图像的几何校正
几何校正的常用方法有哪几种

几何校正的常用方法有哪几种几何校正是指通过对图像进行几何变换,使得图像中的几何结构满足某种规则或满足一定的几何要求。
常用的几何校正方法主要有:几何变换、图像扭曲校正、相机标定和校正。
1. 几何变换:几何变换是校正图像中的几何结构的一种常用方法。
通过对图像进行旋转、平移、缩放、翻转等变换操作,可以调整图像中的几何形状和位置。
常见的几何变换方法包括仿射变换、透视变换和二维码矫正。
仿射变换是一种能够保持直线平行和保持直线比例的变换方法,它由平移、旋转和缩放组成。
在图像校正中,可以使用仿射变换来调整图像的倾斜和旋转角度,使得图像中的几何结构恢复正常。
透视变换是一种能够调整图像中物体的空间形状和位置的变换方法。
它在处理有投影效果的图像时非常有效,可以用来校正图像中的透视畸变或者从巴比伦塔中恢复草地的直线。
透视变换可以通过计算图像中的对应点关系,进行透视矩阵的计算和图像的透视变换。
二维码矫正是一种通过对二维码进行几何变换,使得二维码图像中的条码恢复正常的方法。
二维码由若干个小模块组成,当二维码被拉伸或旋转时,这些小模块会变形,导致二维码无法被正常解码。
通过对二维码图像进行几何变换,可以使得二维码中的条码恢复正常,从而能够被正常解码。
2. 图像扭曲校正:图像扭曲校正是指通过调整图像的畸变变形,从而使得图像中的几何结构恢复正常。
图像扭曲校正方法主要应用在图像矫正、图像拼接和图像匹配等领域。
常见的图像扭曲校正方法包括球面校正、鱼眼校正、柱面校正等。
球面校正是一种通过将图像映射到球体上,从而消除球面畸变的方法。
球面校正适用于由鱼眼镜头拍摄的图像或者全景图像,它可以将图像中的直线变为直线,从而实现图像的几何校正。
鱼眼校正是一种通过将鱼眼图像进行逆畸变,从而消除鱼眼图像的畸变的方法。
鱼眼镜头的主要特点是中心变形,鱼眼校正可以通过对鱼眼图像进行几何变换,来实现鱼眼图像的几何校正。
柱面校正是一种通过将图像映射到柱面上,从而消除图像中的畸变的方法。
图像几何校正
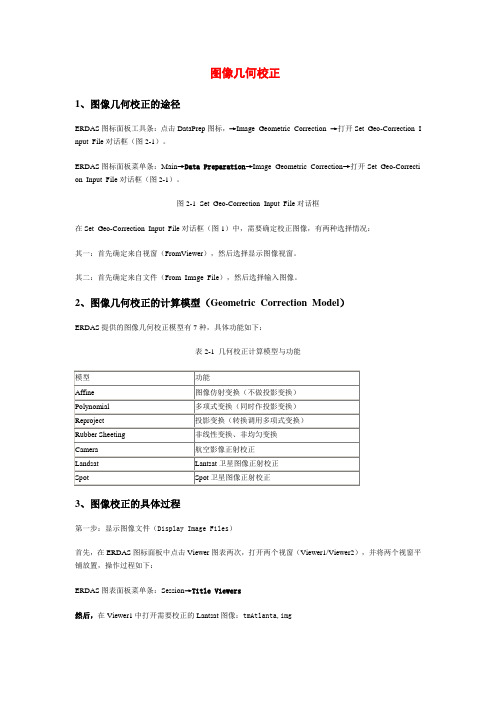
图像几何校正1、图像几何校正的途径ERDAS图标面板工具条:点击DataPrep图标,→Image Geometric Correction →打开Set Geo-Correction I nput File对话框(图2-1)。
ERDAS图标面板菜单条:Main→Data Preparation→Image Geometric Correction→打开Set Geo-Correcti on Input File对话框(图2-1)。
图2-1 Set Geo-Correction Input File对话框在Set Geo-Correction Input File对话框(图1)中,需要确定校正图像,有两种选择情况:其一:首先确定来自视窗(FromViewer),然后选择显示图像视窗。
其二:首先确定来自文件(From Image File),然后选择输入图像。
2、图像几何校正的计算模型(Geometric Correction Model)ERDAS提供的图像几何校正模型有7种,具体功能如下:表2-1 几何校正计算模型与功能3、图像校正的具体过程第一步:显示图像文件(Display Image Files)首先,在ERDAS图标面板中点击Viewer图表两次,打开两个视窗(Viewer1/Viewer2),并将两个视窗平铺放置,操作过程如下:ERDAS图表面板菜单条:Session→Title Viewers然后,在Viewer1中打开需要校正的Lantsat图像:tmAtlanta,img在Viewer2中打开作为地理参考的校正过的SPOT图像:panAtlanta,img第二步:启动几何校正模块(Geometric Correction Tool)Viewer1菜单条:Raster→Geometric Correction→打开Set Geometric Model对话框(2)→选择多项式几何校正模型:Polynomial→OK→同时打开Geo Correction Tools对话框(3)和Polynomial Model Properties对话框(4)。
如何进行卫星图像的几何校正

如何进行卫星图像的几何校正随着卫星遥感技术的快速发展,卫星图像已经成为获取地面信息的重要手段之一。
然而,由于卫星在拍摄图像时存在姿态变化、地球曲率等因素,卫星图像常常出现几何形变的问题。
为了准确分析和处理卫星图像,必须进行几何校正。
本文将介绍如何进行卫星图像的几何校正。
几何校正是将卫星图像的像素坐标转换为地理坐标的过程,主要包括图像配准、坐标变换和投影变换三个步骤。
首先,进行图像配准。
图像配准是指将待校正图像的像素位置与一个参考图像的像素位置进行匹配。
常用的方法包括特征点匹配和相关系数匹配。
特征点匹配是根据图像中的特征点(如角点、边缘等)来寻找相应特征点,并通过计算特征点之间的距离、角度等关系来确定图像间的变换模型。
相关系数匹配是通过计算图像间的灰度相关性来确定图像变换模型。
图像配准完成后,接下来是进行坐标变换。
坐标变换是将待校正图像的像素坐标转换为地球坐标,常见的坐标变换方法有仿射变换和多项式变换。
仿射变换是利用线性变换将图像中的像素坐标转换为地理坐标,通常采用最小二乘法估计变换参数。
多项式变换则是通过多项式函数描述像素坐标与地理坐标之间的关系,可以更精确地描述图像的几何变换关系。
最后,进行投影变换。
投影变换是将待校正图像从像素坐标系转换为地理坐标系的过程。
在进行投影变换时,需要选择合适的地图投影方法。
常见的地图投影方法有经纬度投影、UTM投影、Lambert投影等。
选择合适的地图投影方法能够保持图像的几何形状和相对位置关系,提高后续分析和处理的准确性。
除了以上三个步骤,还需要注意一些细节问题。
首先,要根据卫星的姿态参数进行几何校正。
卫星在拍摄图像时会出现姿态的变化,所以需要根据实际的姿态参数对图像进行矫正。
其次,要考虑地球曲率的影响。
由于地球并非平面,图像中的像素在地面上的位置会发生畸变,所以需要考虑地球曲率对图像的影响,进行相应的几何变换。
在进行卫星图像的几何校正时,还需要注意一些常见的问题。
图像几何校正
图像几何校正
图像几何校正:通过计算机对图像每个像元逐个地解析纠正处理完成。包 括两项任务:
(1) 像元坐标变换 (2) 像元灰度值重新计算(重采样)
1.像元坐标变换
像元坐标变换:确定原始图像和纠正后图像之间的坐标变换关系。 两种实现方法:
直接法:从原始图像阵列出发,依次对其中每一个像元分别计算其在输出(纠 正后)图像的坐标,公式为: X F ( x , y )
图像几何校正
张子民 zhangzimin@
山东建筑大学土木学院
图像几何校正
图像校正有两方面的作用:
赋予图像地理坐标(只有具有地理坐标,才能够进行距离、面积和角度的量算) 校正图像的变形(纸质图像的变形和扫描时的变形)
原始图像距离:539像素 校正后的地理坐标:1000码
Pg
i
16
i
g x'y'
i 1 16
pi
i 的灰度值
, 公式为 p i 1 / d i , d i 为 i 到投; : 输出像元灰度值
, g i : 相邻像元点
p i : 像元点 i 对投影点的权重
, 常用距离度量
图像几何校正
多项式系数求出后,根据上述公式可以求解原始图像任一像元的坐标,并 对图像灰度进行内插,获取校正后的图像。
1.像元坐标变换
多项式的基本图形:
问题:选用几次多项式合适? 认识龙格现象
2.像元灰度值的重采样
校正前后图像的分辨率变化、像元点位置相对变化引起输出图像阵列中的 同名点灰度值变化。 重采样:P’的灰度值取决于周围列阵点上像元的灰度值对其所作的贡献。
2.像元灰度值的重采样
几何校正的步骤
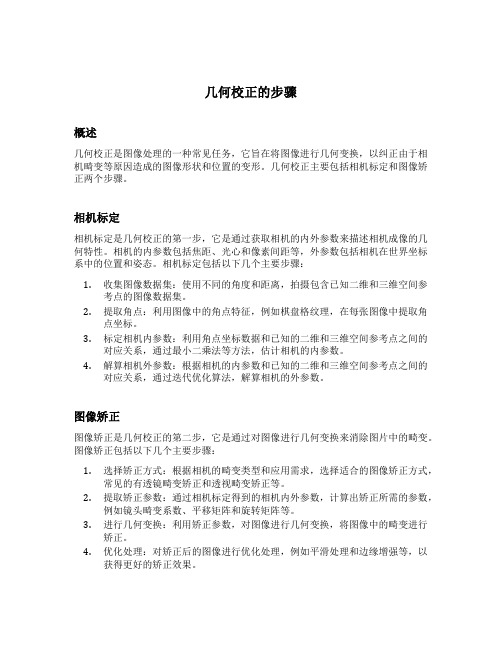
几何校正的步骤概述几何校正是图像处理的一种常见任务,它旨在将图像进行几何变换,以纠正由于相机畸变等原因造成的图像形状和位置的变形。
几何校正主要包括相机标定和图像矫正两个步骤。
相机标定相机标定是几何校正的第一步,它是通过获取相机的内外参数来描述相机成像的几何特性。
相机的内参数包括焦距、光心和像素间距等,外参数包括相机在世界坐标系中的位置和姿态。
相机标定包括以下几个主要步骤:1.收集图像数据集:使用不同的角度和距离,拍摄包含已知二维和三维空间参考点的图像数据集。
2.提取角点:利用图像中的角点特征,例如棋盘格纹理,在每张图像中提取角点坐标。
3.标定相机内参数:利用角点坐标数据和已知的二维和三维空间参考点之间的对应关系,通过最小二乘法等方法,估计相机的内参数。
4.解算相机外参数:根据相机的内参数和已知的二维和三维空间参考点之间的对应关系,通过迭代优化算法,解算相机的外参数。
图像矫正图像矫正是几何校正的第二步,它是通过对图像进行几何变换来消除图片中的畸变。
图像矫正包括以下几个主要步骤:1.选择矫正方式:根据相机的畸变类型和应用需求,选择适合的图像矫正方式,常见的有透镜畸变矫正和透视畸变矫正等。
2.提取矫正参数:通过相机标定得到的相机内外参数,计算出矫正所需的参数,例如镜头畸变系数、平移矩阵和旋转矩阵等。
3.进行几何变换:利用矫正参数,对图像进行几何变换,将图像中的畸变进行矫正。
4.优化处理:对矫正后的图像进行优化处理,例如平滑处理和边缘增强等,以获得更好的矫正效果。
总结几何校正是图像处理中的重要任务,通过相机标定和图像矫正两个步骤,可以纠正由于相机畸变引起的图像形状和位置的变形。
相机标定包括收集图像数据集、提取角点、标定相机内参数和解算相机外参数等步骤;图像矫正包括选择矫正方式、提取矫正参数、进行几何变换和优化处理等步骤。
几何校正可以广泛应用于计算机视觉、机器人技术和虚拟现实等领域,具有重要的实际意义和应用前景。
医学图像处理中的几何校正方法与注意事项

医学图像处理中的几何校正方法与注意事项医学图像处理是现代医学领域中不可或缺的一部分,它通过对医学图像的处理和分析,帮助医生进行疾病的诊断和治疗。
在医学图像处理中,几何校正是一个重要的步骤,它能够纠正图像中的几何形状和位置偏差,提高图像的质量和准确性。
本文将介绍医学图像处理中常用的几何校正方法以及需要注意的事项。
一、刚体变换刚体变换是最常用的几何校正方法之一,它通过平移、旋转和缩放等操作,将图像中的物体几何形状和位置进行调整。
在医学图像处理中,刚体变换常用于纠正图像中的旋转和平移变形。
例如,在X射线图像中,患者的身体可能会因为体位不正而导致图像出现旋转或平移的变形,通过刚体变换可以将图像恢复到正确的位置和形状。
然而,在应用刚体变换进行几何校正时,需要注意以下几点。
首先,刚体变换只适用于具有刚性变形的物体,对于存在非刚性变形的图像,刚体变换无法完全纠正。
其次,刚体变换需要通过选取特定的关键点或特征进行配准,因此在选择关键点时需要注意其代表性和稳定性,以确保几何校正的准确性。
二、仿射变换仿射变换是一种更加灵活的几何校正方法,它可以通过平移、旋转、缩放和错切等操作,对图像进行更加精细的调整。
在医学图像处理中,仿射变换常用于纠正图像中的局部形变和畸变。
例如,在核磁共振成像中,由于磁场不均匀或患者的呼吸运动,图像可能会出现局部形变或畸变,通过仿射变换可以对图像进行局部校正,提高图像的准确性和可读性。
然而,仿射变换也存在一些限制和注意事项。
首先,仿射变换只能处理线性变形,对于非线性变形的图像,需要采用更加复杂的非线性变换方法。
其次,仿射变换需要通过选取一定数量的关键点或特征进行配准,因此在选择关键点时需要注意其分布和数量,以保证几何校正的有效性和稳定性。
三、弹性变形弹性变形是一种更加高级和复杂的几何校正方法,它可以通过建立物体的弹性模型,对图像进行非线性的形变和调整。
在医学图像处理中,弹性变形常用于纠正图像中的非刚性变形和畸变。
图像的几何校正.
对于(i+u,j+v)有 f(i+u,j+v)=[f(i+1,j+v)-f(i,j+v)]u+f(i,j+v) = (1 u)(1 v) f (i, j ) (1 u)vf (i, j 1) u(1 v) f (i 1, j ) uvf (i 1, j 1)
几何校正方法
图像几何校正的基本方法是先建立几何校正的数学模型; 其次利用已知条件确定模型参数;最后根据模型对图像进行 几何校正。通常分两步: ①图像空间坐标变换;首先建立图像像点坐标(行、列 号)和物方(或参考图)对应点坐标间的映射关系, 解求映射关系中的未知参数,然后根据映射关系对图 像各个像素坐标进行校正; ②确定各像素的灰度值(灰度内插)。
来描述。
通常h1(x,y)和h2(x,y)可用多项式来近似
x aij x i y j
n
n i
y bij x i y j
i 0 j 0
i 0 j 0 n a00 a10 x a01 y y b00 b10 x b01 y
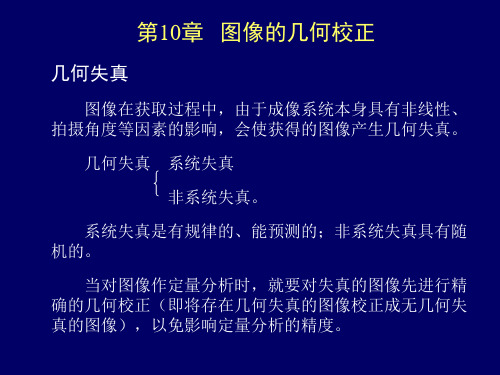
第10章 图像的几何校正
几何失真
图像在获取过程中,由于成像系统本身具有非线性、 拍摄角度等因素的影响,会使获得的图像产生几何失真。 几何失真 系统失真
非系统失真。
系统失真是有规律的、能预测的;非系统失真具有随 机的。 当对图像作定量分析时,就要对失真的图像先进行精 确的几何校正(即将存在几何失真的图像校正成无几何失 真的图像),以免影响定量分析的精度。
n n i i j x h ( x , y ) a x y 1 ij i 0 j 0 n n i i j y h ( x, y ) b x y 2 ij i 0 j 0
遥感图像的几何校正

Polynomial——多项式变换(同时做投影变换) ,设待纠正图像上飞像点 坐标(X,Y)和纠正后相应像点的坐标(x,y)可以用下 面的多项式来表示: x = a00+ a10 X + a01 Y + a20 X 2 + a11 XY + a02 Y 2 + ⋯ y = b00+ b10 X + b01 Y + b20 X 2 + b11 XY + b02 Y 2 + ⋯ 式中 aij,bij 为待求系数。多项式变换在卫星图像校正过程 中应用较多,在调用多项式模型时,需要确定多项式的次方数, 整景图像选择 3 次方。 次方数与所需要的最少控制点数是相关的,最少控制点计算公 式为( t + 1 × t + 2 ) 2,式中 t 为次方数,即 1 次方最少需 要 3 个控制点,2 次方最少需要 6 个控制点,3 次方需要 10 个控 制点。 Rubber Sheeting——非线性、非均匀变换。 采点模式: ① 视窗采点模式,直接在视窗中采点; ② 文件采点模式,直接读入控制点文件或 ASCLL 码文件; ③ 地图采点模式,通过数字化仪采点或通过键盘输入控制点。 重采样方法: ① Nearest Neighbor——邻近点插值法, 将最邻近像元值直接赋予输出像 元。特点:运算量最小,但是内插精度较低。 ② Bilinear Interpolation——双线性插值法, 用双线性方程和 2×2 窗口输 出像元值。特点:内插精度和运算量都比较适中; ③ Cubic Convolution——立方卷积插值法,用三次方程和 4×4 窗口计算 输出像元值。特点:内差精度高,缺点是运算量很大;
④ Bicubic Spline Interpolation——双三次样条插值, 产生比双线性插值更 平滑的图像边缘。 三、几何校正的方法
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对于(i+u,j+v)有 f(i+u,j+v)=[f(i+1,j+v)-f(i,j+v)]u+f(i,j+v)
= ( 1 u ) 1 v ) ( f ( i , j ) ( 1 u ) v ( i , j 1 f ) u ( 1 v ) f ( i 1 , j ) u ( i 1 , j v 1 )
来描述。
通常h1(x,y)和h2(x,y)可用多项式来近似
n ni
x
aijxi yj
i0 j0
n ni
y
bijxi yj
i0 j0
当n=1时,畸变关系为线性变换,
xa00 a1x 0a0y 1
yb00 b1x0b0y 1
上述式子中包含a00、a10、a01 b00、b10、b016个未知数, 至少需要3个已知点来建立方程式,解求未知数。
但该图像像素分布是不规则的,会出现像素挤压、疏 密不均等现象,不能满足要求。因此最后还需对不规则图 像通过灰度内插生成规则的栅格图像。
二、间接法
设恢复的图像像素在基准坐标系统为等距网格的交 叉点,从网格交叉点的坐标(x,y)出发,根据
x h1(x, y)
n
ni
aij xi y j
i0 j0
n ni
c=[s(1+u) s(u) s(1-u) s(2-u)]T 该算法计算量最大,但内插效果最好,精度最高。
常用的图像几何变换介绍
图像处理时,往往会遇到需要对图 像进行放大、缩小、旋转等操作。因为 像素是离散的,所以经过坐标变换之后, 如果不进行处理,就会产生畸变。
1 图像的缩小
一、图像的尺寸减半: 2M*2N的图像缩小为:M*N的图像。
几何校正方法
图像几何校正的基本方法是先建立几何校正的数学模型; 其次利用已知条件确定模型参数;最后根据模型对图像进行 几何校正。通常分两步:
①图像空间坐标变换;首先建立图像像点坐标(行、列 号)和物方(或参考图)对应点坐标间的映射关系, 解求映射关系中的未知参数,然后根据映射关系对图 像各个像素坐标进行校正;
第10章 图像的几何校正
几何失真
图像在获取过程中,由于成像系统本身具有非线性、 拍摄角度等因素的影响,会使获得的图像产生几何失真。
几何失真 系统失真
非系统失真。
系统失真是有规律的、能预测的;非系统失真具有随 机的。
当对图像作定量分析时,就要对失真的图像先进行精 确的几何校正(即将存在几何失真的图像校正成无几何失 真的图像),以免影响定量分析的精度。
由于间接法内插灰度容易,所以一般采用间接法进行 几何纠正。
10.2 像素灰度内插方法
常用的像素灰度内插法有最近邻元法、双线性内插法 和三次内插法三种。
1.最近邻元法
在待求点的四邻像素中,将距离这点最近的相邻像素 灰度赋给该待求点。
该方法最简单,效果尚佳,但校正后的图像有明显锯齿 状,即存在灰度不连续性。
其中 A=[s(1+v) s(v) s(1-v) s(2-v)]
f(i1,j1) f(i1,j) f(i1,j1) f(i1,j2)
B
f(i,j1)
f(i,j)
f(i,j1)
f(i,j2)
f(i1,j1) f(i1,j) f(i1,j1) f(i1,j2)
f(i2,j1) f(i2,j) f(i2,j1) f(i2,j2)
几何校正方法可分为直接法和间接法两种。
一、直接法
根据
x h1(x, y)
n
ni
aijxi y j
i0 j0
y
h2 (x ,
y)
n i0
ni
bijxi y j
j0
和若干已知点坐标,解求未知参数;然后从畸变图像出发, 根据上述关系依次计算每个像素的校正坐标,同时把像素 灰度值赋予对应像素,这样生成一幅校正图像。
当n=2时,畸变关系式为
x a 0 0 a 1 x 0 a 0 y 1 a 2 x 2 0 a 1 x 1 a y 0 y 2 2
y b 0 0 b 1 x 0 b 0 y 1 b 2 x 2 0 b 1 x 1 b y 0 y 2 2
包含12个未知数,至少需要6个已知点来建立关系式, 解求未知数。
②确定各像素的灰度值(灰度内插)。
10.1 空间坐标变换 实际工作中常以一幅图像为基准,去校正几何失真图
像。通常设基准图像f(x,y)是利用没畸变或畸变较小的摄像
系统获得的,而有较大几何畸变的图像用g(x´,y´)表示,下
图是一种畸变情形。
设两幅图像几何畸变的关系能用解析式 xh1(x,y)
yh2(x,y)
该方法要比最近邻元法复杂,计算量大。但没有灰 度不连续性的缺点,结果令人满意。它具有低通滤波性 质,使高频分量受损,图像轮廓有一定模糊。
Bilinear vs Nearest Neighbour:
Original
Nearest Neighbour
Bilinear
3.三次内插法
该方法利用三次多项式S(x)来逼近理论上的最佳插值 函数sin(x)/x。其数学表达式为:
y
h2
(
x,
y)
i0
bij xi y j
j 0
和若干已知点,解求未知数。据此推算出各格网点在已 知畸变图像上的坐标(x‘,y’)。由于(x‘,y’)一般不为 整数,不会位于畸变图像像素中心,因而不能直接确定 该点的灰度值,而只能由该像点在畸变图像的周围像素 灰度值内插求出,将它作为对应像素(x,y)的灰度值, 据此获得校正图像。
处理方法是: 取偶数行和偶数列构成新的图像。
二、图像的任意成比例的缩小: M*N大小的图像缩小为:L*S大小。
12|x|2|x|3 0|x|1
S(x)48|
x|5|
x|2
|
x|3
1|x|2
0
ห้องสมุดไป่ตู้
|x|2
(i-1,j-1)
u v (x,y)
(i-1,j+2)
(i+2,j-1)
(i+2,j+2)
待求像素(x,y)的灰度值由其周围十六个点的灰度值加权 内插得到。可推导出待求像素的灰度计算式如下:
f(x,y)=A‧B ‧ C
2.双线性内插法
双线性内插法是利用待求点四个邻像素的灰度在二方向 上作线性内插。如图,下面推导待求像素灰度值的计算式。
对于(i,j+v)有 f(i,j+v)=[f(i,j+1)-f(i,j)]v
+f(i,j)
对于(i+1,j+v)有 f(i+1,j+v)=[f(i+1,j+1)-
f(i+1,j)]v+f(i+1,j)