systemc的TLM2.0简介
SystemC在Turbo码实现和验证中的应用

SystemC在Turbo码实现和验证中的应用李源【摘要】在简述System C的设计方法和流程的基础上,针对SystemC在硬件芯片系统级设计和寄存器传输级设计的特点,以Turbo编码器为对象和开发目的,研究了SystemC基于寄存器传输级设计的可实现性,利用SystemC的模块化功能,通过分析Turbo编码器的结构与信号流图,进行建模仿真直到最后完成划分硬件模块与编程并在FPGA完成其实现与验证,充分证明了SystemC完全适用于基于寄存器传输级设计的IC应用.此外,此设计将系统级设计与寄存器传输级设计的工作合二为一,大大节省了开发的流程时间.【期刊名称】《现代电子技术》【年(卷),期】2009(032)005【总页数】4页(P163-166)【关键词】SystemC;Turbo;系统级设计;寄存器传输级;FPGA;测试平台【作者】李源【作者单位】上海交通大学,上海,200030【正文语种】中文【中图分类】TP2740 引言在传统硬件设计方法中,系统级设计(SLD)往往使用高级语言进行描述以实现各功能模块的算法,而在寄存器传输级(RTL)使用硬件描述语言如VHDL和Verilog HDL进行描述。
但随着深亚微米时代的到来,集成电路规模越来越复杂,为了实现较高层次如系统级的软件和硬件描述,较好地实现软硬件的协同设计,业界推出了SystemC语言,但是SystemC的优点并不仅仅是针对于此,而且还表现在它使得系统级设计和RTL级设计均可能在同一平台下完成。
本文主要针对SystemC可以像使用VHDL或者Verilog语言一样进行RTL级和行为级的建模的特点,讨论了基于SystemC RTL级设计的Turbo编码器的实现和验证,并在FPGA平台上进行其系统实现。
1 SystemC简介SystemC[1,2]是由开放性、非盈利性的SystemC联盟组织(Open SystemC Initiative,OSCI)推出的一种系统级设计和验证语言,SystemC是基于C++的建模平台,其本质是在C++的基础上添加了硬件扩展库和仿真核,支持EDA设计中的各个抽象层次,如寄存器级、行为级、系统级的建模,能够表达并发性、实时性、交互性等硬件模型的概念。
SystemCMIPS

SystemCMIPS⽬录1 SystemC的背景知识 (1)2 MIPS 3种指令的流程..............................................................................................................2-63 SystemC设计MIPS...............................................................................................................7-12 4总结 (13)参考⽂献 (13)⽤SystemC实现简单的MIPS SystemC的背景知识⽬前的电⼦产品设计存在2个发展趋势,1.电⼦产品的⾯市时间⽇益缩短2.电⼦产品和⼤有前途的基于平台设计⽅法,其复杂度都在不断增长这两点都要求建⽴⾼速的的可执⾏模型,以较⾼的抽象层次表达较低层次的电路结构。
SystemC正是在这⼀背景下诞⽣的。
业界认为,SystemC有望在1~2年内成为IEEE的标准。
学习该语⾔有助于将来向系统设计⽅向扩展。
学习SystemC要求的背景知识:⾸先必须了解C++语⾔的基础知识,这是不可或缺的。
其次还应该有逻辑设计的背景。
如果已经了解VHDL和V erilogHDL这两种⼴为流传的硬件描述语⾔中的任何⼀种,那么学习SystemC将会如鱼得⽔,但这不是必须的。
嘿嘿,可以偷懒了!MIPS 3种指令的流程MIPS是⼀种简洁的设计,指令集⽐较简单,因此成为⼤多CPU设计的⼊门教材。
下⾯以李亚明⽹站上的5级流⽔简略介绍⼀下。
这5级分别为:IF(取指),ID(译码),EXE(执⾏),MEM(读写内存),WB(写回)五个阶段。
借⽤⼀下⽹站上的图⽚图1我们可以看到图上⽤绿⾊标出的5根“棒⼦”,这是各个阶段的分界线,当然不只是分界的作⽤,他们其实是5个锁存器,⽤于保存上个阶段的信息。
cmmi2.0介绍
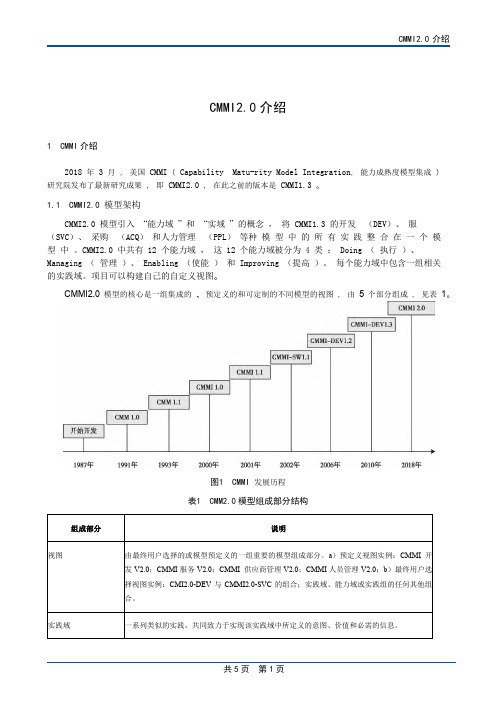
CMMI2.0介绍1 CMMI介绍2018 年 3 月,美国 CMMI ( Capability Matu-rity Model Integration,能力成熟度模型集成)研究院发布了最新研究成果,即 CMMI2.0 ,在此之前的版本是 CMMI1.3 。
1.1 CMMI2.0 模型架构CMMI2.0 模型引入“能力域”和“实域”的概念,将 CMMI1.3 的开发(DEV)、服(SVC)、采购(ACQ)和人力管理(PPL)等种模型中的所有实践整合在一个模型中。
CMMI2.0 中共有 12 个能力域,这 12 个能力域被分为 4 类: Doing (执行)、Managing (管理)、 Enabling (使能)和 Improving (提高)。
每个能力域中包含一组相关的实践域。
项目可以构建自己的自定义视图。
CMMI2.0 模型的核心是一组集成的、预定义的和可定制的不同模型的视图,由5 个部分组成,见表1。
图1 CMMI 发展历程表1 CMM2.0模型组成部分结构1.2 CMMI2.0模型的主要内容CMM12.0模型中的实践域等同于CMMI3模型中的过程域。
实践域是一组实践,它们共同描述已定义的意图和价值所需的关键活动表2 实践域组成及其包括的内容1.3 能力等级定义CMMI2.0模型的实践组中的实践是按照1级至5级能力等级进行安排的(见表3),每个等级都是在前一个等级基础上增加新的功能或能力要求,为组织改进提供一条清晰的路径。
表3 CMMI2.0实践能力等级1.4 CMM2.0-DEV视图当前,CMMI20模型中总共有4种能力域类型,12个能力域,39个实践域。
这39个实践共组成了4个预定义视图,但目前仅发布了CMM2.0-DEV视图,其余视图(CMMI2.0-SVC、CMMI2.0-SPM和CMM2.0-PPL视图)待陆续发布。
表4 CMMI2.0-DEV视图2 CMMI2.0-DEV视图与CMMI1.3-DEV的对比CMMI2.0-DEV视图实践域与CMMI.3-DEV过程域之间对比见表所述。
SystemC 的验证方法和流程介绍

SystemC 的验证方法和流程介绍1 引言当前集成电路制造技术迅速发展,SoC(system-on-chip)设计已经成为集成电路设计的发展方向。
随着SoC 设计的复杂度提高,在开发SoC 的过程中,验证工作越发重要和繁重,所占的开销占据总开销的40%70%。
SoC 设计的验证过程不但影响到芯片的成功设计,而且影响到芯片的上市时间,因此验证的正确性及其耗时的缩短成为了SoC 设计的关键。
传统设计中,系统级设计使用高级语言C/C++等描述功能模块的算法,验证的时候使用硬件描述语言(VHDL 或Verilog HDL)。
系统验证之前必须通过手工将原始的C/C++代码转换为VHDL/Verilog HDL 代码,这个转换过程耗时大并且容易产生错误。
在系统验证过程中,使用传统硬件描述语言对复杂模块的验证需要耗费大量时间。
为了提高系统级验证效率,本文针对视频芯片中的运动估计与补偿单元模块(MECU)提出了基于SystemC 的验证方法和流程。
该方法大大缩短了系统验证的搭建时间和系统验证过程的时间。
本文利用SystemC 支持设计者在不同抽象级建模的特点,给MECU 添加了低抽象级接口,使该单元能够和视频芯片内部其它模型通讯以便完成整个芯片的系统级验证。
本文最后的仿真结果证明了该设计流程的有效性。
2 SystemC 语言SystemC 是由C++衍生而来,本质是在C++的基础上添加了硬件扩展库和仿真核,这使SystemC 可以在不同抽象级对复杂电子系统建模。
它既可以描述纯功能的模型和系统体系结构,又可以描述软硬件的具体实现,进行软硬件的协同验证。
SystemC 包括以下建模元素:*模块(module)相当于C++的类定义,是一个可以多层次的实体。
一个模块可以嵌套其他模块和一些进程,是SystemC 里面最基本的单元。
*进程(process)用来描述模块的功能,包含于模块中。
进程是由事件(event)来触发的,这种触发的方式使进程可以并行执行,实现了硬件系统的并行特性,SystemC 包括三种不同的进程。
UVM_mentorpaper_使用手册

UVM:下一代验证方法学Mark Glasser,方法学建构师2011年2月4日UVM是验证业界为自身研发的一种新验证方法学。
UVM代表着验证技术的最新进展,使用它可创建坚实、可重用、具互操作性的验证IP和测试流程(testbench)组件。
UVM最新奇、最令人兴奋的方面之一却是它是如何被开发的。
UVM不是由一家EDA供应商开发的,也并非作为营销活动的一部分而推出,它是由众多业内专家联合开发的,他们来自微处理器公司、网络公司、验证顾问机构以及EDA供应商。
UVM的全部开发工作是在Accellera(一个标准化组织,致力于开发电子设计自动化领域里的标准和开放接口)架构下完成的。
在一个标准组织的旗帜下,各家公司(其中一些是市场上的对手)才能够在协作的环境中携起手来,以迎战建构一个先进验证方法学所面临的技术挑战。
每位代表为这一协同努力都贡献了他们所在行业的专业知识和视角。
其结果是为建构验证环境贡献出一个强大、多维的软件层和方法学。
当然,UVM已经在主要EDA供应商的所有模拟器上都进行了测试。
UVM的确是种真正的行业创举,Mentor以亲历其中而自豪。
UVM并非从天而降。
它集许多独立验证方法学的成果之大成。
其承继的资产包括AVM、URM,VMM和OVM。
图1. UVM的继承UVM承继的这些方法学提供了UVM得以建立其上的丰富的方法学库。
最值得注意的是,OVM-2.1.1是UVM的“起点”,是UVM得以孕育成功的种子代码库。
因此,UVM与OVM最相近,且大体上向后兼容OVM。
作为VMM一部分的RAL 包被转化为UVM的寄存器功能。
虽然上面提到的一系列方法学是UVM得以成就的种子,但UVM并非其前辈代码的简单叠加。
UVM为测试流程(testbench)建构提供了新功能和新的使用模式,从而将验证方法学提升到一个新高度。
寄存器在现代SoC设计中,寄存器集合是作为设计的接口。
通过寄存器——器件得以复位和配置;数据得以接收和发送。
基于stm32f103的usb2.0代码

基于STM32F103的USB2.0代码一、简介STM32F103是意法半导体推出的一款基于ARM Cortex-M3内核的微控制器,具有丰富的外设功能和较高的性能。
USB(Universal Serial Bus)是一种通用串行总线,广泛应用于计算机和其他电子设备之间的数据传输和连接。
基于STM32F103的USB2.0代码即指针对STM32F103微控制器开发的支持USB2.0标准的代码。
二、USB2.0USB2.0是Universal Serial Bus的第二代标准,具有高速传输和广泛兼容的特点。
USB2.0可以实现最高480Mbps的数据传输速度,是USB1.1标准的40倍。
在电脑外设、数字相机、移动设备等领域得到了广泛的应用。
三、基于STM32F103的USB2.0代码开发1. 硬件支持在使用STM32F103微控制器开发USB2.0代码时,首先需要确保硬件的支持。
STM32F103系列微控制器内部集成了USB OTG(On-The-Go)功能,支持USB2.0协议。
通过配置GPIO端口和时钟等硬件资源,可以实现与USB外设的连接。
2. USB Library意法半导体提供了相应的USB库,用于快速开发基于STM32F103的USB2.0代码。
该库包括了USB设备协议栈(Device stack)和USB主机协议栈(Host stack),可以根据实际应用选择相应的协议栈进行开发。
USB库还提供了丰富的例程和示例代码,便于开发者进行参考和调试。
3. USB协议栈在开发基于STM32F103的USB2.0代码时,需要了解USB协议栈的原理和实现。
USB协议栈主要包括物理层(Physical Layer)、传输层(Transport Layer)、设备层(Device Layer)和应用层(Application Layer)等,开发者需要对每一层的功能和接口进行深入理解,以便进行代码的开发和调试。
S7-200 Sim 2.0基本界面与基本操作
S7-200 Sim 2.0基本界面与基本操作一、S7-200 Sim 2.0基本界面:仿真软件界面仿真软件的界面上图所示,和所有基于Windows的软件一样,仿真软件最上方是菜单,仿真软件的所有功能都有对应的菜单命令;在工件栏中列出了部分常用的命令(如PLC程序加载,启动程序,停止程序、AWL、KOP、DB1和状态观察窗口等)。
常用菜单命令介绍Program|Load Program:加载仿真程序。
(仿真程序梯形图必须为awl 文件,数据块必须为dbl或txt文件)Program|Paste Program(OB1):粘贴梯形图程序Program|Paste Program(DB1):粘贴数据块View|Program AWL:查看仿真程序(语句表形式)View|Program KOP:查看仿真程序(梯形图形式)View|Data(DB1):查看数据块View|State Table:启用状态观察窗口View|TD200:启用TD200仿真Configuration|CPU Type:设置CPU类型输入位状态显示:对应的输入端子为1时,相应的LED变为绿色输出位状态显示:对应的输出端子为1时,相应的LED变为绿色CPU类型选择:点击该区域可以选择仿真所用的CPU类型模块扩展区:在空白区域点击,可以加载数字和模拟I/O模块信号输入开关:用于提供仿真需要的外部数字量输入信号模拟电位器:用于提供0~255连续变化的数字信号TD200仿真界面:仿真TD200文本显示器(该版本TD200只具有文本显示功能,不支持数据编辑功能)准备工作仿真软件不提供源程序的编辑功能,因此必须和STEP7 Micro/Win程序编辑软件配合使用,即在STEP7 Micro/Win中编辑好源程序后,然后加载到仿真程序中执行。
(1)在STEP7 Micro/Win中编辑好梯形图(2)利用File|Export命令将梯形图程序导出为扩展名为awl的文件,(3)如果程序中需要数据块,需要将数据块导出为txt文件。
基于TLM2.0的硬件虚拟平台设计
基于TLM2.0的硬件虚拟平台设计吴萌萌;张德学;王维克;闫霄颖【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2012(012)008【摘要】Hardware virtual platform based on TLM2.0 is created by model provided by Open Virtual Platform(OVP). It can offer a quick and efficient development environment for embedded software, and achieve the synergie design of software and hardware. The soft wares developed early can complete the functional verification for system virtual platform, analyze the performance of the system, and ensure the optimal system architecture.%利用OVP(Open Virtual Platform)提供的模型创建基于TLM2.0的硬件虚拟平台,可以为嵌入式软件提供一个快速有效的开发环境,实现软件和硬件的协同设计。
提早开发出的软件也可以对系统虚拟平台进行功能验证,分析系统性能,确定系统的最优架构。
【总页数】4页(P42-44,61)【作者】吴萌萌;张德学;王维克;闫霄颖【作者单位】山东科技大学信息科学与工程学院,青岛266590;山东科技大学信息科学与工程学院,青岛266590;山东科技大学信息科学与工程学院,青岛266590;山东科技大学信息科学与工程学院,青岛266590【正文语种】中文【中图分类】TP312【相关文献】1.基于TLM2.0的SPARC事务级建模 [J], 周海洋;葛宁;于立新;李玉红2.基于iPad运行环境的景观设计虚拟平台APP界面设计 [J], 樊俊泽;冯瑞芳3.基于wincc的智能家居虚拟平台的设计与实现 [J], 任天放;蒋石军;石佳琦;李姿4.基于wincc的智能家居虚拟平台的设计与实现 [J], 任天放;蒋石军;石佳琦;李姿5.基于SystemC的GPU软硬件协同虚拟平台构建方法 [J], 何嘉文;杜斐;聂瞾;田泽因版权原因,仅展示原文概要,查看原文内容请购买。
手把手教你学习DSM2.0
手把手教你学习DESIGNSPARKMECHANICALJuice Huang2014.11手把手教你学习DesignSpark Mechanical目录目录 (1)第一章DesignSpark Mechanical的基础准备 (4)1.1DesignSpark Mechanical软件的安装及启动 (4)1.1.1安装包下载 (4)1.1.2软件的安装 (4)1.1.3软件的启动 (4)1.2DesignSpark Mechanical用户界面介绍 (4)1.2.1操作界面环境 (4)1.2.2菜单栏 (4)1.2.3工具栏 (5)1.2.4特征管理器 (5)1.2.5特征选项 (5)1.2.6状态栏 (5)1.3DesignSpark Mechanical文档操作 (5)1.3.1新建文件 (5)1.3.2文件的打开 (5)1.3.3文件的保存和关闭 (6)1.4DesignSpark Mechanical视图定向操作 (6)1.4.1视图定向 (6)1.4.2选择特征 (7)1.4.2选择视图 (7)第二章DesignSpark Mechanical绘制草图 (9)2.1DesignSpark Mechanical进入草图 (9)2.1.1直接进入 (9)2.1.2间接进入 (9)2.1.3草图界面 (10)2.1.4退出草图的方法 (10)2.2DesignSpark Mechanical草图选项 (11)2.2.1草图选项和捕捉 (11)2.2.2草图尺寸 (12)2.2.3草图命令 (13)2.3DesignSpark Mechanical绘制草图 (14)2.3.1线条命令(线段、切线、参考线) (14)2.3.2矩形命令(矩形、三点矩形) (15)2.3.3椭圆命令 (15)2.3.4圆命令(圆、三点圆) (15)2.3.5多边形命令 (16)2.3.5圆弧命令(相切弧、三点弧、扫掠弧) (16)2.3.6点命令 (17)2.3.7样条曲线 (17)2.4DesignSpark Mechanical编辑草图 (17)2.4.1创建圆角 (17)2.4.2偏移曲线 (18)2.4.3投影到草图 (18)2.4.4创建角 (18)2.4.5剪掉和拆分曲线 (18)2.4.6草图移动 (18)2.4.7草图阵列 (19)2.4.8草图的尺寸修改 (20)2.5DesignSpark Mechanical草图绘制实例(一) (20)2.6DesignSpark Mechanical草图绘制实例(二) (22)2.7DesignSpark Mechanical草图绘制实例(三) (24)第三章DesignSpark Mechanical三维编辑 (27)3.1DesignSpark Mechanical三维选择 (27)3.1.1进入三维选择 (27)3.1.2三维特征选择 (27)3.2DesignSpark Mechanical三维拉动 (28)3.2.1进入三维拉动 (28)3.2.2三维拉动界面(拉动选项、拉动模式) (28)3.2.3三维面拉动 (30)3.2.4三维边拉动 (30)3.2.5三维旋转 (32)3.2.6三维扫掠 (33)3.2.7三维脱模斜度 (34)3.2.8缩放实体(面缩放、实体缩放) (35)3.3DesignSpark Mechanical三维移动 (36)3.3.1进入三维移动 (36)3.3.2三维移动界面 (36)3.3.3三维移动和旋转 (37)3.3.4三维移动(阵列) (37)3.4DesignSpark Mechanical填充 (38)3.4.2填充界面 (38)3.4.2草图填充 (38)3.4.2三维填充 (39)第四章DesignSpark Mechanical实体编辑 (40)4.1DesignSpark Mechanical实体操作 (40)4.1.1实体操作 (40)4.1.2实体组合 (40)4.1.3拆分主体 (42)4.1.4拆分面 (42)4.1.5投影 (43)4.2DesignSpark Mechanical插入操作 (45)4.2.1插入命令 (45)4.2.2插入对象(面、轴) (45)4.2.4插入在线仓库 (48)4.2.5插入文件 (49)4.2.6抽壳 (49)4.3DesignSpark Mechanical标注尺寸 (49)4.3.1标注尺寸界面 (49)4.3.2尺寸的标注和修改 (50)4.3.3测量 (51)4.4DesignSpark Mechanical显示样式 (51)4.4.1显示样式 (51)4.4.2图形样式 (51)4.4.3窗口样式 (52)4.4.4栅格样式 (53)4.4.4显示选项 (54)4.5DesignSpark Mechanical材料清单 (54)4.5.1插入材料清单 (54)4.5.2材料清单样式 (55)4.5.2材料清单属性 (55)第五章DesignSpark Mechanical三维建模实例 (56)5.1DesignSpark Mechanical三维建模实例——拉动(一) (56)5.2DesignSpark Mechanical三维建模实例——扫掠拉动(二) (60)5.3DesignSpark Mechanical三维建模实例——阵列移动(三) (64)5.4DesignSpark Mechanical三维建模实例——简单的实物建模(四) (68)5.5DesignSpark Mechanical三维建模实例——笔筒建模(五) (70)5.6DesignSpark Mechanical三维建模实例——笔筒装配(六) (73)第一章DesignSpark Mechanical的基础准备1.1DesignSpark Mechanical软件的安装及启动1.1.1安装包下载在DesignSpark官方网站提供DSM软件包的免费下载只需要在DesignSpark官网上成为注册用户,就可以免费激活使用软件下载地址:/designspark/electronics/chn/page/mechanical1.1.2软件的安装官方网站上已有详细的教程,这里不再赘述,网址:/designspark/electronics/chn/tutorial/designspark-mechanical-download-installation-and-activation1.1.3软件的启动安装完成后,双击桌面上的快捷方式,启动软件,进入起始界面,弹出了一个欢迎窗口。
最好的入门级SystemC基础知识简明教程
System C基本语法作者:胡玲娜张小军邓鸿威摘要:随着VLSI的集成度越来越高,设计也越趋复杂。
传统的设计方法如原理图输入、HDL语言描述在进行复杂系统设计时,设计效率往往比较低。
特别是在算法由软件转化为硬件的环节上,传统的设计方法的效率不是很高,设计者往往要耗费大量的时间和精力手工进行算法的转化。
为解决这些问题,一种新的系统级的设计方法SYSTEM C 被提出。
SYSTEM C是一种方法,也是一个C++库,用SYSTEM C可以很方便地实现一个软件算法的硬件实现,以及完成一个系统级的设计。
关键词: System C;硬件描述语言;FPGA一、概述随着VLSI的集成度越来越高,设计也越趋复杂。
一个系统的设计往往不仅需要硬件设计人员的参与,也需要有软件设计人员的参与。
软件设计人员与硬件设计人员之间的相互协调就变的格外重要,它直接关系到工作的效率以及整个系统设计的成败。
传统的设计方法没有使软件设计工作与硬件设计工作协调一致,而是将两者的工作割裂开来。
软件算法的设计人员在系统设计后期不能为硬件设计人员的设计提供任何的帮助。
同时现在有些大规模集成电路设计中往往带有DSP Core或其它CPU Core。
这些都使得单纯地用原理图或硬件描述语言来设计、仿真这么复杂的系统变得十分困难。
System C就是在这些矛盾的背景下提出的。
它的出现为复杂的系统设计提供了一条有效的解决途径。
System C 是由 Synospy Inc. 提出的,目前最新的版本为V2.0。
它提出的目的就是以一种系统设计的思想进行系统设计。
它将软件算法与硬件实现很好的结合在一起,提高了整个系统设计的效率和正确性。
System C 是一个C++ 库,也是一种使设计者可以有效地设计出一个软件算法的准确循环模型,硬件结构以及系统级设计的方法。
设计者可以用System C开发工具或在标准C++开发工具中加如System C库制作系统级模型,快速地仿真和优化设计,以及研究不同的算法,并且为硬件和软件设计人员提供一个设计系统的可执行规范。