基于BP神经网络的船舶航迹控制技术_郭文刚
BP神经网络在船舶与海洋工程中的应用研究
BP神经网络在船舶与海洋工程中的应用研究
高明正;张火明;金尚忠
【期刊名称】《舰船科学技术》
【年(卷),期】2008(030)001
【摘要】人工神经网络作为一个具有高度非线性映射能力的计算模型,在工程中具有广泛的应用前景.在数值预测方面,它不需要预选确定样本的数学模型.仅通过学习样本数据即可以进行预测.介绍了BP神经网络,并针对实际应用中收敛速度慢,平台效应等问题对网络进行了优化,给出了改进的三层BP神经网络算法.最后结合船舶与海洋工程的一些实际问题.探讨了利用改进的BP神经网络进行数值预测的方法和应该注意的问题,并给出了一些有益的建议.实验表明,神经网络的预测精度在船舶与海洋工程是可以接受的.
【总页数】8页(P34-40,44)
【作者】高明正;张火明;金尚忠
【作者单位】中国计量学院信息工程学院,浙江,杭州,310018;中国计量学院信息工程学院,浙江,杭州,310018;中国计量学院信息工程学院,浙江,杭州,310018
【正文语种】中文
【中图分类】U661.3
【相关文献】
1.改进的BP神经网络在船舶与海洋工程中的应用研究 [J], 张火明;孙志林;高明正
2.PCA算法在银屑病BP神经网络建模中的应用研究 [J], 詹秀菊
3.BP神经网络在跨既有线高速铁路桥梁施工安全风险评估中应用研究 [J], 刘冬冰
4.改进的BP神经网络在车辆目标识别中的应用研究 [J], 刘路
5.人工蜂群算法+BP神经网络模型在短期电力负荷预测中的应用研究 [J], 王天力因版权原因,仅展示原文概要,查看原文内容请购买。
基于BP网络的船舶磁性目标定位方法研究

0 引 言
海上目标船舶定位方法主要有 3 类:一是基于视 频信号;二是基于水声信号;三是磁性目标定位方 法。前 2 种方法系统部署复杂,较易受到海上复杂环 境的影响,经济性较差。 船舶磁性目标定位方法是海上目标定位系统最经 济有效的方法,但计算量较大,算法模型易陷入局部 最优解 [1],需要进行优化。 本文利用神经网络算法对船舶磁性目标定位目标 函数进行求解,最后对算法进行仿真,分析了仿真结果。
摘 要 : 船舶磁性目标定位是海上目标定位系统中重要的方法之一,优点是部署简单、定位精度较高;缺点
是定位算法复杂度较高、计算量大,算法较易陷入局部最优解,需要进行改进。神经网络是解决目标最优问题的有 效求解手段,利用各神经元权值系数调整能够计算出磁性目标定位的全局最优解。本文研究船舶磁性目标定位的算 法结构,针对目标函数,设计基于 BP 神经网络的定位算法,最后给出基于神经网络算法仿真结果,并与传统算法 进行对比。
第 39 卷 第 12A 期 2017 年 12 月
舰 船 科 学 技 术 SHIP SCIENCE AND TECHNOLOGY
பைடு நூலகம்
Vol. 39, No. 12A Dec. , 2017
基于 BP 网络的船舶磁性目标定位方法研究
肖 军
(大连东软信息学院,辽宁大连 116032)
度数据采集,当某传感器在区域采集的最大磁场变化 幅值大于设定的阀值 Bt1,认为传感器采集数据有效; 同时,在某区域数据有效的传感器数量大于阀值 Bt2, 可检测出目标物。 传感器分布如图 1 所示。图中所在区域部署 6 个 磁 场 传 感 器 , 两 两 距 离 大 于 1.5 m , 设 目 标 船 只 磁 矩
·
+
s1 (m) s2 (m) . . . sN (m)
基于BP神经网络的船舶自动舵自适应控制研究
智能制造数码世界 P .263fi done #exitecho `date +"%Y-%m-%d %H:%M:%S"` exit >> /auditd_restart.logexit 02.2.如何保护审计记录审计记录保存在本机显然是不安全的,审计记录可以被人为恶意删除或因设备故障丢失,在安全事件发生后,没有日志记录很难找到事件原因。
因此我们需要在系统中单独搭建日志服务器,将本机日志传送到日志服务器,在日志服务器中保存。
3.恶意代码防护恶意代码防护包括恶意入侵和病毒,在应用程序部署完成后应及时关闭不必要的服务和端口,安装病毒查杀软件,启用入侵检测功能,保持系统补丁和病毒库及时更新。
3.1.是否必须安装杀毒软件安装杀毒软件可能会造成系统性能下降,并引发其他位置风险,顾对于核心业务服务器酌情处理,如未安装则应避免通过USB 及光驱等设备直接拷贝文件,在安全域边界处应采用防毒墙对恶意代码进行查杀。
如果安装杀毒软件则应在系统内部部署恶意代码升级服务器,通过升级服务器保持客户端恶意代码库的更新。
建议系统防病毒网关与杀毒软件采用不同的恶意代码库。
3.2.是否必须对系统补丁进行更新系统补丁补丁与杀毒软件类似,系统补丁的更新会产生一定的潜在风险,建议在实验系统先行部署,如无异常,再进行生产系统部署。
3.3.入侵防护建议在系统边界处部署入侵防护设备,对系统的入侵防护进行整体考虑。
4.结束语因运行应用千差万别,顾服务器有着各自不同的安全需求,在对其进行安全加固时应从易用性、稳定性等多方面进行综合考虑,文中的加固方法并不适用于所有服务器,这里仅是起到抛砖引玉的作用,给服务器管理者提供一些安全加固的思路,文中不妥之处请读者加以指正。
参考文献[1]GB/T 22239-2008 信息安全技术 信息系统安全等级保护基本要求。
作者简介段垚(1980.2-),男,汉族,北京人,硕士,国家广播电视总局监管中心高级工程师,研究方向:广播电视信息安全。
基于神经网络的船舶动态定位与通信技术研究
基于神经网络的船舶动态定位与通信技术研究近年来,随着各国经济和科技的发展,海洋运输业获得了快速发展。
船舶定位和通信技术的发展成为了海洋运输业的关键支撑。
目前,基于神经网络的船舶动态定位和通信技术已经成为了一种热门的研究方向,本文将对这一领域进行深入探讨。
一、神经网络在船舶动态定位中的应用船舶动态定位是指根据不同环境、条件下的船舶状况进行动态位置的确定,并实时跟踪船舶,在运输安全和调度中发挥着重要作用。
神经网络技术是一种模拟神经元的计算方式。
利用神经网络算法,可以建立复杂的数学模型,从而实现对船舶动态定位的精确、实时计算。
1.1 神经网络模型建立神经网络模型是船舶动态定位中的核心,其所建立的模型会直接影响到船舶位置的精度和准确性。
目前,神经网络模型主要有三种建立方式:(1)基于BP神经网络的模型BP神经网络结构简单、容易理解,适用于多输入、单输出的动态定位问题。
它通过反向传播算法不断调整权值和偏置,训练网络整体误差,从而不断优化网络的预测精度。
(2)基于RBF神经网络的模型RBF是一种基于径向函数的神经网络,其具有快速收敛、可逆性等优点,适用于小样本数据集的定位问题。
RBF神经网络适合于逼近未知的多变函数并进行预测。
(3)基于FNN神经网络的模型FNN神经网络由多个BP网络组成,能够进行并行计算和预测,适用于大量数据和高精度的动态定位问题。
FNN神经网络需要较长的训练时间和更高的运算能力,但其预测精度更高,适用于复杂环境下的动态定位。
1.2 神经网络模型调参神经网络模型在实际应用中,需要通过调整各层之间节点数、权值、偏置项等参数,以达到更高的预测精度。
模型调参需要遵循以下原则:(1)模型中节点数过多或过少,均会导致模型预测精度下降。
(2)权值和偏置项的调整需要进行多次迭代,以达到更优参数。
(3)训练集和测试集需要充分考虑,以避免模型过拟合或欠拟合。
二、神经网络在船舶通信中的应用船舶通信指的是在摩擦剧烈的海面和复杂的海上环境中,船舶与其他船只或地面通信站之间进行信息交互。
基于改进BP神经网络的船舶轨迹识别方法

基于改进BP神经网络的船舶轨迹识别方法凡甲甲; 祁云嵩; 葛霓琳【期刊名称】《《计算机工程与设计》》【年(卷),期】2019(040)012【总页数】6页(P3639-3644)【关键词】轨迹识别; BP神经网络; 船舶自动识别系统; 附加动量; 自适应学习【作者】凡甲甲; 祁云嵩; 葛霓琳【作者单位】江苏科技大学计算机学院江苏镇江212000【正文语种】中文【中图分类】TP398.10 引言加强水上交通管理和监控,及时发现安全隐患并采取相应的措施,既是保证船舶安全航行、港口正常作业生产的迫切需要,也是防止各种违法海上活动、保护海洋环境的有效手段。
目前大多数研究是对船舶轨迹信息进行训练建立预测[1,2]或异常[3]模型,由于海上情况多变,船舶的行为预测和异常行为检测并不能有效处理海上未知的状况。
在前人研究的基础上,引入动量因子[4,5]和自适应学习速率[6,7]来优化BP神经网络[8]性能,能够较好地改善BP神经网络的易陷入局部最小值、收敛速度慢等缺点,最后将改进BP神经网络应用到船舶轨迹识别[9]问题中,与传统BP神经网络进行对比实验,达到了预期的识别效果。
1 AIS信息的采集与预处理1.1 AIS信息的采集船舶的AIS信息[10]的动态信息主要为坐标、航速、航向等,静态信息主要为船舶类型、长度、宽度以及吨位,动态信息体现了船舶的轨迹行为特征[11]。
为了区分不同船舶的轨迹,将船舶海上业务识别码(maritime mobile ser-vice identity,MMSI)加入行为表征数据中,船舶在行驶过程中不定时播报位置及速度信息存入数据接收服务器中,定时从服务器中取出所需的AIS信息报文文件。
船舶的AIS信息显示在系统界面中如图1所示。
图1 AIS信息列表1.2 AIS信息预处理采集到的AIS信息的数据庞大,有数据冗余性强、错误数据多等异常情况,对采集到的AIS数据进行预处理,删除MMSI为0,经纬度异常的AIS信息,对删除异常AIS数据后的船舶轨迹进行特征分析和特征点处理,目的是找出轨迹的航速、航向等代表轨迹线空间几何特征的显著快速变化的点,使得船舶特征轨迹不仅可以较大程度地还原原始轨迹,还能减少数据的计算量,如式(1)所示(1)其中,Δv为平均航速变化率,vt1, vt2为t1, t2相邻时刻船舶轨迹点的航速。
BP神经网络在船舶运动估计中的应用

中图分类号:
Ship motion estimation based on BP neural network
ZHANG Li ( Beijing Industrial Vocational and Technical College , Beijing 100042 , China) Abstract: Ship motion estimation plays an important role in ship safety ,energy saving. In this
[1 ]
X2
Xn神经网络结构 Three layer BP neural network architecture
文首先利用附加动量的弹性梯度下降法对传统的神 经网络进行改进, 弥补传统 BP 神经网络学习速度 慢的缺点; 然后给出一种基于 BP 神经网络的船舶 运动预测方法, 通过 BP 神经网络较强的计算与自 适应能力,实现对船舶动态信息的准确预测 。
收稿日期: 2016 - 03 - 14 作者简介: 张莉( 1982 - ) , 副教授, 研究方向为概率统计及应用数学 。 女, 硕士,
· 14·
舰
船
科
学
技
术 u( t) = u( t - 1 ) + Δu( t) , u ( t ) = K P e( t ) +
第 38 卷
计算时间长的缺点, 加快收敛速度。 该权值调整方 法如下: t + 1 时刻,权值 W( t + 1 ) 的调整公式为: W( t + 1 ) =
paper,a ship motion estimation method based on BP neural network was presented. BP neural network has strong self - learning and self adaptation ability ,the improved BP neural network model was applied to ship motion estimation,which could accurately predict the dynamic information of the ship. Key words: ship motion estimation; BP neural network ; additional momentum 的多层前馈网络。Robert Hecht - Nielson 证明 3 层的 BP 神经网络能够有效逼近任意连输函数[2]。3 层神 经网络的基本结构如图 1 所示。
基于BP神经网络的船舶航迹控制技术
基于BP神经网络的船舶航迹控制技术随着船舶制造水平的提高和海洋科技的不断发展,船舶行驶越来越普遍。
在无人驾驶的趋势下,对于船舶航迹控制技术的需求也越发强烈。
基于BP神经网络的船舶航迹控制技术是一种高效、准确的控制方法。
BP神经网络由输入层、中间层和输出层构成。
输入层接收外部信息,通过传递到中间层进行信息处理,最终输出结果。
BP神经网络的训练是通过反向传播算法进行的,即根据输出和实际误差逐层逆向调整各层节点的权值。
在船舶控制中,BP神经网络的输入层可以接收各种传感器测得的水平、垂直方向的速度、角度以及海流等船舶运动状态量;输出层则输出需要调整的舵角等控制量。
在船舶控制方面,BP神经网络的优势在于其能够适应不确定、非线性等复杂系统特性,具有较好的泛化能力,并且具有自适应调整能力。
此外,BP神经网络的训练也非常方便,可以利用历史数据进行训练,减少了对实时控制系统的干扰。
航迹控制过程中,BP神经网络可以根据船舶状态和外部环境实时更新信息,进行快速、准确的控制输出,从而实现预期航迹的维持。
当然,BP神经网络也存在一些问题。
首先,训练过程需要大量的数据,需要有足够的历史数据进行事先编程。
其次,在实际控制过程中,如果船舶状态发生急剧变化,BP神经网络可能需要时间来适应新的船舶状态,导致控制延迟。
此外,BP神经网络的结构也需要根据实际情况进行设计和调试,过于复杂的设计可能导致训练成本过高,实时控制效果不佳。
综上所述,基于BP神经网络的船舶航迹控制技术仍然是未来发展的方向。
作为智能船舶技术的重要组成部分,BP神经网络控制技术具有非常广阔的应用前景和市场空间。
当然,在实际应用过程中,需要特别注意与其他控制系统的配合、调试和优化,以实现更加可靠、稳定的自动船舶控制。
相关数据可以是任何与船舶航迹控制相关的数据,例如海浪、气象、船舶运行状态等。
在这里,我们可以列举以下几类数据并进行简单的分析。
1. 海浪数据:海浪数据是影响船舶运行的重要因素之一。
BP神经网络和PID船舶自动舵控制方法
0 引 言
船舶自动舵是船舶航行的主要控制设备,在船舶 自动舵的工作过程中,由于多种因素综合影响,使得 船舶自动舵是一个复杂非线性系统,具有强烈的时变 特性,使得其精确控制面临巨大的挑战[1]。
第 41 卷 第 8A 期 2019 年 8 月
舰船科学技术 SHIP SCIENCE AND TECHNOLOGY
Vol. 41络和 PID 船舶自动舵控制方法
张静文,张庆松 (重庆科创职业学院,重庆 402160)
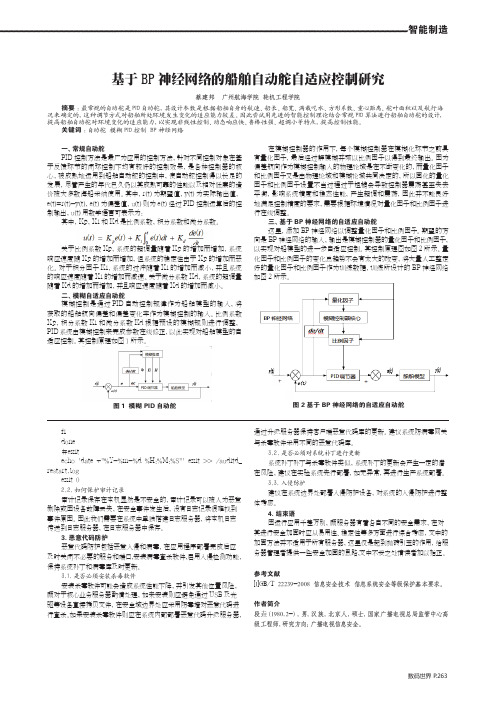
摘 要: 船舶自动舵控制十分复杂,再加其它因素的干扰,使得单一神经网络或者 PID 控制无法对船舶自动 舵进行高精度控制,而且船舶自动舵控制速度慢,为了改善船舶自动舵控制效果,利用 BP 神经网络和 PID 控制的 优点,设计了 BP 神经网络和 PID 相融合的船舶自动舵控制方法。首先分析船舶自动舵控制原理,然后初始化 PID 参数的范围,并采用 BP 神经网络获取 PID 控制器的 3 个参数最优值,从而实现船舶自动舵控制,最后在 Matlab 平台实现了的船舶自动舵控制仿真模拟实验。结果表明,本文方法可以对船舶自动舵变化趋势进行很好的跟踪 和控制,获得了高精度的船舶自动舵控制结果,而且船舶自动舵控制速度快,能够适合船舶自动舵的实时性变化特 性,具有较强的抗干扰能力,具有一定的推广价值。
ZHANG Jing-wen, ZHANG Qing-song (Chongqing Creation Vocational College, Chongqing 402160, China)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
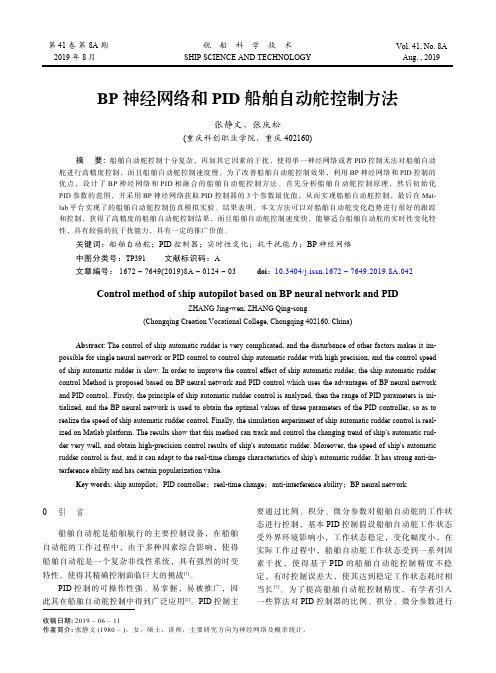
图1 Fig. 1
BP 神经网络的示意图
Diagram of the BP neural network
正向传播和反向传播组成 BP 神经网络的算法 学习过程。在正向传播过程中, 网络信息从输入层 经过隐含层, 逐层处理, 最后传向输出层。 在传输 过程中,每层神经基本单位的状态只影响下一层基 本单位的状态。如果在输出层不能得到期望的输出 结果,那就转入反向传播, 系统误差信号将沿原来
当 β 的 值 趋 于 无 穷 时, 激 发 函 数 趋 于 阶 跃 函 数 , 设定 β 的取值 为 1 。 将 β = 1 代 入 式 ( 3 ) 求 导 可得 : f ,( net i ) = f( net i) [ 1 - f( net i ) ] 。 ( 4) 通过加权系数 W ki , 第 i 个节点的输出向前传 播到第 k 神经元 , 并作为第 k 神经元的输入之一 , 输出层的第 k 个神经单位 ( 神 经 元 ) 的 总 输 入 个 数为 :
2 ) 船舶在直线段航迹状态, 即图 2 中 2 - > 3 路线,此时,船舶的航迹应按要求精度保持; 3 ) 航迹转向点状态,即见图 2 中 3 - > 路线位 置,此时注意附近的转向问题。 根据船舶航迹控制原理, 针对 3 个问题的具体 要求也不相同,具体如下: 当船舶初始进入状态, 首先要确定航迹段, 然 后快速返回航迹, 最后是跟踪航迹向; 船舶在直线 段航迹状态就要保持航迹; 航迹转向点状态就要求 船舶转向后, 尽量减小航迹偏差的情况下, 快速跟 踪新航迹。
m
神经网 络 是 由 大 量 神 经 元 相 互 连 结 组 成 , 每 个神经元 基 本 单 位 的 结 构 与 功 能 比 较 简 单 , 但 神 经元基本单位组合而成的神经网络系统非常复杂 。 神经网络 系 统 能 对 信 息 进 行 大 规 模 分 布 存 储 、 并 行处理 , 具有良 好 的 容 错 性 、 自 组 织 性 和 自 适 应 性 。 同时 , 具 有 较 强 的 学 习 、 识 别 、 联 想 、 记 忆 等功能 。 神经 网 络 具 有 逼 近 任 意 复 杂 的 非 线 性 函 数的 能 力 , 这 一 能 力 已 经 被 证 明 。 因 此 , 神 经 网 络系统广泛 应 用 于 系 统 建 模 、 优 化 、 状 态 估 计 等 方面 。 在未来 , 自 适 应 控 制 与 神 经 网 络 结 合 形 成 的神经自 适 应 控 制 将 有 可 能 应 用 于 强 干 扰 、 控 制 非线性 、 难建模系统等 。 1. 2 BP 神经网络 神经网络按照网络信息传递的方向可以分为 反馈型网 络 和 前 向 网 络 。 误 差 反 向 传 播 神 经 网 络 简称 BP 网 络 。 BP 神 经 网 络 能 学 习 和 存 贮 大 量 的 输入 - 输 出 模 式 映 射 关 系 , 是 一 种 单 向 传 播 的 多 层前向网 络 , 在 存 储 信 息 前 无 需 事 前 揭 示 映 射 关 系的数学方程 。 输入层 、 输出层 、 隐层构成 BP 神 经网络 模 型 拓 扑 结 构 。 广 泛 应 用 于 自 适 应 控 制 、 图像处 理 、 模 式 识 别 、 优 化 计 算 、 系 统 辨 识 、 最 优预 测 、 函 数 拟 合 等 等 领 域 。 图 1 为 BP 网 络 示 意图 。
收稿日期: 2013 - 08 - 28 ; 修回日期: 2013 - 09 - 29 作者简介: 郭文刚( 1974 - ) , 男, 硕士, 高级工程师, 主要研究方向为电子信息系统应用仿真 、 信息系统工程综合集成等 。
· 88· 的,具有仿真控制功能。
舰
船
科
学
技
术
第 36 卷
的连接通路原路返回,并且修改各层神经元的权值, 最大程度降低使误差信号。 如图 1 所示 , BP 网络的结构图中有 M 个输入 节点 , 每个输 入 层 节 点 的 输 入 等 于 这 个 节 点 的 输 出 。 输出层隐含层有 q 个神经元 , 有 L 个输出的节 W ki 是隐含层和输出层间的连接权值 ,W ij 是输 点, 入层和隐 含 层 间 的 连 接 权 值 。 前 一 层 节 点 的 输 出 的加权 和 是 隐 含 层 和 输 出 层 节 点 的 输 入 的 总 数 , 节点的激发 函 数 、 和 、 输 入 信 号 和 决 定 节 点 的 激 励程度 。 设有 N 个训练样本,假定样本 p 的输入 / 输出模 式对 X p 和 { d pk } 进行网络训练, 隐含层的第 i 个神 经元在 p 作用下的输入为:
第7 期
郭文刚: 基于 BP 神经网络的船舶航迹控制技术
· 89·
航向、船舶航向保持等, 它是船舶航向控制系统中 最关键的控制设备。 自动舵的研制主要经历以下 4 个发展阶段: 1 ) 机械式自动舵 机械式自动舵具有比例控制功能, 降低控制增 益才能避免振荡。 当船舶惯性很大时, 比例控制的 方法不能将船舶控制在制定航向上, 且机械式自动 舵燃料消耗高,因此,未被广泛应用。 2 ) PID 自动舵 PID 自动舵在船舶航向控制中, 只要比例、 微 分和积分系数选择合适,就能实现良好的控制性能。 PID 自动舵很大程度上提高了船舶的航向控制精度 , 并且,结构简单, 参数调整方便, 在当时得到了广 泛应用。但它也存在不足, 例如在大风浪中, 转舵 角较大会引起船舶偏航严重,非常危险。 3 ) 自适应自动舵 随着自适应自动舵的发展成熟, 自适应自动舵 在船舶航向控制方面取得了突破性的进展 。 但是, 自适应自动舵设计是建立在线性系统之上的 , 实际 船舶运行是大干扰、 实际船舶运行状态是非线性、 大干扰的过程,因此自适应控制应用于船舶航迹控 制的效果受到影响。 4 ) 智能自动舵 智能自动舵采用知识表示、 符号信息处理、 启 发式程序设计等相关技术对实际事件进行规划和决 策,在实践过程中实现实际问题的求解。 属智能控 制技术包括神经网络、模糊原理等控制方法。 目前,国外已经将智能控制和船舶航向控制相 结合。但是它仍然处于仿真实验阶段, 还需要进一 步研究才能运用于实际。
and complex. In order to realize the tracks of control,the introduction of new technology ,based on neural network and the tracks of tracks related to the theory and BP neural network control principle ,to calculate the BP neural network tracking control of ships and track design through simulation that tracks under various sea conditions control comparison chart, controls on Chinese sailing ships track has some significance. Key words: BP; neural network; ship; tracking control 神经控制 属 于 学 习 控 制 , 因 此 它 是 智 能 控 制 的 一 个分支 。
q
x1 x2 xM
y1 y2 yL +
net k = ∑ w ki O i 。
j =1
( 5)
M wij 输入层
wki q 隐含层 信息流
L 输出层
由此 可 知, 输 出 层 的 第 k 个 神 经 单 位 ( 神 经 元) 的总输出个数为: O k = f( net k ) 。 ( 6) 如果给定模式的期望输出值 dk 与神经基本单 位的输出 不 一 致 , 那 么 误 差 信 号 将 沿 着 原 路 线 从 输出端反向 传 播 , 并 且 在 传 播 过 程 中 , 神 经 元 不 断修正加 权 系 数 , 使 在 输 出 结 果 最 大 可 能 的 接 近 dk 。 对样本 p 的加 权 系 数 的 调 整 完 成 后 , 再 送 入 下一个样本模式进行类似操 作 , 直 到 完 成 N 个 样 本的训练为止 。 1. 3 船舶航迹控制发展现状 自动舵主要用于完成对航迹保持的控制、 船舶
中图分类号:
BP neural network based ship tracking control technology
GUO Wengang ( China Academy of Electronics and Information Technology of China Electronic Science and Technology Group Inc, Beijing 100041 , China) Abstract: Sailing ship tracks is the expansion of the scale of control becomes increasingly difficult
第 36 卷第 8 期 2014 年 8 月
舰 船 科 学 技 术 SHIP SCIENCE AND TECHNOLOGY
Vol. 36 ,No. 8 Aug. , 2014
基于 BP 神经网络的船舶航迹控制技术
郭文刚
( 中国电子科技集团公司电子科学研究院 , 北京 100041 ) 摘 要:
航海战舰规模的扩大使船舶航迹的控制变得越来越困难 、 复杂。 为了实现船舶航迹控制, 采用新的
1
1. 1
神经网络及船舶航迹理论
神经网络 人工神经网络也简称为连接模型或称作神经网
络,由大量生物神经元的处理单元互连并联而成 , 或者与生物神经细胞相类似的大量的人工神经单位 互连组成,它是一种进行分布式并行信息处理的算 法数学模型,人工神经网络是在现代认识科学和神 经生物学对人类信息处理研究的基础上提出来的 。 这种网络通过调整内部大量节点之间相互连接的关 系,依靠系统的复杂程度, 从而达到处理信息的目