实验四 系统的稳定性
新教材-选择性必修2:3-5 生态系统的稳定性
拓展
1.“干扰”是指破坏稳定状态的外界因素;“保持”是指与干扰同时 表现的系统内在的自动调节能力。
2.“破坏”是指受外界干扰因素影响,生态系统较远地偏离了原来的 稳定范围;“恢复”是指外界干扰因素消除后,生态系统重新建立起相对 稳定的状态。
3.热带雨林大都具有很强的抵抗力稳定性,因为热带雨林的物种组成 十分丰富,结构比较复杂;然而,热带雨林在受到一定强度的破坏后,也 能较快地恢复。相反,对于极地冻原(苔原),由于其物种组分单一、结构 简单,它的抵抗力稳定性很低,在遭到过度干扰后,恢复的时间也十分漫 长。因此,直接将抵抗力稳定性与恢复力稳定性进行比较,这种分析本身 可能就不合适。如果要对一个生态系统稳定性的两个方面进行说明,则必 须强调系统所处的环境条件。环境条件好,生态系统的恢复力稳定性较 高,反之亦然。
B.在森林中引入一些珍稀野生动物,使食物网更复杂
C.定期清理森林中的枯枝落叶,以利于种子萌发和幼苗的生长
D.在森林中引种一些珍稀野生植物,增大流入该生态系统的总能量
解题分析 引入外来物种不慎可能会导致生物入侵,这不仅不能维持
恢复力稳定性
核心
抵抗干扰,保持原状
遭到破坏,恢复原状
一般来说,生态系统的组分越多,食 生态系统在受到不同的干扰
特点 物网越 06 __复__杂__,自我调节能力就 (破坏)后,其恢复速度和恢复
07 __越__强__,抵抗力稳定性就越高 时间不同
(1)不同生态系统在这两种稳定性的表现上有一定的差别
联系 (2)两者是同时存在于同一系统中的两种截然不同的能力,它们相互
定性。
知识点一 生态平衡与生态系统的稳定性 1.生态平衡 (1)概念:生态系统的 01 ___结__构__和__功__能____处于相对稳定的一种状态。 (2)特征 ①结构平衡:生态系统的 02 __各__组__分___保持相对稳定。 ②功能平衡: 03 _____生__产__—__消__费__—__分__解_____的生态过程正常进行,保 证了物质总在循环,能量不断流动,生物个体持续发展和更新。 ③ 04 _收__支___平衡,例如,在某生态系统中,植物在一定时间内制造的 可供其他生物利用的有机物的量,处于比较稳定的状态。
机械工程控制理论基础 实验报告 附小结与心得

《机械控制理论基础》——实验报告班级:学号:姓名:目录实验内容实验一一阶环节的阶跃响应及时间参数的影响P3 实验二二阶环节的阶跃响应及时间参数的影响P9 实验三典型环节的频率特性实验P15 实验四机电控制系统的校正P20 实验心得…………………………………………P23实验一 一阶环节的阶跃响应及时间参数的影响● 实验目的通过实验加深理解如何将一个复杂的机电系统传递函数看做由一些典型环节组合而成,并且使用运算放大器来实现各典型环节,用模拟电路来替代机电系统,理解时间响应、阶跃响应函数的概念以及时间响应的组成,掌握时域分析基本方法 。
● 实验原理使用教学模拟机上的运算放大器,分别搭接一阶环节,改变时间常数T ,记录下两次不同时间常数T 的阶跃响应曲线,进行比较(可参考下图:典型一阶系统的单位阶跃响应曲线)。
典型一阶环节的传递函数:G (S )=K (1+1/TS ) 其中: RC T = 12/R R K =典型一阶环节的单位阶跃响应曲线:● 实验方法与步骤1)启动计算机,在桌面双击“Cybernation_A.exe ”图标运行软件,阅览使用指南。
2)检查USB 线是否连接好,电路的输入U1接A/D 、D/A 卡的DA1输出,电路的输出U2接A/D 、D/A 卡的AD1输入。
检查无误后接通电源。
3)在实验项目下拉框中选中本次实验,点击按钮,参数设置要与实验系统参数一致,设置好参数按确定按钮,此时如无警告对话框出现表示通信正常,如出现警告表示通信不正常,找出原因使通信正常后才可继续进行实验。
● 实验内容1、选择一阶惯性环节进行实验操作由于一阶惯性环节更具有典型性,进行实验时效果更加明显。
惯性环节的传递函数及其模拟电路与实验曲线如图1-1: G (S )= - K/TS+1RC T = 12/R R K =2、(1)按照电子电路原理图,进行电路搭建,并进行调试,得到默认实验曲线图1-2图1-2(2)设定参数:方波响应曲线(K=1 ;T=0.1s )、(K=2;T=1s ),R1=100k Ω 3、改变系统参数T 、K (至少二次),观察系统时间响应曲线的变化。
人教版 选择性必修二 生态系统的稳定性 教案

第5节生态系统的稳定性生态平衡——————————————自主梳理——————————————1.概念生态系统的组成成分和营养结构生态系统的结构和功能处于相对稳定的一种状态,就是生态平衡。
能量流动、物质循环和信息传递2.特征(1)结构平衡:生态系统的各组分保持相对稳定。
(2)功能平衡:生产-消费-分解的生态过程正常进行,保证了物质总在循环,能量不断流动,生物个体持续发展和更新(3)收支平衡:植物在一定时间内制造的可供其他生物利用的有机物的量,处于比较稳定的状态。
3.负反馈调节(1)概念:在一个系统中,系统工作的效果,反过来又作为信息调节该系统的工作,并且使系统工作的效果减弱或受到限制,它可使系统保持稳定。
(2)实例:(3)意义:负反馈调节在生态系统中普遍存在,它是生态系统具备自我调节能力的基础。
(1)生态系统的结构和功能处于相对稳定的一种状态,就是生态平衡。
(√)(2)处于生态平衡的生态系统具有结构平衡、功能平衡和信息平衡三大特征。
(×)提示处于生态平衡的生态系统具有结构平衡、功能平衡和收支平衡三大特征。
(3)正反馈调节在生态系统中普遍存在,它是生态系统具备自我调节能力的基础。
(×)提示负反馈调节在生态系统中普遍存在,它是生态系统具备自我调节能力的基础。
(4)当农田里蚜虫数量增多时,七星瓢虫的数量也会增多,这样蚜虫种群数量的增长就会受到抑制,这属于生态系统内的负反馈调节。
(√)(5)甲状腺激素分泌的调节也存在着负反馈调节。
(√)[应用示例](2021·山东潍坊调研)下列关于生态平衡和生态系统的稳定性的叙述,正确的是()A.处于生态平衡的生态系统不一定结构平衡B.生态平衡意味着生态系统中各种生物的数量恒定不变C.生态平衡被破坏的原因是恶劣的自然条件D.生态系统的自我调节能力是有限的答案 D解析处于生态平衡的生态系统结构平衡、功能平衡、收支平衡,A错误;生态平衡是一种动态的平衡,各种生物的数量不是恒定不变的,B错误;生态平衡被破坏的原因除了恶劣的自然条件,还有人为的破坏等,C错误;生态系统的自我调节能力是有限的,D正确。
控制工程基础实验指导书(答案) 2讲解
实验二二阶系统的瞬态响应分析一、实验目的1、熟悉二阶模拟系统的组成。
2、研究二阶系统分别工作在ξ=1,0<ξ<1,和ξ> 1三种状态下的单位阶跃响应。
3、分析增益K对二阶系统单位阶跃响应的超调量σP、峰值时间tp和调整时间ts。
4、研究系统在不同K值时对斜坡输入的稳态跟踪误差。
5、学会使用Matlab软件来仿真二阶系统,并观察结果。
二、实验仪器1、控制理论电子模拟实验箱一台;2、超低频慢扫描数字存储示波器一台;3、数字万用表一只;4、各种长度联接导线。
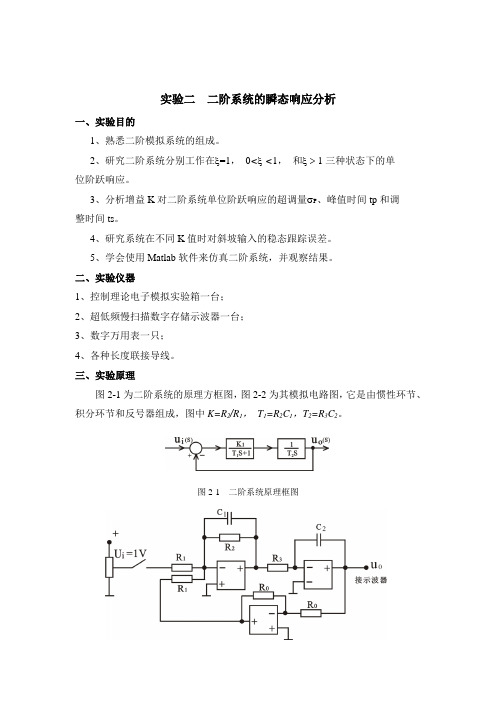
三、实验原理图2-1为二阶系统的原理方框图,图2-2为其模拟电路图,它是由惯性环节、积分环节和反号器组成,图中K=R2/R1,T1=R2C1,T2=R3C2。
图2-1 二阶系统原理框图图2-1 二阶系统的模拟电路由图2-2求得二阶系统的闭环传递函1222122112/() (1)()/O i K TT U S K U S TT S T S K S T S K TT ==++++ :而二阶系统标准传递函数为(1)(2), 对比式和式得n ωξ==12 T 0.2 , T 0.5 , n S S ωξ====若令则。
调节开环增益K 值,不仅能改变系统无阻尼自然振荡频率ωn 和ξ的值,可以得到过阻尼(ξ>1)、临界阻尼(ξ=1)和欠阻尼(ξ<1)三种情况下的阶跃响应曲线。
(1)当K >0.625, 0 < ξ < 1,系统处在欠阻尼状态,它的单位阶跃响应表达式为:图2-3 0 < ξ < 1时的阶跃响应曲线(2)当K =0.625时,ξ=1,系统处在临界阻尼状态,它的单位阶跃响应表达式为:如图2-4为二阶系统工作临界阻尼时的单位响应曲线。
(2) +2+=222nn nS S )S (G ωξωω1()1sin( 2-3n to d d u t t tgξωωωω--=+=式中图为二阶系统在欠阻尼状态下的单位阶跃响应曲线etn o n t t u ωω-+-=)1(1)(图2-4 ξ=1时的阶跃响应曲线(3)当K < 0.625时,ξ> 1,系统工作在过阻尼状态,它的单位阶跃响应曲线和临界阻尼时的单位阶跃响应一样为单调的指数上升曲线,但后者的上升速度比前者缓慢。
新教材高中生物第3章生态系统及其稳定性第5节生态系统的稳定性课件新人教版选择性必修2
2.一个生态系统的平衡遭到破坏,合理的解释是( ) A.这个生态系统没有自我调节能力 B.这个生态系统的自我调节能力一定很弱 C.这个生态系统的动植物种类一定很少 D.外界干扰因素的强度超过了这个生态系统的自我调节能力 答案:D
解析:一般情况下,生态系统中各种生物的数量及所占的比例 总是维持在相对稳定的状态,即生态平衡,这说明生态系统具 有自我调节能力,但这种调节能力是有限的。当外界干扰因 素的强度超过了这个生态系统的自我调节能力,生态系统的 平衡就会遭到破坏。
三、提高生态系统的稳定性 1.必要性 (1)处于生态平衡的生态系统可以持续不断地满足 人类生 活所需 ,如粮油、蔬果、肉蛋奶、木材等农副产品。 (2)处于生态平衡中的生态系统能够使人类生活与生产的 环境 保持稳定。
2.措施 (1)控制对生态系统的 干扰程度 ,在不超过生态系统自 我调节能力的范围内,合理适度地利用生态系统。 (2)对人类利用强度较大的生态系统,应给予相应的 物质 、 能量 的投入,保证生态系统内部结构与功能的协调。例如, 为使单一作物的农田生态系统保持稳定,需要不断施肥、灌 溉、控制病虫害;还可以人工建造“ 生态屏障 ”。
微思考2应将生态缸放置于室内通风、光线良好的地方,但 要避免阳光直接照射,请分析其原因。
提示:既能使生态缸得到良好的光照,又可避免阳光直接照 射导致生态缸内温度过高。
一 生态系统的稳定性
重难归纳 1.自我调节能力的大小 一般来说,生态系统的组分越多,食物网越复杂,其自我调节 能力就越强,反之则越弱。 2.生态系统的负反馈调节 (1)概念:负反馈是指在一个系统中,系统工作的效果, 反过来又作为信息调节该系统的工作,并且使系统工作的效 果减弱或受到限制,它可使系统保持稳定。
(2)作用:负反馈调节在生态系统中普遍存在,它是生态系统 具备自我调节能力的基础。
成都理工大学信号与系统实验报告材料
信号与系统实验报告姓名:学号:学院:班级:指导老师:时间:实验一MATLAB一、实验性质验证性实验二、实验目的1、掌握MATLAB编程及绘图的基本知识;2、能表示在信号与系统中常用的连续及离散时间信号。
三、实验内容与步骤1、画出x(t)=cos(2*t)的波形,并判断x(t)是否为周期信号,若是周期信号,确定其周期。
同时画出cos(2*t)*u(t)的波形。
解、x(t)=cos(2*t)图形为:所以,是周期信号,周期是pi.x(t)=cos(2*t)*u(t)的波形为:2、画出X(n)=cos(2*n)的波形,并判断X(n)是否为周期信号,确定其周期若是周期信号,确定其周期。
解、X(n)=cos(2*n)的波形为:所以,是周期信号,周期是pi.3、画出(t-1)*u(t)的波形解、y=(t-1)*u(t)的波形为:4、产生单位脉冲序列,写出相应的程序并画出波形。
解、单位脉冲序列的程序δ(n-5)及u(n)的波形为;实验二线性非时变系统的时域分析一、实验性质验证性实验二、实验目的掌握在时域中对连续和离散时间线性时变系统响应进行分析的方法。
三、实验内容与步骤1、已知系统的微分方程如下,用MATLAB画出该系统的冲激响应及该系统在输入信号e(t)=e^-2u(t)时的零状态响应。
(改变取样的时间间隔P观察仿真的效果)解、①冲激响应:②零状态响应:时间间隔p=0.05时,波形图如下:时间间隔p=0.5时,波形图如下:2、已知离散系统的差分方程为:y(n)+y(n-1)+0.25y(n-2)=x(n)用MATLAB画出该系统的单位函数响应及单位阶跃响应的波形。
解、差分方程的程序单位函数响应:四、实验总结(1)在用matlab时,有些变量不用定义就能用,比较随意,感觉不太严谨。
(2)第二题的有个“单位函数响应”,是错误的。
(3)书上有些知识介绍的不全面,必须上网查资料才行。
实验四系统的零极点分析一、实验性质验证性实验二、实验目的1、掌握系统函数及零极点的概念;2、掌握对连续和离散系统的稳定性进行分析的方法。
基于MATLAB的控制工程实验研究
实验三是系统的频率 响应分析 , 要求学生掌握 系统 的频率
响应 曲线 、 系统 的 B d 、 y u t oe图 N q i 图的特点 、 s 绘制及 分析 , 理
解 闭环频 率特 性与 时域 性 能之 间 的关 系 ,掌握 利 用 M T A— L BSm l k进行频域 特性分析 的方法 ; A /i u n i
实验五是控制系统的校正及 PD控制器仿真。 I 要求学生熟 悉超前、 滞后和超前 一 滞后 网络的特性。理解基于频率 法进行 串联校正的基本概念 , 掌握基于频率法进行超前 、 滞后和超前
一
滞后校正 的方法 。了解控制系统 的设计和校正原理 , 给定原
系统 , 能分析出系统参数 , 设计 串联校正装 置, 系统满足一定 使 性能指标 , 观察校正前后 系统 动态特性 的变化 , 了解 校正装 置
门重 要专业基础课程 , 特点是理论性强以及相对抽象 , 其 以致
使得 学生难于理解 ,需要借助实验加深对课程学 习内容 的理
阶系统的脉冲响应 、 阶跃 响应 、 斜坡响应 。 要求学生掌握系统 的 时域特性 , 系统 的时 间常数 、 理解 频率 、 阻尼等主要参数对系统 时域特性的影响 , 掌握使用 MA L BSmdn 进行时域特性分 T A /i tik
握 M T A /i l k的基 本使用方法 ,了解应 用 Sm l k进 A L BSmun i i ui n 行 控 制 系统 建 模 、 仿 真 、分 析 的 过 程 ,掌握 基 于 MA . T
参数设计 , 掌握利用 S l k建模 、 i i mu n 仿真 、 分析 的方法。
2 实验 的特 色及具体 实现 方法
(. 1广西大学实验设备处 , 广西 南 宁 5 0 0 ;. 3 04 2广西大学机械工程学院 , 广西 南 宁 5 0 0 ) 30 4
网络化系统的稳定性分析、控制及滤波的开题报告
网络化系统的稳定性分析、控制及滤波的开题报告一、选题背景网络化系统是一种集成了物理、计算和通信的系统,其应用范围广泛,涉及工业控制、交通运输、能源与环境等众多领域。
随着网络化系统规模的不断扩大,稳定性问题愈加突出,因此对网络化系统的稳定性分析、控制及滤波具有重要意义。
二、研究现状网络化系统的稳定性分析、控制及滤波已经成为研究的热点。
现有的研究成果主要分为下列几方面:1.稳定性分析稳定性分析是研究网络化系统稳定性的基础。
现有的方法主要包括Lyapunov稳定性分析法、Passivity分析法等。
这些方法主要是通过分析系统行为,找到系统的稳定性条件。
2.控制控制是维持网络化系统稳定运行的关键。
目前,研究网络化系统控制的主要方法包括传统PID控制、模糊控制、神经网络控制等。
这些方法主要通过对系统动态行为进行控制,实现系统的稳定、可控和可观。
3.滤波滤波是网络化系统中信号处理的必要环节。
常用的滤波方法主要包括FIR滤波、IIR滤波、小波变换等。
这些方法可以实现对系统输入信号的预处理,有效提高系统精度和鲁棒性。
三、研究内容1.网络化系统稳定性分析通过分析网络化系统中的数据流、时延、拓扑结构等特性,建立系统数学模型,基于Lyapunov稳定性分析法、Passivity分析法等方法,分析系统的稳定性,并寻找优化稳定性的控制策略。
2.网络化系统控制针对网络化系统中存在的时延、通信不可靠等问题,提出一种基于模糊PID控制的控制策略。
控制器采用模糊方法,将PID控制器所需的参数设置为模糊变量,通过模糊推理实现控制器参数的在线优化。
3.网络化系统滤波结合网络化系统中信号处理中的实际需求,通过小波变换等方法,对数据信号进行处理优化,提高网络化系统的精度和鲁棒性。
四、研究意义本研究的意义在于:1.研究网络化系统稳定性问题,提出符合实际应用场景的控制策略,保证系统的可靠稳定运行。
2.研究网络化系统的滤波方法,实现对数据的处理和优化,提高网络化系统的精度和鲁棒性。
第9单元 第8课时 生态系统的稳定性
第8课时生态系统的稳定性课标要求 1.解释生态系统具有保持或恢复自身结构和功能相对稳定,并维持动态平衡的能力。
2.举例说明生态系统的稳定性会受到自然或人为因素的影响,如气候变化、自然事件、人类活动或外来物种入侵等。
3.阐明生态系统在受到一定限度的外来干扰时,能够通过自我调节维持稳定。
考点一生态系统的稳定性1.生态平衡与生态系统的稳定性(1)生态平衡(2)生态系统的稳定性2.生态系统稳定性的类型项目抵抗力稳定性恢复力稳定性区别实质保持自身结构与功能相对稳定恢复自身结构与功能相对稳定核心抵抗干扰,保持原状遭到破坏,恢复原状影响因素生态系统中物种丰富度越大,营养结构越复杂,抵抗力稳定性越强生态系统中物种丰富度越小,营养结构越简单,恢复力稳定性越强二者联系①相反关系:抵抗力稳定性强的生态系统,恢复力稳定性弱,反之亦然;②二者是同时存在于同一系统中的两种截然不同的作用力,它们相互作用,共同维持生态系统的稳定。
如图所示:注意特例:冻原、沙漠等生态系统的两种稳定性都比较低。
易错提醒(1)抵抗力稳定性、恢复力稳定性和总稳定性的关系(2)生态系统稳定性的4个易混点①生态系统的稳定性主要与生物种类有关,还要考虑生物的个体数量。
食物链数量越多越稳定,若食物链数量相同,再看生产者,生产者多的稳定程度高。
②生态系统的稳定性不是恒定不变的,因为生态系统的自我调节能力具有一定的限度。
③强调“生态系统稳定性高低”时,必须明确是抵抗力稳定性还是恢复力稳定性,因为二者一般呈负相关。
④抵抗力稳定性和恢复力稳定性的辨析:某一生态系统在受到外界干扰,遭到一定程度的破坏而恢复的过程,应视为抵抗力稳定性,如河流轻度污染的净化;若遭到彻底破坏,则其恢复过程应视为恢复力稳定性,如火灾后草原的恢复等。
3.提高生态系统稳定性的措施(1)控制对生态系统的干扰强度,在不超过生态系统自我调节能力的范围内,合理适度地利用生态系统。
(2)对人类利用强度较大的生态系统,应给予相应的物质、能量的投入,保证生态系统内部结构与功能的协调。
2.3.3 生态系统的稳定性 学案(含答案)
2.3.3 生态系统的稳定性学案(含答案)第三节第三节生态系统的稳定性生态系统的稳定性情景导入课标导航课程标准1.了解生态系统稳定性概念,明确生态系统稳定性与结构复杂性的关系。
2.理解生态系统的抵抗力和恢复力关系,以及生态系统的稳定性阈值。
3.设计并制作生态缸,观察其稳定性。
关键术语生态系统的稳定性抵抗力.恢复力生态系统的稳定性阈值生态系统的稳定性基础梳理1概念生态系统发展到一定阶段的产物,或者说生态系统发展到成熟稳定状态时而具有的一种自稳能力。
2影响生态系统稳定性原因1结构复杂,物种多样性高“高”或“低”,种间相互作用多而密切,其环境条件相对稳定,可预测性强“强”或“差”,抵抗干扰能力强“强”或“差”。
2结构简单,物种多样性低“高”或“低”,种间相互作用少“多”或“少”,其环境条件多变而难以预测,抵抗干扰能力差“强”或“差”。
3生态系统稳定性的类型包括抵抗力和恢复力两个方面,它们之间关系并非正相关,而是相互排斥的。
4生态系统的稳定性阈值1概念生态系统对外界干扰的抵抗都有一定的限度或阈值,即生态系统存在着一个稳定性阈值。
2影响因素取决于生态系统的成熟程度,与抵抗力相一致,抵抗力越高,阈值也越高;抵抗力越低,稳定性阈值也就越低。
思维激活森林生态系统的稳定性高于草原生态系统的稳定性,对吗提示不对。
森林生态系统的抵抗力高于草原生态系统,而恢复力低于草原生态系统。
合作探究1稳定性的表现1结构相对稳定动植物种类及数量保持相对稳定。
2功能相对稳定物质和能量的输入.输出相对平衡。
2稳定性的基础负反馈调节1作用是生态系统自我调节能力的基础,能使生态系统达到和保持平衡及稳态。
2结果抑制或减弱最初发生变化的那种成分所发生的变化。
3存在范围负反馈调节不仅存在于生物群落内部,而且存在于生物群落与无机环境之间。
4实例一个草原生态系统中的负反馈调节,如图所示。
特别提醒生态系统的自我调节能力不是无限的。
当外界干扰因素的强度超过一定限度时,生态系统的自我调节能力会迅速丧失。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四 系统的稳定性
一、实验所用仪器及设备
1、EFTA/Z型自控模拟试验仪
2、JC2000系列存储示波器
3、信号发生器
4、稳压电源
二、实验原理及说明
由対数判据可知,根据系统的开环传递函数可判定闭环系统的稳定。本实验将
测试系统的开环bode图,并判断闭环系统的稳定,并与闭环系统的阶跃响应相
比较,验证对数判据。
三、实验结构图
W p 1111pT z 1211pT 11pT X
(a)
W P 4114pT 1111pT X
(b)
W P 4114pT 1111pT 1211pT X
(c)
四、实验步骤
1、将给出的各模版参数测量出来;
(1) p、pT11、PT12的测量方法参照实验二
(2) PT4的测量方法如下:
首先由示波器得到阶跃响应的图形如下
其中,按照TuTa=3.13的关系画出如图所示的切线,在根据463.4TbTa或者
425.1
T
Tu
可以求出PT4的时间常数T4。
h(t)
w
2、按照图b搭建系统
(1)测试开环的频率响应,将相应的数据记录下来;
(2)调节信号发生器的输入信号为1v,测量闭环系统的阶跃响应,观察闭环系统
是否稳定;
(3)调节P环节,使闭环系统达到临界稳定,测出此时的Kp1值。
3、采用调好的临界值Kp1,根据图c再串联一个PT12环节,测试图c闭环系统
的阶跃响应,观察系统是否稳定。调节p环节使其临界稳定,测试此时的KP2
值。
4、采用已经调出的KP2值,然后测试图c的开环频率特性,将相应的实验数据
记录下来。
五、实验报告及要求
1.根据测量,写出PT4,PT11,PT12的时间常数;
2.计算使图b所示闭环系统临界稳定的kp值,并与所测得kp1相比较;
3.根据步骤二所记录的数据,画出图b的bode图,然后有奈氏判据判断闭环系
统的稳定性,并与闭环阶跃相比较;
4.计算使图c所示闭环系统临界稳定的kp值,并与所测得kp2相比较;
5.根据步骤四所记录的数据,画出图c的bode图,然后有奈氏判据判断闭环系
统的稳定性,并与闭环阶跃相比较;
w 0.1 0.2 0.5 1 2 5 10
f 0.0159 0.0318 0.0796 0.159 0.318 0.796 1.592
ΔT(s)
1 1 1 0.6 0.5 0.4 0.32
¢(w)
测
-5.73 -11.48 -28.65 -34.83 -57.30
-114.60 -183.35
L(w) -0.92 -0.92 -0.92 -1.4 -1.9 -8.0 -16.0
w
0.1 0.2 0.5 1 2 5 10
f
0.0159 0.0318 0.0796 0.159 0.318 0.796 1.592
ΔT(s)
2 2 2 0.65 0.6 0.56 0.42
¢(w)测
-11.46 -22.92 -29.34 -37.24 -68.75 -160.43 -240.64
L(w) 3.306 3.306 3.306 3.306 3.089 2.408 0.310