总页数】6页(P55-59,73)【关键词】地磁辅助导航;地磁匹配;组合导航;算法;综述【作者】肖晶;齐晓慧;段修生【作者单位】陆军工程大学,石家庄050003;陆军工程大学,石家庄050003;陆军工程大学,石家庄050003【正文语种】中文【中图分类】U666.10 引言惯性导航、卫星导航和地形导航是目前无人机导航的常用手段,其中,惯性导航为主要的导航方式,可以连续、自主地提供载体的全导航信息。
地磁匹配导航算法综述_邓翠婷
等提出了适合地磁场数据的地
磁匹配双等值线( Dual Iterative Closet Contour Point, DICCP) 算法, 修正了惯导系统的航迹, 能够获得较 DICCP 高的导航定位精度。与传统 ICCP 算法相比, 算法在没有增加测量设备的前提下, 通过在测量过 程中多结算一个参数就完成对两个匹配特征量的 量测, 因此该算法可以应用于具有多匹配特征量的 定位场合。 在景 象 匹 配 中 得 到 广 泛 应 用 的 相 位 相 关 算 法
, 也有文献称之为代价函数或者相
[22 —24 ]
, 它们是选择最优匹配组的判断
6126
科
[25 —27 ]
学
技
术
与
工
程
[21 , 34 ]
12 卷
目前, 相关性准则主要有三类
( 见表 1 ) :
用 HD 作为地磁匹配算法的相关性准则
。
一类是强 调 他 们 之 间 的 相 似 程 度, 如互相关算法 ( COR) 、 相关系数算法 ( CC ) 、 积相关算法 ( PROD ) 和归一化积相关算法( NPROD) ; 一类是强调他们之 间的差别程度, 如平均绝对差算法 ( MAD ) 、 均方差 算法( MSD) 、 绝对差算法 ( AD ) 、 平方差算法 ( SD ) ; 一类是基于 Hausdorff 距离的相似算法( HD) 。 在计 第一类算法应求极大值, 另两类 算最佳匹配点时, 应取极小值。 基于 COR 匹配得到的极大值, 即使在最理想情 况下也不是唯一的, 算法稳定性和精度较差。CC 虽 COR 和 CC 不适 然精度很高, 但运算量很大。因此, 合作为匹配结果的判断准则。 从算法匹配精度来 MAD 和 MSD 优于 NPROD 和 HD; 从匹配运算量 看, MAD < MSD < NPROD < HD 来看,
地磁匹配导航

系统组成:INS、地磁传感器、地磁基准图以及解算计算机等。
地磁匹配系统的工作原理: 飞行器在飞越航线上某些特定的区域(地磁匹配区)时,利用地磁传感器 测量飞行器的地磁强度值;同时根据惯性导航系统所输出的位置信息, 从 地磁基准图中某一区域内提取相应的数据信息。利用匹配算法对地磁强度的 实时测量值和基准图上的数据进行匹配获得最佳匹配位置, 并利用位置信
4. 将载体的实时航行位置输出。
地磁匹配导航的形式化模型 由地磁匹配系统的原理知, 地磁匹配模型可以形式化的描述如下: 状态方程(INS误差模型):
ek 1 f k (ek , k )
观测方程(观测模型):
已知信息:
其中,
地磁匹配的目的是根据DTED,在获得已知信息Dk的情况下,估算航行
地磁匹配导航在算法上实质就是数字地图匹配。载体在航行过程中, 将实时测 量的地磁特征信息序列构成实时图, 然后, 利用各种信息处理方法, 将实时图与地 磁数据库中存贮的基准图数据进行比较, 依一定的准则判断两者的拟合度, 确定 实时图与基准图中的最相似点, 即最佳匹配点
地磁场建模 地磁场建模时构建与位置相关的数学关系式,以反映背景场的地磁变化。 建立地磁场模型的方法主要有拟合建模法、内插法和基于位理论的建模法。
息校正惯性导航系统。
地磁匹配导航的特点:
(1)可与惯性导航系统组合使用,校正远程制导中的积累误差。
(2)可弥补巡航导弹现有中制导方式在跨平原、水域作战时存在的缺陷。
(3)可实现变轨制导,提高导弹的突防能力。 (4)属于被动制导,具有良好的隐蔽性和抗干扰性。
地磁导航过程为: 1. 在载体活动区域建立地磁场数学模型, 并绘制出数字网格形式的地磁 基准参考图, 存贮在导航系统数据库中。 2. 由安装在航行载体上的地磁传感器实时地测量地磁场数据, 经载体运 动一段时间后, 测量得到一系列地磁特征值序列, 经数据采集系统输 送至计算机, 并构成实时图。 3. 由计算机运用相关匹配算法,将测量的地磁数据序列信息与存储在数 据库中的地磁图进行比较, 按照一定的准则判断实时图在区域地磁数 据库中的最佳匹配位置。
地磁匹配导航中几项关键技术研究
l 一1 ∑ .
式 () 2 中测点 间 的变 异 函数 用 y , ) 示 , 点 ( 表 测 与插值 点 间的变异 函数 用 y K , ) ( 表示 , 小 化 处 极 理时 的拉格 朗 日乘 数 用 表 示 。式 ( ) 以表 示 为 2可 矩阵形 式
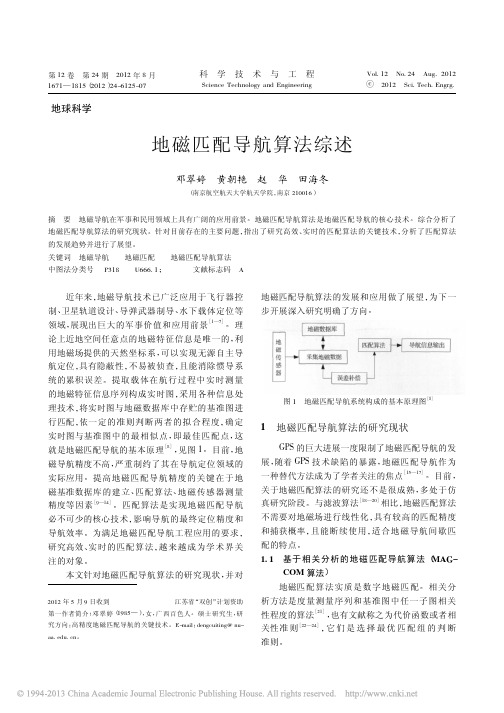
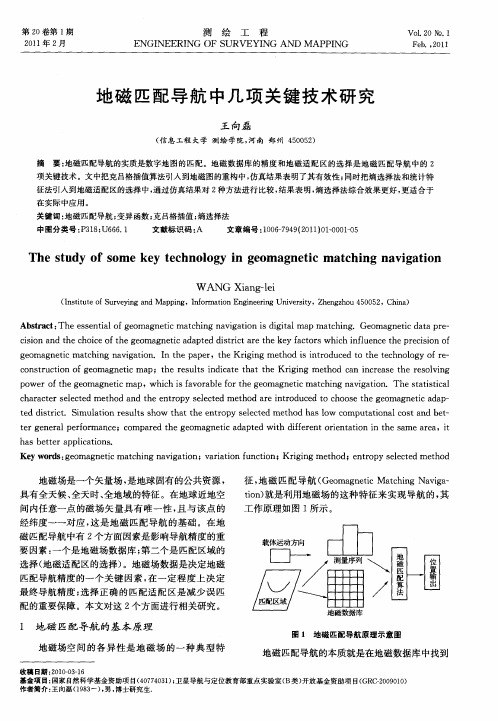
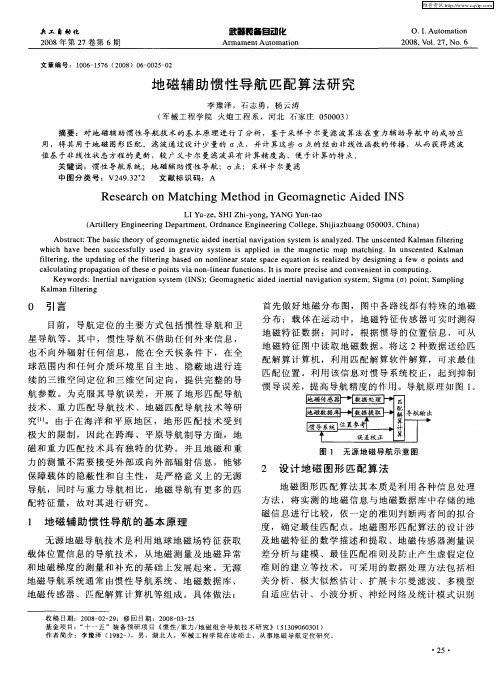
征 , 磁 匹 配 导 航 ( o g ei MacigNaia 地 Gemant thn vg— c t n 就是 利用 地磁 场 的这 种 特征 来 实 现 导航 的 , i ) o 其 工作 原理 如 图 1 示 。 所
磁匹配导航中有 2 个方面因素是影响导航精度的重 要因素 : 一个是地磁场数据库 ; 第二个是匹配区域的 选择( 地磁适配区的选择) 。地磁场数据是决定地磁
域[ 。以 区域 化变 量 理 论 为基 础 、 异 函数 为分 析 变
置 。导航 时 , 首先把 预 先 准 备 的地 磁 场 数 据存 储 在 计算 机 中 , 成数 字 地 磁基 准 图 。当载 体 运 动 到特 构 定 匹配 区域 时 , 由地磁 传 感 器测 量所 在 位 置 的地 磁 场 特征 , 载体运 动一段 时 间后 , 量得 到一 系列 的 近 测 实 时地 磁特 征值 , 称 为 序列 。把测 量 序 列 与 基准 简 图进行 匹配 , 出基 准 图 中与 测 量 序列 量 最 匹 配 的 找
第2 O卷第 1 期
2 1 年 2月 01
测
绘
工
程
Vo. O № . 12 1
Fe .。 0 1 b 2 1
ENG I NEERI NG 0F U RVEYI S NG AND AP NG M PI
基于仿射模型变换的地磁匹配导航算法_罗诗途
第18卷第4期中国惯性技术学报Vol.18 No.4 2010年8月 Journal of Chinese Inertial Technology Aug. 2010文章编号:1005-6734(2010)04-0462-04基于仿射模型变换的地磁匹配导航算法罗诗途,任治新(国防科学技术大学机电工程与自动化学院,长沙 410073)摘要:为了提高潜航器上地磁匹配的效率和精度,通过对潜航器惯导系统误差模型的分析,提出了一种基于仿射模型变换的粗精两级地磁匹配定位方法。
首先,利用基于等值线约束的相关匹配算法消除导航系统的初始位置误差;其次,采用仿射模型对相关匹配结果的轨迹进行旋转、缩放变换,通过参数扫描实现精匹配的过程。
该算法在保证实时性的同时,匹配精度优于1个网格点。
关 键 词:潜航器;惯性导航;误差模型;仿射模型;地磁匹配中图分类号:U666.1 文献标志码:AGeomagnetic matching algorithms based on affine modelLUO Shi-tu, REN Zhi-xin(College of Mechatronics Engineering and Automation, National University of Defense Technology, Changsha 410073, China)Abstract: To improve the efficiency and precision of undersea vehicles, a two-level geomagnetic matching (roughand fine) algorithm using affine model transposition is put forward based on the analysis of the INS (inertialnavigation system) error models of underwater vehicle. First, it uses the correlation matching method, which is basedon contour constraint, to eliminate the initial position error of INS. Then, it uses an affine model to circumgyrate andzoom the tracks obtained from correlation matching results. Finally, through scanning correlation parameters, theaccurate matching process is realized. Experiments show that the algorithm not only meets the real time requirement,but also has the matching precision of better than one grid.Key words: underwater vehicle; inertial navigation; error model; affine model; geomagnetic matching地球物理场(Geophysical Fields of the Earth,GFE)辅助的惯性导航系统是一种有着广泛发展前景的组合导航系统,是自主导航技术研究的新方向。
地磁辅助惯性导航匹配算法研究
地磁 辅 助 惯性 导 航 匹配 算 法研 究
李 豫 泽 , 石 志 勇 , 杨 云 涛 ( 械 工 程学 院 火炮 工 程 系 ,河 北 石 家庄 0 00 ) 军 5 0 3
摘 要 :对 地磁 辅 助惯 性 导航 技 术 的基 本 原理 进 行 了分析 ,鉴 于采样 卡 尔曼 滤 波算 法在 重 力辅 助导 航 中的成 功应 用 ,将 其用 于地 磁 图形 匹配 。滤 波通 过设 计 少量 的 。点 ,并 计 算这 些 。点 的经 由非线 性 函数 的传 播 ,从 而获 得 滤波 值 基 于 非线 性状 态 方程 的 更新 ,较 广 义 卡 尔 曼滤 波具 有计 算 精度 高、便 于计算 的 特 点。
首 先 做 好 地 磁 分 布 图 , 图 中各 路 线 都 有 特 殊 的地 磁
分 布 ; 载 体 在 运 动 中 ,地 磁 特 征 传 感 器 可 实 时测 得
地 磁 特 征 数 据 ; 同 时 ,根 据 惯 导 的 位 置 信 息 ,可 从 地 磁 特 征 图 中读 取 地 磁 数 据 。将 这 2种 数 据 送 给 匹 配 解 算 计 算 机 ,利 用 匹 配 解 算 软 件 解 算 ,可 求 最 佳 匹 配 位 置 。 利 用 该 信 息对 惯 导 系 统 校 正 ,起 到 抑 制 惯 导 误 差 ,提 高 导 航 精 度 的 作 用 。导 航 原 理 如 图 1 。
Ke wo d : n ril a i ai n s se (NS) y r s I e t vg to y tm I an ;Ge ma n tcad di e t l a i ai n s se Sima( )p it S mpi g o g ei ie n ri vg to y tm; g an o on; a l n
航空平台地磁矢量匹配导航算法研究进展
航空平台地磁矢量匹配导航算法研究进展
陈棣湘;陈卓;张琦;潘孟春
【期刊名称】《中国测试》
【年(卷),期】2024(50)5
【摘要】航空地磁矢量导航技术因其具有自主、无源、可靠性强的优势,在卫星导航系统受到攻击等情况下可有效发挥替代作用,在军民用领域均具有极高的战略意义和应用价值。
航空平台具有飞行速度快、短时间跨越地域广的特性,对地磁矢量测量与导航方法提出高精度和高可靠性等要求。
该文梳理近年来航空地磁矢量导航系统的研究与发展现状,介绍地磁矢量导航的关键技术,重点对地磁矢量匹配导航算法的研究进展进行分析。
针对现有算法存在的不足,提出进一步提升算法的精度和鲁棒性、发展基于机器学习的地磁矢量匹配导航方法、推动无人机等新型航空平台地磁矢量导航技术发展等后续研究方向,意在促进航空地磁矢量导航技术的进一步发展。
【总页数】10页(P1-10)
【作者】陈棣湘;陈卓;张琦;潘孟春
【作者单位】国防科技大学智能科学学院
【正文语种】中文
【中图分类】TB9;TH744
【相关文献】
1.基于ICCP的地磁矢量匹配算法研究
2.一种提高DTW运算效率的地磁匹配组合导航算法
3.一种适用于地磁梯度匹配导航的ISCCP算法
4.基于向量搜索的地磁导航匹配算法研究
5.基于地磁匹配辅助导航的改进A*算法路径规划
因版权原因,仅展示原文概要,查看原文内容请购买。
地磁匹配导航算法及地磁场模拟系统研究论文论文

Classified Index: V448. 2Dissertation for the Master Degree in Engineering RESEARCH ON THE GEOMAGNETIC NAVIGATION MATCHING ALGORITHM AND THE GEOMAGNETIC FIELD SIMULATION SYSTEMCandidate:Supervisor:Academic Degree Applied for: Specialty:Affiliation:Date of Defence:Degree-Conferring-Institution: Liu YayunProf. Wang ChanghongMaster of EngineeringControl Science and Engineering Dept. of Control Science and Engineering June, 2011Harbin Institute of Technology摘要摘要地磁辅助导航系统是一种自主导航方法,隐蔽性强,不受地形和恶劣天气的影响,具有全天时、全天候和全地域的特点,作为一种新的导航方法,地磁辅助导航在航空、航天和航海等领域将发挥越来越重要的作用。
因此开展地磁辅助导航理论研究,建立用于地磁导航系统评估和验证的地磁场模拟系统,具有重要的理论和实际意义。
地磁匹配算法作为地磁辅助导航系统的核心技术之一,它的优劣将直接影响整个系统的导航精度和匹配效率。
本论文首先针对常见的地磁匹配算法MAGCOM 算法和ICCP 算法进行了研究,并对这两种算法的匹配效果进行了仿真,结果表明MAGCOM 算法简单,运算速度快,但是精度比较低,不能校正航向误差;ICCP 算法可以对航向误差进行校正,并且精度比较高,但是初始误差不能过大,否则容易匹配失败,并且容易陷入局部最优。
其次,针对上述算法的不足,提出了将遗传模拟退火混合算法和ICCP 算法相结合的新的匹配方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
jn 0 0 4,Chn ;3 6 9 9Tr o s ej g 1 0 9 ig 1 0 9 ia . 3 9 o p ,B in 0 0 thn vg t n Alo i m( sr c : o g ei Mac ig Naiai g r h GMNA)i a o tn co i e c h a iain c o t s ni ra tf trt i l n et en vg t mp a onu o
中 图 分 类 号 : 3 8U66 1 P 1 ; 6 . 文献 标 志 码 : A 文 章 编 号 :0 674 (0 10 —060 1 0-9 92 1 )20 0 —5
Re e r h o o a n tc M a c n a i a i n Al o ih s a c n Ge m g e i t hi g N v g to g r t m
fr rt a iain ag r h s r ohb sdo es gep it ome won vg t lo tm eb t a e nt i l o n ,whc k st e h v ec-f c n y h o i a h n i ma e m a et o ef i c :t e h h h ie
于向量 的地 磁 匹 配 导 航 算 法及 其 改 进 算 法 : 于 基 Mo t al ne r C o的地磁 匹配导航算法 。
天然的坐标 系 。地磁 匹 配导航 的 过程就 是 一个用 地
磁 场信息进行 导航 的过 程 。理 论上 近地 空 间 的任 意 点的地磁场矢量是不 相同的 , 且与地理 经纬度 是一一
磁 场参 数与 地磁 数 据 库 进 行 相关 处 理 , 而得 到 最 从 后 的结 果 。其基 本步 骤 如下 :
一 \ 。一
1 匹配 参数 的获 取 。载 体上 的地 磁传 感器 实 时 ) 测 出某 一点 的地 磁参 数并 通 过一 定数 据处 理后 得 到
匹 配用 的参 数 。
第 2 0卷 第 2期
2 1 年 4月 01
测
绘
工
程
VoI O № . .2 2
ENGI NEERI NG oF SURVEYI NG AND APPl M NG
Ap . 2 1 r。0 1
地 磁 匹 配 导 航 算 法 研 究
王 向 磊 丁 硕 。 苏 牡 丹 。 , ,
地磁场是一个 随时间和空 间变化 的函数 , 同时也
是一个矢量 场 。地 磁场 可 以为航 空 、 天 、 航 航海 提供
果 。现在 国内外 关 于这方 面 的研 究 主要是从 两个 方
面: 一个是滤 波 , 一个是 相关 极 值 。在 这里 主要研究 基于相关极值 的匹配导航算法 , 本文研 究 了基于 点的 地磁匹配导航算法 , 匹配导航算法 存在匹配 时间 这种 长、 容易出现多值 的缺 点 , 针对 这两 个缺 点提 出 了基
基本原 理 。
地 磁 匹配 导航 大 概 可 以分 为 以下 几 个 步 骤 : 一
磁数 据库 ( 点位 的数 字 地 磁 参 数 库 ) 当 载体 在 这 一 , 区域运 动时 , 安装 在 载 体 上 的地 磁 传 感 器会 以一 定 的 时 间间隔 测 出所 在 处 的 地磁 场 参 数 , 用测 出 的地
2 确定 搜索 区域 。根据 地磁 传感 器 的测量 误差 ) 确 定搜 索 区域 。 3 进 行 相关 分析 。相 关 分析 就是 采用 一定 的相 )
对应 的 , 知道 了任意点 的地磁 场矢 量也就 知道 了该点
的位置信息 , 是地磁 匹配导航 的基础 。地磁 匹配导 这
航有其 自身 的特点和优势 , 如其 自主性 、 例 隐蔽性 , 所 以地磁 匹配导航一开始就受 到各 国学者 的关注 , 特别
是军方用户 的青 睐 。在 地磁 匹配 导航 中地 磁 匹配导
在 文献 [ ] 4 中已经 证 明 了上 面 的 3种 相 关处 理
方 法 中 , 均 绝 对 差 法 MS Men S u r va 平 D( a q aeDe i —
t n 是 效果 最佳 的 , 以本 文 在 下 面 的地 磁 匹 配 导 i ) o 所 航 算法 中都 采用 平均 绝 对差 法 。
地 磁 匹配 导航 的基 本 原 理
地磁匹配导航 是指利 用地 磁 图特征 与当地及 时
航 算法是其关键 , 一定程度上决定 了最终 的导航结 在
测量地磁特 征信息 进行 匹配 的过程 。在近地 空 间地
收 稿 日期 :0 00 —6 2 1—31 基 金项 目 : 国家 自然 科 学 基 金资 助 项 目 (0 7 0 1 ; 星导 航 与 定 位 教育 部 重 点 实 验 室 ( 4 7 4 3 )卫 B类 ) 放基 金 ( C 2 00 0 开 GR -0 9 1 ) 作者 简 介 : 向磊 ( 9 3 )男 , 士 研 究 生 . 王 18一 , 博
W ANG a g l i DI Xi n -e , NG hu , S o SU u da 。 M — n
( . n t u eo u v y n n p i g,I f r t n En i e r g Un v r iy h n z o 5 0 2 1 I s i t fs r e i g a d ma p n t n o ma i g n e i ie st ,Z e g h u 4 0 5 ,Ch n ;2 6 0 1Tr o s e— o n ia . 1 8 o p ,B i
t e ra- i u o t e ln i fp st n Ad r s e o t e p o l wh c x ss i h e l me d e t h g t t o meo i o . o i d e sd t h r b e m i e it GM NA a e n p it h n b s o on , d G I s n t ev c o r p s d A b e o h e t ri p o o e ,wh c a if dw t era- i e d d t h a i a in s se a d s ih i s t i h t e l men e e o t en vg t y tm.T e s se i h t o h
ma c n o nq e T k n n o a c u t ft i ,t eGMNA a e n t e M o t a l r u h u ,wh c th g i n tu iu . a i i t c o n h s h i s g o b s d o h n e C ro i b o g t t i h s o i o h a i o h n , n a v r o ee f i c y me n f h o sr t n a n e p i t Th i - s n t eb s f el e a d c n o e c met f c n y b a s ec n t c i mo g t o n  ̄ s t i h ie o t i o h es e r ua in r s l r h we i n te e y G 7 lt e u t a e s o d ami g a v r A o s A Ke r s g o g e i ma c i g n v g t n;GM NA ;M o t a l y wo d : e ma n t t h n a i a i c o n e c ro;c s u c i n;v c o o tf n to etr
\
3 地磁 匹配 导 航 算 法
3 1 基于 点 的地磁 匹 配导 航算 法 .
/
基 于点 的地 磁 匹配 导航算 法 实 际上是 一种 在一
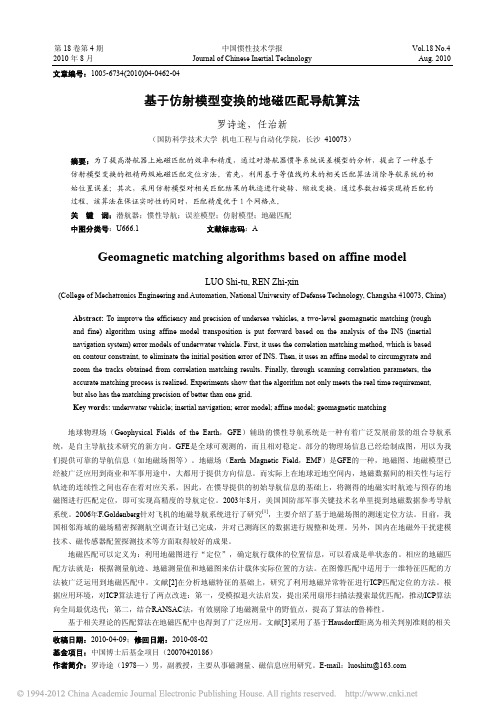
图 1 地磁 匹配导航基本原理
定 区域 的地 磁数 据 库 中 搜 索 的 方法 , 种 方法 通 过 这
在 一定 区域 内搜 索使 代 价 函数最 小 的点来 得 到最佳 匹 配点 。其 基本 原 理 是 : 一 定 区域 内建立 基 本 地 在
向量 的地磁 匹配导航算法 , 满足导航系统对实时性 的要求 。基于点 的地磁 匹配 导航算法和基 于向量的地磁 匹配导
航算法都是基于单点的匹配算法 , 这决定 了它们有共 同的缺陷 : 匹配 结果 可能不唯一 。针对这一点提 出基 于 Mo t ne
Cr al o的地磁匹配导航算法 , 这种匹配算法是一种基 于线的 匹配算 法 , 通过 各个点之 间的约束可 以克 服前面两种算 法匹配结果 不唯一的缺陷。针对每一种算法给出仿真结果 。 关键词 : 地磁 匹配导航 ; 地磁 匹配导航算法 ; neC r ; Mo t al 代价 函数 ; o 向量
导航 时 , 首先 把 预先 准备 好 的地 磁 场 信 息 存 储
在计算 机 中 , 成 基 本 地 磁 数 据 库 。当载 体 运 动 到 构
特 定 的匹 配 区域 时 , 载体 携 带 的地 磁 传 感 器 测 量 所
处位 置 的地磁 场特 征信 息 。把 测量 的 地磁 场信 息 与 地磁数 据 库进行 相 关 匹配 , 出地 磁 数 据 库 中 与实 找 测地磁 场 特征 最接 近 的点 。这 就是 地磁 匹 配导 航 的
p e io e n u lot et .F rt nt i p p r rcs n d ma db t s me is,i hs a e i a h i G
b sdo on tde ,whc n aif t a e np iti su id s ihi u st i wi s se d h
(. 息 工程 大 学 测 绘 学 院 , 南 郑 州 4 0 5 ; . 18 部 队 , 京 10 9 ;36 9 9部 队 , 京 10 9 ) 1信 河 502 2601 北 004 .39 北 00 4